Математическая модель системы слежения РЛС
СОДЕРЖАНИЕ: Изучение основных принципов функционирования системы оптимального слежения. Моделирование привода антенны на основе экспериментальных данных, полученных при проведении исследований динамических характеристик и параметров привода РЛС в НПО Горизонт.Содержание
Содержание. 1
Введение. 3
1 Общая теория оптимального управления. 6
1.1 Допустимые управления. 6
1.2 Основные направления в теории оптимальных процессов. 11
1.2.1 Метод динамического программирования. 12
1.2.2 Принцип максимума. 13
1.3 Программное управление. 16
1.4 Постановка задачи и способы решения. 18
2 Система оптимального управления. 24
2.1 Математическое описание электромеханической системы.. 24
2.2 Идентификация авторегрессионно-регрессионной модели. 29
2.3 Формирование ограничений. 37
2.4 Формирование оптимальных траекторий. 42
2.5 Анализ решений. 50
2.6 Общая структура системы оптимального управления. 55
2.7 Полученные результаты.. 58
3 Практическая реализация. 63
3.1 Реализация оптимального управления в среде пакета matlab. 63
3.2 Выбор микроконтроллера. 64
4 Экономическое обоснование проекта. 66
4.1 Технико-экономическая характеристика. 66
4.2 Маркетинговая ориентация. 66
4.3 оценка научно-технической результативности и социальной эффективности НИР 68
4.4 Производственный план. 74
4.4.1 Расчёт затрат на разработку. 75
4.4.2 Затраты на создание опытного образца. 77
4.4.3 Затраты на эксплуатацию.. 79
4.4.4 Ценообразование. 79
Выводы.. 80
5 Безопасность и экологичность проекта. 81
5.1 Анализ опасных и вредных факторов. 82
5.2 Мероприятия по улучшению условий труда. 83
5.2.1 Помещения и их освещение. 83
5.2.2 Уровень шума и вибрация. 85
5.2.3 Параметры микроклимата. 86
5.2.4 Защита от электромагнитных и электростатических полей. 87
5.2.5 Электробезопасность. 90
5.2.6 Дисплейные терминалы и ПЭВМ в составе АРМ.. 91
5.2.7 Организация и оборудование рабочих мест с ВДТ и ПЭВМ.. 93
5.2.8 Требования к организации режима труда и отдыха при работе на АРМ.. 95
5.3 Устойчивость проекта к чрезвычайным ситуациям. 97
5.4 Экологичность проекта. 98
5.5 Выводы.. 99
Заключение. 100
Приложение. 101
Блок-схема файл-функции OPTIMUM_CONTR.. 101
Введение
Во многих областях техники и технологии приходится иметь дело со следующей задачей, которую можно трактовать как задачу «сопровождения цели». Причем, наблюдаемый процесс в некоторых случаях является детерминированным, т.е. полностью определенным, а в некоторых — не известным, но и в том и в другом случае в нем присутствует шум — случайная составляющая. Заданием для управляемого объекта служит движение другого объекта — задающего. Таким образом, задача слежения сводится к задаче перевода системы из начального состояния в наперед заданное состояние, которое определяется фазовым состоянием наблюдаемой системы.
В начальный момент времени t 0 объект находится в фазовом состоянии x 0 ; требуется выбрать такое управление u( t) , которое переведет объект в заранее заданное конечное фазовое состояние x 1 (отличное от x 0 ). При этом нередко бывает, что начальное состояние x 0 заранее неизвестно.
Такое управление часто осуществляется человеком (оператором), который следит за приборами и старается выбирать управление, поддерживающее объект в требуемом рабочем режиме.
Однако в современных условиях высокого развития техники оператор зачастую не может успешно справиться с этой задачей ввиду сложности поведения объекта, большой быстроты протекания процессов и т. п. Поэтому чрезвычайно важно создать такие приборы, которые сами, без участия человека, управляли бы работой объекта (например, в случае выхода объекта из рабочего состояния возвращали бы его в это рабочее состояние). Такие приборы сейчас очень распространены в технике, их изучением занимается теория автоматического управления.
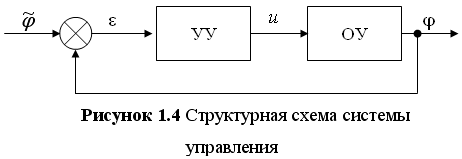
В общем случае на вход регулятора подаются фазовые координаты объекта. Регулятор конструируется так, что его выходная величина u , поданная на вход объекта, нужным образом управляет работой объекта (т. е., например, возвращает объект в рабочее состояние, если он почему-либо вышел из этого состояния).
Обычно требуется, чтобы переходный процесс (т. е. процесс перехода из начального фазового состояния x 0 в предписанное конечное состояние x 1 ) был в определенном смысле «наилучшим», например, чтобы время перехода было наименьшим или чтобы энергия, затраченная в течение переходного процесса, была минимальной и т. п. Такой «наилучший» переходный процесс называется оптимальным процессом.
Разумеется, желательно, чтобы регулятор не просто возвращал объект в рабочее состояние, а делал это наилучшим образом, например, в смысле быстродействия (т.е. возвращал объект в рабочее состояние за кратчайшее время). В связи с этим в теории автоматического управления рассматриваются весьма различные (по устройству и степени сложности) регуляторы. Рассмотрение регуляторов, которые применялись на практике и изучались в руководствах по автоматическому регулированию до возникновения теории оптимальных процессов, приводит к выводу, что уменьшение времени переходного процесса связано с усложнением конструкции регулятора; поэтому, усложняя конструкцию регулятора, можно лишь приближаться к «идеальному», «оптимальному» регулятору, который во всех случаях осуществляет переходный процесс за кратчайшее время.
Одной из важных заслуг теории оптимальных процессов является установление существования оптимальных регуляторов и создание математического аппарата, позволяющего рассчитывать такие регуляторы. Оптимальные регуляторы существенно отличаются от тех, которые до сих пор изучались в теории автоматического управления.
На данном уровне развития техники и технологии для такого рода управления в большинстве случаев используются стандартные регуляторы (например, ПИД-регуляторы). Во многих случаях их применение может быть оправдано и их работа удовлетворяет поставленным целям управления, но существуют ситуации, в которых применение таких регуляторов не дает необходимого результата. Использование ПИД-регуляторов может оказаться нецелесообразным в случае ограничений на управление. В такой ситуации, система в целом оказывается существенно нелинейной и классические приемы управления в этом случае не приемлемы.
В данной работе рассматривается система, состоящая из двух электроприводов, один из которых является ведущим, а другой — ведомым. Ведомый двигатель должен двигаться синхронно с ведущим. Система должна отрабатывать заданную траекторию с необходимой точностью и максимальным быстродействием.
1 Общая теория оптимального управления
1.1 Допустимые управления
Наиболее перспективным решением экстремальных задач является их решение на основе теории принципа максимума Понтрягина. В данной работе ставилась задача оптимизации по времени, для чего и были использованы методы оптимального управления, предложенные Л.С. Понтрягиным, В.Г. Болтянским, Р.В. Гамкрелидзе. [1]
Задача оптимального быстродействия заключается в отыскании такого управления u( t) , для которого фазовая траектория x( t) проходит через точку x1 и переход из х0 в х1 осуществляется за кратчайшее время. Такое управление u( t) называется оптимальным управлением (в смысле быстродействия) ; точно так же соответствующую траекторию x( t) , по которой фазовая точка за кратчайшее время переходит из состояния x0 в состояние x1 называется оптимальной траекторией .
Обычно управляющие параметры u1 ,..., ur не могут принимать совершенно произвольные значения, а подчинены некоторым ограничениям. Это обусловлено техническими характеристиками реальных объектов управления, а также конструкцией регулирующих устройств.
Например, для двигателя постоянного тока (ДПТ), одним из управляющих параметров служит напряжение якоря; однако именно в силу конструктивных особенностей ДПТ этот параметр подчинен ограничениям указанного типа. Так, значение этого параметра не может принимать сколь угодно большое значение.
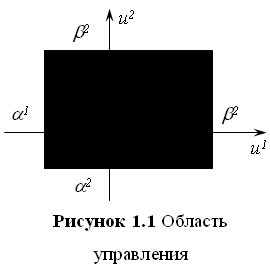
Для объекта, содержащего r управляющих параметров u1 , u2 , ..., ur , в приложениях часто встречается случай, когда эти параметры могут произвольно меняться в следующих пределах:
![]()
Т. е. каждая из величин u1 , u2 , ..., ur представляет собой отдельный управляющий параметр, область изменения которого не зависит от значений остальных управляющих параметров и задается неравенствами
![]() (1.1)
(1.1)
Заметим, что при r
= 2 точки ![]() , координаты которых подчинены неравенствам (1.1), заполняют прямоугольник (рисунок 1.1); при r
= 3 неравенства (1.1) определяют в пространстве переменных u1
, u2
, u3
прямоугольный параллелепипед.
, координаты которых подчинены неравенствам (1.1), заполняют прямоугольник (рисунок 1.1); при r
= 3 неравенства (1.1) определяют в пространстве переменных u1
, u2
, u3
прямоугольный параллелепипед.
В общем случае будем считать, что в соответствии с конструкцией объекта и условиями его эксплуатации задано в пространстве переменных u1
, ..., ur
некоторое множество U
и управляющие параметры u1
, u2
, ..., ur
должны в каждый момент времени принимать лишь такие значения, чтобы точка ![]() принадлежала множеству U
. Т. е. разрешается рассматривать лишь такие управления u(
t)
, что
принадлежала множеству U
. Т. е. разрешается рассматривать лишь такие управления u(
t)
, что ![]() для любого t
. Множество U
называется областью управления
.
для любого t
. Множество U
называется областью управления
.
Область управления U , в общем случае, может быть не только параллелепипедом, но может иметь более или менее геометрически сложный характер, так как благодаря конструкции объекта между управляющими параметрами могут существовать некоторые связи, выражаемые некоторыми уравнениями или неравенствами. Указанные области управления должны входить в математическое описание объекта.
Для технических задач важен случай замкнутого множества U
, т.е. случай, когда точка ![]() может находиться не только внутри множества, но и на его границе. Т.е. для «рулей» допустимы и их крайние положения.
может находиться не только внутри множества, но и на его границе. Т.е. для «рулей» допустимы и их крайние положения.
Для полного осмысления данного вопроса необходимо сделать еще одно, очень важное, предположение о характере управлений. Возможны несколько случаев представления управляющих воздействий. А именно, в одном случае, когда это позволяет точность представления, можно предполагать, что «рули», положения которых характеризуются управляющими параметрами u1 , u2 , ..., ur , безынерционны, так что есть возможность, если нужно, мгновенно переключать эти «рули» из одного положения в другое, т. е. менять скачком значения управляющих параметров u1 , u2 , ..., ur в пределах области управления.
В другом случае, когда точность расчетов не допускает таких приближений нужно предполагать, что управляющие воздействия не могут меняться скачкообразно на сколь угодно большую величину, т.е. существует ограничение не только на значение управляющего параметра, но и на скорость изменения этого параметра. В этом случае достаточно написать ![]() , где
, где ![]() — скорость изменения управляющего параметра, и принять за управляющий параметр величину
— скорость изменения управляющего параметра, и принять за управляющий параметр величину ![]() . Т. о. существует ограничение вида
. Т. о. существует ограничение вида
 (1.2)
(1.2)
что несколько осложняет поиск оптимального управления.
Всякий реальный процесс обладает некоторой «инерционностью», но во всяком реальном управляемом объекте всегда можно найти такие управляющие параметры, которые, в пределах заданной точности, можно считать безынерционными.
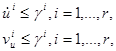
В соответствии с этим будут рассматриваться не только непрерывные, но и кусочно-непрерывные управления u( t) . Класс кусочно-непрерывных управлений хорош тем, что, во-первых, позволяет получить точное математическое решение оптимальной задачи для широкого класса примеров, а во-вторых, наиболее интересен и удобен для технической реализации.
Необходимо уточнить, что функция ![]() со значениями в области управления U
называется кусочно-непрерывной,
если она состоит из конечного числа непрерывных кусков (рисунок 1.2), т.е. непрерывна для всех рассматриваемых t,
за исключением лишь конечного числа моментов времени, где функция u(
t)
может терпеть разрывы первого рода; последнее означает, что в каждой точке разрыва t предполагается существование конечных пределов слева и справа:
со значениями в области управления U
называется кусочно-непрерывной,
если она состоит из конечного числа непрерывных кусков (рисунок 1.2), т.е. непрерывна для всех рассматриваемых t,
за исключением лишь конечного числа моментов времени, где функция u(
t)
может терпеть разрывы первого рода; последнее означает, что в каждой точке разрыва t предполагается существование конечных пределов слева и справа:
![]()
Значение кусочно-непрерывного управления u( t) в точке разрыва не играет сколько-нибудь существенной роли. Однако для определенности будет удобно предполагать, что управление u( t) в точках разрыва непрерывно справа, т. е. что в каждой точке разрыва t значение управления u( t) равно пределу справа:
![]()
Кроме того, предполагается, что каждое рассматриваемое управление u(
t)
непрерывно в концах отрезка ![]() на котором оно задано, т. е. что все его точки разрыва, если они есть, расположены на интервале
на котором оно задано, т. е. что все его точки разрыва, если они есть, расположены на интервале ![]() .
.

Допустимым управлением
называют всякую кусочно-непрерывную функцию ![]() со значениями в области управления U,
непрерывную справа в точках разрыва и непрерывную в концах отрезка
со значениями в области управления U,
непрерывную справа в точках разрыва и непрерывную в концах отрезка ![]() на котором она задана.
на котором она задана.
Оптимальные управления оказываются, в большинстве случаев, разрывными (т.е. содержащие скачки и переключения). Если разрывная функция, график которой изображен на рисунке 1.3 сплошной линией, представляет собой оптимальное управление, то, «сгладив» эту функцию (пунктир на рисунке 1.3), будет получена близкая к ней непрерывная функция. Но какая бы «близкая» к оптимальному управлению непрерывная функция ни была, всегда можно выбрать «сглаживающий» кусок еще более крутым и получить непрерывную функцию, еще более близкую к оптимальному управлению. Таким образом, в классе непрерывных функций просто не будет наилучшего, оптимального управления, а предельным случаем является кусочно-непрерывная функция, которая и является оптимальным управлением.
1.2 Основные направления в теории оптимальных процессов
Теория оптимальных процессов базируется на методе динамического программирования, разработанного Р. Беллманом, а также на принципе максимума Понтрягина. Для линейных систем принцип максимума был доказан Р.В. Гамкрелидзе. Кроме того, ему принадлежит теорема о конечности числа переключений. Доказательство принципа максимума для нелинейных систем принадлежит В.Г. Болтянскому.
Далее кратко рассмотрим общие принципы метода динамического программирования и принципа максимума.
1.2.1 Метод динамического программирования
Для получения уравнения Беллмана и формулировки теоремы, являющейся сущностью метода динамического программирования автором данной теории были выдвинуты следующие гипотезы.
Гипотеза 1.1 . Какова бы ни была отличная от x1 точка x фазового пространства, существует оптимальный (в смысле быстродействия) процесс перехода из точки x в точку x1 .
Время, в течение которого осуществляется оптимальный переход из точки x в точку x1 , обозначим через Т(х) . И пусть
w( x) = — T( x).
Гипотеза 1.2. Функция w( x) непрерывна и всюду, кроме точки x1 , имеет непрерывные частные производные
![]()
На основе этих гипотез была сформулирована и доказана теорема 1.1.
Теорема 1.1.
Если для управляемого объекта, описываемого уравнением ![]() , и предписанного конечного состояния x1
выполнены гипотезы 1 и 2, то имеют место соотношения (1.3) и (1.4) (оптимальность понимается в смысле быстродействия).
, и предписанного конечного состояния x1
выполнены гипотезы 1 и 2, то имеют место соотношения (1.3) и (1.4) (оптимальность понимается в смысле быстродействия).
![]() для всех точек x
x
1
и u,
для всех точек x
x
1
и u,
 (1.3)
(1.3)
![]()
для любого оптимального процесса ( u( t), x( t)). (1.4)
Эта теорема и составляет сущность метода динамического программирования.
Метод динамического программирования (1.3), (1.4) содержит некоторую информацию об оптимальных процессах и потому может быть использован для их разыскания. Однако он имеет ряд неудобств. Во-первых, применение этого метода требует нахождения не только оптимальных управлений, но и функции w( x) так как эта функция входит в соотношения (1.3), (1.4). Во-вторых, уравнение Беллмана представляет собой уравнение в частных производных относительно функции w . Указанные обстоятельства сильно затрудняют возможность пользования методом динамического программирования для отыскания оптимальных процессов в конкретных примерах. Но самым главным недостатком этого метода является предположение о выполнении гипотез 1.1 и 1.2. Ведь оптимальные управления и функция w заранее неизвестны, так что гипотезы 1.1 и 1.2 содержат предположение о неизвестной функции, и проверить выполнение этих гипотез по уравнениям движения объекта невозможно.
Далее кратко излагается сущность принципа максимума, который является значительно более удобным средством для отыскания оптимальных процессов, чем метод динамического программирования.
1.2.2 Принцип максимума
Гипотеза 1.3.
Функция w(
x)
имеет при x
x
1
вторые непрерывные производные ![]() , а функции
, а функции ![]() — первые непрерывные производные
— первые непрерывные производные ![]() .
.
Теорема 1.2. Предположим, что для рассматриваемого управляемого объекта, описываемого уравнением
![]() (1.5)
(1.5)
И предписанного конечного состояния x1
выполнены гипотезы 1.1, 1.2 и 1.3. Пусть ![]() , — некоторый процесс, переводящий объект из начального состояния x
0
в состояние x
1
. Введем в рассмотрение функцию H
, зависящую от переменных
, — некоторый процесс, переводящий объект из начального состояния x
0
в состояние x
1
. Введем в рассмотрение функцию H
, зависящую от переменных ![]() и некоторых вспомогательных переменных
и некоторых вспомогательных переменных ![]()
![]() ........................................................................ (1.6)
........................................................................ (1.6)
С помощью этой функции H запишем следующую систему дифференциальных уравнений для вспомогательных переменных:
![]() (1.7)
(1.7)
Тогда, если процесс ![]() является оптимальным, то существует такое нетривиальное решение
является оптимальным, то существует такое нетривиальное решение ![]() , системы (1.7), что для любого момента t
,
, системы (1.7), что для любого момента t
, ![]() , выполнено условие максимума
, выполнено условие максимума
![]() (1.8)
(1.8)
и условие
![]()
Эта теорема значительно удобнее для отыскания оптимальных процессов, чем метод динамического программирования. Однако в приведенной здесь форме принцип максимума страдает тем же недостатком, что и метод динамического программирования: он выведен в предположении дифференцируемости (и даже двукратной) функции w( x) , а эта функция, как уже отмечалось, в действительности не является всюду дифференцируемой.
Однако принцип максимума доставляет достаточную информацию для решения поставленной задаче оптимального управления.
Благодаря работам Р.В. Гамкрелидзе, принцип максимума был доказан для линейных систем. Им были доказаны теоремы существования, единственности и теорема о числе переключений.
В данном случае функция Н принимает вид
![]() (1.9)
(1.9)
Выражение (1.7) в векторной форме записывается в виде
![]() (1.10)
(1.10)
а соотношение (1.8) принимает в данном случае вид
![]() (1.11)
(1.11)
Теорема 1.3 (теорема существования). Область управляемости является выпуклым открытым множеством фазового пространства Х ; для любой точки х 0 , принадлежащей области управляемости, существует оптимальное управление, переводящее точку х 0 в начало координат.
Примечание: Множество G называется открытым, если для каждой его точки можно найти шар с центром в этой точке, целиком принадлежащий множеству G , иначе говоря, множество G открыто, если к нему не причисляется ни одна точка его границы.
Областью управляемости объекта называется множество всех тех точек х 0 фазового пространства X , из которых возможно при помощи какого-либо допустимого управления попасть в начало координат. Само начало координат тоже причисляется к области управляемости.
Теорема 1.4 (теорема о числе переключений). Для каждого нетривиального решения y(t ) уравнения (1.10) соотношение (1.11) однозначно определяет допустимое управление u (t ); при этом оказывается, что функция u (t ) кусочно-постоянна и ее значениями являются лишь вершины многогранника U .
Таким образом, функция u( t) кусочно-постоянна, принимает значения в вершинах многогранника U и определена однозначно. Каждую точку разрыва оптимального управления называют точкой переключения.
В общем случае число переключений хотя и конечно, но может быть произвольным. Однако существует один важный для приложений случай, когда число переключений допускает точную оценку. Этот случай рассматривается в теореме принадлежащей А.А. Фельдбауму. В этой теореме говорится (упрощенно), что каждая из функций ![]() кусочно-постоянна и имеет не более n
—1 переключений (т.е. не более n
интервалов постоянства), где n
— порядок системы.
кусочно-постоянна и имеет не более n
—1 переключений (т.е. не более n
интервалов постоянства), где n
— порядок системы.
Таким образом, принцип максимума является наиболее удобным для решения задачи об оптимальном быстродействии.
1.3 Программное управление
Сегодня оборудование с программным управлением распространено весьма широко, начиная от компаний, входящих в TOP 500 Fortune в больших промышленных зонах, и заканчивая малыми предприятиями частного бизнеса. Действительно весьма трудно найти ту область машиностроения, где еще не используются уникальные возможности этого оборудования. Поэтому каждый специалист в области машиностроения должен хорошо представлять то, что дает производству применение этого весьма интеллектуального оборудования.
Программное управление технологическим оборудованием и процессами охватывает управление движением машин, механизмов, транспортных средств и изменением физических и химических параметров технологического процесса.
Программное управление — это управление режимом работы или состоянием объекта по заранее заданной программе. При автоматическом программном управлении технологическим оборудованием, соответствующая алгоритму программа записывается в память управляющего устройства с последующим автоматическим считыванием и преобразованием в управляющие сигналы.
Программное управление может быть реализовано на различных классах вычислительных машин, начиная от микроЭВМ и заканчивая мощными вычислительными системами. Каждый из этих классов накладывает на алгоритмы некоторые ограничения, которые необходимо учитывать при разработке алгоритмического обеспечения.
Разрабатываемый алгоритм ориентируется для использования в микроконтроллерах, что накладывает особые ограничения на полученный алгоритм.
Необходимо отметить, что микроконтроллеры выполняют операции для дискретного времени и дискретных величин. Вычисления осуществляются с конечной точностью и за конечное время.
Следует также учитывать тот факт, что микроконтроллеры не вычисляют точных значений интегралов и производных, но могут оценивать их значения в конечных разностях, т.е. с помощью численных методов.
Еще одним из важнейших условий, необходимым для успешной практической реализации, является необходимость учитывать отношение стоимости и мощности микроконтроллеров, которые будут использоваться в производстве.
Таким образом, после определения алгоритма оптимального управления для его реализации на реальном микроконтроллере необходимо выполнить оптимизацию по количеству операций, необходимых для проводимых вычислений, а также выполнить оценку точности вычислений. Оценка точности вычислений налагает ограничения на разрядность используемых микроконтроллеров, что в свою очередь сказывается на стоимости устройства в целом. Поэтому, изначально, алгоритм должен ориентироваться на элементарные операции сложения и вычитания, а также логические операции при переключении режимов.
При наличии сложных функциональных зависимостей, необходимо выполнить оценку их табулируемости для обеспечения высокого быстродействия работы алгоритма.
1.4 Постановка задачи и способы решения
В производстве всегда существовала проблема, сущность которой заключалась в переводе системы из некоторого начального фазового состояния в некоторое заранее заданное конечное состояние. Причем точность перехода должна быть максимальной, а время — минимальным.
В настоящее время эту проблему решает теория автоматического управления на базе стандартных регуляторов. Примером может служить широко распространенный ПИД-регулятор, на базе которого решается большой круг задач. Во многих случаях результаты, получаемы при использовании этих устройств, удовлетворяют потребностям управления. Там где не требуется очень высокое быстродействие или ограничения, накладываемые конструктивными особенностями и характеристиками реальных объектов на вид и характер переходного процесса не являются очень строгими возможно применять данные устройства.
Но с течением времени, в связи с развитием науки и техники инструменты производства все более усложняются, повышаются и требования к качеству управления. Под качеством понимается не только точность, но и быстродействие. Также возникают ситуации, в которых управление выработанное стандартными устройствами не может быть реализовано в полной мере из-за тех или иных технических характеристик объектов управления. Для удовлетворения современным запросам управления промышленные регуляторы совершенствуются и усложняются, что дает некоторый положительный результат, но приводит также и к нежелательным последствиям. А именно — с усложнением конструкции уменьшается надежность данного устройства и растет его стоимость, что, в свою очередь, тормозит внедрение его в производство.
Примером не адекватной работы устройств на базе стандартных регуляторов могут служить системы имеющие ограничения на управление. В такой ситуации, система в целом оказывается существенно нелинейной и классические приемы управления в этом случае не приемлемы и для достижения положительных результатов необходимо применять принципиально новые теории и законы, на базе которых можно получить такой вид регуляторов, который удовлетворял бы всем поставленным условиям и требованиям.
Целью данной работы является создание математической модели устройства, позволяющего адекватно управлять объектом при наличии ограничений на управление, причем главным условием ставится минимизация времени переходного процесса системы. Предполагается, что наиболее успешным и перспективным решением такого рода задач будет решение на базе теории принципа максимума Понтрягина.
В данной работе рассматривается радиолокационная установка, которая представляет собой совокупность как минимум двух синхронно вращающихся антенн, приводимых в движение электроприводами. В данной системе существует ведущий электропривод, который задает параметры вращения, и ведомый, который должен в точности повторять траекторию движения ведущего.
Предполагается, что тип двигателей, приводящих в движение эти антенны, не имеет для данной работы особого смысла. Сделаем следующее допущения: в данной системе есть возможность измерять в каждые заданные моменты времени положение ведущей антенны, т.е. есть возможность получать информацию о траектории ведущей антенны. Таким образом в связи со сделанными допущениями, система представляет собой совокупность двух электроприводов.
Ставится следующая задача: ведомый двигатель должен двигаться синхронно с ведущим. Система должна отрабатывать заданную траекторию с необходимой точностью и максимальным быстродействием.
В начальный момент времени оба двигателя могут быть рассинхронизированы. Конкретизируем задачу: необходимо за минимальный промежуток времени вывести ведомый двигатель на траекторию ведущего, причем в конце переходного процесса должны совпадать не только угол j, но также и скорость w, т. е., другими словами, ведомый двигатель попав на нужную траекторию, должен находиться на ней. Главным условием ставится минимизация времени переходного процесса. Таким образом ставится задача оптимально быстродействия.
Достижение указанной цели обусловлено решением следующих задач:
1. Построение оптимального программного управления системы слежения РЛС;
1.1. Построение оптимизационного функционала;
1.2. Вычисление точек переключения;
1.3. Нахождение оптимальных траекторий;
2. Моделирование полученной системы управления;
3. Проверка сделанных гипотез.
Предполагается, что процесс управления будет иметь циклический характер, так как в результате одного шага управления координаты ведущего и ведомого двигателей будут совпадать с некоторой погрешностью, которая в свою очередь будет являться начальными данными для следующего шага управления и т.д.
Запишем поставленную цель управления в виде:
 (1.12)
(1.12)
где — J,
T
— целевые функционалы по ошибке и времени; ![]() — выходные координаты ведомого двигателя;
— выходные координаты ведомого двигателя; ![]() — выходные координаты ведущего двигателя.
— выходные координаты ведущего двигателя.
Выходные координаты ведущего двигателя в данном случае являются заданием.
Как было сказано выше, в реальных системах всегда существуют ограничения на управление, обусловленные техническими особенностями реальных объектов. В данном случае — это ограничение на напряжение якоря двигателя. Эти условия представляют собой ограничения на величину и на скорость изменения управляющего параметра U . Таким образом эти ограничения выделяют в пространстве управлений некоторое подпространство, называемое, как было сказано выше, областью управления. Область управления представляет собой r -мерный параллелепипед.
В теории принципа максимума было доказано, что управление будет оптимальным в случае движения по граням параллелепипеда области управления. В нашем случае областью управления является прямоугольник, так как множество управлений представляет собой пространство R 2 . Управление будет представлять собой кусочно-непрерывную функцию.
Движение системы в фазовом пространстве должно проходить по оптимальным траекториям. Оптимальной траектория будет лишь в случае приложения оптимального управления, характер которого описан выше.
Для отыскания оптимального перехода в смысле быстродействия необходимо получить множество оптимальных траекторий. Это множество является общим решением системы уравнений, описывающих объект, при приложенном оптимальном управлении. Вид этих кривых будет описан ниже в главе 2.
Будем решать задачу в базисе ошибок.
Задавшись выражением (1.13)
 (1.13)
(1.13)
где ![]() — выходные координаты ведомой системы,
— выходные координаты ведомой системы, ![]() — выходные координаты ведущей системы, являющиеся заданием,
— выходные координаты ведущей системы, являющиеся заданием, ![]() — ошибка и скорость ошибки, можно сформулировать задачу в базисе ошибки: за минимальный промежуток времени вывести ошибку e
и ее производную
— ошибка и скорость ошибки, можно сформулировать задачу в базисе ошибки: за минимальный промежуток времени вывести ошибку e
и ее производную ![]() в нуль.
в нуль.
Так как оптимальное управление имеет вид кусочно-непрерывной функции имеющей точки переключения, то движение системы в базисе ошибок будет проходить по кривым, имеющим конечное число точек переключения (а соответственно и интервалов постоянства), соответствующим точкам переключения управляющего параметра. Таким образом возникает проблема нахождения моментов времени, в которые необходимо изменить значение (переключить) управляющего параметра.
Таким образом общая задача сводится к нахождению области управления, нахождению вида оптимальных траекторий и вычисление моментов времени точек переключения управляющего параметра.
В результате решения общей задачи, сформулированной выше, должен быть получен общий алгоритм функционирования системы оптимального управления, который необходимо оптимизировать для использования в микроконтроллерах.
2 Система оптимального управления
2.1 Математическое описание электромеханической системы
В данной работе рассматривается радиолокационная установка, которая представляет собой совокупность как минимум двух синхронно вращающихся антенн. В данной системе одна из антенн является ведущей — она задает параметры движения, другая — ведомая, которая должна в точности повторять траекторию движения ведущей.
Каждая из антенн представляет собой сложную электромеханическую систему, представляющую собой совокупность таких составных частей как электропривод, редуктор и собственно принимающая антенна. Основным источником механической энергии является электропривод. Редуктор служит для преобразования угловых скоростей и соответственно вращающих моментов, выдаваемых двигателем. Редукторы могут быть зубчатые (в том числе червячные) или гидравлические.

Напомним, что в разделе 1.5 были сделаны следующие допущения: в данной системе есть возможность измерять в каждые заданные моменты времени положение ведущей антенны, т.е. есть возможность получать информацию о траектории ведущей антенны; тип двигателя, приводящего в движение антенны является не существенным для данной работы.
Применяемые в настоящее время регулируемые и следящие электроприводы (ЭП) построены, в основном, с применением принципов подчиненного регулирования координат. В качестве координат выступают ток якоря двигателя, его скорость вращения и угол поворота вала двигателя (перемещение исполнительного органа рабочей машины).
Для решения поставленных в разделе 1.5 задач нет необходимости приводить полное точное математическое описание данной электромеханической системы. Так как нашей целью является не описание процессов, протекающих внутри этой системы, а регулирование поведения данной системы в целом. К тому же, как было видно из описанного выше, современные электромеханические системы имеют сложную структуру и их описание будет громоздким, что не дает возможности применения этого описания в однокристальных ЭВМ, на которые ориентируется данный разрабатываемый метод.
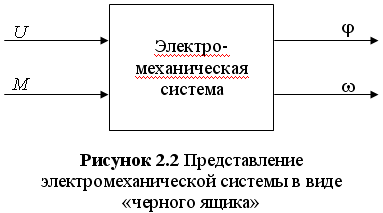
В связи с этим предлагается рассматривать данную электромеханическую систему как один неразделимый блок, не останавливаясь на конкретных процессах и взаимосвязях имеющих место быть, т.е. рассматривать данную систему как, так называемый, «черный ящик». На рисунке 2.2 приведена условное изображение этой системы в виде «черного ящика». Известно, что выходными координатами системы являются угол j и скорость w поворота исполнительного органа рабочей машины (вала двигателя). Входной координатой является момент М , характеризующий тормозящий момент на валу двигателя, развиваемый рабочей установкой; момент сил трения в подшипниках, о воздух, на коллекторе электрической машины и в зубчатых передачах редуктора; тормозящий момент, вызываемый потерями на гистерезис и вихревые токи в сердечнике якоря. Управляющим параметром, в данном случае, является напряжение U на якоре электродвигателя.
Объекты и системы управления состоят из элементов, имеющих различную природу. Для анализа их взаимодействия удобно перейти к единообразному, стандартному описанию.
Так как разрабатываемый метод ориентируется на использование в однокристальных ЭВМ, то описание системы необходимо производить в дискретном виде. Для этого в описании динамической системы вместо дифференциальных уравнений предложено использовать уравнения в конечных разностях или разностные уравнения.
Для математического описания данной системы было предложено использовать разностное уравнение специального вида, которое носит название авторегрессионно-регрессионной модели объекта (АРРМ).
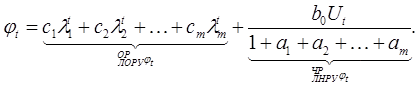
Общий вид авторегрессионно-регрессионной модели порядка ( N, L) представлен ниже:
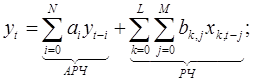 (2.1)
(2.1)
где АРЧ — авторегрессионная часть, РЧ — регрессионная часть; N
и L
— целые числа, определяющие порядок АРРМ (![]() ); N
— порядок авторегрессионной, а L
— порядок регрессионной части модели; ai
и bi
— параметры АРРМ. Вектор параметров определяется на этапе идентификации модели.
); N
— порядок авторегрессионной, а L
— порядок регрессионной части модели; ai
и bi
— параметры АРРМ. Вектор параметров определяется на этапе идентификации модели.
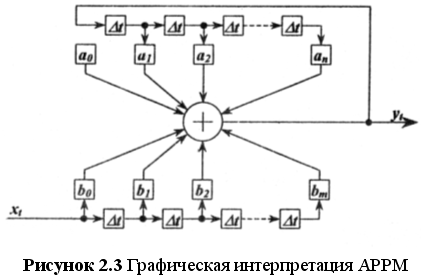
Авторегрессионная часть является выходом модели, а регрессионная часть — входом, т.е. yt является выходным процессом, а xt — входным. В частном случае, когда N = 0, модель не имеет входа и называется авторегрессионной моделью, если L = 0, то будет получена регрессионная модель. Графическая интерпретация АРРМ приведена на рисунке 2.3. В отличие от дифференциальных уравнений, авторегрессионно-регрессионные модели могут описывать как непрерывные, так и дискретные по своей природе объекты.
В нашем случае входными процессами являются момент М и напряжение на якоре двигателя U , которое также является управляющим воздействием. Выходным параметром является угол поворота оси антенны. Таким образом вид авторегрессионно-регрессионной модели в нашем случае будет иметь вид:
 (2.2)
(2.2)
или если принять в качестве выходного параметра скорость w поворота вала, то выражение (2.2) примет вид:
 (2.3)
(2.3)
где ![]() — параметры модели, (N,
M+
K
) — порядок модели.
— параметры модели, (N,
M+
K
) — порядок модели.
В режиме холостого хода выражения (2.2) и (2.3) будут иметь вид:
 (2.4)
(2.4)
 (2.5)
(2.5)
Параметры этих моделей не имеют прямого физического смысла и зависят от выбора шага квантования по времени. Порядок модели как и ее параметры находятся в процессе идентификации.
По своему физическому смыслу модели (2.3) и (2.5) являются устойчивыми, а (2.2) и (2.4) — неустойчивыми. Модели (2.2) и (2.4) являются неустойчивыми, так как выходная координата (угол поворота) постоянно увеличивается при постоянном входном воздействии (напряжении на якоре), а скорость вращения стремится к некоторому определенному значению.
Авторегрессионно-регрессионная модель является устойчивой, если устойчивой является соответствующая ей авторегрессионная модель. Выполнить анализ устойчивости можно после идентификации параметров модели.
2.2 Идентификация авторегрессионно-регрессионной модели
Идентификация динамической системы заключается в отыскании математических моделей, поведение которых подобно поведению самой системы (объекта). Модель объекта необходима для синтеза законов управления, так как управление определяется в результате анализа прогноза поведения объекта.
При использовании в качестве модели объекта АРРМ предполагается, что объект является линейным (хотя бы для рассматриваемых режимов работы) или допускает линейное описание. Реальные же объекты являются нелинейными.
Для идентификации необходимо выбрать порядок модели (ее вид), а затем идентифицировать ее параметры (коэффициенты). Вид модели определяется экспериментально, из заданного списка возможных моделей. Для каждой из них идентифицируются параметры, и оценивается ее точность. На основании анализа точности описания и сложности модели делается вывод о ее пригодности. Таким образом, в общем случае, процесс выбора модели и идентификации параметров является циклическим процессом.
Для описания данной электромеханической системы будем использовать АРРМ, имеющую вид (2.2).
На начальном этапе необходимо выбрать порядок авторегрессионно-регрессионной модели. Для достижения этой цели проводился эксперимент, в котором циклически проводился подбор порядка модели с определением точности полученной на каждом шаге модели, исходя из реальных экспериментально полученных данных. Поиск подходящего порядка модели проводился в диапазоне p = 0..20.
В результате была найдена модель, удовлетворяющая требованиям точности, порядок которой составляет (3, 3). Общий вид АРРМ объекта (электромеханической системы) представлен ниже:
![]() (2.6)
(2.6)
Если за основу взять выражение (2.3), то конечная АРРМ будет иметь вид:
![]() (2.7)
(2.7)
В режиме холостого хода, когда момент М
на валу двигателя равен нулю (т.е. ![]() ), выражения (2.6) и (2.7) примут вид:
), выражения (2.6) и (2.7) примут вид:
![]() (2.8)
(2.8)
![]() (2.9)
(2.9)
Однако перед окончательным выбором вида математической модели, следует упомянуть следующий факт: особенностью рассматриваемой системы является то, что тормозящий момент на валу электропривода имеет константный характер так как обусловлен, как говорилось в разделе 2.1, силами трения, а также, так называемой, ветровой нагрузкой, которая симметрично действует и на разгон и на торможение. Таким образом тормозящий момент существует и равен некоторому константному значению, а следовательно он будет учитываться при идентификации системы автоматически.
Таким образом, первый этап идентификации, на котором был определен порядок модели, выполнен. Далее будут использоваться выражения (2.8) и (2.9).
Вторым этапом идентификации является нахождение численных значений параметров авторегрессионно-регрессионной модели: ![]() , которые по своему смыслу являются весовыми коэффициентами.
, которые по своему смыслу являются весовыми коэффициентами.
Нахождение численных значений параметров модели будем производить с помощью метода наименьших квадратов (МНК). В результате применения метода МНК будет получен вектор оценочных значений параметров модели. Суть МНК заключается в минимизации суммы квадратов ошибок исходных уравнений (2.8) для данного набора фазовых координат динамической системы.
Для идентификации параметров необходимо наблюдать входные и выходные фазовые координаты системы. Для нашей системы, как упоминалось выше, входной координатой является Ut , выходной координатой — jt . Данные наблюдений заносятся в таблицу (таблица 2.1):
Таблица 2.1 Исходные данные для идентификации
|
|
|||||
| t |
j t |
j t-1 |
j t-2 |
j t-3 |
Ut |
| 1 |
j 0 |
— |
— |
— |
U0 |
| 2 |
j 1 |
j 0 |
— |
— |
U1 |
| 3 |
j 2 |
j 1 |
j 0 |
— |
U2 |
| 4 |
j 3 |
j 2 |
j 1 |
j 0 |
U3 |
| 5 |
j 4 |
j 3 |
j 2 |
j 1 |
U4 |
| … |
… |
… |
… |
… |
… |
| t |
j t |
j t –1 |
j t –2 |
j t –3 |
U t |
Далее из таблицы 2.1 формируются матрицы X и Y , которые имеют вид:
Конечной расчетной формулой МНК является выражение (2.10):
![]() (2.10)
(2.10)
где ![]() — вектор-столбец оценочных параметров модели (2.8), X
и Y
— указанные выше матрицы.
— вектор-столбец оценочных параметров модели (2.8), X
и Y
— указанные выше матрицы.
Таким образом, в результате вычислений получается вектор-столбец оценочных параметров модели (2.8) имеющий вид:
 (2.11)
(2.11)
Или
![]()
Для идентификации модели электромеханической системы использовались данные, экспериментально полученные при проведении исследований динамических характеристик и параметров привода РЛС в ООО НПО «Горизонт» [3]. Значения для каждой фазовой координаты представляют собой векторы, полученные путем измерения данной координаты в конкретные промежутки времени, определяемые временем квантования, которое составило ![]() секунды.
секунды.
В качестве исходных данных выступают скорость поворота исполняемого органа привода и управляющее воздействие. В процессе проведения эксперимента были получены несколько траекторий движения системы, а именно девять, после чего было проведено усреднение результатов. Так как измерения проводились с малым временем квантования, то для уменьшения громоздкости расчетов была проведена интерполяция исходных данных с временем квантования ![]() секунды. Экспериментальные данные представлены на рисунках 2.4 — 2.7 и представляют собой зависимость значений фазовых координат от времени.
секунды. Экспериментальные данные представлены на рисунках 2.4 — 2.7 и представляют собой зависимость значений фазовых координат от времени.
На рисунке 2.4 представлены множество траекторий, снятых с экспериментальной установки в процессе эксперимента. На рисунке 2.5 представлены усредненные траектории, а на рисунке 2.6. — интерполированные; рисунки а ) представляют собой угол поворота, а рисунки б ) — скорость. На рисунке 2.7 изображено подаваемое в процессе эксперимента управление.

Используя приведенные исходные данные, была построена таблица, как было показано выше и с помощью нее сформированы матрицы X и Y . Подставив эти матрицы в выражение (2.10), был получен вектор-столбец оценочных параметров авторегрессионно-регрессионной модели объекта. Значения параметров АРРМ имеют вид, приведенный ниже:
 (2.12)
(2.12)
Таким образом был получен общий вид авторегрессионно-регрессионной модели объекта, который приведен ниже:
![]() (2.13)
(2.13)
Для получения значений wt , необходимо задаться выражением:
![]()
Проверим адекватность полученной модели. Для этого сравним исходные данные, полученные экспериментально, и данные полученные с помощью математической модели, вид которой приведен выше.
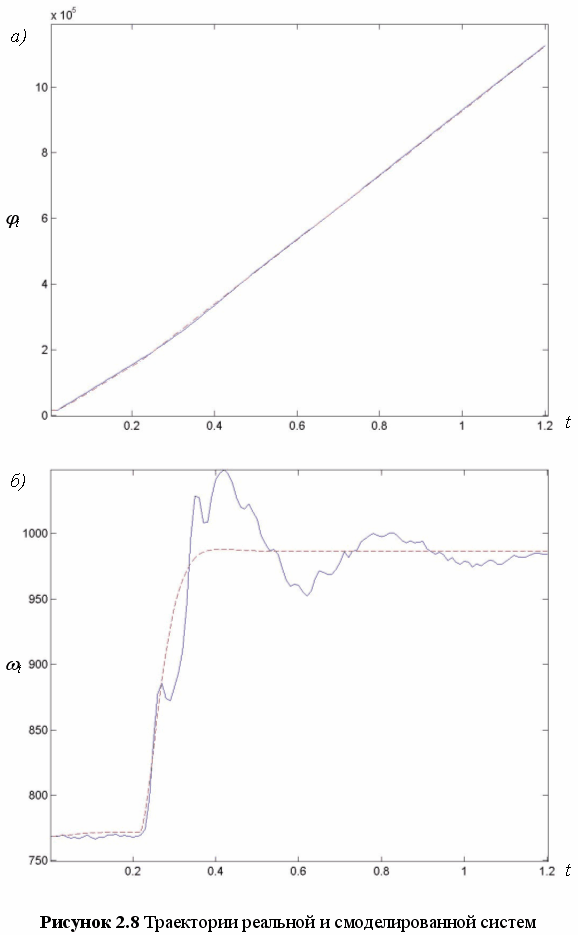
На рисунке 2.8 представлены эталонная и смоделированная траектории движения системы. На рисунке 2.8, а изображены графики изменения угла поворота jt , а на рисунке 2.8, б — графики изменения скорости поворота wt . Из графика видно, что авторегрессионно-регрессионная модель объекта, с данными параметрами адекватно описывает поведение реальной системы.
Таким образом был получен вид авторегрессионно-регрессионной модели, удовлетворяющий требованием точности. Процесс идентификации завершился за шаг.
Следует упомянуть тот факт, что данная модель описывает траектории системы не в принятых единицах измерения углов и скоростей, а в некоторых унифицированных импульсах, которые используются в данной электромеханической системе. Для перехода к градусам необходимо воспользоваться следующим выражением: ![]() где j — искомый угол, n
— количество импульсов.
где j — искомый угол, n
— количество импульсов.
2.3 Формирование ограничений
Любая реальная техническая система имеет ограничения на управление. Это обусловлено конструкцией и техническими характеристиками рассматриваемой системы. Ограничения отражаются в технических условиях на эксплуатацию системы.
Управляющим параметром электропривода является напряжение на якоре, которое обозначается U
. В связи с техническими особенностями данного объекта управления, напряжение на якоре не может превышать некоторого предельно допустимого значения. Это обусловлено максимальным током в обмотке якоря ![]() , а также характеристиками источника энергии, используемого в данной системе. Таким образом, необходимо учитывать это ограничение при разработке управляющего устройства.
, а также характеристиками источника энергии, используемого в данной системе. Таким образом, необходимо учитывать это ограничение при разработке управляющего устройства.
Еще одним ограничением на управляющий параметр, является то, что величина не может меняться скачкообразно на сколь угодно большую величину. Это ограничение обусловлено возможностями и конструкцией источника энергии и регулирующего устройства, которое задает характер изменения величины управляющего параметра. Это второе ограничение, накладываемое на управление.
Таким образом в данной работе рассматривается следующий случай: область управления U имеет размерность 2, т.е. эта область представляет собой плоскость в пространстве управлений.
Математически область управления U для данной системы задается следующей системой выражений:
 (2.14)
(2.14)
где первое выражение накладывает ограничение на величину, а второе — на скорость изменения значения управляющего параметра. Выражение (2.14) представляет собой ограничения, написанные для непрерывных систем. Так как в рассматриваемом случае рассматривается дискретное время, то перепишем систему (2.14) в виде, пригодном для дискретных систем:
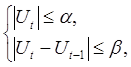 (2.15)
(2.15)
где ![]() — представляет собой разность значений управляющего параметра текущего и предыдущего моментов времени, что для дискретных систем является аналогом скорости непрерывных систем.
— представляет собой разность значений управляющего параметра текущего и предыдущего моментов времени, что для дискретных систем является аналогом скорости непрерывных систем.
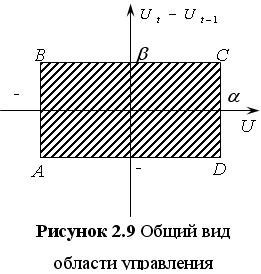
На рисунке 2.9 представлен общий вид области управления для рассматриваемой задачи.
Реальные численные значения данных границ зависят от коэффициентов масштабирования реальной системы, которые определяются входящими в систему усилителями и преобразователями, и выбираются для каждого моделируемого объекта индивидуально, в строгом соответствии с техническими условиями и правилами эксплуатации. Для данной системы ограничения имеют вид:
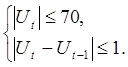 (2.16)
(2.16)
Для того чтобы перейти из пространства управлений в базис времени необходимо воспользоваться теоремой Гамкрелидзе о числе переключений [1]. Движение будет осуществляться по граням области управления, т.е. по сторонам прямоугольника в пространстве управлений. На рисунке 2.10 представлены ограничения в координатах (t, U ).
Ограничение на величину параметра представляет собой две горизонтальные линии, обозначенные на рисунке пунктиром, с ординатами a и –a. Ограничение на скорость изменения величины управляющего параметра определяется углом g наклона траектории:
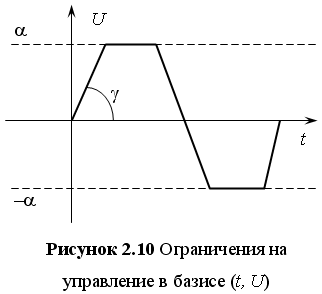
Как видно из рисунка 2.10 управление имеет вид кусочно-гладкой функции с несколькими переключениями.
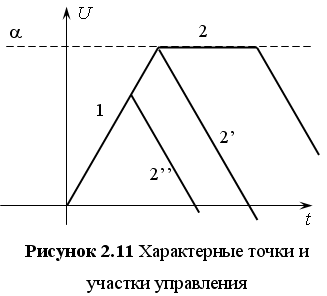
Точки переключений в базисе (t, U ), соответствуют вершинам прямоугольника области управления (рисунок 2.9). Участок 1 на рисунке 2.11 соответствует движению по часовой стрелке по отрезку BC . Это движение будет длиться до момента достижения точки C , далее движение будет происходить по отрезку CD , на рисунке 2.11 этому движению соответствует участок 2. Движение по участку CD в пространстве управлений будет длиться до момента достижения точки D и т.д.
Существует один интересный случай, когда скорость управления, скачком меняется на противоположное значение, т.е. в пространстве управлений будет наблюдаться скачок с отрезка BC на отрезок CD . Этому соответствует участок 2’ в базисе (t, U ). Участок 2’’ на рисунке 2.11 соответствует скачку с отрезка BC на отрезок CD в пространстве управлений, не достигнув точки переключения.
На самом деле такой характер изменения скорости допустим, так как при задании ограничений говорилось, что скачком не может меняться только величина управляющего параметра, тогда как на скорость изменения этого параметра такого ограничения не накладывалось. Это не противоречит рассуждениям приведенным в разделе 1.1. То есть управляющий параметр является не безынерционным, а скорость изменения этого параметра — безынерционным. Правомерность этого утверждения легко подтверждается физическим смыслом управления, являющегося напряжением на якоре.
Необходимо рассмотреть случай, при котором возникшую ошибку можно ликвидировать за один шаг. Запишем регулятор для АРРМ вида (2.8), обеспечивающий равенство ![]() . Выражение для такого регулятора имеет вид:
. Выражение для такого регулятора имеет вид:

или для ошибки:
 [5]
[5]
Будем называть такое управление одношаговым. Для реализации такого управления необходимо, чтобы выработанное таким образом управление также удовлетворяло условию (2.15), а иначе такое управление является нереализуемым за один шаг.
2.4 Формирование оптимальных траекторий
Как было указано выше (раздел 1.1), оптимальной траекторией называют траекторию x( t) , по которой фазовая точка за кратчайшее время переходит из состояния x0 в состояние x1 . Такой переход будет осуществляться при приложении оптимального управления. Оптимальным управление будет при движении по граням (границам) области управления в пространстве управлений. Для данной задачи, областью управления является прямоугольник (рисунок 2.9). Таким образом, управления будут представлять собой константные и линейно-нарастающие воздействия.
Для построения оптимальных траекторий необходимо найти решение математического выражения, с помощью которого описывается объект управления. В данном случае это авторегрессионно-регрессионная модель. Есть несколько способов решения данного уравнения: численный и аналитический. Численное решение удобно для применения ЭВМ, но имеет один недостаток. Так как решение имеет итерационный характер, то в процессе вычислений с каждым шагом накапливается ошибка. Аналитическое решение не страдает указанным недостатком и является более универсальным и точным по сравнению с численным, но в данном случае проблемы сопряжены с поиском решения.
Из теории линейных разностных уравнений известно, что общий вид аналитического решения для выражения (2.8) имеет вид:
![]() (2.17)
(2.17)
где ![]() — общее решение линейного неоднородного разностного уравнения,
— общее решение линейного неоднородного разностного уравнения, ![]() — общее решение линейного однородного разностного уравнения,
— общее решение линейного однородного разностного уравнения, ![]() — частное решение линейного неоднородного разностного уравнения. Более подробно выражение (2.17) можно записать в виде:
— частное решение линейного неоднородного разностного уравнения. Более подробно выражение (2.17) можно записать в виде:
 (2.18)
(2.18)
где m
— порядок авторегрессии; ![]() — константы, определяемые из начальных условий;
— константы, определяемые из начальных условий; ![]() — корни характеристического уравнения (2.19) для исходного разностного уравнения (2.8),
— корни характеристического уравнения (2.19) для исходного разностного уравнения (2.8), ![]() — коэффициенты авторегрессионно-регрессионной модели (2.8). [6]
— коэффициенты авторегрессионно-регрессионной модели (2.8). [6]
![]() (2.19)
(2.19)
где m — порядок авторегрессии. Для третьего порядка авторегрессии, выражение (2.18) будет иметь вид:
![]() (2.20)
(2.20)
 (2.21)
(2.21)
Подставим в выражения (2.20) и (2.21) коэффициенты модели (2.13). После подстановки выражения будут иметь вид:
![]() (2.22)
(2.22)
![]()
Для нахождения общего вида аналитического решения уравнения (2.13) необходимо найти корни характеристического уравнения (2.22) и коэффициенты ci выражения (2.21).
При нахождении корней характеристического уравнения (2.22) удобно воспользоваться функцией roots математического пакета MatLab. В результате расчетов были получены следующие значения:
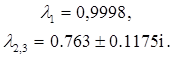
Так как в результате вычислений был получен комплексно-сопряженный корень, то данное аналитическое решение является не удобным для использования в алгоритме и далее вычисления будут проводиться численными методами. Ниже приведены построенные оптимальные траектории в пространстве управлений. Эти траектории построены с учетом ограничений налагаемых на управление. Ограничения имеют вид системы (2.16). Таким образом, были построены траектории, соответствующие константному значению управляющего параметра и линейно-нарастающему.
На рисунке 2.12 представлены траектории системы соответствующие константному значению управляющего параметра без учета ограничения на скорость. На графике 2.12, а представлен график управления, на графике 2.12, б — траектория системы в пространстве фазовых координат системы (jt , w t ), на графике 2.12, в — траектория системы в базисе (t , jt ), на графике 2.12, г — траектория системы в базисе (t , wt ).
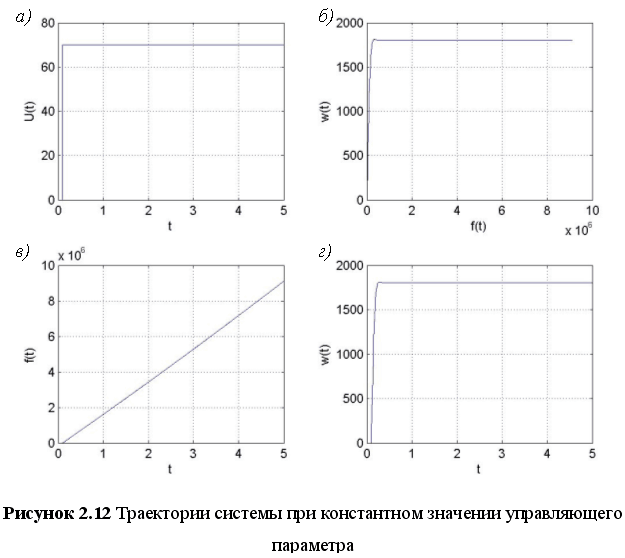
На рисунке 2.13 представлены траектории системы соответствующие линейно-нарастающему значению управляющего параметра без учета ограничения на значение параметра. На графике 2.13, а представлен график управления, на графике 2.13, б — траектория системы в пространстве фазовых координат системы (jt , w t ), на графике 2.13, в — траектория системы в базисе (t , jt ), на графике 2.13, г — траектория системы в базисе (t , wt ).
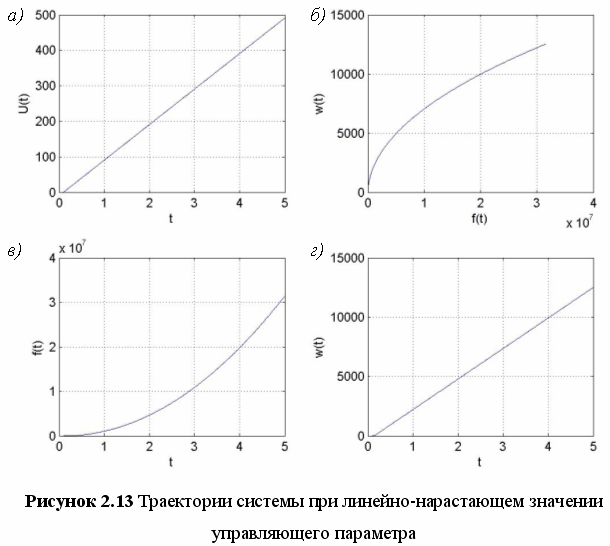
В процессе работы системы, управляющий параметр будет иметь несколько моментов переключения. В качестве иллюстрации этого случая приведен рисунок 2.14.
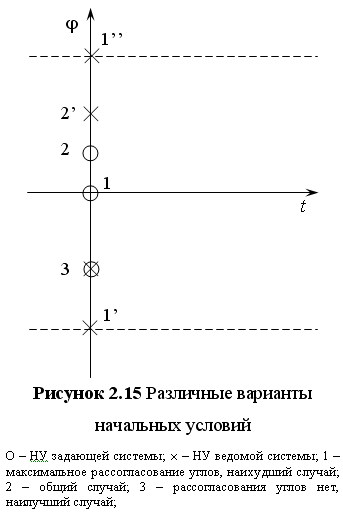
Движение системы при оптимальном управлении определяется начальными условиями. Рассмотрим начальные условия в базисе (t , jt ). Для данной системы максимальный угол рассогласования не может превышать 180°, по модулю. Таким образом, в базисе (t , jt ) необходимо выделить ограничения –p, +p, которые представляют собой горизонтальную полосу, внутри которой и будут располагаться точка, соответствующая начальному значению фазовой координаты j. На рисунке 2.15, показаны несколько вариантов начальных условий.
В зависимости от начальных условий, в базисе (jt , wt ) будет существовать множество траекторий. При различных углах в начальных условиях, траектории будут располагаться по горизонтали.
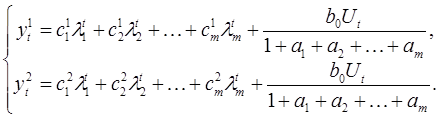
Как говорилось при постановке задачи, данная проблема решается в базисе ошибок. Для перехода в базис ошибок необходимо воспользоваться выражением (1.13):
Это выражение переводит множество траекторий из базиса (jt , wt ), в базис ошибок.
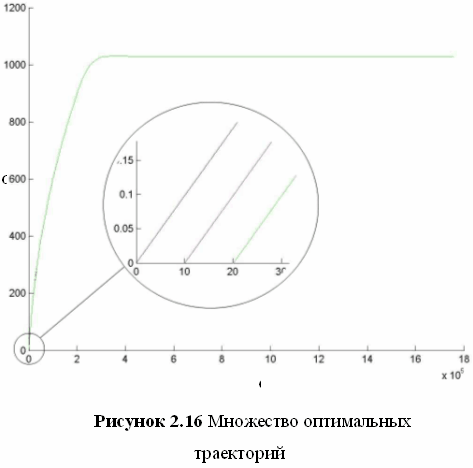
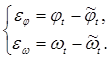
На рисунке 2.16 изображено множество оптимальных траекторий в базисе (jt , wt ), а на рисунке 2.17 изображены те же траектории в базисе ошибок. Положение траекторий в базисе ошибок зависит от начальной ошибки по обеим фазовым координатам, то есть от угла рассогласования и разности скоростей.
При различных начальных углах оптимальные траектории будут распределяться по горизонтали. На рисунке 2.16 показаны три траектории с начальными углами 0°, 10° и 20°. В указанных случаях, начальная скорость равна нулю.
При различных начальных скоростях, траектории будут иметь идентичный вид, но начальной точкой движения будет точка не лежащая на оси абсцисс.
2.5 Анализ решений
Для последующего анализа решений в базисе ошибок, необходимо рассмотреть несколько вариантов начальных условий. Для этого необходимо разбить пространство ошибок на характерные подпространства.
Так как угол рассогласования не может превышать угла в 180°, то и ошибка не может превышать этого значения. Таким образом, в базисе ошибок можно выделить вертикальную полосу шириной 2p ([–p, +p]), за границы которой ошибка по углу не может выходить. На самом деле, если ошибка ![]() превышает значение p, то угол рассогласования рассчитывается как показано ниже:
превышает значение p, то угол рассогласования рассчитывается как показано ниже:
![]() (2.23)
(2.23)
где ![]() — новое значение ошибки, не превышающее p.
— новое значение ошибки, не превышающее p.
Следует также упомянуть следующее: при положительной ошибке ![]() начальная точка будет находиться справа от оси ординат, а при положительной ошибке
начальная точка будет находиться справа от оси ординат, а при положительной ошибке ![]() — выше оси абсцисс.
— выше оси абсцисс.
Так как управление имеет ограничение на величину, то величина скорости вращения вала системы не будет превышать некоторого максимального установившегося значения. Таким образом, величина ошибки ![]() тоже не будет превышать некоторого максимального значения, определяемого максимальной скоростью системы и равной
тоже не будет превышать некоторого максимального значения, определяемого максимальной скоростью системы и равной ![]() . Из этого следует, что в базисе ошибок необходимо выделить горизонтальную полосу шириной
. Из этого следует, что в базисе ошибок необходимо выделить горизонтальную полосу шириной ![]() (
(![]() ), за границы которой ошибка по скорости не может выходить.
), за границы которой ошибка по скорости не может выходить.
Таким образом, в пространстве ошибок выделена прямоугольная область допустимых значений ошибок. Все движения будут происходить именно в этой области.
На рисунке 2.17 показаны оптимальные траектории в пространстве ошибок. Выделим из всего множества траекторий две, приводящие в ноль. Будем называть эти траектории главными. У левой главной траектории выделим верхнюю ветвь, а у правой — нижнюю. Движение по этим ветвям приводит в начало координат. Так как в разделе 1.4 была поставлена задача (1.12), то эти две ветви необходимо выделить особо, так как при движении по ним выполняется первое условие задачи (1.12).
Указанные выше ветви главных траекторий делят область ошибок на два подпространства P и Q . Анализ этих подпространств делается ниже.

Вокруг начала координат ограничим некоторую область S . Данная область соответствует такому положению системы, при котором управление необходимое для коррекции этой ошибки не будет превышать своего максимального значения, то есть не будет нарушаться первое выражение системы (1.13). В графической интерпретации, в пространстве управлений движение будет происходить по горизонтальным границам (рисунок 2.7). Верхняя и нижняя ветки главных траекторий разбивают пространство S на два подпространства — S 1 и S 2 .
Таким образом, были построены четыре подпространства в пространстве ошибок, которые изображены на рисунке 2.18.
Количество точек переключения и вид управления зависит от начальных условий. Рассмотрим различные варианты начальных условий:
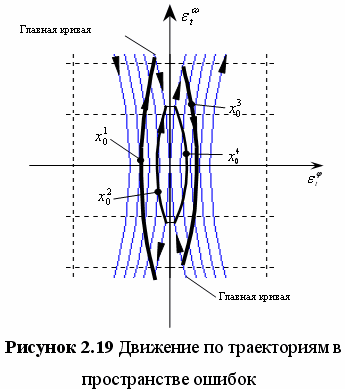
1) система находится в точке лежащей в плоскости P
(точка ![]() на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить по траектории, состоящей из двух кривых, то есть траектория будет иметь два интервала постоянства; этому движению соответствует управление с тремя точками переключения (рисунок 2.20, участок 1);
на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить по траектории, состоящей из двух кривых, то есть траектория будет иметь два интервала постоянства; этому движению соответствует управление с тремя точками переключения (рисунок 2.20, участок 1);
2) система находится в точке лежащей в плоскости S
1
(точка ![]() на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить также по двум кривым, то есть траектория будет иметь два интервала постоянства; но этому движению соответствует управление с двумя точками переключения (рисунок 2.20, участок 2);
на рисунке 2.19); в этом случае движение в пространстве ошибок будет проходить также по двум кривым, то есть траектория будет иметь два интервала постоянства; но этому движению соответствует управление с двумя точками переключения (рисунок 2.20, участок 2);
![]()
3) в случае когда система находится в подпространстве Q
, движение будет иметь такое же количество интервалов постоянства и точек переключения как и случай 1, но знак управляющего параметра изменится на противоположный (рисунок 2.19, точка ![]() , рисунок 2.20, участок 3);
, рисунок 2.20, участок 3);
4) в случае когда система находится в подпространстве S
2
, движение будет иметь такое же количество интервалов постоянства и точек переключения как и случай 2, но знак управляющего параметра изменится на противоположный (рисунок 2.19, точка ![]() , рисунок 2.20, участок 4);
, рисунок 2.20, участок 4);
Т. о. данные траектории являются решением задачи об оптимальном быстродействии и задача сводится к нахождению моментов времени переключений управляющего параметра U .
При определении моментов точек переключения можно использовать как аналитические выражения, так и численные методы. При определении моментов точек переключения аналитически необходимо решить систему уравнений вида (2.18) для частного случая, где одно из уравнений написано для кривой, являющейся главной траекторией, а другое — для кривой, проходящей через точку, в которой находится система в данный момент и пересекающую главную траекторию, описанную первым уравнением системы. Общий вид системы приведен ниже:
В том случае, если аналитические выражения не удовлетворяют требованиям, предъявленным к алгоритму в разделе 1.3, точки переключения необходимо искать численными методами.
Как уже было сказано выше, численные методы имеют итерационный характер, и не обладают высокой точностью.
2.6 Общая структура системы оптимального управления
В соответствии с выше изложенным материалом, построена система оптимального управления. Система представляет собой устройство, корректирующее управление на каждом шаге. Под шагом понимается момент времени, в который производится измерение угла как ведомого так и ведущего приводов.
Общая структура системы приведена на рисунке 2.21. В общей структурной схеме выделено два основных блока:
1) 1 — блок оптимального управления;
2) 2 — математическая модель объекта управления в виде АРРМ.
В блоке оптимального управления происходит выработка управления на каждом шаге.
![]()
Рассмотрим блок оптимального управления (блок 1) подробнее. Развернутая структурная схема блока оптимального управления представлена на рисунке 2.22.
В структурной схеме на рисунке 2.22 выделены следующие блоки:
1) 1 — первый блок выбора алгоритма расчета управления;
2) 2 — второй блок выбора алгоритма расчета управления;
3) 3 — выдача управления последнего шага;
4) 4 — выдача одношагового управления;
5) 5 — расчет и выдача оптимального управления.
![]()
В блоке 1 происходит определение того, нужно ли корректировать значение управляющего параметра, то есть если ошибка не превышает некоторого предельно допустимого значения, то корректировка управляющего параметра не производится. В работу включается блок 3, который выдает управление последнего шага, которое обеспечило движение с допустимой ошибкой.
Если ошибка превышает предельно допустимое значение, то в блоке 2 выясняется, можно ли достигнуть предельно допустимого значения ошибки за один шаг. Если это возможно, то в работу вступает блок 4, в котором рассчитывается и выдается одношаговое управление.
Если за один шаг значение ошибки не удается свести к предельно допустимому, то в работу вступает блок 5, в котором делается прогноз на применяемое управление. В нем определяется знак управления, находится количество точек переключений значения управляющего параметра, рассчитываются моменты времени, в которые будет происходить переключение управляющего параметра и выдается управление на следующий шаг. Структура блока 5 (рисунок 2.22) приведена на рисунке 2.23.
![]()
В структурной схеме на рисунке 2.23 выделены следующие блоки:
1) 1 — блок определения области в пространстве ошибок, в которой находится система на данном шаге;
2) 2 — блок определения знака управления и количества точек переключения управляющего параметра;
3) 3 — блок вычисления моментов времени, в которые будут происходить переключения управляющего параметра;
4) 4 — блок выработки управления на следующий шаг.
Таким образом, в данном разделе была рассмотрена общая структура блока оптимального управления, на основе которой можно построить его математическую модель.
2.7 Полученные результаты
В соответствии с проведенными рассуждениями и опираясь на структурную схему, приведенную в предыдущем разделе, была построена математическая модель данной системы оптимального управления. Математическое описание и программирование алгоритма проводилось в среде пакета MatLab 6.5.
Начальными данными для проведения расчетов является семейство траекторий системы, экспериментально полученные при проведении исследований динамических характеристик и параметров привода РЛС в ООО НПО «Горизонт» [3]. Исходные данные приведены на рисунке 2.4.
Для сравнения результатов были использованы данные, полученные в результате измерения выходных координат системы регулирования привода антенны, построенной с использованием ПИД-регулятора [3]. На рисунке 2.24 приведены зависимости ошибки рассогласования антенн (сплошная линия) и управления (пунктирная линия) от времени.
![]()
На рисунке 2.25 – 2.26 приведены данные, полученные в результате работы описанного выше алгоритма оптимального управления. На рисунке 2.25 приведен график зависимости полученного управления от времени. На рисунке 2.26, а приведен график зависимости угла поворота исполнительного органа установки от времени; на рисунке 2.26, б — график зависимости скорости поворота от времени; на рисунке 2.26, в — траектория движения системы в пространстве фазовых координат системы; на рисунке 2.26, г — график зависимости ошибки по углу поворота от времени; на рисунке 2.26, д — график зависимости ошибки по скорости поворота от времени и на рисунке 2.26, е — траектория движения системы в пространстве ошибок.
Проведем сравнительную характеристику представленных диаграмм. Из рисунка 2.24 видно, что процесс синхронизации антенн и выход на рабочий режим завершается приблизительно за десять секунд. Из графиков, приведенных рисунках 2.25 – 2.26 можно сделать вывод, что построенная система выходит на рабочий режим, приблизительно, за 1,5 секунды, что, почти, в 6 раз быстрее системы, построенной на основе ПИД-регулятора.
Процесс выхода на рабочий режим завершился с некоторой незначительной ошибкой, которую можно ликвидировать в следующем цикле работы системы оптимального управления. Этот процесс может продолжаться длительное время, поэтому необходимо задавать некоторое предельно допустимое значение ошибки, при котором работа системы будет удовлетворять техническим требованиям, предъявляемым к данной установке.
Таким образом, была смоделирована система управления, обеспечивающая более чем пятикратный выигрыш в быстродействии по сравнению с существующими системами, построенными на основе ПИД-регуляторов.
![]()
![]()
3 Практическая реализация
3.1 Реализация оптимального управления в среде пакета matlab
Для наглядного представления полученных в процессе работы алгоритма данных, все расчеты были выполнены в среде пакета MatLab. Была написана файл-функция Optimum_contr моделирующая работу блока оптимального управления и поведения системы в целом.
Структура программы имеет вид файл-функции, с несколькими подфункциями, описанными внутри данного файла. Такая организация позволяет запускать данную программу из командной строки интерпритатора MatLab.
Как было сказано выше, данная программа имеет ряд подпрограмм, описанных в основном файле.
Подпрограмма data_load() предназначена для загрузки начальных данных из файла.
Подпрограмма ident() производит вычисление параметров авторегрессионно-регрессионной модели с помощью метода МНК.
Для вычисления угловой скорости системы от угла существует подпрограмма calc_w(), которая вычисляет текущую скорость как разность текущего и предыдущего значений угла.
Подпрограмма upr() строит траекторию движения системы при заданном управлении в течении заданного количества шагов.
Подпрограмма u_calc() является основной частью системы. В ней производятся основные вычисления при выработке оптимального управления.
Подпрограмма znak() предназначена для определения начального знака управляющего параметра.
Подпрограмма countdot() определяет, в какую из областей пространства ошибок попадает фазовая точка системы в данный момент времени и вычисляет количество точек переключения управляющего параметра.
В подпрограмме dot_time() происходит вычисление моментов времени, в которые необходимо произвести переключение управляющего параметра.
В основном файле программы описаны и другие функции, рассматривать которые в рамках данной работы не имеет смысла, так как они являются вспомогательными и выполняют действия, необходимые для нормального функционирования системы.
3.2 Выбор микроконтроллера
Выбор типа контроллера обуславливается несколькими факторами, а именно: производительностью арифметическо-логического устройства, ёмкостью оперативного запоминающего устройства и постоянного запоминающего устройства, доступностью ПО для создания программ и отладки, а также доступностью на российском рынке.
При создании алгоритма изначально учитывалась его адаптация к применению в микроконтроллерах. Таким образом, был получен алгоритм, основанный лишь на элементарных арифметических операциях, которые не требуют разработки дополнительных библиотек для производимых вычислений. При адаптации к конкретной системе, для данного алгоритма необходимо провести предварительные вычисления — идентификацию установки — для загрузки полученных параметров в микроконтроллер.
В настоящее время большое распространение получила продукция фирм: INTEL, MICROCHIP и ATMEL. Большинство микроконтроллеров MICROCHIP и ATMEL имеют FLASH память программ, что позволяет достаточно просто выполнять отладку программного обеспечения, а также его обновление. Микроконтроллеры ATMEL семейства АТ89 совместимы с семейством MCS-51, которое в настоящее время получило широкое распространение. Для MCS-51 разработаны и доступны библиотеки и системы создания программ и отладки. Среди микроконтроллеров ATMEL семейства АТ89 имеется контроллер AT89S8252, который допускает программирование непосредственно в оборудовании, в котором используется, что особенно удобно на этапе разработки и отладки.
Контроллер AT89S8252 работает с тактовой частотой 24 МГц, что обеспечивает производительность порядка двух миллионов операции в секунду, имеет встроенные операции умножения и деления, 8 Кбайт ПЗУ программ и 256 байт ОЗУ данных. Анализ основных характеристик контроллера AT89S8252 показывает его пригодность для решения задачи, поставленной в данной работе.
4 Экономическое обоснование проекта
4.1 Технико-экономическая характеристика
Данный проект является научно-исследовательской разработкой (НИР) в области автоматизации деятельности предприятий и относится к информационным системам автоматизированного проектирования.
Целью проекта является создание программного продукта (ПП), основанного на математическом пакете MatLab, реализующего математическую модель системы управления, построенной на основе оптимального закона, для системы слежения РЛС.
Данный проект можно отнести к научно-исследовательской работе, которая принадлежит к типу прикладных, направленных на решение научных проблем с целью получения конкретных результатов, которые могут быть использованы в опытно-конструкторских разработках (ОКР). Постановка данной задачи на разработку соответствует требованиям соответствующим данному виду НИР. Характер проведения разработки ПО был таков, что на ряду с основными задачами решалась масса проблем, заключающихся в поиске оптимальных решений использования тех средств, которые предоставляли доступные программное, аппаратное обеспечения и математическая база.
4.2 Маркетинговая ориентация
На данном этапе разработки можно выбрать следующую маркетинговую ориентацию:
- преимущества у потребителя;
- с подкреплением;
- в реальном исполнении;
- по замыслу.
Ниже характеристики системы слежения РЛС с позиции маркетинга приведены в виде схемы на рисунке 4.1.
| Преимущества у потребителя: Система осуществляет автоматический вывод объекта (ДПТ) на заданную траекторию за минимальное время, а также слежение и отработку с необходимой точностью задающего (наблюдаемого) воздействия. |
||||||
| С подкреплением: Узкоспециализированный ПП, используемый для синтеза закона управления объектом (ДПТ), а также моделирования поведения системы под действием полученного оптимального закона управления. |
||||||
| В реальном исполнении: Структурная схема системы управления с набором аналитических выражений для основных управляющих органов объекта (ДПТ). |
||||||
| По замыслу: Автоматический выход на заданные параметры работы объекта за минимальное время. Движение по заданной траектории с установленной точностью. |
||||||
| Рисунок 4.1 Маркетинговая ориентация |
||||||
Пояснения к рисунку 4.1:
1) Основной целью создания ПП является автоматизация рабочего места научного сотрудника, а также поддержка принятия решений специалистов различного профиля. В ходе выполнения работы было проведено построение ММ информационной системы как задачи интеллектуальной системы автоматизированного проектирования и моделирования, были исследованы ее характеристики и вычислены некоторые параметры необходимые для практической реализации.
2) В реальном исполнении — это ПО информационной системы, функционально состоящее из структурной схемы системы управления с набором аналитических выражений для основных управляющих органов объекта (ДПТ). Система базируется на весьма распространенном в настоящее время классе ПЭВМ и имеет кросплатформенную реализацию.
3) Использование данного ПО носит специализированный характер: интерфейс пользователя обусловлен используемой программой интерпретатором (MatLab) и предназначен для освоения лицам, ранее работавшим с программой интерпретатором, но, возможно, не являющимися специалистами в области компьютерных технологий.
4) Основными достоинствами данного продукта являются гибкость, уникальность, оптимизация под требования конкретных задачи и заказчика. Система обладает относительно широкой аппаратной независимостью; некоторой программной (платформенной) независимостью (в пределах семейства Unix-подобных систем).
4.3 оценка научно-технической результативности и социальной эффективности НИР
Результатом НИР является достижение научного, научно-технического, экономического и социального эффекта.
Научный эффект характеризует получение новых научных знаний и отражает прирост информации, предназначенной для внутринаучного потребления. Научно-технический эффект характеризует возможность использования результатов выполняемых исследований в других НИР или ОКР и обеспечивает получение информации, необходимой для создания новой техники. Экономический эффект характеризуется выраженной в стоимостных показателях экономией живого и овеществленного труда в общественном производстве, полученной при использовании результатов прикладных НИР. Социальный эффект проявляется в улучшении условий труда, повышении экологических характеристик, развитии здравоохранения, культуры, науки, образования, и т.д.
Для итоговой оценки результатов НИР в зависимости от вида выполняемых исследований и поставленных целей в качестве критерия эффективности принимается один из видов эффекта, а остальные используются в качестве дополнительных характеристик.
Специфика проводимой работы не позволяет нам взять в качестве базового критерия — экономический или социальный эффект, поэтому имеет смысл остановиться на рассмотрении научного и научно-технического эффекта.
Количественную оценку научного эффекта целесообразно производить путем расчета научной результативности, научно-технического эффекта — научно-технической результативности.
Оценка научной и научно-технической результативности для НИР производится с помощью коэффициентов, рассчитываемых по формулам:
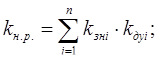 (4.1)
(4.1)
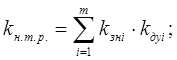 (4.2)
(4.2)
где ![]() — коэффициент научной результативности;
— коэффициент научной результативности; ![]() — коэффициент научно-технической результативности;
— коэффициент научно-технической результативности; ![]() — коэффициент значимости i
-го фактора;
— коэффициент значимости i
-го фактора; ![]() — коэффициент достигнутого уровня i
-го фактора; n,
m
— соответственно количество факторов научной и научно-технической результативности.
— коэффициент достигнутого уровня i
-го фактора; n,
m
— соответственно количество факторов научной и научно-технической результативности.
Для поисковых исследований рассчитывается коэффициент научной результативности и коэффициент научно-технической результативности.
При оценке научной и научно-технической результативности используются различные факторы, влияющие на их количественную оценку. В качестве факторов при оценке научной результативности могут быть приняты:
- новизна полученных или предполагаемых результатов;
- глубина научной проработки;
- степень вероятности успеха (при незавершенности работы).
В качестве факторов при оценке научно-технической результативности могут применяться:
- перспективность использования; масштаб реализации;
- завершенность полученных результатов.
В таблице 4.1 приведены факторы и признаки, характеризующую научную результативность, а в таблице 4.2 научно-техническую результативность НИР, а так же числовые значения ![]() и
и ![]() .
.
Таблица 4.1. Характеристика факторов и признаков научной результативности фундаментальных НИР
| Фактор научной результативности |
Коэффициент значимости фактора, k нз |
Качество фактора |
Характеристика фактора |
Коэффициент достигнутого уровня, k ду |
| Новизна полученных или предполагаемых результатов |
0,5 |
Высокая |
Получены принципиально новые результаты, неизвестные ранее науке, создана новая теория, открыта новая закономерность. |
1,0 |
| Средняя |
Установлены некоторые общие закономерности, методы, способы, позволяющие создать принципиально новые виды техники. |
0,7 |
||
| Недостаточная |
Положительное решение поставленных задач на основе простых сообщений, анализ связей между фактами, распространение неизвестных научных принципов на новые объекты. |
0,3 |
||
| Тривиальная |
Описание отдельных элементарных факторов, передача и распространение ранее полученных результатов, реферативные обзоры. |
0,1 |
||
| Фактор научной результативности |
Коэффициент значимости фактора, k нз |
Качество фактора |
Характеристика фактора |
Коэффициент достигнутого уровня, k ду |
| Глубина научной проработки |
0,35 |
Высокая |
Выполнены сложные теоретические расчеты, результаты проверены на большом количестве экспериментальных данных. |
1,0 |
| Средняя |
Сложность теоретических расчетов не высока, результаты проверены на ограниченном количестве экспериментальных данных. |
0,6 |
||
| Недостаточная |
Теоретические расчеты просты, экспериментальная проверка не проводилась. |
0,1 |
||
| Степень вероятности успеха |
0,15 |
Большая |
Успех весьма возможен, имеется большая вероятность положительного решения поставленных задач. |
1,0 |
| Умеренная |
Поставленные задачи теоретически и технически осуществимы, успех возможен. |
0,6 |
||
| Малая |
Теоретически осуществимо, но идея рискованная, успех весьма сомнителен. |
0,1 |
Таблица 4.2. Характеристика факторов и признаков научно-технической результативности фундаментальных НИР
| Фактор научной результативности |
Коэффициент значимости фактора, k нз |
Качество фактора |
Характеристика фактора |
Коэффициент достигнутого уровня, k ду |
| Перспективность использования результатов |
0,5 |
Первостепенная важность |
Результаты могут быть использованы во многих научных направлениях, имеют значение для развития сопряженных наук. |
1,0 |
| Важная |
Результаты будут использованы в конкретном научном направлении при разработке новых технических решений, направленных на существенное повышение производительности общественного труда в народном хозяйстве. |
0,8 |
||
| Полезная |
Результаты будут использованы при проведении последующих НИР, при разработке новых технических решении в конкретной отрасли народного хозяйства. |
0,5 |
||
| Масштаб возможной реализации результатов |
0,3 |
Народно-хозяйственный |
Время реализации, лет: До 3 - 5 - 10 - свыше 10 |
0,5 0,6 0,8 1,0 |
| Отраслевой |
Время реализации, лет: До 3 - 5 - 10 - свыше 10 |
0,8 0,7 0,5 0,3 |
||
| Отдельные организации и предприятия |
Время реализации, лет: До 3 - 5 - 10 - свыше 10 |
0,2 0,3 0,4 0,5 |
||
| Завершенность полученных результатов |
0,2 |
Высокая |
Методика, инструкция, руководящие материалы, классификатор, нормативы. |
1,0 |
| Средняя |
Технические задания на прикладные НИР или ОКР |
0,8 |
||
| Фактор научной результативности |
Коэффициент значимости фактора, k нз |
Качество фактора |
Характеристика фактора |
Коэффициент достигнутого уровня, k ду |
| 0,2 |
Достаточная |
Рекомендации, развернутый анализ, предложения. |
0,6 |
|
| Недостаточная |
Обзор, информационным сборник. |
0,4 |
Произведем расчет данных коэффициентов:
1. Оценка научно-технической результативности:
1.1. Новизна полученных или предполагаемых результатов: ![]() . Качество фактора: средняя.
Установлены некоторые общие закономерности, методы, способы, позволяющие создать принципиально новые виды техники
. Качество фактора: средняя.
Установлены некоторые общие закономерности, методы, способы, позволяющие создать принципиально новые виды техники ![]() .
.
1.2. Глубина научной проработки: ![]() .
Качество фактора: средняя.
Сложность теоретических расчетов не высока, результаты проверены на ограниченном количестве экспериментальных данных
.
Качество фактора: средняя.
Сложность теоретических расчетов не высока, результаты проверены на ограниченном количестве экспериментальных данных ![]() .
.
1.3. Степень вероятности успеха: ![]() . Качество фактора: умеренная.
Поставленные задачи теоретически и технически осуществимы, успех возможен
. Качество фактора: умеренная.
Поставленные задачи теоретически и технически осуществимы, успех возможен ![]() .
.
2. Характеристика факторов и признаков научно-технической результативности фундаментальных НИР.
1.1. Перспективность использования результатов ![]() .
Качество фактора: важная.
Результаты будут использованы в конкретном научном направлении при разработке новых технических решений, направленных на существенное повышение производительности общественного труда в народном хозяйстве
.
Качество фактора: важная.
Результаты будут использованы в конкретном научном направлении при разработке новых технических решений, направленных на существенное повышение производительности общественного труда в народном хозяйстве ![]() .
.
1.2. Масштаб возможной реализации результатов: ![]() . Качество фактора: отраслевой.
Время реализации до 3 лет
. Качество фактора: отраслевой.
Время реализации до 3 лет ![]() .
.
1.3. Завершенность полученных результатов ![]() . Качество фактора: средняя.
Техническое задание на прикладных HИР или ОКР
. Качество фактора: средняя.
Техническое задание на прикладных HИР или ОКР ![]() .
.
Полученные значения коэффициентов подставим в приведенные выше формулы (.1) и (.2):

4.4 Производственный план
Процесс изготовления УСиУ включает в себя следующие этапы:
- изготовление основы для печатной платы;
- изготовление корпусов;
- установка микросхем и других элементов на печатные платы;
- пайка элементов;
- сборка устройства;
- проверка работоспособности;
- устранение неисправностей;
- выпуск инструкции по эксплуатации;
- изготовление упаковки;
- упаковка.
Производство планируется на базе АО «Х», при этом изготовление основ для плат, корпусов, упаковки и выпуск инструкций будет осуществляться смежниками, а основные работы — цехом «х», который специализируется на ремонте и обслуживании электронных систем различного технологического оборудования предприятия. Цех оснащён современным электронным оборудованием, его работники имеют высокую квалификацию.
4.4.1 Расчёт затрат на разработку
Основная заработная плата
К этой статье относится заработная плата сотрудников непосредственно связанных с выполнением НИР, а также зарплата сотрудников внештатного состава, привлекаемых к разработке и выполнению НИР.
Таблица 4.3 Заработная плата сотрудников
| Должность |
Заработная плата в месяц, руб. |
Стоимость одного рабочего дня, руб. |
| Руководитель проекта |
10200 |
510 |
| Разработчик |
5600 |
280 |
Таблица 4.4 Затраты на оплату труда
| Этапы разработки |
Исполнитель |
Трудоемкость, чел. /день |
Оплата работникам руб./день |
Примечание |
| 1. Постановка задачи |
руководитель проекта |
1 |
510 |
|
| 2. Разработка структурной схемы устройства |
руководитель проекта, разработчик |
5 |
2550 1400 |
|
| 3. Выбор электрических схем согласно структурной схеме |
разработчик |
10 |
2800 |
|
| 4. Разработка схемы электрической принципиальной |
разработчик |
6 |
1680 |
|
| 5. расчёт элементов схемы электрической принципиальной |
разработчик |
7 |
1960 |
|
| 6. Составление перечня элементов |
разработчик |
3 |
840 |
|
| Итого |
2 человека |
32 |
11740 |
Таким образом основная заработная плата составляет:
Зо = 11740 руб.
Дополнительная заработная плата
Размер дополнительной заработной платы сотрудников, непосредственно выполняющих НИР, определяется в процентах от основной. В научных учреждениях она составляет 10–15% от основной заработной платы.
Дополнительная заработная плата составляет:
Зд = 0,12* Зо = 1408,8 руб.
Отчисления на социальное страхование
На эту статью относятся отчисления на оплату перерывов в работе по причине временной нетрудоспособности.
Отчисления на социальное страхование:
Осс = 0,365*( Зо + Зд ) = 4799,3 руб.
Накладные расходы
Таблица 4.5 Накладные расходы
| Наименование затрат |
Количество, шт. |
Стоимость, руб. |
| Канцелярские товары: бумага формата А1 ; бумага формата А4: тетрадь общая; карандаш; ластик; ручка; прочие затраты. |
3 100 1 3 2 3 |
20 100 10 10 8 5 70 |
| Единовременные затраты: ЭВМ. |
1 |
400 |
| Итого |
701 |
Накладные расходы:
Рн = 701 руб.
Затраты на проектирование составляют:
Зпр = Зо + Зд + Осс + Рн ;
Зпр = 11740 + 1408,8 + 4799,3 + 701 = 18649,1 руб.
4.4.2 Затраты на создание опытного образца
Закупка комплектующих для производства УСиУ будет производиться в фирмах г. Ростова-на-Дону, занимающихся оптовой торговлей электронными элементами, или непосредственно на предприятиях-производителях.
Таблица 4.6 Комплектующие материалы
| Статьи затрат |
Кол-во, шт. |
Цена за один элемент, руб. |
Сумма, руб. |
| 1. Основной материал: Стеклотекстолит размером 15x10 см; Припой ПОС-61 (0,2 кг); Флюс КЭ (0,1 кг); Спирт этиловый (0,05 кг); |
30 35 10 15 |
||
| 2. Комплектующие: Микросхемы; Резисторы; Разъёмы; Изолированный проводник; Другие. |
21 12 2 2 |
28,5 1,4 20 5 |
600 17 40 10 |
| Итого |
757 |
Таблица 4.7 Потребность в персонале и оплате труда.
| Вид работы |
Кол-во человек |
Квалификация |
Оплата труда за единицу продукции |
| 1. Изготовление печатной платы: разводка плата; радиомонтаж. |
1 |
Радиомонтажник 4-го разряда |
350 |
| 2. Изготовление корпуса для платы |
2 |
Конструктор, слесарь-сборщик 4-го разряда |
300 205 |
| 3. Сборка |
1 |
Слесарь-сборщик 4-го разряда |
73 |
| Итого |
3 |
928 |
Затраты на опытный образец:
Зоб = Зкм + Зот ;
Зоб = 757 + 928 = 1685 руб.
4.4.3 Затраты на эксплуатацию
Таблица 4.8 Структура затрат на производство
| Наименование затрат по экономическим элементам |
Величина затрат % |
Величина затрат руб. |
| 1 . Материальные затраты 2. Заработная плата 3. Отчисления на социальное страхование 4. Энергоресурсы 5 . Амортизационные отчисления 6. Ремонтный фонд оборудования 7. Прочее |
44 30 40% от ЗП 8 9 7 2 |
1996,3 1361 544,4 363 408,3 317,6 90,75 |
| Итого |
100 |
4537 |
Таблица 4.9 Расчёт общих затрат
| Наименование затрат |
Стоимость, руб. |
| 1. Затраты на проектирование Зпр 2. Затраты на опытный образец 3об 3. Затраты на маркетинг Зм (10% от Зоб ) |
18649,1 1685 168,5 |
| Суммарные затраты по проекту |
20502,6 |
4.4.4 Ценообразование
Цена проекта, определяется себестоимостью и прибылью, которая в свою очередь составляет 10% от себестоимости. Себестоимость равна величине затрат на производство. Таким образом:
Цена проекта = себестоимость + % рентабельности;
Цпр = 4537 + 0,1*4537 = 4990,7 руб.
Примем цену продажи равной Цпр = 4990 руб.
Затраты в оборотные средства на создание запаса комплектующих и незавершённого производства:
Oc = C*Ncp ,
где С — себестоимость; Ncp — среднеквартальный выпуск изделий в 1-м полугодии планируемого периода;
Ос = 4990*17.5 = 87325 руб.
Округленно, потребность в основном капитале определена в сумме 20500 руб.; в оборотном капитале — 87300 руб.
Таким образом, общая потребность в инвестициях определена в размере 107800 руб.
Выводы
Проведенный расчет показал перспективность проводимой научной разработки. Коэффициенты научной результативности и научно-технической результативности показали, что результаты выполняемых исследований могут быть использованы и в других НИР или ОКР. Иными словами масштабы реализации и применения результатов данной НИР велики. Что касается завершенности полученных результатов, то хотелось бы отметить следующее. В данной НИР решена основная задача слежения — движение по заданной траектории, но полноценность решения задачи зависит от каждого частного случая.
5 Безопасность и экологичность проекта
Программный продукт (ПП), реализующий синтез оптимального управления для системы слежения, позволяет, на этапе синтеза, получать рабочие параметры математической модели, которые в дальнейшем могут быть использованы для настройки реальных электронных устройств слежения и управления (УСиУ), а также моделировать и отображать в удобной для человека форме поведение системы при синтезированном управлении. Таким образом, данный ПП позволяет не только рассчитывать рабочие параметры, но и проверять их работоспособность без непосредственного запуска дорогостоящего и энергоемкого оборудования, что, в свою очередь повышает экологичность разработки.
В процессе работы с программой оператор взаимодействует с ЭВМ. При работе с техническими средствами и с вычислительной техникой, в частности, одной из основных составляющих при обеспечении условий охраны труда является эргономическая безопасность рабочего места. Выполнение требований эргономичности означает гарантию комфортности, эффективности, безопасности и надежности работы человека с ПК.
Эргономическая безопасность ПК включает в себя следующие требования:
- требования к визуальным параметрам средств отображения информации индивидуального пользования;
- требования к эмиссионным параметрам ПК – параметрам излучений дисплеев, системных блоков, источников и др.;
- требования к показателям безаварийности.
Другим важным фактором обеспечения безопасности труда является правильная организация электропитающих сетей. Очень часто для нормального, а главное, безопасного функционирования вычислительных центров и предотвращения таких чрезвычайных ситуаций как пожар, требуется переоборудование электропроводки в помещениях, в которых располагаются ЭВМ.
5.1 Анализ опасных и вредных факторов
Для безопасной и комфортной работы человека-оператора необходимо, чтобы все условия его труда соответствовали оптимальным. При этом под условиями работы подразумевается комплекс различных факторов, установленных стандартами по безопасности труда (ССТБ).
Этот комплекс включает в себя следующие факторы:
- психофизические;
- биологические;
- химические;
- и физические факторы.
К психофизическим факторам относятся различные физические (зрительное перенапряжение) и нервно-психические (монотонность труда, умственное и эмоциональное перенапряжение) перегрузки, которые приводят к снижению работоспособности и развитию утомляемости.
К биологическим факторам относят микро- и макроорганизмы, присутствующие в помещении.
К физическим факторам относят электромагнитные и ионизирующие излучения, статическое электричество, шум, вибрацию, недостаточную или повышенную освещенность рабочего места, а также неблагоприятный микроклимат.
Проведение мероприятий по улучшению условий труда дает ощутимый экономический эффект — повышается производительность труда, снижаются затраты на восстановление утраченной трудоспособности.
Основные требования к условиям охраны труда на автоматизированном рабочем месте (АРМ) должны соответствовать «Гигиеническим требованиям к видеодисплейным терминалам, персональным электронно-вычислительным машинам и организации работы» (СанПиН 2.2.2.542-96).
5.2 Мероприятия по улучшению условий труда
5.2.1 Помещения и их освещение
Помещения, в которых располагаются автоматизированные рабочие места (АРМ), должны отвечать требованиям, предъявляемым к освещению и условиям микроклимата.
Площадь на одно рабочее место с ВДТ или ПЭВМ для пользователей должна составлять не менее 6,0 кв. м, а объем — не менее 20,0 куб. м.
Производственные помещения, в которых для работы используются преимущественно ВДТ и ПЭВМ не должны граничить с помещениями, в которых уровни шума и вибрации превышают нормируемые значения (механические цеха, мастерские, гимнастические залы и т.п.).
Звукоизоляция ограждающих конструкций помещений с ВДТ и ПЭВМ должна отвечать гигиеническим требованиям и обеспечивать нормируемые параметры шума согласно требованиям раздела 6 СанПиН 2.2.2.542-96.
Поверхность пола в помещениях эксплуатации ВДТ и ПЭВМ должна быть ровной, без выбоин, нескользкой, удобной для очистки и влажной уборки, обладать антистатическими свойствами.
Правильная организация освещения производственных участков является одним из важнейших факторов предотвращения травматизма и профессиональных заболеваний. Для этого необходимо учитывать яркость источников света, их расположение в помещении, яркостной контраст между устройствами ЭВМ и фоном, качество и цвета светильников и поверхностей.
Рабочие места должны располагаться в помещениях, где применяется как естественное, так и искусственное освещение, причем искусственное освещение применяется не только в темное, но и в светлое время суток. Запрещается расположение АРМ в подвальных помещениях.
Искусственное освещение в помещении следует осуществлять в виде комбинированной системы освещения с использованием люминесцентных источников света в светильниках общего освещения.
В помещении должна быть обеспечена равномерная освещенность, что достигается преимущественно отраженным или рассеянным светораспределением. Осветительные установки не должны создавать слепящих бликов на клавиатуре, а также на экране видеотерминала в направлении глаз оператора.
Существует три вида систем освещения: прямая, отраженная и диффузная. При прямом освещении почти весь свет от источников попадает прямо на рабочие поверхности, что вызывает резкую контрастность, блесткость и резкие тени. При освещении отраженным светом его лучи направляются на потолок и верхнюю часть стен, а уже от них равномерно отражается по всему помещению, не создавая ярких бликов и резких теней. Диффузное освещение является средним между прямым и отраженным по параметрам блесткости и образования теней, однако является наименее энергозатратным. Наиболее приемлемым в нашем случае является применение системы отраженного света.
Освещенность поверхности стола в зоне размещения рабочего документа должна составлять 300–500 лк. Для малой и средней контрастности поверхностей ЭВМ при темном фоне наименьший уровень освещенности должен составлять 150 лк, для большой контрастности — 100 лк.
Для внутренней отделки интерьера помещений с ВДТ и ПЭВМ предлагается использовать диффузно-отражающие материалы с коэффициентом отражения для потолка — 0,7–0,8; для стен — 0,5–0,6; для пола — 0,3–0,5.
Помещение должно быть оснащено аптечкой первой медицинской помощи и удовлетворять Нормам пожарной безопасности НПБ 105-95 и ГОСТ 12.1.004-91.
5.2.2 Уровень шума и вибрация
При выполнении основной работы на ВДТ и ПЭВМ уровень шума на рабочем месте не должен превышать 50 дБА (приложение 19, п.2.7 СанПиН 2.2.2.542-96).
В помещениях, где работают инженерно-технические работники, осуществляющие лабораторный, аналитический или измерительный контроль, уровень шума не должен превышать 60 дБА.
В помещениях операторов ЭВМ (без дисплеев) уровень шума не должен превышать 65 дБА.
На рабочих местах в помещениях для размещения шумных агрегатов вычислительных машин (АЦПУ, принтеры и т.п.) уровень шума не должен превышать 75 дБА (Приложение 7 СанПиН 2.2.2.542-96).
При выполнении работ с ВДТ и ПЭВМ в производственных помещениях уровень вибрации не должен превышать допустимых значений согласно Санитарным нормам вибрации рабочих мест (категория 3, тип в, приложения 8 и 19, п.2.8 СанПиН 2.2.2.542-96).
Шумящее оборудование (АЦПУ, принтеры и т.п.), уровни шума которого превышают нормированные, предлагается располагать вне помещения с ВДТ и ПЭВМ.
Снизить уровень шума в помещениях с ВДТ и ПЭВМ можно использованием звукопоглощающих материалов с максимальными коэффициентами звукопоглощения в области частот 63 – 8000 Гц для отделки помещений (разрешенных органами и учреждениями Госсанэпиднадзора России), подтвержденных специальными акустическими расчетами.
Дополнительным звукопоглощением могут служить однотонные занавеси из плотной ткани, гармонирующие с окраской стен и подвешенные в складку на расстоянии 15-20 см от ограждения. Ширина занавеси должна быть в 2 раза больше ширины окна.
5.2.3 Параметры микроклимата
Независимо от состояния природных метеорологических условий данной местности в дисплейных производственных помещениях и на рабочих местах должны быть созданы климатические условия (производственный микроклимат) наиболее благоприятные для выполнения заданной работы. Климатические условия определяются сочетанием температуры, влажности и скорости перемещения воздуха, а также температуры окружающих поверхностей.
В производственных помещениях, в которых работа на ВДТ и ПЭВМ является основной, должны обеспечиваться оптимальные параметры микроклимата (приложение 4 СанПиН 2.2.2.542-96).
Уровни положительных и отрицательных аэроионов в воздухе помещений с ВДТ и ПЭВМ должны соответствовать нормам, приведенным в приложении 6; 19 (п.2.3) СанПиН 2.2.2.542-96.
Содержание вредных химических веществ в производственных помещениях, работа на ВДТ и ПЭВМ в которых является основной, не должно превышать Предельно допустимых концентраций загрязняющих веществ в атмосферном воздухе населенных мест (приложение 19, п.2.5 СанПиН 2.2.2.542-96).
Благоприятными условиями газового состава воздуха считается содержание кислорода 19-20%, углекислого газа около 1%; допустимые значения, при которых не происходит выраженного снижения работоспособности составляют: кислорода — 18–29%, углекислого газа — 1-2%. Снижение содержания кислорода ниже 16% и повышение содержания углекислого газа выше 3% являются недопустимыми и могут привести к нежелательным последствиям.
При контроле микроклимата на рабочих местах с дисплеями должны проводиться измерения температуры, относительной влажности и скорости движения воздуха в начале, середине и конце холодного и теплого периода года не менее трех раз в смену (в начале, середине и конце) специальными измерительными приборами.
Для повышения влажности воздуха в помещениях с ВДТ и ПЭВМ следует применять увлажнители воздуха, заправляемые ежедневно дистиллированной или прокипяченной питьевой водой.
Помещения с ВДТ и ПЭВМ должны оборудоваться системами отопления, кондиционирования воздуха или эффективной приточно-вытяжной вентиляцией. Расчет воздухообмена следует проводить по теплоизбыткам от машин, людей, солнечной радиации и искусственного освещения.
5.2.4 Защита от электромагнитных и электростатических полей
В целях предупреждения неблагоприятного влияния на человека электрического тока, электрических (ЭП), магнитных (МП) и электромагнитных полей используется система организационных и технических мероприятий, одной из составных частей которой является контроль уровней этих факторов, которые не должны превышать установленных норм.
В зависимости от места нахождения работающего относительно источника излучения он может подвергаться воздействию электрической или магнитной составляющих поля или их сочетания, а в случае пребывания в волновой зоне — воздействию сформированной электромагнитной волны.
Контроль уровней ЭП осуществляется по значению напряженности ЭП, выраженной в В/м (кВ/м).
Контроль уровней МП осуществляется по значению напряженности МП, выраженной в А/м (кА/м).
Энергетическим показателем для волновой зоны является плотность потока энергии (ППЭ) — энергия, проходящая через 1 см2 поверхности, перпендикулярной к направлению распространения ЭМ-волны за 1 с.
За единицу ППЭ принимается Вт/м2 (мВт/м2 , мкВт/м2 ).
Для контроля уровней электромагнитного излучения используются измерители напряженности поля и измерители плотности потока энергии (величина, пропорциональная квадрату напряженности поля).
Измерение напряженности ЭМП на рабочем месте проводят на расстоянии 30 см от центра экрана и со всех сторон дисплея на расстоянии 5 см от излучающих поверхностей.
Во время проведения измерений расстояние между измеряющим и зондом (или антенной) должно быть не менее 0,8 м. На это же расстояние должны быть удалены токоведущие предметы.
Порядок проведения измерений и обработки полученных результатов с учетом поправочных коэффициентов амплитудно-частотной характеристики и температуры окружающей среды осуществляется в соответствии с техническим описанием используемого прибора.
Заключение о соответствии рабочего места требованиям безопасности по ЭМП принимается, если около дисплея и на расстоянии 30 см от излучающей поверхности напряженность ЭМП по электрической магнитной составляющей соответствует нормам, а время — требованиям в зоне ЭМП — 8 ч.
Если время пребывания меньше, то величина предельно допустимого значения напряженности пересчитывается по формулам:
 , (5.1)
, (5.1)
 , (5.2)
, (5.2)
где ЕПД , HПД – предельно допустимая напряженность ЭМ и МП соответственно в В/м и А/м; ЭНЕПД и ЭННПД – предельные значения энергетической нагрузки за рабочий день по электрической и магнитной составляющим и равным соответственно для частот 0,06 – 3,0 МГц 20000 (В/м)2 ·ч и 200 (А/м)2 ·ч; Т – время воздействия, ч.
Энергетическая нагрузка (ЭН) электромагнитного поля в диапазоне частот 0,3 – 300 ГГц определяется по формуле:
![]() , (5.3)
, (5.3)
где ЭНПД – предельно допустимая ЭН, Вт·ч/м2 , (мкВт·ч/м2 ); ППЭ – плотность потока энергии, Вт/м2 ; Т – время пребывания в зоне облучения за рабочую смену, ч; К – коэффициент ослабления биологической эффективности, К = 1 для всех случаев воздействия, исключая облучение от вращающихся и сканирующих антенн.
Рассчитаем предельно допустимые значения напряженностей ЭМП и МП, учитывая, что продолжительность непрерывной работы с ВДТ без регламентированного перерыва не должна превышать 2 часов, а частота электромагнитного излучения находится в пределах 0,06 – 3,0 МГц. Подставляя приведенные значения в выражения (5.1) и (5.2), получим:
 ,
,
 .
.
В целях защиты от электромагнитных и электростатических полей предлагается применение приэкранных фильтров, специальных экранов и других средств индивидуальной защиты, прошедших испытания в аккредитованных лабораториях и имеющих соответствующий гигиенический сертификат.
Конструкция ВДТ и ПЭВМ должна обеспечивать мощность экспозиционной дозы рентгеновского излучения в любой точке на расстоянии 0,05 м от экрана и корпуса ВДТ при любых положениях регулировочных устройств не должна превышать 7,7410–12 А/кг, что соответствует эквивалентной дозе, равной 0,1 мбэр/час (100 мкР/час).
5.2.5 Электробезопасность
Практически все оборудование вычислительных центров относится к электрическим установкам, которые представляют собой большую потенциальную опасность.
Персональный компьютер питается напряжением 220В/50Гц, которое превышает безопасный предел 42 В. Следовательно возникает опасность поражения электрическим током.
Воздействие на человека электрического тока приводит к общим травмам (электроудары) и местным (ожоги, металлизация кожи, электрические знаки, электроофтальмия, механические повреждения). Опасность прикосновения человека к токоведущим частям электроустановки определяется величиной протекающего через тело человека тока.
Как показывает анализ случаев электротравматизма, чаще всего встречается однофазное прикосновение в изолированных и глухо-заземленных сетях.
Для предотвращения электротравматизма недостаточно только организационных мер; здесь требуются также технические меры: защитное заземление, зануление, защитное отключение и т. д.
Специфическая опасность электроустановок: токоведущие проводники, корпуса стоек ЭВМ и прочего оборудования, оказавшегося под напряжением в результате повреждения (пробоя) изоляции, не подают каких-либо сигналов, которые предупреждают человека об опасности. Реакция человека на электрический ток возникает лишь при протекании последнего через тело человека. Исключительное значение для предотвращения электротравматизма имеет правильная организация обслуживания действующих электроустановок, проведения ремонтных, монтажных и профилактических работ. При этом под правильной организацией понимается строгое выполнение ряда организационных и технических мероприятий и средств, установленных действующими “Правилами технической эксплуатации электроустановок потребителей и правила техники безопасности при эксплуатации электроустановок потребителей” (ПТЭ и ПТБ потребителей) и “Правила установки электроустановок” (ПУЭ).
Разрядные токи статического электричества чаще всего возникают при прикосновении к любому из элементов ЭВМ. Такие разряды особой опасности для человека не представляют, но кроме неприятных ощущений они могут привести к выходу из строя ЭВМ. Для снижения величины возникающих зарядов статического электричества покрытие технологических полов следует выполнять из однослойного поливинилхлоридного антистатического линолеума.
Другим методом защиты является нейтрализация заряда статического электричества ионизированным газом. В промышленности широко применяются радиоактивные нейтрализаторы. К общим мерам защиты от статического электричества можно отнести общее и местное увлажнение воздуха.
Установка и монтаж оборудования АРМ должно осуществляться в соответствии с Правилами установки электрооборудования ПУЭ-85 и ГОСТ 12.3.032-84.
5.2.6 Дисплейные терминалы и ПЭВМ в составе АРМ
Визуальные эргономические параметры ВДТ являются параметрами безопасности и их неправильный выбор приводит к ухудшению здоровья пользователей.
Все ВДТ должны иметь гигиенический сертификат, включающий в том числе оценку визуальных параметров.
Конструкция ВДТ, его дизайн и совокупность эргономических параметров должны обеспечивать надежное и комфортное считывание отображаемой информации в условиях эксплуатации, соответствующих разделу 5 СанПиН 2.2.2.542-96.
Конструкция ВДТ должна обеспечивать возможность фронтального наблюдения экрана путем поворота корпуса в горизонтальной плоскости вокруг вертикальной оси в пределах ±30 градусов и в вертикальной плоскости вокруг горизонтальной оси в пределах ±30 градусов с фиксацией в заданном положении.
Предполагается, что дизайн ВДТ предусматривает окраску корпуса в спокойные мягкие тона с диффузным рассеиванием света. Корпус ВДТ и ПЭВМ, клавиатура и другие блоки и устройства ПЭВМ должны иметь матовую поверхность одного цвета с коэффициентом отражения 0,4 – 0,6 и не иметь блестящих деталей, способных создавать блики.
На лицевой стороне корпуса ВДТ не рекомендуется располагать органы управления, маркировку, какие-либо вспомогательные надписи и обозначения. При необходимости расположения органов управления на лицевой панели они должны закрываться крышкой или быть утоплены в корпусе.
Для обеспечения надежного считывания информации при соответствующей степени комфортности ее восприятия должны быть определены оптимальные и допустимые диапазоны визуальных эргономических параметров. Визуальные эргономические параметры ВДТ и пределы их изменений, в которых должны быть установлены оптимальные и допустимые диапазоны значений, приведены в Приложении 1 СанПиН 2.2.2.542-96.
Оптимальные и допустимые значения визуальных, эргономических параметров должны быть указаны в технической документации на ВДТ для режимов работы пользователей, указанных в разделе 5 СанПиН 2.2.2.542-96. В технической документации на ВДТ должны быть также установлены требования на визуальные параметры (дополнительно к параметрам, перечисленным в Приложении 1 СанПиН 2.2.2.542-96), соответствующие действующим на момент разработки или импорта ГОСТ и признанным в Российской Федерации международным стандартам.
Конструкция ВДТ должна предусматривать наличие ручек регулировки яркости и контраста, обеспечивающие возможность регулировки этих параметров от минимальных до максимальных значений.
Для обеспечения должной эргономичности, следует выбирать клавиатуру, конструкция которой предусматривает:
- исполнение в виде отдельного устройства с возможностью свободного перемещения;
- опорное приспособление, позволяющее изменять угол наклона поверхности клавиатуры в пределах от 5 до 15 градусов;
- высоту среднего ряда клавиш не более 30 мм;
- расположение часто используемых клавиш в центре, внизу и справа, редко используемых - вверху и слева;
- выделение цветом, размером, формой и местом расположения функциональных групп клавиш;
- минимальный размер клавиш — 13 мм, оптимальный — 15 мм;
- клавиши с углублением в центре и шагом 19 плюс-минус 1 мм;
- расстояние между клавишами не менее 3 мм;
- одинаковый ход для всех клавиш с минимальным сопротивлением нажатию 0,25 Н и максимальным — не более 1,5 Н;
- звуковую обратную связь от включения клавиш с регулировкой уровня звукового сигнала и возможности ее отключения.
5.2.7 Организация и оборудование рабочих мест с ВДТ и ПЭВМ
Для комфортной работы людей, рабочие места необходимо оборудовать с учетом современных эргономических требований. Конструкция рабочей мебели (столы, кресла и стулья) должна обеспечивать возможность индивидуальной регулировки соответственно росту работающего и создавать удобную позу. Часто используемые предметы и органы управления должны находится в оптимальной рабочей зоне.
Конструкция рабочего стола должна обеспечивать оптимальное размещение на рабочей поверхности используемого оборудования с учетом его количества и конструктивных особенностей, характера выполняемой работы. При этом допускается использование рабочих столов различных конструкций, отвечающих современным требованиям эргономики.
С учетом норм и требований, изложенных в СанПиН 2.2.2.542–96, ст. 8.2 предлагается использовать следующие рекомендации: поверхности стола должна регулироваться в пределах 680–800 мм; при отсутствии такой возможности высота рабочей поверхности стола должна составлять 725 мм. Модульными размерами рабочей поверхности стола для ВДТ и ПЭВМ следует считать: ширину 1200 мм, глубину 1000 мм при нерегулируемой его высоте, равной 725 мм.
Рабочий стол должен иметь пространство для ног высотой не менее 600 мм, шириной — не менее 500 мм, глубиной на уровне колен — не менее 450 мм и на уровне вытянутых ног — не менее 650 мм.
Предлагается использовать подъемно-поворотный рабочий стул (кресло), конструкция которого позволяет регулировать по высоте и углам наклона сиденья и спинки, а также расстояние спинки от переднего края сиденья.
Конструкция его должна обеспечивать:
- ширину и глубину поверхности сиденья не менее 400 мм;
- поверхность сиденья с закругленным передним краем;
- регулировку высоты поверхности сиденья в пределах 400–550 мм и углам наклона вперед до 15 град, и назад до 5 град.;
- высоту опорной поверхности спинки 300 плюс-минус 20 мм, ширину — не менее 380 мм и радиус кривизны горизонтальной плоскости — 400 мм;
- угол наклона спинки в вертикальной плоскости в пределах 0 плюс-минус 30 градусов;
- регулировку расстояния спинки от переднего края сиденья в пределах 260–400 мм;
- стационарные или съемные подлокотники длиной не менее 250 мм и шириной — 50–70 мм;
- регулировку подлокотников по высоте над сиденьем в пределах 230 плюс-минус 30 мм и внутреннего расстояния между подлокотниками в пределах 350–500 мм.
Рабочее место предлагается оборудовать подставкой для ног, имеющей ширину не менее 300 мм, глубину не менее 400 мм, регулировку по высоте в пределах до 150 мм и по углу наклона опорной поверхности подставки до 20 градусов. Поверхность подставки должна быть рифленой и иметь по переднему краю бортик высотой 10 мм.
Клавиатуру следует располагать на поверхности стола на расстоянии 100–300 мм от края, обращенного к пользователю или на специальной, регулируемой по высоте рабочей поверхности, отделенной от основной столешницы.
5.2.8 Требования к организации режима труда и отдыха при работе на АРМ
Режимы труда и отдыха при работе с АРМ необходимо организовывать в зависимости от вида и категории трудовой деятельности.
Продолжительность обеденного перерыва определяется действующим законодательством о труде и Правилами внутреннего трудового распорядка предприятия.
Для обеспечения оптимальной работоспособности и сохранения здоровья оператора АРМ, на протяжении рабочей смены рекомендуется устанавливать регламентированные перерывы.
Время регламентированных перерывов в течение рабочей смены следует устанавливать в зависимости от ее продолжительности, вида и категории трудовой деятельности (приложение 15 СанПиН 2.2.2. 542-96).
Продолжительность непрерывной работы с АРМ без регламентированного перерыва не должна превышать 2 часов.
При работе с АРМ в ночную смену (с 22:00 до 6:00 часов), независимо от категории и вида трудовой деятельности, продолжительность регламентированных перерывов необходимо увеличить на 60 минут.
Во время регламентированных перерывов с целью снижения нервно-эмоционального напряжения, утомления зрительных анализаторов, предотвращения познотонического утомления целесообразно выполнять комплексы упражнений, изложенные в Приложении 16-18 СанПиН 2.2.2. 542-96.
С целью уменьшения отрицательного влияния монотонии целесообразно применять чередование операций осмысленного текста и числовых данных, чередование редактирования текста и ввода данных (изменение содержания работы).
В случаях возникновения у работающих с АРМ зрительного дискомфорта и других неблагоприятных субъективных ощущений, несмотря на соблюдение санитарно-гигиенических, эргономических требований, режимов труда и отдыха, необходимо проводить коррекцию длительности перерывов для отдыха или смену деятельности на другую, не связанную с использованием АРМ.
Работающим на АРМ с высоким уровнем напряженности во время регламентированных перерывов и в конце рабочего дня показана психологическая разгрузка в специально оборудованных помещениях (комната психологической разгрузки).
Комплексная реализация проекта в форме АРМ с учетом сформулированных выше требований охраны труда гарантирует обеспечение безопасных и безвредных условий труда персонала в соответствии с ССБТ, другими действующими трудоохранными нормами и правилами.
5.3 Устойчивость проекта к чрезвычайным ситуациям
В данном разделе осуществляется анализ устойчивости проектного решения к(в) ЧС.
По ГОСТ 22.0.05–94 чрезвычайные ситуации делятся на ЧС мирного и военного времени. На сегодняшний день геополитическая обстановка такова, что ЧС военного времени сравнительно маловероятны. ЧС мирного времени могут вызываться природными и антропогенными факторами. Вероятность возникновения ЧС, вызванной природными, факторами достаточно мала. Это обусловлено особенностями местности Ростовской области, поэтому никаких специальных предупредительных мероприятий в этом случае не требуется.
К вероятным антропогенным ЧС можно отнести пожар, поражение оператора электротоком. Для обеспечения устойчивости автоматизированного рабочего места (АРМ) к ЧС такого характера необходимо соблюдение НПБ 105-95, ГОСТ 12.1.004-91, ПУЭ-85 и ГОСТ 12.3.032-84.
В помещениях с АРМ присутствуют все три фактора, необходимые для возникновения пожара: горючие материалы, доступ кислорода и источники зажигания. Горючими материалами являются перегородки, двери, полы, материалы эстетической отделки помещения, изоляция различного рода кабелей и т.д. Доступ кислорода обеспечивается системами вентиляции и кондиционирования, а источниками зажигания могут оказаться устройства электропитания, сами системы кондиционирования, электронные схемы ЭВМ. Таким образом, помещения с АРМ по пожарной опасности относятся к категории “В”. Исходя из этого, помещения должны быть спроектированы с II степенью пожароустойчивости.
В соответствии с приложением 3 ППБ–01–93, помещения должны оборудоваться огнетушителями. При оборудовании помещений первичными средствами пожаротушения следует учитывать физико-химические и пожароопасные свойства горючих веществ, их отношение к огнетушащим веществам, а также площадь производственных помещений и установок. В соответствии с выше сказанным, помещения вычислительных центров рекомендуется оборудовать хладоновыми и углекислотными огнетушителями с учетом предельно допустимой концентрации огнетушащего вещества.
Для помещений данной категории (“В”), огнетушители рекомендуется размещать на расстоянии не превышающем 30 метров от возможного очага возгорания.
Помещения, оборудованные автоматическими стационарными установками пожаротушения, обеспечиваются огнетушителями на 50%, исходя из их расчетного количества.
5.4 Экологичность проекта
Экологичность производства — это комплексная характеристика, отражающая уровень ресурсных затрат на производство единицы востребованной потребителями товаров, работ и услуг.
Данный программный продукт предназначен для получения рабочих параметров математической модели, которые в дальнейшем могут быть использованы для настройки реальных электронных устройств слежения и управления (УСиУ) на основе двигателей постоянного тока (ДПТ). Таким образом, данный проект не связан с потенциально вредным производством и не угрожает экологической обстановке окружающей среды. Но благодаря данной разработке и при условии внедрения ее в производство, уровень энергозатрат снизится, что, в свою очередь, повысит экологичность данного производства.
5.5 Выводы
Анализ проектного решения на устойчивость к(в) ЧС показал, что и АРМ, и регулируемое производство при соблюдении установленных требований и правил не представляет опасности при возникновении ЧС различного характера.
В проекте были предусмотрены ряд дополнительных мер, направленных на обеспечение безопасности и комфортности работы на автоматизированном рабочем месте (АРМ), а также в производстве.
Таким образом, проанализировав все факторы, с уверенностью можно сказать, что внедрение данной разработки в производство обеспечивает требуемый уровень трудоохранных мер, при условии проведения всех указанных мероприятий и соблюдении норм и требований; повысит совокупную экологичность хозяйственной деятельности за счет снижения энергозатрат, и не будет сопровождаться снижением устойчивости при возникновении вероятностных ЧС.
Заключение
Целью данной работы ставилось создание математической модели системы слежения РЛС.
Для построения данной системы использовался принцип максимума Понтрягина. [1] В работе описаны основные принципы функционирования системы оптимального управления, был смоделирован привод антенны на основе экспериментальных данных, полученных при проведении исследований динамических характеристик и параметров привода РЛС в ООО НПО «Горизонт» [3].
В работе разработан общий алгоритм функционирования, на основе которого получены данные для смоделированного привода РЛС. Для сравнительной характеристики была взята система регулирования привода РЛС, построенная на основе ПИД-регулятора. В результате анализа полученных данных установлено, что смоделированная система дает выигрыш в быстродействии более чем в пять раз, по сравнению с существующей системой.
Полученная система адаптирована для применения в микроконтроллерах, что придает ей гибкость и простоту в модификации. Таким образом, данная система является более быстродействующей и удобной для применения по сравнению с существующими аналогами, построенными на основе стандартных регуляторов.
Приложение
Блок-схема файл-функции OPTIMUM_CONTR
Блок-схема общего алгоритма функционирования программы.
![]()
Блок-схема подпрограммы u_calc().
![]()
| № строки |
Формат |
Обозначение |
Наименование |
Кол. листов |
№ экз. |
Примечание |
| Документация |
||||||
| 1 |
А4 |
2101.770000.000ПЗ |
Пояснительная записка |
1 |
||
| Прочая документация |
||||||
| 2 |
А1 |
2101.770000.000Д1 |
1 |
1 |
||
| 3 |
А1 |
2101.770000.000Д2 |
1 |
1 |
||
| 4 |
А1 |
2101.770000.000Д3 |
1 |
1 |
||
| 5 |
А1 |
2101.770000.000Д4 |
1 |
1 |
||
| 6 |
А1 |
2101.770000.000Д5 |
1 |
1 |
||
| 7 |
А1 |
2101.770000.000Д6 |
1 |
1 |
||