Тема общие принципы управления смонтировали систему автоматического управления. Запустили на
СОДЕРЖАНИЕ: Фундаментальные принципы управления. Система управления. Принципы управления. Виды систем управленияОСНОВЫ ТЕОРИИ УПРАВЛЕНИЯ
Тема 2. ОБЩИЕ ПРИНЦИПЫ УПРАВЛЕНИЯ
Смонтировали систему автоматического управления. Запустили на
оптимизацию. Ни продукции, ни отходов. Один дым.
Директор деревообделочного комбината.
Идеальной системой автоматического управления будем считать систему,
которая умеет смеяться над шутками своего программиста и сваливать свои ошибки на человеческий фактор.
Володя Бочаров. Уральский физик, ХХ в.
Содержание
Введение.
1. Фундаментальные принципы управления. Система управления. Принципы управления. Виды систем управления.
2. Статические характеристики систем управления. Виды статических характеристик. Статическое и астатическое регулирование. Статические регуляторы. Астатический регулятор.
3. Динамический режим работы. Переходные процессы в системе. Оценки переходных характеристик. Импульсная характеристика. Элементарные динамические звенья.
4. Уравнения состояния систем управления. Поведение системы. Линеаризация уравнения динамики. Передаточная функция. Элементарные динамические звенья.
5. Структурные схемы систем управления. Преобразования структурных схем. Последовательное соединение. Параллельное соединение. Замкнутое соединение с обратной связью.
6. Устойчивость и качество систем управления. Управляемость и наблюдаемость. Устойчивость систем. Точность работы систем. Качество работы систем.
Введение
Управление каким-либо объектом или процессом есть целенаправленное воздействие на него в целях установления требуемых состояний объекта, изменения его состояния в требуемом направлении или удержания в заданном постоянном состоянии. Управление должно обеспечивать целевое протекание технологических процессов преобразования энергии, вещества и информации, поддержание оптимальной работоспособности и безаварийности функционирования объекта путем сбора и обработки информации о состоянии объекта и внешней среды, выработки решений о воздействии на объект и их исполнении. В качестве объекта управления может служить самолет, станок, электродвигатель и т.п. Управление объектом с помощью технических средств без участия человека называется автоматическим управлением. Совокупность объекта управления и средств автоматического управления называется системой автоматического управления (САУ).
2.1. Фундаментальные принципы управления [7]
Система управления состоит из двух основных частей: объекта управления (ОУ) и устройства управления (УУ), которое называют также регулятором (Р). Регулятор на основании одного или нескольких задающих воздействий, определяющих закон (алгоритм) управления, вырабатывает управляющее воздействие U(t) на ОУ и поддерживает на заданном уровне или изменяет по определенному закону состояние Y(t), которое может отображаться на его выходе соответствующим сигналом y(t). Перед регулятором ставится задача обеспечения заданного качества работы системы во всех практически важных режимах, в том числе при воздействии на объект внешних возмущающих воздействий и дестабилизирующих факторов X(t) . Регулятор создаётся разработчиком системы, исходя из знаний о свойствах объекта управления и требуемых задачах системы.
|
Рис.2.1.1. Система управления. |
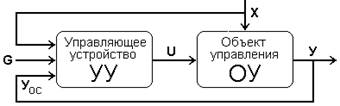
Внешние связи объекта управления показаны на рис. 2.1.1, где Х – канал воздействия среды на объект и управляющее устройство, Y – канал воздействия объекта на среду или информационный канал состояния объекта, U – канал воздействия управления на объект, G – задающее устройство (программатор) изменения управляющего воздействия.
Основной задачей управления является поддержание определенного закона изменения одной или нескольких физических величин процессов, протекающих в ОУ. Эти величины называются управляемыми (температура, давление, уровень жидкости, направление перемещения инструмента, и т.п.).
В составе объекта управления всегда содержится управляющий орган (УО) объекта, с помощью которого можно изменять параметры состояния ОУ (реостат, вентиль, заслонка и т.п.). Физическую величину U(t) на входе управляющего органа называют входной величиной ОУ или управляющим воздействием.
В состав ОУ обычно входит также чувствительный элемент (ЧЭ), который преобразует управляемую величину в пропорциональную ей величину, удобную для информации и использования в системе управления. Физическую величину y(t) на выходе ЧЭ называют выходной величиной ОУ. Как правило, это электрический сигнал (ток, напряжение) или механическое перемещение. В качестве ЧЭ могут использоваться термопары, тахометры, рычаги, датчики давления, положения и т.п.
Управляющее воздействие U(t) формируется устройством управления (УУ) и прикладывается к управляющему органу объекта с целью поддержания требуемых значений управляемой величины. Оно создается исполнительным элементом УУ, в качестве которого могут использоваться электрические или поршневые двигатели, мембраны, электромагниты и т.п.
В составе системы управления, как правило, имеется также задающее устройство (ЗУ). Оно задает программу изменения управляющего воздействия, то есть формирует задающий сигнал u(t). ЗУ может быть выполнено в виде отдельного устройства с формированием воздействия (сигнала) G(t) на вход УУ, может быть встроенным в УУ или вообще отсутствовать. В качестве ЗУ может выступать кулачковый механизм, магнитофонная лента, маятник в часах, и т.п.
Величина X(t), воздействующая на ОУ и (при необходимости) на УУ, называется возмущением. Она отражает влияние на выходную величину y(t) изменений окружающей среды, нагрузки и т.п.
В общем случае все связи в системе управления могут быть многоканальными (многомерными) любой физической природы (электрические, магнитные, механические, оптические и пр.).
Принципы управления. Различают три фундаментальных принципа управления состоянием ОУ: принцип разомкнутого управления, принцип компенсации, принцип обратной связи.
Принцип разомкнутого управления состоит в том, что программа управления жестко задана в ЗУ или внешним воздействием G(t), и управление не учитывает влияние возмущений на параметры процесса. Примеры систем - часы, магнитофон, и т.п.
Принцип компенсации применяется для нейтрализации известных возмущающих воздействий, если они могут искажать состояние объекта управления до недопустимых пределов. При априорно известной связи состояния объекта с возмущающим воздействием значение сигнала u(t) корректируются обратно пропорционально возмущающему воздействию x(t). Примеры систем компенсации: биметаллический маятник в часах, компенсационная обмотка машины постоянного тока и т.п. Достоинство принципа компенсации - быстрота реакции на возмущения. Недостаток - невозможность учета подобным образом всех возможных возмущений.
Принцип обратной связи получил наибольшее распространение в технических системах управления, при этом управляющее воздействие корректируется в зависимости от выходной величины y(t). Если значение y(t) отклоняется от требуемого, то происходит корректировка сигнала u(t) с целью уменьшения данного отклонения. Связь выхода ОУ с входом управляющего устройства, выполняющего коррекцию сигнала u(t), называется главной обратной связью (ОС).
Недостатком принципа обратной связи является инерционность системы. Поэтому часто применяют комбинацию данного принципа с принципом компенсации, что позволяет объединить достоинства обоих принципов - быстроту реакции на возмущение принципа компенсации и точность регулирования независимо от природы возмущений принципа обратной связи.
Виды систем управления. В зависимости от принципа и закона функционирования управляющего устройства различают основные виды систем: системы стабилизации, программные, следящие и самонастраивающиеся системы, среди которых можно выделить экстремальные, оптимальные и адаптивные системы.
Системы стабилизации обеспечивают неизменное значение управляемой величины при всех видах возмущений, т.е. y(t) = const. В устройстве управления формируется эталонный сигнал, с которым сравнивается выходная величина. УУ, как правило, допускает настройку эталонного сигнала, что позволяет менять по желанию значение выходной величины.
Программные системы обеспечивают изменение управляемой величины в соответствии с программой, задаваемой на входе УУ или формируемой ЗУ. К этому виду систем можно отнести магнитофоны, проигрыватели, станки с ЧПУ, и т.п. Различают системы с временной программой, обеспечивающие y = f(t), и системы с пространственной программой, в которых y = f(x), применяемые там, где на выходе систем важно получить требуемую траекторию в пространстве, например, в автомате сверления отверстий в печатных платах.
Следящие системы отличаются от программных лишь тем, что программа y = f(t) или y = f(x) заранее неизвестна. В качестве УУ выступает устройство, следящее за изменением какого-либо внешнего параметра. Эти изменения и будут определять изменения выходной величины y(t).
Все три рассмотренных вида систем могут быть построены по любому из трех принципов управления (разомкнутого управления, компенсации, обратной связи). Для них характерно требование совпадения выходной величины (состояния системы) с некоторым предписанным значением, которое в любой момент времени определено однозначно.
Самонастраивающиеся системы отличаются активным УУ, определяющим такое значение управляемой величины, которое в каком-то смысле является оптимальным.
Так, в экстремальных системах требуется, чтобы выходная величина всегда принимала экстремальное значение из всех возможных, которое заранее не определено и может изменяться. Для его поиска система выполняет небольшие пробные движения и анализирует реакцию выходной величины на эти пробы, после чего вырабатывается управляющее воздействие, приближающее выходную величину к экстремальному значению. Процесс идет непрерывно и выполняется только с использованием обратной связи.
Оптимальные системы являются более сложным вариантом экстремальных систем. Здесь происходит, как правило, сложная обработка информации о характере изменения выходных величин и возмущений, о характере влияния управляющих воздействий на выходные величины, может быть задействована теоретическая информация, информация эвристического характера и т.п. Поэтому основным отличием экстремальных систем является наличие ЭВМ. Эти системы могут работать в соответствии с любым из трех фундаментальных принципов управления.
В адаптивных системах предусмотрена возможность автоматической перенастройки параметров или изменения принципиальной схемы систем управления с целью приспособления к изменяющимся внешним условиям. В соответствии с этим различают самонастраивающиеся и самоорганизующиеся адаптивные системы.
2 .2. СТАТИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМ УПРАВЛЕНИЯ [7].
Математические модели систем управления включают два вида описания состояния: статическое и динамическое.
Виды статических характеристик. Режим работы систем, в котором управляемая и все промежуточные величины не изменяются во времени, называется статическим (установившимся) и описывается уравнениями зависимости выходного состояния объекта управления от постоянных (независимых от времени) значений управляющих воздействий u и любых других дестабилизирующих факторов f. Уравнения этой зависимости вида y = F(u,f) называются уравнениями статики систем. Соответствующие им графики называются статическими характеристиками.
|
Рис. 2.2.1. Статическая характеристика САУ. |
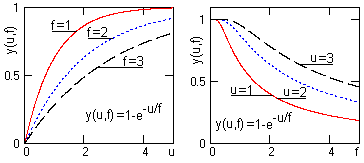
Статическая характеристика звена с одним входом u может быть представлена кривой y = F(u). Если звено имеет второй вход по возмущению f, то статическая характеристика задается семейством кривых y = F(u) при различных значениях f, или y = F(f) при различных u (рис. 2.2.1).
Примером функционального звена системы регулирования уровня воды в баке может быть обычный рычаг с поплавком. Уравнение статики для него имеет вид y = K u. Функцией звена является усиление (или ослабление) входного сигнала в K раз. Коэффициент K = y/u, равный отношению выходной величины к входной, называется коэффициентом усиления звена . Если входная и выходная величины имеют разную природу, его называют коэффициентом передачи . Звенья с линейными статическими характеристиками называются линейными . Статические характеристики реальных звеньев систем, как правило, нелинейные. Для них характерна зависимость коэффициента передачи от величины входного сигнала: K=Dy/Du const, которая может быть выражена какой-либо математической зависимостью, задаваться таблично или графически. Если все звенья системы линейные, то система имеет линейную статическую характеристику. Если хотя бы одно звено нелинейное, то система нелинейная .
|
Рис. 2.2.2. |
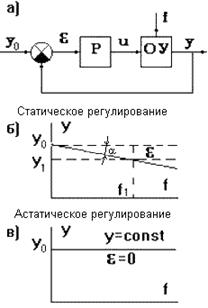
Статическое и астатическое регулирование. Если на управляемый процесс действует возмущение (дестабилизирующий фактор) f, то значение имеет статическая характеристика системы в форме y = F(f) при y0 = const. Возможны два характерных вида этих характеристик (рис. 2.2.2). В соответствии с тем, какая из двух характеристик свойственна данной системе, различают статическое и астатическое регулирование .
Рассмотрим систему регулирования уровня воды в баке. Возмущающим фактором системы является поток Q воды из бака. Пусть при Q = 0 имеем y = y0 , сигнал рассогласования по заданному уровню воды e = 0. Звено управления Р системы (регулятор) настраивается так, чтобы вода при этом в бак не поступала. При Q 0, уровень воды понижается (e 0), поплавок опускается и открывает заслонку, в бак начинает поступать вода. Новое состояние равновесия достигается при равенстве входящего и выходящего потоков воды. Следовательно, при Q 0 заслонка должна быть обязательно открыта, что возможно только при каком-то новом уровне воды y1 , при котором e = К (y0 -y1 ) 0. Причем, чем больше Q, тем при больших значениях e устанавливается новое равновесное состояние. Статическая характеристика системы имеет характерный наклон (рис. 2.2.2б).
Статические регуляторы работают при обязательном отклонении e регулируемой величины y от требуемого значения у0 . Это отклонение тем больше, чем больше возмущение f, и называется статической ошибкой регулятора . Чем больше коэффициент передачи К регулятора, тем на большую величину будет открываться заслонка при одних и тех же значениях e, обеспечивая большую величину потока Q, при этом статическая характеристика системы пойдет более полого. Поэтому для уменьшения статической ошибки надо увеличивать коэффициент передачи регулятора. Этот параметр регулирования получил название статизма d и равен тангенсу угла a наклона статической характеристики, построенной в относительных единицах:
d = tg(a) = (Dy/yн ) / (Df/fн ),
где yн , fн - точка номинального режима системы. При достаточно больших значениях К имеем d » 1/K.
Астатический регулятор применяется, если статическая ошибка регулирования недопустима и регулируемая величина должна поддерживать постоянное требуемое значение независимо от величины возмущающего фактора. Статическая характеристика астатической системы не имеет наклона. Для того чтобы получить астатическое регулирование, необходимо в регулятор включить астатическое звено. Астатическое звено отличается тем, что каждому значению входной величины может соответствовать множество значений выходной величины. Так, для регулирования уровня воды в астатическом режиме может быть применен импульсный двигатель. Если уровень воды понизится, то появившееся значение e 0 включит импульсный двигатель и он начнет открывать заслонку до тех пор, пока значение e не станет равным нулю (по определенному порогу). При поднятии уровня воды значение e сменит знак, и запустит двигатель в противоположную сторону, опуская заслонку.
Астатические регуляторы не имеют статической ошибки, но они инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов системы управления.
2.3. ДИНАМИЧЕСКИЙ РЕЖИМ СИСТЕМ [7, 8, 9, 14].
Обычно на управляемый процесс действуют различные возмущения, отклоняющие управляемый параметр от заданной величины. Установившийся режим является не более чем частным случаем состояния системы на определенных временных интервалах ее работы. Процесс установления требуемого значения управляемой величины называется регулированием, и, ввиду инерционности звеньев регулирования, развивается во времени.
|
Рис. 2.3.1. |
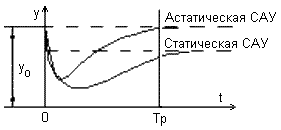
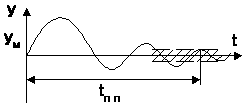
Динамическим называется режим работы системы, при котором входная и выходная величины системы изменяются во времени. Как правило, динамический режим возникает в результате перехода системы от одного установившегося состояния к другому, и поэтому его часто называют переходным режимом, а процесс перехода от одного установившегося состояния к другому - переходным процессом. Типичный пример переходных процессов для статических и астатических систем приведен на рис. 2.3.1.
Динамический режим, характеризующийся протеканием в ней определенных переходных процессов, является основным режимом работы систем. Зависимость выходной величины от изменяющейся во времени входной величины называют динамической характеристикой системы.
Все динамические характеристики можно разделить на две группы.
К первой группе относятся зависимости выходной величины системы от времени, если входная величина изменяется по типовому закону (импульсный, линейный и т.п.). Это так называемые временные характеристики.
Вторую группу динамических характеристик составляют частотные характеристики. К ним относятся зависимости выходной величины или ее параметров от частоты входной величины, изменяющейся по гармоническому закону.
Переходные процессы в системе. Зависимость выходной величины системы от времени, если входная величина изменилась на единый скачок, называют переходной характеристикой.
|
Рис. 2.3.2. |
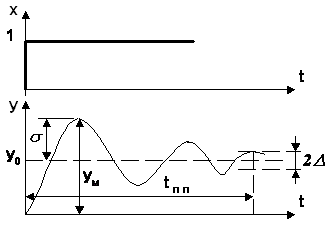
Допустим, система находится в установившемся режиме, и имеет значение выходной величины y = y0 . Пусть в момент t = 0 на объект воздействовал какой-либо управляющий или возмущающий фактор x(t), отклонив значение регулируемой величины от номинальной. Через некоторое время регулятор вернет систему к первоначальному состоянию (с учетом статистической ошибки). Если этот переходной процесс происходит по апериодическому временному закону (как на рис. 2.3.1), то процесс регулирования называется апериодическим. При резких возмущениях в системах возможен колебательный затухающий процесс (рис. 2.3.2), а в неустойчивых системах - возникновение незатухающих колебаний и расходящийся колебательный процесс.
Таким образом, переходная характеристика - это реакция элемента системы на ступенчатое изменение входной величины, как правило, единичное x(t) = 1(t). Под входной величиной понимается любой из управляющих или возмущающих воздействий, в многомерных или многоканальных системах – одно из воздействий. Переходная характеристика может быть задана таблично, графически или аналитически в виде системы уравнений {x = 1(t), y = F(t)}.
Оценки переходных характеристик производятся с помощью следующих показателей:
Характер временной зависимости. По характеру зависимости переходные характеристики делятся на монотонные и колебательные. Переходная характеристика считается монотонной, если она имеет не более одного экстремума. В противном случае переходную характеристику относят к колебательной (немонотонной).
Время переходного процесса – это время, в течение которого выходная величина после начала изменения входной достигает нового установившегося значения. Теоретически это время стремиться к бесконечности, поэтому за время переходного процесса принимают время, за которое выходная величина достигает нового установившегося значения с заданной степенью точности tпп , обычно порядка 3-5% от нового установившегося значения. Нетрудно заметить (рис. 2.3.2). что степень точности D соответствует статической ошибке регулирования.
Динамическая ошибка - это разность между действительным значением выходной величины yi в данный момент (ti ) и её новым установившемся значением y0 , т.е
Dy(t) = y(t) – y0 . (2.2.1)
Динамическая ошибка представляет собой функцию времени. Максимальную положительную относительную ошибку за время переходного процесса называют выбросом. Выброс определяется формулой (см. рис. 2.3.2):
s = (yм – y0 ) / y0 (2.2.2)
Колебательность - количество полных колебаний за время переходного процесса. Колебательность может характеризоваться частотой или периодом колебаний выходной величины.
Импульсная характеристика является другой не менее распространенной временной характеристикой системы. Её называют импульсной переходной характеристикой или функцией веса и обозначают h(t). Это зависимость выходной величины системы от времени, если входная величина изменилась на единичный идеальный импульс.
|
Рис. 2.3.3. |
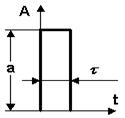
Для получения импульсной характеристики используют импульсы прямоугольной формы (рис. 2.3.3). Такой импульс аналитически определяется выражениями:
A(t) = 0, 0 t t;
A(t) = a, 0 t t;
![]() A(t) dt = at.
A(t) dt = at.
|
Рис. 2.3.4. |
Произведение at часто называют величиной импульса. Если величина импульса равна единице, то импульс называют единичным. Если t 0, то импульс называет идеальным. Он является теоретической дельта-функцией d(t) с бесконечной амплитудой в точке t=0 и площадью, равной 1.
Импульсная характеристика - это реакция системы на идеальное единичное импульсное изменение входной величины. Она может быть задана аналитически в виде системы уравнений {x = d(t), y = F(t)}. Так как идеальный импульс представляет собой производную скачка, d(t) = d 1(t) / dt, то импульсная характеристика есть производная переходной характеристики системы. Оценка импульсной характеристики производится теми же показателями, что и переходной. Пример характеристики приведен на рис. 2.3.4.
2.4. УРАВНЕНИЯ СОСТОЯНИЯ СИСТЕМ УПРАВЛЕНИЯ [7, 8, 9, 14].
Динамические системы, в которых предполагается, что прохождение возмущения от входа к выходу в ОУ происходит мгновенно, описываются обыкновенными дифференциальными уравнениями и называются системами с сосредоточенными параметрами. Например, система управления двигателем, химическим реактором, самолетом и т.п.
Динамические системы, в которых предполагают, что время прохождения возмущения конечно, описываются дифференциальными уравнениями в частных производных и называются системами с распределенными параметрами . Например, прохождение воды в трубопроводе, распространение тепла в реакторе, регулирование температуры в нефтепроводе и т.п.
Нормальное уравнение состояния. Уравнением состояния системы называют равенство, связывающее входные и выходные величины, изменяющиеся во времени, и справедливое для любого момента времени.
Известно, что любую величину, изменяющуюся во времени можно представить в виде дифференциального уравнения. Представим в этом виде управляющий сигнал на входе системы:
![]() . (2.4.1)
. (2.4.1)
Соответственно, уравнение сигнала на выходе элемента:
![]() . (2.4.2)
. (2.4.2)
В каждый текущий момент времени система находится в состоянии определенного равновесия между входом и выходом: Y(t) = K U(t), или
![]() . (2.4.3)
. (2.4.3)
Это уравнение называют нормальным уравнением состояния системы. В более общем виде оно записывается в следующей форме
![]() , (2.4.4)
, (2.4.4)
или с приведением к нормализованной форме
![]() . (2.4.5)
. (2.4.5)
Сопоставлением (2.4.5) с (2.4.3) получаем значения коэффициента усиления K = bm /an , и постоянных времени Ti = an - i /an , tj = bm- j /bm . Коэффициент передачи и постоянные времени однозначно характеризуют свойства системы, в большинстве случаев являются постоянными величинами и называются параметрами системы.
Полное уравнение системы. Полное поведение системы или любого ее звена в зависимости от всех воздействующих факторов описывается уравнением временной динамики y(t) = F(u,f,t). Как правило, это система дифференциальных уравнений. Поэтому основным методом исследования систем является метод решения дифференциальных уравнений. Порядок дифференциальных уравнений может быть довольно высоким, и определенной зависимостью могут быть связаны как входные и выходные величины u(t), f(t), y(t), так и скорости их изменения, ускорения и т.д. Поэтому уравнение временного состояния системы в общем виде можно записать так:
F(y, y, y,..., y(n) , u, u, u,..., u(m) , f, f , f ,..., f(k) ) = 0.
Существует два способа получения дифференциальных уравнений объекта:
· Способ применения известных законов (закон Ома, законы механики и т.д.). Способ применим в случаях, когда объект управления простой и система невысокого порядка, или когда объект сложный, но можно воспользоваться законами статистики.
· Эвристический способ. Используются уравнения, основанные на опыте работы с предыдущими объектами, экспертные оценки, мнение специалистов. Такое описание называют феноменологическим, т.е. описанием объекта по основным чертам его внешнего поведения, без глубокого формального (математического, физического и т.п.) проникновения в сущность его функционирования.
Для полученной модели должны быть исследованы:
1. адекватность модели поведению реального объекта;
2. границы адекватности по пределам изменения параметров и переменных модели.
Линеаризация уравнения динамики. В общем случае уравнение динамики оказывается нелинейным. В целях упрощения решений нелинейные уравнения заменяют линейными, которые приблизительно (с определенной точностью) описывают динамические процессы в системе.
|
Рис. 2.4.2. |
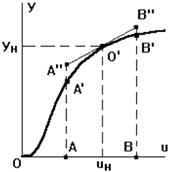
В основе линеаризации нелинейных уравнений лежит допущение, что в нормально функционирующей системе отклонения регулируемой величины и переменных процесса от стационарных (установившихся) значений представляют собой достаточно малые величины. Это положение, как правило, всегда действительно для замкнутых систем. В пределах малых отклонений нелинейные зависимости между величинами, входящими в уравнение динамики, могут быть приближенно представлены отрезками прямых линий. Например, нелинейная статическая характеристика звена на участке АВ (рис. 2.4.2) может быть представлена отрезком касательной АВ в точке номинального режима. Начало координат переносится в точку О, и в уравнениях записываются не абсолютные значения величин y, u, f, а их отклонения от номинальных значений: Dy = y-ун , Du = u-uн , Df = f-fн . Это позволяет получить нулевые начальные условия, если считать, что при t 0 система находилась в номинальном режиме.
Если допустить, что система находится в номинальной рабочей точке U0 = uн , У0’ = yн , то ее состояние в установившемся режиме опишется уравнением статики: Y0’ = K X0’ . При выходе из установившегося состояния координаты системы получат приращения и станут равными U = U0’ +DU, Y = Y0’ +DY, а поскольку производные от постоянных величин равны нулю (di (X0’ +DX)/dti = di (DX)/dti ), то уравнение такого состояния будет иметь вид
![]()
![]() . (2.4.6)
. (2.4.6)
Для переноса в уравнении (2.4.6) начала координат в рабочую точку вычтем из него уравнение статики. В результате получим:
![]() . (2.4.7)
. (2.4.7)
Это уравнение обычно называют уравнением состояния системы в приращениях от рабочей точки.
Аналогично можно выполнить и линеаризацию функции нескольких переменных. Для примера возьмем характерный вариант уравнения динамики систем с ограниченным количеством производных: F(y,y,y,u,u) = f. Здесь производные по времени u,y,y также являются переменными. В точке, близкой к номинальному режиму: f = fн +Df и F = Fн +DF. Разложим функцию F в ряд Тейлора в окрестности точки номинального режима и, отбрасывая члены ряда высоких порядков малости, получим:
![]() .
.
В номинальном режиме имеем частное решение Fн = fн , а все частные производные функции F в точке O представляют собой некоторые постоянные коэффициенты, или переменные во времени, если функция F содержит переменную t в явном виде. Заменяя значения частных производных соответствующими коэффициентами и переходя от приращений переменных к их производным, получаем:
A0 y + A1 y + A2 y = B0 u + B1 u + f.
В данном уравнении используются не абсолютные значения величин y, u, f и их производных по времени, а отклонения этих величин от номинальных значений (уравнение в отклонениях) .
В общем случае частные производные представляют собой либо постоянные матрицы зависимости от внешних воздействий f, значения которых могут быть существенно нелинейными, либо матрицы, зависящие только от времени, и полученное уравнение есть либо система линейных дифференциальных уравнений с постоянными коэффициентами относительно отклонений y и u, либо система с переменными коэффициентами, которые и решаются относительно выходной величины. Порядок системы уравнений равен n по порядку производной при y.
Для дифференциального уравнения произвольного порядка:
A0 y(n) + A1 y(n-1) + ... + An-1 y + An y = B0 u(m) + ... + Bm-1 u + Bm u + f.
|
Рис. 2.4.3. |
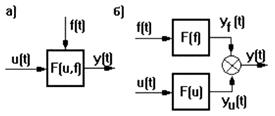
К частным производным линеаризованной системы можно применить принцип суперпозиции: реакция системы на несколько одновременно действующих входных воздействий равна сумме реакций на каждое воздействие в отдельности. Это позволяет звено с двумя входами u и f разложить на два звена, каждое из которых имеет один вход и один выход (рис. 2.4.3). Поэтому в дальнейшем ограничимся изучением поведения систем и звеньев с одним входом, уравнение динамики которых имеет вид:
a0 y(n) + a1 y(n-1) + ... + an-1 y + an y = b0 u(m) + ... + bm -1 u + bm u. (2.4.7)
где n m, так как при n m системы технически нереализуемы. Это уравнение описывает систему в динамическом режиме лишь приближенно с той точностью, которую обеспечивает линеаризация.
Передаточная функция. В теории управления часто используют символическую операторную форму записи дифференциальных уравнений. При этом вводится понятие алгебраизированного оператора дифференцирования p = d/dt так, что, dy/dt = py, а pn = dn /dtn . Это лишь другое сокращенное обозначение операции дифференцирования. Соответственно, операция интегрирования записывается как 1/p. В операторной форме исходное дифференциальное уравнение записывается как алгебраическое:
a0 p(n) y+a1 p(n-1) y+...+an y = (a0 p(n) +a1 p(n-1) +...+ an )y = (b0 p(m) +...+bm-1 p+bm )u.
Не надо путать эту форму записи с операционным исчислением. Здесь используются непосредственно функции y(t), u(t) (оригиналы), а не их изображения Y(p), U(p), получаемые из оригиналов преобразованием Лапласа. При нулевых начальных условиях с точностью до обозначений записи действительно похожи, и некоторые правила операционного исчисления применимы к операторной форме записи уравнений динамики. Так, оператор р можно выносить за скобки и можно рассматривать в качестве сомножителя, но без права перестановки: py yp. Условно можно считать оператор р алгебраической величиной.
Уравнение динамики в операторной форме:
![]()
Дифференциальный оператор W(p) называют передаточной функцией . Она определяет зависимость отношения выходной величины звена к входной во времени: W(p) = y(t)/u(t), т.е. динамический коэффициент усиления. Передаточные функции в операторной форме также представляют собой сокращенную символическую запись дифференциальных уравнений. В установившемся режиме d/dt = 0, p = 0, и передаточная функция превращается в коэффициент передачи звена K = bm /an .
Знаменатель передаточной функции D(p) = a0 pn +a1 pn-1 +a2 pn -2 +...+an называют характеристическим полиномом . Его корни, при которых знаменатель D(p) обращается в ноль, а W(p) стремится к бесконечности, называются полюсами передаточной функцией.
Числитель K(p) = b0 pm +b1 pm-1 +...+bm называют операторным коэффициентом передачи . Его корни, при K(p) = 0 и W(p) = 0, называются нулями передаточной функции.
Звено системы с известной передаточной функцией называют динамическим звеном. Под динамическим звеном понимают устройство любого физического вида и конструктивного оформления, описываемое определенным дифференциальным уравнением. На схемах динамическое звено изображают прямоугольником, внутри которого записывается выражение передаточной функции. Для звена с двумя входами и одним выходом (рис. 2.4.3) должны быть записаны передаточные функции по каждому из входов. Передаточная функция является основной характеристикой звена, из которой можно получить все остальные характеристики. Она определяется только параметрами системы и не зависит от входных и выходных величин. Например, одним из динамических звеньев является интегратор. Его передаточная функция Wи (p) = 1/p. Схема системы, составленная из динамических звеньев, называется структурной .
Элементарные динамические звенья. Динамика большинства функциональных элементов систем независимо от исполнения может быть описана одинаковыми по форме дифференциальными уравнениями не более второго порядка. Такие элементы называют элементарными динамическими звеньями. Элементарные динамические звенья имеют один вход и один выход, а передаточная функция элементарного звена задается отношением двух полиномов:
Wэ (p) = (b0 p2 + b1 p + b2 ) / (a0 p2 + a1 p + a2 ).
Известно также, что любой полином произвольного порядка можно разложить на простые сомножители:
D(p) = a0 p(n) + a1 p(n-1) +...+an = a0 (p-p1 ) (p-p2 )...(p-pn ),
где p1 , p2 , ... , pn - корни полинома D(p). Аналогично:
K(p) = b0 p( m) +...+ bm -1 p+bm = b0 (p-p~ 1 ) (p-p~ 2 )...(p-p~ m ),
где p~ 1 , p~ 2 , ... , p~ m - нули полинома K(p). Отсюда:
![]()
Корни любого полинома могут быть либо вещественными, либо комплексными попарно сопряженными. Пара комплексно сопряженных корней соответствует полиному второй степени. Передаточную функцию линеаризованной системы можно представить как произведение передаточных функций элементарных звеньев:
W = K W1 W2 W3 … ,
где К=b0 /a0 – множитель, которым может регулироваться общая чувствительность системы к управляющим или дестабилизирующим воздействиям. Каждому такому звену в системе, как правило, соответствует отдельный узел. Зная свойства отдельных звеньев можно судить о динамике системы в целом.
Классификация звеньев производится по виду их дифференциальных уравнений и соответствующих передаточных функций, независимо от исполнения (механические, гидравлические, электрические и пр.). Передаточные функции типовых звеньев, из которых синтезируются системы, обычно имеют числитель или знаменатель, равный единице.
2.5. СТРУКТУРНЫЕ СХЕМЫ СИСТЕМ УПРАВЛЕНИЯ [7].
Преобразования структурных схем. Структурная схема системы в простейшем случае строится из элементарных динамических звеньев. Несколько элементарных звеньев могут быть заменены одним звеном со сложной передаточной функцией. Для этого существуют правила эквивалентного преобразования структурных схем.
Последовательное соединение (рис. 2.5.1) - выходная величина предшествующего звена подается на вход последующего. При этом можно записать:
|
Рис. 2.5.1. |
y1 = W1 y0 ; y2 = W2 y1 ; ... ; yn = Wn yn -1 ,
yn = W1 W2 ...Wn y0 = Wэкв y0 .
Wэкв
= ![]() Wi
.
Wi
.
|
Рис. 2.5.2. |
Передаточные функции последовательно соединенных звеньев перемножаются.
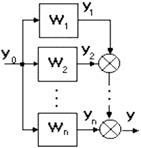
Параллельное соединение (рис.2.5.2) - на вход каждого звена подается один и тот же сигнал, а выходные сигналы складываются:
y = y1 + y2 + ... + yn = (W1 + W2 + ... + Wn ) y0 = Wэкв y0 .
Wэкв
=![]() Wi
.
Wi
.
|
Рис. 2.5.3. |
Цепочка звеньев, соединенных параллельно, преобразуется в звено с передаточной функцией, равной сумме передаточных функций отдельных звеньев.
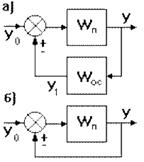
Замкнутое соединение с обратной связью (рис. 2.5.3а) - звено охвачено положительной или отрицательной обратной связью. Участок цепи, по которому сигнал идет с выхода на вход, называется цепью обратной связи с передаточной функцией Wос . Для отрицательной обратной связи (ОС):
y = Wп u; y1 = Wос y; u = y0 - y1 ,
y= Wп y0 - Wп y1 = Wп y0 - Wп Woc y = y(1+Wп Woc ) = Wп y0 = Wэкв y0 ,
Wэкв = Wп /(1+Wп Wос ).
Для положительной ОС:
Wэкв = Wп /(1-Wп Wос ).
Если Woc = 1, то обратная связь называется единичной (рис. 2.5.3б):
Wэкв = Wп /(1 ± Wп ).
|
Рис. 2.5.4. |

Как прямая Wп , так и обратная Wос цепь может состоять из нескольких функциональных блоков и образует замкнутую систему. Замкнутую систему называют одноконтурной, если при ее размыкании (отсоединении обратной связи от сумматора с y0 ) получают цепочку из последовательно соединенных элементов. Замкнутые системы бывают и многоконтурными (рис. 2.5.4).Чтобы найти эквивалентную передаточную функцию для данной схемы нужно сначала определить передаточные функции отдельных участков.
2.6. УСТОЙЧИВОСТЬ И КАЧЕСТВО СИСТЕМ УПРАВЛЕНИЯ [2, 13].
Управляемость и наблюдаемость. Задача управления системой состоит в определении такой функции u(t), при которой осуществляется целенаправленное движение (изменение состояния) системы. Всегда ли эта задача имеет решение? Ответ на этот вопрос дают два свойства системы – управляемость и наблюдаемость.
Линейная система является управляемой, если она может быть переведена из любого начального состояния y(0) в любое конечное состояние y(T) за конечное время Т.
Линейная система является наблюдаемой, если любое ее состояние y(0) можно восстановить по значениям u(t) и y(t), измеренным на интервале 0 t T.
Устойчивость систем. Понятие устойчивости системы связано со способностью системы возвращаться в состояние равновесия после исчезновения внешних сил, которые вывели ее из этого состояния. Если система неустойчива, то она не возвращается в состояние равновесия.
При возмущениях в системе возникают колебания Y(t), которые могут быть затухающими, незатухающими, стремящимися к положению равновесия, или уходящими от него (неустойчивые).
Систему называют устойчивой, если будучи выведенной из состояния равновесия она возвращается (с допустимой погрешностью) к прежнему положению после снятия возмущающего воздействия. Простейшая аналогия устойчивости – шарик внутри вогнутой поверхности, который всегда возвращается в самое нижнее положение на поверхности независимо от того, выведен ли он из этого положения движением самой поверхности или импульсным воздействием на шарик. Шарик на выпуклой поверхности – пример неустойчивой системы.
При определении устойчивости системы рассматривается ее свободное поведение при равенстве нулю возмущающих входных воздействий. Состояние системы определяется однородным дифференциальным уравнением замкнутой системы:
an y( n) + an -1 y( n-1) + … +a1 y + a0 = 0.
Характеристическое уравнение:
an p( n) + an -1 p( n-1) + … +a1 p + a0 = 0. (2.6.1)
Общее решение: Y(t) = ![]() Ck
exp(pk
t), если pk
– действительные корни.
Ck
exp(pk
t), если pk
– действительные корни.
Положение А.М. Ляпунова для определения устойчивости систем по корням характеристического уравнения:
1. Если характеристическое уравнение линеаризованной системы имеет все корни с отрицательными действительными числами, то система устойчива.
2. Если хотя бы один корень имеет положительную часть, то система неустойчива.
3. При наличии нулевых или чисто мнимых корней поведение реальной системы не всегда (даже качественно) определяется её линеаризованным уравнением.
Точность работы систем. Устойчивость является необходимым, но не достаточным условием для реализации систем. Одна из основных характеристик качества регулирования – это точность, под которой понимается величина ошибки регулирования в различных установившихся режимах.
В системах стабилизации таким режимом является установившееся состояние (положение равновесия), а точность системы характеризуется величиной статической ошибки eст отклонения от заданного состоянии при влиянии дестабилизирующих воздействий. Самым простым способом изучения точности является использование передаточной функции по ошибке (мера малости ошибки слежения):
We (p) = 1/(1+W(p)), (2.6.2)
и меры точности воспроизведения задающего воздействия:
Wз (p) = W(p)/(1+W(p)). (2.6.3)
Для абсолютно точной системы We (p) = 0, Wз (p) = 1. Реальные частотные характеристики систем отличаются от идеальных без превышения заданного значения статистической ошибки в некоторой полосе пропускания от wн до wв . Соответственно, для повышения точности необходимо обеспечивать выполнение условий: We (p) 0, Wз (p) 1.
Если допустимая ошибка мала, необходимо применять регуляторы с интегральной составляющей в законе регулирования, обеспечивающие регулирование без статической ошибки. Следует учитывать также, что ошибка слежения зависит от вида задающего воздействия и связана со всеми производными входного сигнала. При отсутствии в системе интеграторов линейно возрастающие и степенные воздействия могут приводить к неограниченному нарастанию ошибок слежения.
Для систем с обратной связью передаточная функция при размыкании системы (разрыве обратной связи) определяется выражением:
Wpc (p) = K(b0 pm + b1 pm-1 +…+1)/ (a0 pm + a1 pm-1 +…+1), (2.6.4)
где К- коэффициент усиления (K=Wp c (0)). Отсюда следует, что увеличение К разомкнутой системы является одним из основных способов повышения точности систем. Однако это не означает, что таким способом можно реализовать любую желаемую точность, так как при чрезмерном увеличении К возможна потеря устойчивости замкнутой системы.
Качество работы систем. Устойчивость системы является необходимым , но недостаточным условием ее работоспособности. Устойчивая система может оказаться недостаточно точной при отработке различных воздействий; недостаточно быстродействующей при выходе на заданную величину, и т.п. При исследовании систем приходится решать задачи обеспечения требуемых показателей качества переходного процесса: быстродействия, колебательности, перерегулирования, характеризующих точность и плавность протекания процесса. Качество работы системы в конечном счете определяется величиной ошибки, равной разности между требуемым и действительными значениями регулируемой величины.
Для определения качества динамической системы используются критерии качества, которые можно разбить на 4-е группы.
К первой группе относятся критерии, использующие величину ошибки в различных типовых режимах. Эту группу называют критериями точности динамических систем регулирования.
К второй группе относятся критерии, определяющие величину запаса устойчивости , то есть критерии, устанавливающие, насколько далеко от границы устойчивости находится система регулирования.
Наиболее опасной для динамической системы является колебательная граница устойчивости. Это определяется тем, что стремление повысить общий коэффициент усиления в системе, как правило, приводит к приближению системы именно к колебательной границе устойчивости и затем – к возникновению незатухающих автоколебаний.
Третья группа критериев качества определяет быстродействие системы регулирования . Под быстродействием понимается быстрота реагирования системы регулирования на появление управляющих и возмущающих воздействий. Наиболее просто быстродействие может оцениваться по времени затухания переходного процесса системы.
К четвертой группе критериев качества относятся интегральные критерии , дающие оценку некоторых обобщенных свойств, которые могут учитывать точность, запас устойчивости и быстродействие одновременно.
|
Рис. 2.6.1. |
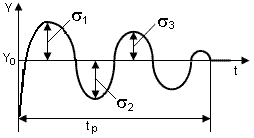
Интегральные показатели качества системы определяются, как правило, непосредственно по кривой переходного процесса (после включения системы или по реакции на единичную входную ступеньку), условный пример которого приведен на рис. 2.6.1, где: s – динамические отклонения управляемой величины от задания Yo (установившегося режима), tp – время регулирования, т.е. продолжительность переходного процесса (характеризует быстродействие системы).
Степень затухания:
y = ( s1 – s3 )/ s1 .
Коэффициент перерегулирования (для переходных процессов с колебательным режимом):
h = 100(s2 / s1 ) %.
Интегральный критерий качества:
I =![]() | s(t)| dt.
| s(t)| dt.
Интегральный квадратичный критерий качества:
I =![]() s2
(t) dt.
s2
(t) dt.
Чем меньше оценка значений коэффициента перерегулирования и критерия качества, тем лучше качество переходного процесса системы.
литература
2. Повзнер Л.Д. Теория систем управления: Учебное пособие для вузов. - М.: Изд. МГГУ, 2002. - 472 с.
7. Туманов М.П. Теория автоматического управления: Лекции. URL: http://elib.ispu.ru/library/lessons/Tihonov_2/index.htm.
8. Туманов М.П. Теория управления. Теория линейных систем автоматического управления: Учебное пособие. – МГИЭМ. М., 2005, 82 с. URL: http://window.edu.ru/window_catalog/files/r24738/5.pdf.
9. Бесекерский В.А., Попов Е.П. Теория систем автоматического регулирования. – М.: Наука, 1975.
13. Бирюков С.В. Основные понятия теории автоматического управления. - URL: http://bookz.ru/rar/bookz/teacher/tau_ucheb.rar
Главный сайт автора ~ Лекции по ОТУ
О замеченных опечатках, ошибках и предложениях по дополнению: davpro@yandex.ru.
Copyright ©2008-2009 Davydov А.V.