Расчет максимального значения восстанавливающей силы
СОДЕРЖАНИЕ: Методы расчета максимального перемещения буфера, масса которого мала по сравнению с массой вагона, движущегося в направлении тупика. Определение максимального значения восстанавливающей силы и времени, за которое эта сила достигнет максимального значения.Сибирский государственный университет путей сообщения
Домашнее задание по дисциплине «Математическое моделирование»
Задачи №1, №2
Разработал: студент гр. М-511
Ревнивцев
2008
Задача№1
В тупике железнодорожного пути установлен буфер (рисунок 1), имеющий упругий элемент с нелинейной жесткостью, восстанавливающая сила которого изменяется по закону
![]() .
.
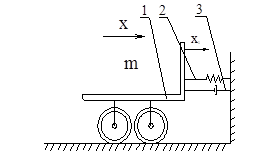
1 – вагон; 2 – буфер; 3 – демпфер
Рисунок 1 – Схема к решения задачи.
В направлении тупика движется вагон массой m и скоростью X. При столкновении вагона с упругим элементом, последний смещается на величину X1. В задаче также приняты следующие допущения: 1) масса буфера мала по сравнению с массой вагона; 2) после удара контакт между этими объектами сохраняется.
Восстанавливающая сила (закон изменения):
![]() (1)
(1)
В задаче требуется определить:
- максимальное перемещение буфера;
- максимальное значение восстанавливающей силы;
- время, за которое восстанавливающая сила достигнет максимального значения.
На данную систему (рисунок 1) действуют силы: сила инерции движущегося вагона; сила демпфирования (или сила вязкого трения), пропорциональная скорости движения вагона; а также восстанавливающая сила упругого элемента-демпфера.
Сила инерции:
![]() , (2)
, (2)
Сила демпфирования:
![]() , (3)
, (3)
Сила упругости:
![]() (4)
(4)
Для решения поставленной задачи следует решить обыкновенное дифференциальное уравнение второго порядка вида:
![]() (5)
(5)
Заменим уравнение (5) системой уравнений первого порядка, для этого введем новую неизвестную функцию ![]() и перепишем исходное уравнение, представив его в виде системы из двух уравнений:
и перепишем исходное уравнение, представив его в виде системы из двух уравнений:
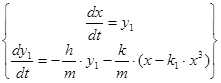 (6)
(6)
Решение проводим в системе MathCad с построением графических зависимостей: 1) скорости движения вагона от времени; 2) перемещения буфера от времени; 3) восстанавливающей силы от времени. Неизвестные выше исходные данные записываются непосредственно в программе.
Исходное уравнение имеет вид:
![]() , (7)
, (7)
где ![]() - коэффициент демпфирования,
- коэффициент демпфирования, ![]() ;
;
![]() - масса вагона, кг;
- масса вагона, кг;
![]() - жесткость упругого элемента, Н/м;
- жесткость упругого элемента, Н/м;
![]() - численный коэффициент,
- численный коэффициент, ![]() ;
;
![]() - скорость вагона при подходе к тупику, м/с;
- скорость вагона при подходе к тупику, м/с;
Начальные условия:
![]()
![]()
 (8)
(8)
Уравнение (8) решается в системе MathCad посредствам встроенной функцией – rkfixed:
Z:= rkfixed (y, 0, t, n. D) (9)
где Z – вектор неизвестных;
y – вектор начальных условий;
0 и t – интервал, на котором ищется решение;
n – количество точек на интервале.
В ходе вычислений получена следующая система ответов:
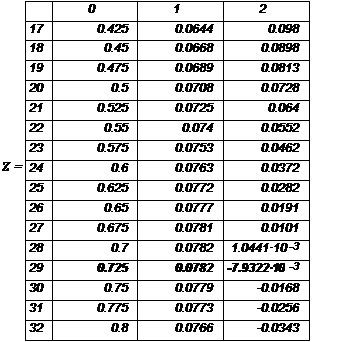
Колонка «0» - промежутки времени; колонка «1» - перемещение в каждый момент времени; колонка «2» - скорость вагона в каждый момент времени.
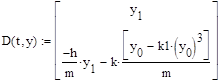
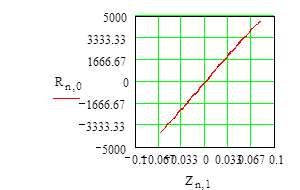
Определение восстанавливающей силы.
Расчет ведется при разбиении - ![]()
Функциональная зависимость в программе:
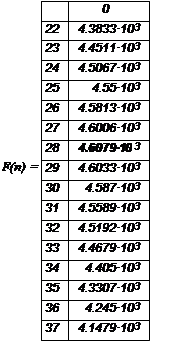
Колонка «0» - значения восстанавливающей силы.
Далее в программе ведется построение необходимых графиков на интервале: ![]() .
.
График зависимости перемещения от времени
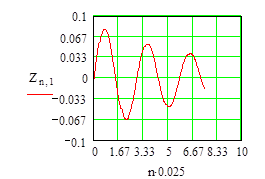
График зависимости скорости от времени
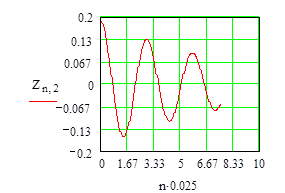
График зависимости силы от перемещения
После проведения решений выведены лишь шестнадцать рассчитанных значений. В общем же получено 300 значений, что соответствую числу интервалов.
Проанализировав результаты получаем:
- максимальное перемещение буфера – 0,0782 метра;
- максимальное значение восстанавливающей силы - ![]() ;
;
- время, за которое восстанавливающая сила достигнет максимального значения – 0,725 сек.
Задача №2
Данный планетарный редуктор (рисунок 2) представляет собой механическую вращательную систему, которая состоит из четырех подсистем. Связь между подсистемами осуществляется через зубчатое зацепление.
Опишем каждую из подсистем. Первая подсистема включает зубчатое колесо 1 (рисунок 2), которое находиться во внешнем зацеплении с сателлитом 2, вал «а» вращающийся в опоре 7 от привода 5, имеющий крутящий момент Мвх . Вторая подсистема включает: сателлит 2, который имеет внешнее зацепление с подвижным зубчатым колесом 1 и внутреннее зацепление с неподвижным зубчатым колесом 3. Третья подсистема это неподвижное зубчатое колесо 3, которое находиться во внутреннем зацеплении с сателлитом 2. Четвертая подсистема состоит из сателлита 2, вращающегося вокруг оси вала «в» вместе с водилом 4, вала «б», вала «в», опор 8,9 и нагрузки 6.
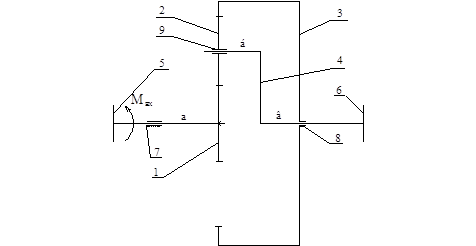
Рисунок 2 – Схема планетарног редуктор 1- подвижное центральное колесо; 2 - сателлит; 3 - неподвижное центральное колесо; 4 - водило; 5 - привод; 6 - нагрузка; 7, 8, 9 - опоры валов; а, б, в – валы.
Исходные данные:
![]() - радиусы делительных окружностей зубчатых колес 1-3;
- радиусы делительных окружностей зубчатых колес 1-3;
![]() - моменты инерции зубчатых колес 1-3 и водила относительно осей вращения;
- моменты инерции зубчатых колес 1-3 и водила относительно осей вращения;
![]() - моменты инерции привода и нагрузки;
- моменты инерции привода и нагрузки;
![]() - моменты вращения сателлита 2 при вращении вместе с водилом;
- моменты вращения сателлита 2 при вращении вместе с водилом;
![]() - коэффициенты вязкого трения в опорах 7-9.
- коэффициенты вязкого трения в опорах 7-9.
Потерями в опоре 9, массой вала «а» и податливостью вала «в» пренебречь.
Сателлит 2 совершает сложное движение: его абсолютное движение складывается из относительного – вокруг собственной оси и переносного – вращение вместе с водилом относительно оси вала «в». Пользуясь методом Виллиса, определим направление переносного движения, т.е направление вращения водило. Допустим, что все звенья передачи 1,2,3 и 4 жестко соединены друг с другом. Сообщая этой жесткой системе переносное вращательное движение вокруг оси вала «в» с угловой скоростью ![]() равной скорости вращения водила, но обратно по знаку. При таком движении водило окажется остановленным
равной скорости вращения водила, но обратно по знаку. При таком движении водило окажется остановленным ![]() , в результате относительные угловые скорости зубчатых колес 1 и 3 будут равны:
, в результате относительные угловые скорости зубчатых колес 1 и 3 будут равны:
![]() (1)
(1)
![]() (2)
(2)
где ![]() абсолютные угловые скорости колес 1 и 3;
абсолютные угловые скорости колес 1 и 3; ![]() относительные угловые скорости колес 1 и 3;
относительные угловые скорости колес 1 и 3; ![]() скорость вращения водила.
скорость вращения водила.
При ![]() планетарная передача превращается в простую зубчатую передачу в которой оси всех зубчатых колес неподвижны.
планетарная передача превращается в простую зубчатую передачу в которой оси всех зубчатых колес неподвижны.
Тогда передаточное отношение передачи будет иметь вид:
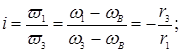 (3)
(3)
Преобразуем данное уравнение:
![]()
![]()
А поскольку колесо 3 является неподвижным ![]() , то
, то
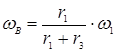 (4)
(4)
Из (4) следует, что направление вращения водила совпадает с направлением вращения колеса 1, то есть скорости относительного и переносного вращения сателлита 2 противоположны по знаку.
Используя метод аналогий представим механическую систему в виде эквивалентных схем каждой из подсистемы (рисунок 3).
Запишем уравнения для источника ![]() :
:
![]() ,
,
где  ;
;
Запишем уравнение равновесия моментов:
![]() ;
;
![]() ,
,
Аналогично запишем уравнение для ![]() ,
, ![]() ,
, ![]() . Так,
. Так,
![]() ,
,
где ![]() ;
;
Запишем уравнение равновесия моментов:
 ;
;
 (5)
(5)
Уравнение для ![]() :
:
![]() , где
, где  ;
;
 ;
;
 . (6)
. (6)
Уравнение для ![]() :
:
![]() , где
, где ![]() ;
;
;
 .
.
Запишем уравнения для зависимых источников угловых скоростей:
![]() ,
,
где ![]() ;
;
![]() =
=![]() (7)
(7)
![]() ,
,
где ![]() ;
;
![]() =
=![]()
Составим уравнение равновесия в узлах эквивалентных схем.
1 подсистема:
узел 8:  (8)
(8)
узел 1:  (9)
(9)
2 подсистема:
узел 7: ![]() (10)
(10)
узел 2:  (11)
(11)
узел 8: ![]() (12)
(12)
3 подсистема:
узел 3:  (13)
(13)
4 подсистема:
узел 9: ![]() (14)
(14)
узел 10:  (15)
(15)
узел 4:  (16)
(16)
Полученные уравнения следует привести к алгебраическому виду. Приведение осуществляют, используя следующие компонентные уравнения:
![]() (17)
(17)
![]() или
или ![]() (18)
(18)
![]() (19)
(19)
Получим следующие уравнения:
1 подсистема:
узел 8:  (20)
(20)
узел 1: ![]() (21)
(21)
2 подсистема:
узел 7:  (22)
(22)
узел 2:  (23)
(23)
узел 8:  (24)
(24)
3 подсистема:
Узел  (25)
(25)
4 подсистема:
узел 9: 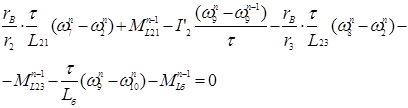 (26)
(26)
узел 10: ![]() (27)
(27)
узел 4: ![]() (28)
(28)