Обобщенная структура системы управления
СОДЕРЖАНИЕ: Алгоритм функционирования управляющего устройства. Система управления как совокупность управляемого объекта и управляющего устройства, ее обобщенная структура. Понятие технологического объекта управления. Этапы циркуляции информации в процессе управления.Устройство (или совокупность устройств), осуществляющее технологический процесс и нуждающееся в специально организованных воздействиях извне для осуществления его алгоритма функционирования, называется управляемым объектом.
Алгоритм управления - совокупность предписаний, определяющая характер воздействий извне на управляемый объект с целью осуществления его алгоритма функционирования.
Управление - процесс осуществления воздействий, соответствующих алгоритму управления. Обычно управление не может полностью компенсировать влияние возмущений в каждый момент времени и поэтому алгоритм функционирования управляемого объекта выполняется лишь приближенно.
Устройство, осуществляющее в соответствии с алгоритмом управления воздействие на управляемый объект, называется управляющим устройством. Алгоритм функционирования управляющего устройства и есть алгоритм управления.
Совокупность управляемого объекта и управляющего устройства, взаимодействующих между собой, называют системой управления. В одной системе может быть несколько управляемых объектов или управляющих устройств.
Технологический процесс - совокупность последовательных и параллельных операций, направленных на достижение требуемого производственного результата.
Совокупность технологического процесса и реализующего его оборудования называют технологическим объектом управления.
Процесс управления можно разделить на четыре этапа циркуляции информации:
получение информации;
переработка информации (принятие правильного решения, влияющего на ход процесса);
использование информации (изменение хода производственного процесса в нужном направлении);
передача информации (этап в каждом “цикле” управления повторяется дважды).
В соответствии с указанными этапами технические средства систем управления можно подразделить на четыре группы:
средства получения (формирования) информации: датчики, сенсоры, измерительные приборы и т.п. (КИП);
средства передачи информации на расстояние: системы телемеханики (СТМ), в более общем случае - системы передачи информации (СПИ);
средства переработки информации: устройства вычислительной техники (УВТ) и другие специализированные устройства;
средства для использования информации: автоматические регуляторы, исполнительные механизмы (ИМ).

Рис.1. Обобщенная структура системы управления
Структура современной системы управления производством на примере системы управления угольной шахты приведена на рис. 2.
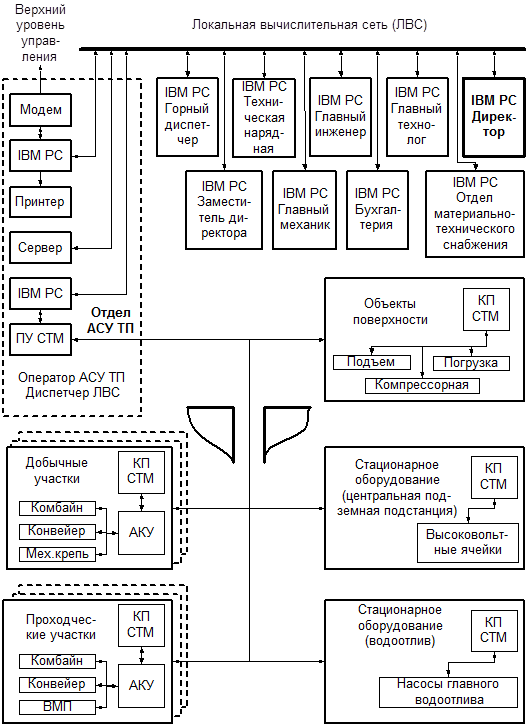
Рис.2. Структура современной системы управления производством на примере системы управления угольной шахты
ПУ СТМ - пункт управления системы телемеханики; КП СТМ - контролируемый пункт системы телемеханики; АКУ - аппаратура контроля и управления оборудованием; ВМП - вентилятор местного проветривания.
Первичные преобразователи или датчики используются для получения сигналов, которые далее могут обрабатываться в электронных схемах, кодироваться с помощью АЦП, запоминаться и анализироваться компьютерами.
Если исследуемый (получаемый) сигнал настолько мал, что его маскируют шумы и помехи, то используются мощные методы выделения частот сигнала, такие, как синхронное детектирование, усреднение сигналов, многоканальные счетчики, а также корреляционный и спектральный анализы, с помощью которых требуемый сигнал восстанавливается.
Применяемые в промышленности датчики подразделяются на два больших класса: дискретные и аналоговые.
В дискретных датчиках выходной сигнал может иметь только два значения (например, “включено - “выключено” и т.д.), а в аналоговых присутствует весь спектр измеряемой величины.
Существуют датчики аналоговые по принципу измерения, но дискретные по виду выходного сигнала. Это имеет место, когда для функционирования системы не обязательно иметь информацию о всех значениях какой-либо величины, а достаточно знать, превышает эта величина заданное (например, аварийное) значение или нет.
Все датчики подразделяются на контактные и бесконтактные по типу “съема” сигнала с объекта. Например, измерение силы электрического тока может быть произведено с помощью обычного амперметра, который включается в разрыв электроцепи, а также прибором, использующим эффект Холла, который реагирует на магнитное поле, создаваемое протекающим по проводнику током.
Пример простейшего дискретного датчика - датчик уровня жидкости, который сам по себе является контактом, который замкнут, если находится ниже уровня жидкости и разомкнут, если выше.
Дискретные датчики имеют либо релейный выход (контакт замкнут или разомкнут), либо ключевой, обычно полупроводниковый (ключ открыт или закрыт).
Аналоговые датчики можно подразделить на измеряющие электрические и неэлектрические величины.
К первой группе относятся измерители тока, напряжения, мощности, количества эл. энергии и т.д.
Наиболее широко распространенными представителями второй группы являются измерители температуры, уровня светимости, магнитного поля, усилия, перемещения, скорости и т.д.
Датчики температуры.
Термопары.
При соединении между собой двух проводов из различных металлов на их концах возникает небольшая разность потенциалов обычно около 1 мВ с температурным коэффициентом около 50 мкВ/°С. Такие соединения называют термопарами. Комбинируя различные пары сплавов, можно измерять температуры от - 270 до +2500°С с точностью 0,5 - 2°С. Каждая пара изготовляется путем сварки (спайки) двух разных металлов таким образом, чтобы получилось небольшое по размеру соединение - спай. Типичные термопары: J - железо - константан (55% Cu - 45% Ni); Т - медь - константан; R - платина - 87% Pt - 13% Rh и т.п. Всего различают 7 основных типов термопар.
Термисторы - полупроводниковые устройства, у которых температурный коэффициент сопротивления (ТКС) » - 4%/°С. Диапазон от - 50 до+300°С. Точность 0,1 - 0,2°С. Обычно имеют сопротивление несколько сотен Ом при комнатной температуре. Не предъявляют высоких требований к последующим электрическим схемам. Наиболее часто применяется мостовая схема подключения термистора в сочетании с дифференциальным усилителем.
Термисторный метод измерения по сравнению с другими проще и точнее, но термисторы чувствительны к саморазогреву, хрупки и пригодны для относительно узкой области температур.
Платиновые термометры сопротивления представляют собой просто катушку из очень чистой платиновой проволоки с положительным ТКС » 0,4%/°С. Чрезвычайно стабильны во времени, точны (0,02 - 0,2°С), имеют широкий диапазон измерения (от - 200 до +1000°С), но стоимость их высока.
Датчики температуры на ИС. Падение напряжения на полупроводниковом p-n переходе также зависит от температуры. В настоящее время выпускаются интегральные микросхемы, использующие этот эффект, с токовым, потенциальным либо частотным выходом. Типовой диапазон от - 55 до +125°С, точность ± 1°С, отличаются простотой внешних соединений.
Кварцевые термометры используют эффект изменения резонансной частоты кристалла кварца со специально подобранным сечением (типовые кварцевые генераторы имеют самый низкий ТК). Отдельные образцы таких датчиков имеют погрешность 410-5 °С в диапазоне от - 50 до +150°С.
Бесконтактное или дистанционное измерение температуры возможно с помощью пирометров и термографов. Удобно для измерения температуры очень горячих объектов или же объектов, расположенных в недоступных местах.
Деформация и смещение (положение, усилие).
Измерение таких физических переменных, как положение и усилие, само по себе достаточно сложно, и прибор для измерения этих величин должен включать в себя такие устройства, как тензодатчик, дифференциальный преобразователь линейных перемещений (ДПЛП) и т.д. Основным здесь является измерение перемещения.
Существует несколько наиболее часто используемых методов измерения положения, смещения (изменение положения) и деформации (относительного удлинения).
ДПЛП строятся в виде трансформаторов с подвижным сердечником, в которых возбуждается переменным током одна обмотка и измеряется индуцированное напряжение во второй обмотке.
Тензодатчики измеряют удлинение и (или) изгиб сборки из четырех металлических тонкопленочных резисторов, подвергаемой деформации. Электрическая схема тензодатчиков подобна мостовой: на два противоположно расположенных зажима подается постоянное напряжение, а с двух других снимается разность потенциалов.
Емкостные преобразователи. Очень чувствительный метод измерения перемещений реализуется с помощью двух близко расположенных друг к другу пластин или одной пластины, заключенной между парой внешних пластин. Включив такой конденсатор в резонансную схему, можно измерить очень малые изменения положения. Емкостные микрофоны используют этот принцип для преобразования акустического давления или скорости его изменения в электрический сигнал звуковой частоты.
Измерение углов поворота объекта производится с помощью специальных модификаций ДПЛП или синусно-косинусных преобразователей. В обоих случаях используется возбуждение переменным током, и угловое положение измеряется с точностью до угловой минуты.
Измерение положения с высокой точностью (1 мкм) можно проводить, используя отражение лазерного луча от зеркал, скрепленных с объектом, и считывая число интерференционных полос (интерферометрия).
Кварцевые кристаллы откликаются на деформацию изменением своей резонансной частоты. Этим обеспечивается очень точный метод измерения малых смещений или изменений давления.
Описанные методы позволяют измерять скорость, ускорение, давление, силу (массу).
В промышленности и бытовой технике широко используется оптико-механический способ измерения перемещения и скорости. Он основан на применении оптопары (фотодиод-светодиод или оптрон с открытым каналом) и диска с лепестками, приводимого во вращение поверхностью объекта, скорость перемещения которого необходимо измерить.
С помощью измерения магнитных полей возможно “бесконтактное” измерение силы тока и других производных величин. Такие датчики основаны на эффекте Холла, который вызывает появление поперечного напряжения на токонесущем куске материала (обычно это полупроводник), помещенном в магнитное поле.
Измерить частоту, период колебаний или временной интервал с высокой степенью точности достаточно просто имея генератор эталонной частоты и несложную цифровую схему обработки.
Измерение уровня излучения в настоящее время осуществляется в основном полупроводниковыми приборами - фотосопротивлениями, фотодиодами, фототранзисторами, и основано на эффекте возникновения фототока при попадании света (потока фотонов) на обратно смещенный р-n переход.
В обычных фотодиодах преобразование световой энергии в электрический ток происходит без усиления, а в лавинных фотодиодах и фототранзисторах - с усилением.
В промышленных системах управления важным элементом являются устройства гальванической развязки. Они реализуются чаще всего на базе трансформаторов или оптронов (оптронная развязка).
Оптрон - оптическая пара, состоящая из светодиода и фотодиода (фототранзистора, фототиристора), заключенных в одном корпусе.
Оптронная развязка обладает лучшими характеристиками, меньшими габаритами и стоимостью, чем трансформаторная.
Гальваническая развязка используется для повышения безопасности, помехоустойчивости и надежности аппаратуры.
Важнейшим элементом систем являются ЦАП и АЦП.
Цифро-аналоговый преобразователь (ЦАП) представляет собой устройство для автоматического декодирования входных величин, представленных числовыми кодами (цифровых сигналов), в непрерывные во времени сигналы, необходимые для работы с аналоговыми устройствами.
Аналого-цифровой преобразователь (АЦП) представляет собой устройство для автоматического преобразования непрерывно изменяющихся во времени аналоговых сигналов в эквивалентные значения числовых кодов.
Современные СПИ представляют собой сложные комплексы, состоящие из различных функционально взаимосвязанных элементов. Эти системы характеризуются не только большим числом элементов, но и иерархичностью структуры, избыточностью, наличием между элементами прямых, обратных и перекрестных связей.
Обобщенная модель СПИ
 А S X A
А S X A
Источник Передатчик Канал Приемник Получатель
![]() сообщений сообщений
сообщений сообщений
f (t)
(шум)
Канал (в узком смысле) - среда, используемая для передачи сигналов от передатчика к приемнику.
Передатчик - устройство, преобразующее сообщения источника А в сигналы S, наиболее соответствующие характеристикам данного канала. Операции, выполняемые передатчиком, могут включать в себя формирование первичного сигнала, модуляцию, кодирование, сжатие данных, и т.д.
Приемник реализует функцию обработки сигналов X (t) = S (t) + f (t) на выходе канала с целью наилучшего воспроизведения (восстановления) переданных сообщений А на приемном конце.
Типичные виды передаваемых сигналов:
1) сигналы телемеханики (данные);
2) речевые (звуковые) сигналы;
3) видеосигналы.
Тип канала связи определяет в большинстве случаев тип, назначение, область применения и основные характеристики СПИ.
1) проводные каналы - информация передается по электрическим кабелям различного типа:
телефонная пара - используется при невысоких требованиях к пропускной способности канала и помехоустойчивости, наиболее дешевый вид кабеля;
витая пара - кабель состоит из попарно свитых проводников, что снижает удельную емкость, а следовательно, увеличивает полосу пропускания;
коаксиальный кабель - сигнальный провод расположен строго по оси кабеля (аксиально), а общий провод - вокруг него, выполняя еще и функцию экрана, причем отделен от сигнального диэлектриком на определенное расстояние, что значительно снижает удельную емкость и повышает помехоустойчивость. Коаксиальные кабели обладают наибольшей пропускной способностью по сравнению с предыдущими типами (сотни МГц), но значительно дороже.
силовая сеть электроснабжения - используется в качестве канала связи при невысоких требованиях к пропускной способности или когда прокладка отдельной линии связи невозможна либо нецелесообразна. Требует довольно сложных устройств присоединения к каналу.
2) радиоканал - информация передается путем распространения электромагнитных колебаний в свободной среде. Очень широкая область применения: промышленность, телефонная связь, телевидение, радиовещание, спутниковая связь и т.д. Требует значительных затрат при создании передающих станций для передачи на большие расстояния, поэтому обычно применяется при большом количестве абонентов.
3) оптический канал - может быть открытым и световодным.
открытый оптический канал - информация передается световыми сигналами через атмосферу, в настоящее время практически не имеет применения из-за зависимости характеристик от состояния атмосферы.
канал связи на волоконных световодах - световой поток распространяется по специально организованному каналу - световоду.
Волоконно-оптическая связь - самая новая отрасль в области СПИ, и наиболее перспективная во многих применениях, особенно в промышленности.
В качестве среды распространения световых колебаний используются волоконные световоды, светопроводящий слой (сердцевина) которых выполнен из кварца с очень высокой прозрачностью (в десятки тысяч раз прозрачнее обычного оконного стекла), а оболочка - из полимерных материалов, несущих защитную функцию. Сердцевина, в свою очередь, выполняется двухслойной, причем коэффициент преломления внешней части отличается от коэффициента преломления внутренней. За счет этого световой поток, попадающий в световод, многократно отражается от границы раздела слоев и таким образом проходит через световод.
Волоконно-оптические системы передачи (ВОСП), базирующиеся на применении волоконных световодов, обладают следующими основными преимуществами по сравнению с другими системами:
невосприимчивость к электромагнитным помехам (особое значение имеет для применения в промышленности с опасными условиями);
высокая пропускная способность и дальность передачи;
малые габариты и масса кабеля;
отсутствие ценных материалов в кабеле;
полная гальваническая развязка между приемной и передающей частями;
практически невозможность несанкционированного доступа в физический канал связи, и многие другие.
Различают системы местного и дистанционного управления (телеуправление). Последние имеют место, когда производственный процесс рассредоточен на большой площади. Это имеет место в системах управления крупными предприятиями: металлургические заводы, предприятия горнодобывающей, химической и других отраслей промышленности, а также на объектах управления большой протяженности - нефтепроводы, линии электропередачи и т.д. В системах местного управления объекты управления обычно расположены компактно и на незначительном расстоянии от управляющего устройства. Например, металлообрабатывающие станки с ЧПУ, подъемные краны и т.д. В этом случае специализированные СПИ не используются.
Существуют автоматические и автоматизированные системы управления.
Система управления, в которой все функции управления процессом перекладываются с человека на автоматические устройства, называется автоматической системой управления.
В автоматизированной системе управления функции управляющего устройства выполняют как средства вычислительной техники, так и человек.
Системы управления могут быть классифицированы и по другим самым различным признакам. Классификация по алгоритмическим и неалгоритмическим признакам приведена на рис 3.

Рис.3. Классификация систем управления по алгоритмическим и неалгоритмическим признакам
Литература
1. Стехин А.П. Основы конструирования, моделирования и проектирования систем управления производственными процессами: Учеб. пособие. - Донецк: ДонГАУ, 2008.
2. Лукас В.А. Основы теории автоматического управления. - М.: “Недра”, 1977.
3. Основы теории оптимального управления: Учеб. Пособие для эконом. Вузов / В.Ф. Кротов, Б.А. Лагоша, С.М. Лобанов и др.; Под ред. В.Ф. Кротова. - М.: Высш. Шк., 2008.
4. Иванилов Ю.П., Лотов А.В. Математические модели в экономике. - М.: “Наука”, 2007