вданной работе описывается применение рядов Вольтера для анализа схем, содержащих устройства со слабой нелинейностью. Работа исследует и доказывает рациональность метода
СОДЕРЖАНИЕ: Республиканский конкур научных работ студентов высших учебных заведений Республики Беларусь по гуманитарным, естественным и техническим наукамБелорусский Государственный Университет
Информатики и Радиоэлектроники
Республиканский конкур научных работ студентов высших учебных заведений Республики Беларусь по гуманитарным, естественным и техническим наукам
Девиз: «Точность и Рациональность»
Работа на тему:
Применение рядов Вольтера для анализа нелинейных схем,
применяемых в обработке сигналов
Научная секция:
Радиотехника и связь, вычислительная, цифровая и микропроцессорная техника, приборостроение, СВЧ-электроника
Автор:
Мельниченко Сергей Игоревич
студент I курса
Научный руководитель:
Леонович Анатолий Александрович,
доцент, канд. физ.-мат. наук
Минск 2004
РЕФЕРАТ
В данной работе описывается применение рядов Вольтера для анализа схем, содержащих устройства со слабой нелинейностью. Работа исследует и доказывает рациональность метода.
Результаты данной работы могут применяться в разработке различных приборов и устройств, которые используются для обработки ВЧ и СВЧ сигналов.
В работе представлены теоретические обоснования метода, а также примеры анализа с использованием данного метода.
Работа представлена на 20 страницах, содержит 16 иллюстраций, графиков и схем, а также 2 приложения. В написании было использовано 10 литературных источников.
Ключевые слова работы: ряды Вольтера, анализ нелинейных схем, сигнал.
ОТЗЫВ
Работа затрагивает достаточно актуальную проблему выбора метода анализа схем, содержащих устройства со слабой нелинейностью. Можно предположить, что если моделирующая программа на основе данного метода позволит определять изображения т.н. ядер ряда Вольтерра, исключая кропотливый труд по выводу формул ядер, и позволит наглядно представлять в графической форме обобщенные частотные характеристики, то аппарат анализа на основе рядов Вольтерра получит более широкое признание. Ввиду сложности анализа системы с нелинейностью общего вида, он проводится тогда, когда нелинейность является существенной. Метод ряда Вольтерра позволяет исследовать системы с мягкими инерционными нелинейностями и может занять промежуток между методами анализа линейных систем и методами анализа нелинейным системам с существенными нелинейностями.
Самым большим недостатком метода анализа на основе рядов Вольтерра являются случающиеся время от времени затруднения в решении в случае, когда было превышено требование на малую нелинейность. Есть несколько характерных признаков, по которым можно определить, что начальные условия вышли за рамки допустимых. Например, при увеличении сигнала интермодуляционные составляющие не входят в насыщение, а продукты преобразования на фундаментальных частотах насыщаются слабо. Здесь как никогда полезен некоторый практический опыт.
Научный руководитель _____________
СОДЕРЖАНИЕ
Введение......................................................................................................................................5
1. Кратко о функциональном ряде Вольтерра........................................................6
2. Анализ на основе рядов Вольтерра........................................................................8
3. Детализация структуры модели нелинейной системы....................................12
4. Пример анализа методом рядов Вольтера...........................................................18
5. Пример модели умножителя частоты....................................................................22
Заключение...................................................................................................................................26
Список использованных источников..................................................................................27
Приложения..................................................................................................................................28
1. Приложение 1...............................................................................................................28
2. Приложение 2...............................................................................................................28
ВВЕДЕНИЕ
Большинство программ моделирования ВЧ и СВЧ схем базируются на методе гармонического баланса. Этот метод предлагается как средство решения задач любого рода, с чем он, согласно установившемуся мнению, успешно справляется.
На практике имеются задачи, с решением которых метод гармонического баланса справляется не совсем хорошо. К этой области можно отнести задачи анализа схем со слабо выраженной нелинейностью или схем, на вход которых подаются сигналы малого уровня, например, моделирование малосигнального усилителя на полевом транзисторе. Можно было бы предположить, что анализ такой малосигнальной схемы не вызовет особых затруднений, но на практике всё оказывается намного сложнее, так как большинство мо-делей твердотельных устройств не предназначены для анализа методом гармонического баланса, а сам метод весьма чувствителен к едва уловимым ошибкам, громоздок и раздражающе медленен.
Анализ на основе рядов Вольтерра является наиболее подходящим методом для моделирования схем со слабой нелинейностью. Он идеально подходит для оценки интермодуляционных искажений (IM), анализа схем, работающих в линейном режиме (т. е., ниже точки компрессии усиления по уровню минус 1 дБ), и схем, выполняющих преобразование амплитудной модуляции в фазовую (AM-to-PM). Анализ на основе рядов Вольтерра для такого рода задач предлагает значительно большую точность и скорость, на несколько порядков превышающие получаемые при использовании метода гармонического баланса. Кроме того, он хорошо интегрируется с распространёнными методами анализа линейных схем и даёт возможность одновременной оптимизации нелинейных эффектов и коэффициентов шума, передачи и отражения. С учётом всех перечисленных преимуществ, этот метод может считаться оптимальным для анализа схем со слабой нелинейностью.
1. КРАТКО О ФУНКЦИОНАЛЬНОМ РЯДЕ ВОЛЬТЕРРА
Пусть имеется нелинейная система с одним входом и одним выходом, описываемая оператором:
y(t) = N{x(t)}, (1.1)
здесь: x(t) – входной сигнал системы;
y(t) – выходной сигнал системы;
N{} – нелинейный оператор.
Тогда, при довольно слабых требованиях, предъявляемых к виду оператора, выходной сигнал системы может быть представлен в виде [1,5,6]:
 , (1.2)
, (1.2)
здесь qk (t1 , t2 , …, tk ) – ядро ряда Вольтерра k-й степени,
k-мерная весовая функция.
Как видно, ряд Вольтерра является обобщением интеграла свертки, широко используемого в теории линейных систем. В результате такого представления оператора, можно построить модель системы в виде параллельного соединения звеньев, соответствующих каждому из слагаемых ряда. Вопросы сходимости ряда анализируются, например, в [5], скорость сходимости определяет число звеньев, достаточных для моделирования системы с требуемой точностью. Ясно, что чем меньше абсолютная величина x(t), тем меньше членов потребуется.
Если применить к каждому ядру преобразование Лапласа соответствующего порядка, то схема примет вид параллельного соединения звеньев с многомерными передаточными функциями [5]:
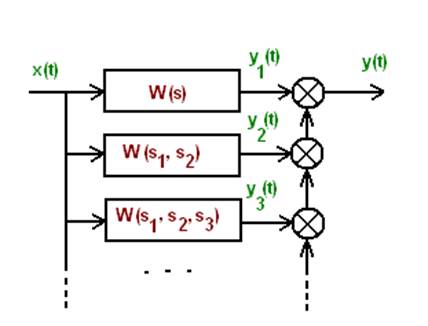
Рис. 1.1. Модель нелинейной системы в виде параллельной структуры звеньев с многомерными передаточными функциями. W(s) – передаточная функция линейной части системы
2. АНАЛИЗ НА ОСНОВЕ РЯДОВ ВОЛЬТЕРРА
При анализе методом рядов Вольтерра производится расчёт уровней различных интермодуляционных составляющих, чаще называемых продуктами преобразования. Как правило, наибольший интерес представляют получаемые при двухтональном воздействии интермодуляционные составляющие третьего порядка, рассчитываемые по формуле 2f2 – f1 , где f1 и f2 — частоты двух сигналов, подаваемых на анализируемое устройство. Между тем, анализ на основе рядов Вольтерра не ограничивается анализом интермодуляционных искажений. Кратные гармоники сигналов, продукты AM-to-PM преобразования и многое другое могут быть описаны как результат смешивания частот сигналов возбуждения. Порядок продукта преобразования или интермодуляционной составляющей определяется просто как сумма коэффициентов частот. То есть, если продукт преобразования получен по формуле:
f = mf1 + nf2 + pf3 + ... , (2.1)
то его порядок будет равен:
О = |m| + |n| + |p| + ... . (2.2)
Заметим, что некоторые продукты более высоких порядков могут совпадать по частоте с продуктами низких порядков, например, если продукт преобразования третьего порядка рассчитывается по формуле:
f = f + f – f. (2.3)
Поскольку в преобразовании здесь участвуют три частоты, то это продукт преобразования третьего порядка. Однако, конечное значение совпадает с фундаментальной частотой. Может показаться странным, но это важный продукт: интерференция между этой составляющей и полезным фундаментальным продуктом преобразования может использоваться для определения точки компрессии или параметров AM-to-PM преобразования. Аналогичным образом, кратные гармоники сигнала можно представить как:
2f = f + f , (2.4)
то есть, сигнал как бы смешивается сам с собой.
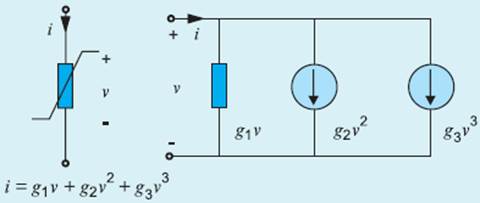
Рис. 2.1. Нелинейный резистор может быть представлен как линейный, соединенный параллельно с двумя нелинейными источниками тока. Параметры этих источником могут быть выбраны таким образом, чтобы каждый определял один порядок и зависел от напряжений низших порядков
Наиболее общая реализация анализа на основе рядов Вольтерра базируется на так называемом методе нелинейных токов. При этом подходе, каждый нелинейный элемент схемы преобразуется в линейный элемент с множеством параллельно включённых источников тока. Рассмотрим, например, эквивалентную схему нелинейного резистора, изображённую на рис. 2.1. Нелинейные свойства элемента полностью определяются дополнительными источниками тока. Ток очередного порядка нелинейности определяется напряжением на элементе при учёте всех нелинейностей меньшего порядка, так что все токи рассчитываются через рекуррентные соотношения. Сначала рассчитывается напряжение элемента первого порядка, затем ток второго порядка. После этого в качестве сигнала возбуждения на схему подаётся ток второго порядка, и получается напряжение элемента второго порядка. Ток третьего порядка получается из напряжений первого и второго порядков, и этот процесс повторяется, пока не будут получены продукты преобразования всех интересующих порядков. Предположим, например, что нам необходимо рассчитать продукт преобразования, получаемый по формуле 2f2 – f1 . Вполне очевидно, что схема должна сначала быть проанализирована на частотах f1 и f2 . Затем программа моделирования анализирует схему на частотах продуктов второго порядка, 2f2 и f2 – f1 . Наконец, она получает все части, необходимые для расчёта интересующего нас продукта преобразования третьего порядка 2f2 – f1 . В итоге, получается решение на нужной нам частоте, а также линейные характеристики и пара продуктов преобразования второго порядка, выступающих как побочные.
При анализе на основе рядов Вольтерра моделируемая схема описывается как комбинация линейных и нелинейных элементов. Линейные элементы описываются обычным образом: резисторы, конденсаторы, линии передачи и так далее. Нелинейные элементы описываются разложением в ряд Тейлора их вольтамперной (I/V) или кулонвольтной (Q/V) характеристик. Например, нелинейный резистор, имеющий вольтамперную характеристику:
I = fR (V), (2.5)
описывается разложением в ряд Тейлора вблизи рабочей точки смещения (V0 , I0 ):
 , (2.6)
, (2.6)
где i — ток, а v — напряжение в режиме малого сигнала.
Нас интересуют только малосигнальные значения v и i, а производные в любой точке представляют собой не что иное как константы. Поэтому, в определённой точке смещения ряд (2.6) может быть написан в виде:
i = g1 v + g2 v2 + g3 v3 + ... (2.7)
Заметим, что g1 = 1/R, где R — линейное сопротивление в рабочей точке смещения в малосигнальном режиме.
Разложение в ряд Тейлора имеет силу только для небольших отклонений от его центрального параметра, так что выражение (2.7) для тока в малосигнальном режиме верно только когда v V0 и i I0 . Это требование является фундаментальным ограничением метода анализа на основе рядов Вольтерра: он работает только когда входной сигнал мал настолько, что значения производных вольтамперной характеристики остаются постоянными при соответствующем отклонении постоянного напряжения и тока от рабочей точки смещения. Мы говорим, что такой элемент схемы имеет слабую нелинейность, то есть нелинейность должна быть слаба, а входное воздействие мало настолько, что возможно представление вольтамперной или кулонвольтной характеристики элемента в виде разложения в ряд Тейлора1).
На практике это означает, что уровень входного сигнала должен быть таким, чтобы анализируемый элемент работал значительно ниже его точки насыщения. По этой причине, анализ на основе рядов Вольтерра не подходит для анализа смесителей, умножителей частоты, усилителей мощности, работающих в режиме насыщения, и других подобных им устройств. Тем не менее, он идеально подходит для анализа интермодуляционных искажений в малосигнальных усилителях, электронных коммутаторах, фазовращателях, аттенюаторах и подобных им схемах.
3. ДЕТАЛИЗАЦИЯ СТРУКТУРЫ МОДЕЛИ НЕЛИНЕЙНОЙ СИСТЕМЫ
Рассмотрим нелинейную систему, описываемую дифференциальным уравнением общего вида, моделирующим широкий класс систем и объектов:
L[ y(t)] + D( y, y, y, …, y(n) ) = x(t) , (3.1)
где: x(t) – воздействие на систему;
y(t) – реакция системы;
L[ y(t)] – линейный оператор;
D( y, y, y,…, y(n)
) – нелинейная, гладкая, дифференцируемая функция.
предполагается, что D(.) не содержит линейные члены, они учтены в L[.].
Сформулируем и докажем теорему, позволяющую детализировать структуру системы, описываемой дифференциальным уравнением (3.1).
Теорема. Ядра ряда Вольтерра системы, описываемой уравнением (3.1), можно представить в виде:
W1 (s) = L-1 (s) (3.2)
 , (3.3)
, (3.3)
где: L-1 (s) = W(s) – оператор, обратный оператору L(s), передаточная функция линейной части системы.
Доказательство: В соответствии со схемой рис.1.1 представим реакцию системы в виде:
y(t) = y1 + y2 + y3 + ... , (3.4)
здесь: y1
= y1
(t) – реакция линейной части системы;
y2
= y2
(t) – реакция нелинейного элемента второго порядка и т.д.
Разложим в кратный ряд Тейлора функцию D( y, y, y, …, y(n) ):
 , (3.5)
, (3.5)
где коэффициенты в суммах находятся дифференцированием D(.) по соответствующим аргументам.
Подставим компоненты решения (3.4) в (3.5), а результат в (3.1). Для определения первого ядра приравняем в полученном уравнении члены первого порядка:
L[ y1 ] = x(t) . (3.6)
Отсюда
y1 (t) = L-1 [x(t)] , (3.7)
или, в операторной форме:
Y1 (s) = L-1 (s) X(s) = W(s) X(s) . (3.8)
Поэтому, изображение первого ядра, т.е. передаточная функция линейной части системы, будет равно:
W1 (s) = W(s) = L-1 (s) . (3.9)
Сгруппируем и приравняем в члены второго порядка:
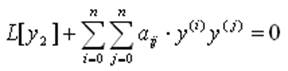 . (3.10)
. (3.10)
Поскольку Y1 (s) = L-1 (s) X(s), а по теореме о последовательном соединении нелинейной и линейной частей [2, 4, 6] (см. приложение) изображение результата действия линейного оператора на компоненту решения второго порядка имеет вид:
L[ y2 ] ® L(s1 + s2 ) Y2 (s1 , s2 ) , (3.11)
то
 . (3.12)
. (3.12)
Y2 (s1 , s2 ) = L-1 (s1 ) L-1 (s2 ) G2 (s1 , s2 ) L-1 (s1 + s2 ) X(s1 ) X(s2 ) , (3.13)
где
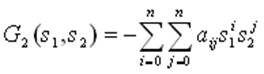 . (3.14)
. (3.14)
Из (2.13) и (2.14) следует
W2 (s1 , s2 ) = L-1 (s1 ) L-1 (s2 ) G2 (s1 , s2 ) L-1 (s1 + s2 ) , (3.15)
или, в других обозначениях:
W2 (s1 , s2 ) = W1 (s1 ) W1 (s2 ) G2 (s1 , s2 ) W1 (s1 + s2 ) . (3.16)
Изображение G2 (s1 , s2 ) инерционно-нелинейной компоненты можно назвать ядрышком второго порядка.
Из (3.16) следует, что структурную схему ветви второго порядка системы, описываемой (3.1), можно представить в виде:

Рис. 3.1. Структура модели нелинейной компоненты второго порядка, порождаемой уравнением (3.1). Ядро дважды осуществляет линейное преобразование: до нелинейного и после него
Т.о. составляющая второго порядка выходного сигнала обязательно является результатом линейного преобразования выходного сигнала ядрышка G2 (s1 , s2 ).
Двумерная передаточная функция G2 (s2 , s1 ), совершающая нелинейное преобразование второго порядка, определяется частными производными второго порядка функции D(.) и операциями дифференцирования – см. (3.5) и (3.14).
Далее доказательство проведем по индукции.
Пусть передаточная функция k-1 порядка для k 2 имеет вид:
 . (3.17)
. (3.17)
Группируя и приравнивая члены k-го порядка, получим:
 . (3.18)
. (3.18)
В (3.18) берется сумма всех тех произведений компонент решения (6) и их производных, сумма нижних индексов которых равна r1 + r2 + … + rr = k. Индексы r1, r2, …, rr могут принимать значения от 1 до (k-1). Значения индексов j1, j2, …, jr (степеней производных) меняются от 0 до n каждое. Поскольку по условию задачи разложение D( y, y, y, …, y(n) ) начинается с членов второго порядка (3.4), то в произведениях суммы уравнения (3.18) присутствуют лишь отклики yi (j) с порядком, меньшим k (i k). Это значит, что k-я компонента решения yk выражается из (3.18) только через младшие компоненты.
Сгруппируем компоненты k-й степени с учетом того, что изображения младших ядер отвечают (3.17):
 (3.19)
(3.19)
Поскольку каждая передаточная функция вида Wrm
(sr
(m-1)+1
, sr
(m-1)+2
, …, srm
) содержит в соответствии с (3.17) в качестве сомножителя произведение 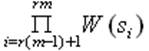 и сумма индексов r1 + r2 + … + r(m-1) + rm + ... + rr равна k, то каждое слагаемое суммы в (3.19) содержит произведения
и сумма индексов r1 + r2 + … + r(m-1) + rm + ... + rr равна k, то каждое слагаемое суммы в (3.19) содержит произведения ![]() и
и ![]() которые могут быть вынесены за скобки. Поэтому
которые могут быть вынесены за скобки. Поэтому
 , (3.20)
, (3.20)
где:
 (3.21)
(3.21)
Наконец, из (3.20) видно, что
 . (3.22)
. (3.22)
Теорема доказана.
![]()
Рис. 3.2. Структура изображения ядра n-го порядка
Как видно на рис. 3, алгоритм преобразования сигнала компонентой схемы n-го порядка состоит в том, что вначале входной сигнал фильтруется линейной частью системы, затем следует нелинейное инерционное преобразование, продукты которого вновь фильтруются линейной частью. Нелинейное инерционное преобразование определяется (3.21) и состоит из комбинации безинерционных операций возведения в степень и перемножения сигналов, прогнозирующей операции дифференцирования и инерционной операции линейного преобразования сигнала, определяемой переходной функцией линейной части системы.
Из доказанной теоремы следует, что схема рис. 1.1 может быть детализирована следующим образом:
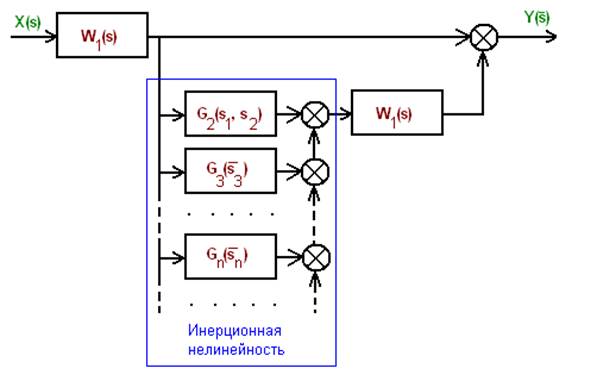
Рис. 3.3. Детализация структуры системы, описываемой уравнением (3.1). Выходной сигнал является результатом фильтрации линейной частью системы как входного сигнала, так и продуктов его нелинейного преобразования. На инерционную нелинейность входной сигнал системы поступает после предварительной его фильтрации линейной частью системы
4. ПРИМЕР АНАЛИЗА МЕТОДОМ РЯДОВ ВОЛЬТЕРРА
На рис. 4.1 показан малосигнальный однокаскадный усилитель диапазона 7–11 ГГц, состоящий из одного полевого транзистора (FET) и типовых прототипов согласования на сосредоточенных элементах. Модель полевого транзистора FET состоит из линейной эквивалентной схемы и одного нелинейного управляемого источника тока, чего, как правило, достаточно для правильного моделирования обычного полевого транзистора с барьером Шоттки (MESFET) для анализа методом рядов Вольтерра.
Рис. 4.1. Анализ данного усилителя проводился методом рядов Вольтерра. Практически все элементы эквивалентных согласующих цепей были реализованы как распределенные
На рис. 4.2 показаны частотные зависимости усиления и уровня интермодуляционных составляющих третьего порядка. Расчёт методом рядов Вольтерра проводится настолько быстро, что стало возможным настраивать схему в режиме реального времени, выполняя при этом нелинейный анализ. В результате, нелинейная схема может быть оптимизирована вручную или с помощью автоматического оптимизатора почти так же быстро, как и линейная.
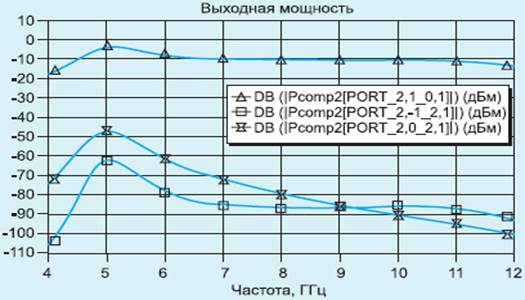
Рис. 4.2. Рассчитанные зависимости уровней мощности основной (D), второй и 2f2 - f1 гармоник сигнала на выходе СВЧ усилителя в диапазоне 7-11 ГГц при уровне входного сигнала -20дБм
На рис. 4.3 показан усилитель бегущей волны на четырёх полевых транзисторах. Здесь также рассчитывались усиление и уровни интермодуляционных составляющих (рис. 4.4). Настройка этого усилителя в режиме реального времени возможна и при большем числе транзисторов.
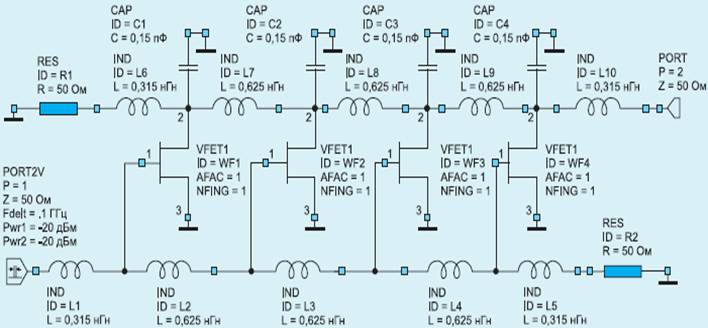 Рис. 4.3. Усилитель бегущей волны диапазона 1-12 ГГц на четырех полевых транзисторах. Стоковые конденсаторы выравнивают фазовую скорость в затворной и токовой цепях, что позволяет значительно расширить полосу пропускания усилителя
Рис. 4.3. Усилитель бегущей волны диапазона 1-12 ГГц на четырех полевых транзисторах. Стоковые конденсаторы выравнивают фазовую скорость в затворной и токовой цепях, что позволяет значительно расширить полосу пропускания усилителя
Метод анализа на основе рядов Вольтерра применим и к пассивным устройствам. На рис. 4.6 показан варакторный преселектор метрового диапазона. Рассчитанные характеристики изображены на рис. 4.5. Перестройка преселектора осуществляется изменением напряжения смещения на варакторных диодах. Следует отметить, что худший уровень интермодуляционных составляющих третьего порядка получается в области нижних частот, где варактор смещается в область большей нелинейности его кулонвольтной (Q/V) характеристики.

Рис. 4.4. Рассчитанные зависимости уровней мощности основной, второй и 2f2 - f1 гармоник сигнала на выходе СВЧ усилителя бегущей волны в диапазоне 1-12 ГГц при уровне входного сигнала -20 дБм
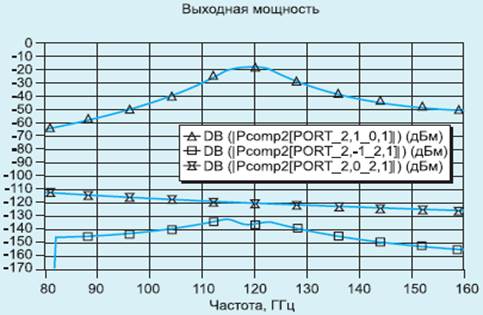
Рис. 4.5. Рассчитанные зависимости уровней мощности основной, второй и 2f2 - f1 гармоник сигнала на выходе варакторного перестраиваемого фильтра метрового диапазона при уровне входного сигнала -20 дБм
Также интересен тот факт, что зависимости уровней интермодуляционных составляющих являются плоскими по сравнению с передачей по основной гармонике. Если учесть, что данный преселектор используется для подавления внеполосных сигналов, то мощный мешающий сигнал может стать серьёзным источником искажений, возникающих в нём самом.
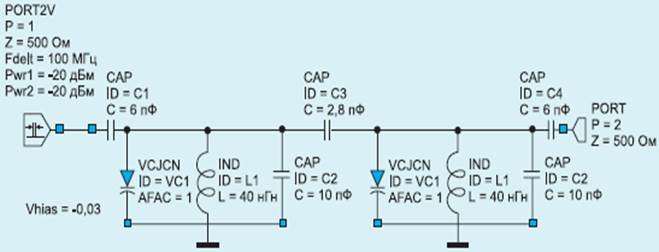
Рис. 4.6. Варакторный перестраиваемый фильтр метрового диапазона
5 .ПРИМЕР МОДЕЛИ УМНОЖИТЕЛЯ ЧАСТОТЫ
Рассмотрим упрощенную схему умножителя частоты на нелинейной емкости и определим структуру ее модели и выражения для передаточных функций.
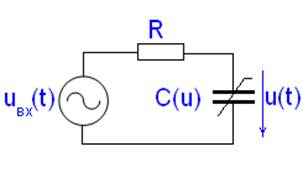
Рис. 5.1. Схема умножителя частоты
Схема рис. 5.1. описывается уравнением:
 , (5.1)
, (5.1)
здесь:
 . (5.2)
. (5.2)
Представим напряжение на конденсаторе в виде u = u1 + u2 + u3 + … и подставим в (5.1) и в (5.2):
 (5.3)
(5.3)
Приравняем члены первого порядка:
RC0 u1 + u1 = uвх . (5.4)
Линейное уравнение первой степени приводит, естественно, к передаточной функции апериодического звена:
 , (5.5)
, (5.5)
где: Т = RC0 .
Выберем члены второго порядка, учитывая, что справа в (5.3) они отсутствуют:
RC0 u2 + RC1 u1 u1 + u2 = 0 . (5.6)
Отсюда, применяя преобразование Лапласа:
(s1 + s2 ) RC0 U2 (s1 , s2 ) + RC1 U1 (s1 ) s2 U1 (s2 ) + U2 (s1 , s2 ) = 0 , (5.7)
что приводит к
 . (5.8)
. (5.8)
Поскольку U2
(s1
, s2
) = W2
(s1
, s2
) Uвх
(s1
) Uвх
(s2
), U1
(s) = W1
(s) Uвх
(s) и  (т.е. 2s2
W(s1
) W(s2
) = 2s1
W(s1
) W(s2
) = (s1
+s2
) W(s1
) W(s2
) ),
(т.е. 2s2
W(s1
) W(s2
) = 2s1
W(s1
) W(s2
) = (s1
+s2
) W(s1
) W(s2
) ),
То
W2 (s1 , s2 ) = (s1 + s2 ) W1 (s2 ) W2 (s2 ) G2 (s1 , s2 ) W1 (s1 + s2 ) , (5.9)
Где
G2 (s1 , s2 ) = -0,5 RC1 . (5.10)
Аналогично, преобразованием уравнения для членов третьего порядка, находится передаточная функция третьей степени. Получаем:
 , (5.11)
, (5.11)
где:
 . (5.12)
. (5.12)
Анализ полученных ядер позволяет построить структурно-алгоритмическую модель умножителя.
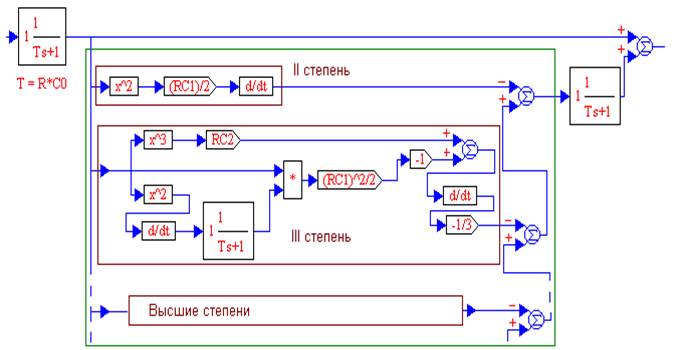
Рис. 5.2. Структура модели умножителя частоты
Как видно на рис. 5.2, ряд Вольтерра представляет инерционную нелинейность в виде отдельных операций возведения в степень, перемножения сигналов, умножения сигналов на коэффициент и инерционной операции, определяемой линейной частью системы, а также операции дифференцирования.
Рис. 5.3 . Выходной сигнал умножителя содержит вторую гармонику. Она получена преобразованием входного гармонического сигнала компонентой схемы с передаточной функцией второго порядка
ЗАКЛЮЧЕНИЕ
Детализация структуры нелинейной системы, описываемой уравнением (3.1) позволяет наглядно представить преобразование сигналов. Инерционная нелинейность моделируется отдельными безинерционными операциями возведения в степень, перемножения сигналов, умножения сигналов на коэффициент и инерционной операции, определяемой линейной частью системы, а также операциями дифференцирования.
Многомерные передаточные функции, описывающие поведение и свойства нелинейных инерционных систем и объектов являются естественным обобщением одномерных передаточных функций, эффективно применяемых для описания и анализа линейных систем. Можно ожидать, что развитие методов анализа многомерных передаточных функций нелинейных систем позволит сделать более эффективными анализ и синтез систем с мягкими нелинейностями, а также включить аппарат рядов Вольтерра в качестве одного из инструментов моделирующих программ. Анализ на основе рядов Вольтерра может применяться для схем, содержащих устройства со слабой нелинейностью. Современные программы моделирования электронных схем могут объединять такой метод с анализом шумов и линейных схем, что позволит настраивать даже достаточно сложные схемы практически в реальном масштабе времени. Благодаря своей совместимости с другими методами анализа, метод рядов Вольтерра должен стать неотъемлемой частью всех современных программ моделирования электронныхсхем.
СПИСОК ЛИТЕРАТУРНЫХ ИСТОЧНИКОВ
1. Volterra V. Theory of Functionals and Integral and Integro-Differential Equations. Dover Publications. New York, 1959.
2. Ван Трис Г.Л. Функциональные методы анализа нелинейного поведения систем фазовой автоподстройки частоты. IEEE (ТИИЭР), т.52, №8, 1964 г.
3. Parent R.B. Nonlinear differential equations and analytic system theory. SAIM, J.Appl.Math. vol. 18, January 1970.
4. Chen C.F., Chiu R.F. New theorems of association of variables in multiple dimensional Laplace Transform. INT. J. SYSTEM CSI., 1973, vol. 4, no. 4, p. 647 - 664.
5. Техническая кибернетика. Теория автоматического управления. Кн.3, часть 2. Теория нестационарных, нелинейных и самонастраивающихся систем автоматического регулирования. Ред. Солодовников В.В. – М: Машиностроение, 1969 г., с. 223 - 256.
6. Ku Y.H., Wolf A.A. Volterra-Wiener Functionals for the analysis of Nonlinear Systems. J. Franklin Inst. v. 281, n.1, 1966, p. 9 - 26.
7. Applied Wave Research, 1960 E. Grand Ave., El Segundo, California, 90245, USA.
8. J.W. Graham and L. Ehrman, Nonlinear System Modeling and Analysis with Applications to Com-munications Receivers, Rome Air Development Center Technical Report No. RADC-TR-73-178, 1973.
9. J.J. Busgang, L. Ehrman, and J.W. Graham, Analysis of Nonlinear Systems with Multiple Inputs, Proc. IEEE, vol. 62, p. 1088, 1974.
10. D.D. Weiner and J.F. Spina, Sinusoidal Analysis and Modeling of Weakly Nonlinear Circuits, Van Nostrand, New York, 1980.
ПРИЛОЖЕНИЯ
Приложение 1. Теоремы о последовательном соединении линейной и нелинейной (с ядром k-го порядка) систем
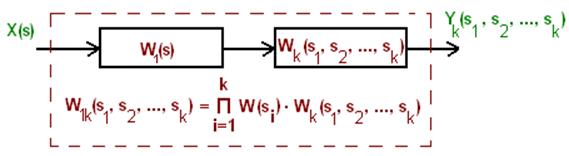
Рис. 1. Передаточная функция последовательного соединения систем первого и k-го порядков
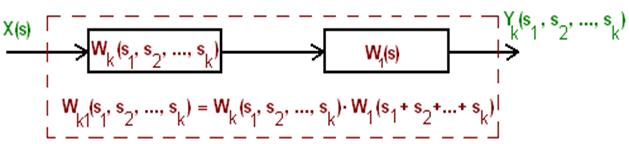
Рис. 2. Передаточная функция последовательного соединения систем k-го и первого порядков
Приложение 2. Об ассоциации переменных
Обратное многомерное преобразование Лапласа многомерного выходного сигнала нелинейной системы приводит к сигналу, являющемуся функцией n переменных t1 , t2 , …, tn . Но сигнал является функцией только одного времени. Поэтому после обратного преобразования названные переменные отождествляют (приравнивают). Известен [4] т.н. метод ассоциации переменных, который позволяет, учитывая равенство временных переменных, преобразовать функцию n переменных Y(s1 , s2 , …, sn ) к функции одной переменной Y(s), что упрощает переход к временной области