Горизонтальный кран штабелер
СОДЕРЖАНИЕ: 2. Задание на проектирование Разработать электропривод для механизма горизонтального перемещения крана-штабелера, обеспечивающий выполнение его технологических требований по исходным данным, приведенным в таблице 1.1.
2. Задание на проектирование
Разработать электропривод для механизма горизонтального перемещения крана-штабелера, обеспечивающий выполнение его технологических требований по исходным данным, приведенным в таблице 1.
Таблица 1.1
| Технологические данные |
Обозначение |
Размерность |
Значение |
| Максимальное количество ячеек (рядов) по длине |
|
- |
64 |
| Длина ячейки |
|
м |
1 |
| Масса незагруженного крана |
кг |
1600 |
|
| Масса груза |
|
кг |
250 |
| Номинальная скорость передвижения |
|
|
1 |
| Допустимое ускорение (замедление) |
|
|
0,5 |
| Число включений в час |
|
- |
60 |
| Диаметр ходового колеса |
|
м |
0,2 |
| Диаметр цапфы |
|
м |
0,06 |
| Точность остонова |
|
м |
0,002 |
| Путь перемещения на пониженной скорости в зоне точного останова |
|
м |
0,04 |
| Расчетный путь |
|
м |
32 |
При расчетах систем электропривода предполагается, что электрооборудование эксплуатируется на высоте не более 800 м над уровнем моря в условиях умеренного климата в сухом отапливаемом помещении (климатические условия и категория размещения У4 или УХЛ4 по ГОСТ 15150–69), при отсутствии в атмосфере токопроводящей пыли и коррозионно-активных веществ, а также при практическом отсутствии вибрационных нагрузок (группа эксплуатации М1 по ГОСТ 17516–70), степень защищенности электрооборудования и электродвигателей от внешних воздействий должна быть не менее чем IР23 по ГОСТ 14294–72, 14494–72.
СОДЕРЖАНИЕ
1. Задание на проектирование. 2
3. расчет тахограммы механизма. 3
4. расчет статической мощности на валу электродвигателя горизонтального перемещения 3
5. предварительный выбор электродвигателя. 3
7. Расчёт участков нагрузочной диаграммы.. 3
8. Поверка выбранного электродвигателя по нагреванию и по перегрузке. 3
9. Анализ динамических свойств электромеханического преобразователя, как объекта управления. 3
10. Выбор преобразователя частоты.. 3
3. Введение
Краном-штабелером называется подъемно-транспортная машина циклического действия, предназначенная для обслуживания складов. Кран-штабелер передвигается по рельсам вдоль прохода, по обе стороны которого расположены стеллажи, состоящие из горизонтальных и вертикальных рядов ячеек, в которых на опорах располагаются контейнеры, тарные ящики или поддоны с деталями (грузом). Краны-штабелеры оборудованы вертикальной колонной, по которой перемещается грузовой захват или специальная платформа.
Краны-штабелеры имеют три механизма с электрическим приводом:
1. Механизм горизонтального перемещения штабелера по напольному рельсу в проходе между стеллажами. Максимальный путь перемещения этого механизма определяется количеством рядов ячеек, расположенных по длине.
2. Механизм вертикального перемещения (механизм подъема и опускания грузоподъемника). Максимальный путь перемещения этого механизма определяется количеством рядов (этажей) ячеек, расположенных на высоте.
3. Механизмы передвижения грузового телескопического захвата.
Установка грузов в стеллажи производиться следующим образом: с приемной площадки путем выдвижения телескопического грузового захвата груз забирается и устанавливается на грузовой платформе. После этого механизмы горизонтального перемещения и подъема производят установку грузовой платформы напротив заданной ячейки стеллажа. Причем вилы грузового захвата при установке груза в пустую ячейку находятся на 30-50 мм выше ячейки. Затем производится выдвижение грузового захвата внутрь стеллажа и опускание его на 10-20 мм ниже уровня ячейки. При этом груз остается лежать на опорной плоскости стеллажной ячейки, грузовой захват убирается внутрь крана-штабелера, который возвращается в исходной положение.
Доставка груза со склада производится аналогично, только в обратной последовательности.
Таким образом, как следует из технологических требований, необходимо обеспечить позиционирование механизмов горизонтального и вертикального перемещения с высокой точностью – (25) мм. Для обеспечения такой точности необходимо создавать позиционные электроприводы, управление которыми производится в функции знака и модуля рассогласования между заданным и истинным положением управляемого механизма. В этом случае можно обеспечить требуемую точность позиционирования бес использования режима пониженной скорости.
При отсутствии контура положения отрезок пути перед точной остановкой (4060) мм механизм должен пройти на пониженной скорости, что позволит обеспечить требуемую точность позиционирования.
Кроме того, по условиям работы грузозахватного устройства (при транспортировке грузов на стеллаж и при их извлечении со стеллажа) должно быть обеспечено перемещение механизма вертикального перемещения в каждом цикле работы крана-штабелера на 30-50 мм в режиме пониженной скорости или по треугольной тахограмме.
Требования к электроприводу
Электропривод крана штабелера должен обеспечивать следующие требования:
1) Режим работы – повторно-кратковременный.
2) Диапазон регулирования скорости ( при отсутствии контура положения) – до ![]() ( в зависимости от требуемой точности позиционирования).
( в зависимости от требуемой точности позиционирования).
3) Необходимость точного позиционирования механизма в фиксированных точках.
4) Необходимость ограничения значений ускорения и замедления с целью предотвращения пробуксовки.
5) Возможность осуществления реверса.
Упрощенная кинематическая схема механизма приведена на рис.2.1.
Упрощенная кинематическая схема механизма горизонтального перемещения крана штабелера по напольному рельсу
1 – электродвигатель; 2 – редуктор; 3 – тормоз; 4 – ходовое колесо
Рис.2.1
3. расчет тахограммы механизма
Упрощенная типовая тахограмма механизма горизонтального перемещения штабелера
Рис.3.1
1) Время разгона крана:
где
- конечная скорость на участке разгона;
– начальная скорость перемещения крана;
![]()
2) Путь, проходимый при разгоне
3) Время торможения
![]()
где
![]() – конечная скорость на первом участке торможения;
– конечная скорость на первом участке торможения;
– пониженная скорость
![]() – начальная скорость на первом участке торможения
– начальная скорость на первом участке торможения
![]()
![]()
4) Путь, проходимый на первом участке торможения:
![]()
5) Время работы на участке с пониженной скоростью:
6) Время торможения с пониженной скорости до полного останова крана:
![]()
Где
![]() – конечная скорость на втором участке торможения
– конечная скорость на втором участке торможения
![]()
![]() – начальная скорость на втором участке торможения
– начальная скорость на втором участке торможения
![]()
7) Путь, проходимый на втором участке торможения:
8) Путь, проходимый при работе с установившейся скоростью:
![]()
Где
![]() – полный путь, проходимый краном:
– полный путь, проходимый краном:
![]()
![]()
9) Время работы на участке с установившейся максимальной скоростью:
![]()
10) Время цикла работы:
![]()
11) Время паузы:
![]()
4. расчет статической мощности на валу электродвигателя горизонтального перемещения
Где
![]() – статическая мощность на валу электродвигателя горизонтального перемещения
– статическая мощность на валу электродвигателя горизонтального перемещения
![]() – коэффициент, учитывающий трение реборд ходового колеса о рельсы:
– коэффициент, учитывающий трение реборд ходового колеса о рельсы:
![]()
– общий вес незагруженного крана, имеющего массу :
![]() – вес груза, имеющего массу
– вес груза, имеющего массу ![]() :
:
![]()
![]() – коэффициент трения в подшипниках ходовых колес:
– коэффициент трения в подшипниках ходовых колес:
![]()
![]() – диаметр цапфы ходового колеса:
– диаметр цапфы ходового колеса:
![]()
![]() – коэффициент трения качения ходовых колес:
– коэффициент трения качения ходовых колес:
![]()
![]() – коэффициент полезного действия передач механизма:
– коэффициент полезного действия передач механизма:
![]()
![]() – диаметр ходового колеса:
– диаметр ходового колеса:
![]()
![]()
5. предварительный выбор электродвигателя
По рассчитанной статической мощность на валу электродвигателя и необходимым требованиям к электроприводу предварительно выбираем асинхронный двигатель серии 4А.
На практике, обычно, для двигателей кранов штабелеров горизонтального перемещения скорость вращения поля (синхронная скорость) принимается равной ![]() . Таким образом, из каталога электродвигателей предварительно выбрал двигатель: 4А80А6У3
. Таким образом, из каталога электродвигателей предварительно выбрал двигатель: 4А80А6У3
Основные технические данные электродвигателя приведены в таблице 1.
Таблица 5.1
|
|
При номинальной мощности |
|
|
|
Параметры схемы замещения, о. е. |
||||||||||
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
![]() – номинальная мощность;
– номинальная мощность;
![]() – номинальная частота вращения (об/мин);
– номинальная частота вращения (об/мин);
![]() – ток статора при напряжении 380 В;
– ток статора при напряжении 380 В;
![]() – коэффициент мощности;
– коэффициент мощности;
![]() – коэффициент полезного действия двигателя;
– коэффициент полезного действия двигателя;
![]() – момент инерции ротора;
– момент инерции ротора;
![]() - главное индуктивное сопротивление;
- главное индуктивное сопротивление;
![]() - активное сопротивление статора;
- активное сопротивление статора;
![]() - индуктивное сопротивление рассеяния обмотки статора;
- индуктивное сопротивление рассеяния обмотки статора;
![]() - активное сопротивление ротора, приведенное к параметрам статора;
- активное сопротивление ротора, приведенное к параметрам статора;
![]() - индуктивное сопротивление рассеяния ротора, приведенное к параметрам статора;
- индуктивное сопротивление рассеяния ротора, приведенное к параметрам статора;
Активные сопротивления приведены при расчетной рабочей температуре.
Угловая скорость вращения поля:
![]()
Номинальная угловая скорость двигателя:
![]()
Номинальный момент двигателя:
![]()
Номинальное скольжение двигателя:
![]()
Критическое скольжение двигателя:
Где ![]() - перегрузочная способность двигателя по моменту.
- перегрузочная способность двигателя по моменту.
![]()
Для окончательного выбора двигателя необходимо, чтобы он проходил проверку по нагреву и по перегрузке.
6. Расчёт статического момента и суммарного момента инерции электропривода, приведенных к валу двигателя
6.1. Расчёт статического момента, приведенного к валу двигателя
Где
![]() – Статический момент нагрузки, приведенный к валу двигателя;
– Статический момент нагрузки, приведенный к валу двигателя;
![]() – передаточное число редуктор:
– передаточное число редуктор:
![]()
![]() – угловая скорость вращения ходового колеса:
– угловая скорость вращения ходового колеса:
![]()
![]()
Из стандартного ряда передаточных чисел редуктора выбираем ближайшее большее значение передаточного числа ![]() . Таким образом, получилось, что расчётное значение отличается от табличного примерно на
. Таким образом, получилось, что расчётное значение отличается от табличного примерно на ![]() , что разрешено ГОСТ 27142-97 для двухступенчатых редукторов.
, что разрешено ГОСТ 27142-97 для двухступенчатых редукторов.
![]()
6.2. Расчет момента инерции механизма, приведенного к валу двигателя, и суммарного момента инерции
![]()
Где ![]() – радиус приведения.
– радиус приведения.
![]()
Суммарный момент инерции механизма:
где
![]() – момент инерции редуктора.
– момент инерции редуктора.
![]()
7. Расчёт участков нагрузочной диаграммы
Расчёт моментов двигателя на различных участках движения электропривода, ведется с учетом постоянства ускорений и замедлений. Ограничение ускорений принято для предотвращения проскальзывания колес электропривода во время движения.
1) Участок разгона от нулевой скорости до максимальной:
Где
![]() - момент двигателя на участке разгона.
- момент двигателя на участке разгона.
– динамический момент. Модуль динамического момента будет постоянным, так как ускорения и замедления равны по модулю. Динамический момент будет отличаться лишь знаками на участках разгона и торможения.
![]() – угловое ускорение электропривода:
– угловое ускорение электропривода:
![]()
![]()
2) Участок с установившейся максимальной скоростью:
![]()
![]() – момент двигателя на участке с установившейся максимальной скоростью.
– момент двигателя на участке с установившейся максимальной скоростью.
3) Участок торможения от максимальной скорости до пониженной:
![]() – момент двигателя на участке торможения от максимальной скорости до пониженной.
– момент двигателя на участке торможения от максимальной скорости до пониженной.
4) Участок с установившейся пониженной скоростью:
![]()
![]() – момент двигателя на участке с установившейся пониженной скоростью.
– момент двигателя на участке с установившейся пониженной скоростью.
5) Участок торможения с пониженной скорости до полного останова:
![]() – момент двигателя на участке торможения с пониженной скорости до полного останова.
– момент двигателя на участке торможения с пониженной скорости до полного останова.
Нагрузочная диаграмма и тахограмма электропривода показаны на рис.7.
8. Поверка выбранного электродвигателя по нагреванию и по перегрузке
8.1. Проверка выбранного двигателя по нагреванию
Проверка выбранного двигателя по нагреванию осуществляется методом эквивалентного момента. Способ корректен, если скорость электродвигателя будет регулироваться преобразователем частоты, который сохраняет постоянство магнитного потока.
Поскольку, выбранный электродвигатель был спроектирован для продолжительного режима работы, а в проекте он будет работать в повторно-кратковременном режиме работы, и тот факт, что двигатель имеет самовентелируемое охлаждение, то необходимо учитывать ухудшение теплоотдачи при работе со скоростями меньшими номинальной скорости двигателя.
Таким образом, условие прохождения двигателя по нагреванию имеет вид:
Где
– эквивалентный момент:
![]() – значение момента двигателя на одном из участков работы электропривода.
– значение момента двигателя на одном из участков работы электропривода.
![]() - значение номинальной продолжительности включения (ПВ), приведенного к ПВ графика:
- значение номинальной продолжительности включения (ПВ), приведенного к ПВ графика:
![]()
![]() – относительная номинальная продолжительность включения
– относительная номинальная продолжительность включения
![]()
![]() – коэффициент теплоотдачи при неподвижном двигателе:
– коэффициент теплоотдачи при неподвижном двигателе:
![]()
![]()
– относительная продолжительность включения графика, то есть это фактическое значение относительной продолжительности включения
![]() - число рабочих участков двигателя,
- число рабочих участков двигателя, ![]() ;
;
![]() – число всех участков работы двигателя, включая участки паузы,
– число всех участков работы двигателя, включая участки паузы, ![]() ;
;
Расчет коэффициентов теплоотдачи на различных участках работы двигателя:
Примерный график, показывающий зависимость коэффициента теплоотдачи от скорости вращения двигателя показан на рис. 1
Линейный график изменения теплоотдачи машины, при изменении скорости вращения
Рис.8.1
Таким образом, математическое описание соответствующее графику, изображенному на рис. 1, имеет следующий вид:
![]()
В переходных режимах считаем, что коэффициент теплоотдачи равен полусумме значений на конечных участках.
1) Участок разгона от нулевой скорости до максимальной:
![]()
2) Участок с установившейся максимальной скоростью:
![]()
3) Участок с установившейся пониженной скоростью:
4) Участок торможения от максимальной скорости до пониженной:
![]()
5) Участок торможения с пониженной скорости до полного останова:
![]()
Сравним значение эквивалентного момента со значение номинального момента, с учетом ухудшения теплоотдачи:
![]()
Таким образом, предварительно выбранный двигатель проходит условие по нагреванию.
Определим загруженность двигателя:
![]()
8.2. Проверка двигателя по перегрузке.
Условие прохода двигателя по перегрузочной способности состоит в том, что максимальное рассчитанное значение момента двигателя на всех участках работы не должно превышать критического значения момента.
![]() – критическое значение момента двигателя:
– критическое значение момента двигателя:
![]()
![]() - момент двигателя на участке разгона.
- момент двигателя на участке разгона.
Сравним значения моментов:
![]()
Таким образом, предварительно выбранный двигатель проходит условие перегрузки двигателя.
9. Анализ динамических свойств электромеханического преобразователя, как объекта управления
Для анализа динамических свойств электродвигателя считаем, что:
· Привод работает на линейном участке механической характеристики.
· Между электродвигателем и механизмом существует абсолютно жёсткая механическая связь.
· Двигатель питается от преобразователя частоты, который обеспечивает постоянство магнитного потока.
· Электропривод работает при малых отклонениях от точки разложения.
При таких допущениях, можно считать, что рассматриваем одномассовую систему, которая описывается следующей системой уравнений.
![]() – момент двигателя;
– момент двигателя;
![]() – момент статической нагрузки;
– момент статической нагрузки;
![]() – суммарный момент инерции;
– суммарный момент инерции;
![]() – механическая скорость холостого хода:
– механическая скорость холостого хода:
![]()
![]() – электромагнитная постоянная времени:
– электромагнитная постоянная времени:
Где
– электрическая скорость холостого хода:
![]()
![]() – модуль статической жёсткости:
– модуль статической жёсткости:
![]()
![]()
Так как мы приняли, что работаем на линейном участке характеристики и
![]() , то можно считать, что
, то можно считать, что ![]() пренебрежимо мало, тогда:
пренебрежимо мало, тогда:
![]()
Таким образом, модуль статической жесткости будет равен:
![]()
Характер переходного процесса определяется отношением электромеханической постоянной времени ![]() и электромагнитной постоянной времени
и электромагнитной постоянной времени ![]() .
.
![]()
Найдем отношение постоянных времен:
![]()
Так как отношение механической постоянной времени ![]() и электрической постоянной времени
и электрической постоянной времени ![]() получилось больше 4, то переходный процесс будет апериодическим.
получилось больше 4, то переходный процесс будет апериодическим.
Покажем вид переходных процессов по управляющему и возмущающему воздействиям.
Схема моделирования в приложении Simulink
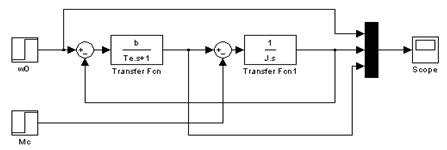
Рис.9.1
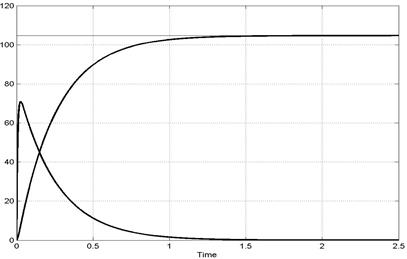
Переходный процесс по управляющему воздействию
|
|
|
|
![]() – график скорости в переходном режиме;
– график скорости в переходном режиме; ![]() – график момента в переходном режиме;
– график момента в переходном режиме; ![]()
![]()
Рис.9.2
Переходный процесс возмущающему воздействию
|
|
|
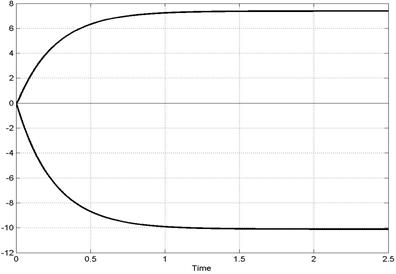
![]() – график скорости в переходном режиме;
– график скорости в переходном режиме; ![]() – график момента в переходном режиме;
– график момента в переходном режиме; ![]()
![]()
Рис.9.3
Так как электромагнитная постоянная времени много меньше механической постоянной времени ![]() , то электрическими переходными процессами можно пренебречь. В этом случае вид переходных процессов существенно не изменится.
, то электрическими переходными процессами можно пренебречь. В этом случае вид переходных процессов существенно не изменится.
Для наглядности показаны переходные процессы, как по управляющему, так и по возмущающему воздействиям на одном графике, но возмущающее воздействие ![]() подается осле завершения переходного процесса по управляющему воздействию.
подается осле завершения переходного процесса по управляющему воздействию.
Переходный процесс возмущающему и управляющему воздействиям
|
|
|
|
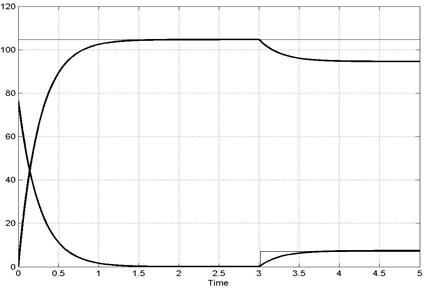
![]() – график скорости в переходном режиме;
– график скорости в переходном режиме; ![]() – график момента в переходном режиме;
– график момента в переходном режиме; ![]()
![]() ;
; ![]()
Рис.9.4
10. Выбор преобразователя частоты
При выборе преобразователя частоты для асинхронного двигателя, необходимо чтобы номинальные выходные напряжение и частота были равными номинальному напряжению и частоте асинхронного двигателя. Номинальный ток преобразователя должен превышать среднеквадратичный ток двигателя. Величина и длительность перегрузки по току не должны превышать значений указанных в технических данных преобразователя.
Так же при выборе преобразователя частоты необходимо учесть возможность реализации требуемого режима торможения. Так как мощность выбранного двигателя относительно не велика ![]() , то выбор преобразователя с возможностью реализации режима рекуперативного торможения будет экономически не выгоден. Поэтому для выбранного электродвигателя необходимо выбрать преобразователь частоты с наличием разрядного сопротивления.
, то выбор преобразователя с возможностью реализации режима рекуперативного торможения будет экономически не выгоден. Поэтому для выбранного электродвигателя необходимо выбрать преобразователь частоты с наличием разрядного сопротивления.
Таким образом, учтя выше приведенные факторы, для двигателя 4А80А6У3, был выбран преобразователь частоты Danfoss FC-302
Основные технические характеристики преобразователя частоты Danfoss FC-302:
· Мощность на выходе ПЧ – 1,1 кВт;
· Выходной ток – 3,0 А;
· Напряжение питания – 3![]() 380-480 В;
380-480 В;
· Максимальная выходная частота – 1000 Гц
· Перегрузочная способность:
a) 160% от номинального момента в течение 1 минуты (разгон);
b) 180% от номинального момента 0,5 с ( в момент пуска);
· Коэффициент мощности ![]() – 0,92 при номинальной нагрузке;
– 0,92 при номинальной нагрузке;
· Коэффициент мощности ![]() – более 0,98;
– более 0,98;
Исходя из перегрузочной способности преобразователя, пришлось выбрать преобразователь с мощностью большей, чем у двигателя. Таким образом, выбранный преобразователь частоты по техническим данным подходит к выбранному асинхронному двигателю.
Описание элементов силовой схемы преобразователя частоты:
UD – неуправляемый мостовой выпрямитель, реализованный на диодах ![]() .
.
UZ – Автономный инвертор напряжения с широтноимпульсной модуляцией. Состоит из 6 IGBT транзисторов (![]() и 6 обратных диодов (
и 6 обратных диодов (![]() . Диоды предназначены для обеспечения циркуляции реактивной энергии между обмотками АД и конденсатором
. Диоды предназначены для обеспечения циркуляции реактивной энергии между обмотками АД и конденсатором ![]() .
.
F – Фильтр, который сглаживает пульсации выпрямленного напряжения и служит устройством для накопления и отдачи энергии, что необходимо для обеспечения циркуляции реактивной мощности между обмотками АД и фильтром. Наличие конденсатора ![]() придает ПЧ свойство источника напряжения, позволяющего формировать, при использование ШИМ, близкую к синусоидальной форму кривой тока в статоре двигателя.
придает ПЧ свойство источника напряжения, позволяющего формировать, при использование ШИМ, близкую к синусоидальной форму кривой тока в статоре двигателя.
![]() – Разрядное сопротивление, которое подключается транзистором
– Разрядное сопротивление, которое подключается транзистором ![]() во время торможения, и на котором рассеивается энергия торможения
во время торможения, и на котором рассеивается энергия торможения
Силовая схема преобразователя частоты и подключенного к нему двигателя изображена на Рис.10.1
11. Заключение
В курсовом проекте был рассчитан электропривод механизма горизонтального перемещения крана-штабелера. По значению статической мощности на валу двигателя и по требуемым условиям к электроприводу в качестве электродвигателя был выбран асинхронный электродвигатель с короткозамкнутым ротором 4А80А6У3: номинальная мощность ![]() , скорость вращения ротора
, скорость вращения ротора ![]() . Двигатель приводит механизм в движение через двухступенчатый редуктор с передаточным числом
. Двигатель приводит механизм в движение через двухступенчатый редуктор с передаточным числом ![]() .
.
Выбранный электродвигатель был проверен по нагреву методом эквивалентного момента, а также был проверен по перегрузке. Для двигателя был выбран преобразователь частоты Danfoss FC-302 с напряжением питания 3![]() 380-480 В, и с выходным током 2,4 А. Так как мощность двигателя относительно мала, то экономически не выгодно использовать режим рекуперативного торможения, поэтому был выбран преобразователь частоты с возможностью установки тормозного резистора.
380-480 В, и с выходным током 2,4 А. Так как мощность двигателя относительно мала, то экономически не выгодно использовать режим рекуперативного торможения, поэтому был выбран преобразователь частоты с возможностью установки тормозного резистора.
Также в курсовом проекте был проведен анализ динамический свойств электропривода с линеаризованной механической характеристикой. Переходные процессы как по управляющему, так и по возмущающему воздействиям получились монотонными, так как отношение электромеханической постоянной времени ![]() и электромагнитной постоянной времени
и электромагнитной постоянной времени ![]()
![]() . Это можно объяснить тем, что масса механизма много больше массы электродвигателя, вследствие чего электромеханическая постоянная времени принимает относительно большое значение. Также в курсовом проекте представлены графики переходных процессов без учета электромагнитной постоянной времени
. Это можно объяснить тем, что масса механизма много больше массы электродвигателя, вследствие чего электромеханическая постоянная времени принимает относительно большое значение. Также в курсовом проекте представлены графики переходных процессов без учета электромагнитной постоянной времени ![]() , в силу ее малости (Рис.9.4). Сравнивая кривые, приведенные на рис.9.2 и рис.9.4 можно сделать вывод, что при анализе переходных процессов в разомкнутой системе электропривода при
, в силу ее малости (Рис.9.4). Сравнивая кривые, приведенные на рис.9.2 и рис.9.4 можно сделать вывод, что при анализе переходных процессов в разомкнутой системе электропривода при ![]() , как правило, можно без большой погрешности пренебрегать влиянием электромагнитной инерции и принимать
, как правило, можно без большой погрешности пренебрегать влиянием электромагнитной инерции и принимать ![]() .
.
|
1. Теория электропривода: Методические указания и типовые задания к проекту / сост. И. Я. Браславский, Е. Г. Казаков, В. П. Метельков. Екатеринбург: Изд-во УГТУ-УПИ, 2008. 69с.
2. Ключев В. И. Теория электропривода: Учеб. Для вузов. – 2-е изд. Переработ и доп. – М.: Энергоатомиздат, 1998. – 704 с.: ил.
3. Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учеб. заведений/ Г.Г. Соколовский. - М.: Издательский центр Академия, 2006. - 272 с.
4. Москаленко В. В. Электрический привод: учебник для студ. высш. учеб. заведений/В. В. Москоленко. – М.: Издательский центр «Академия», 2007. – 368 с.
5. Автоматизированный электропривод промышленных установок/Г. Б. Онищенко, М. И. Аксенов, В. П. Грехов и др. – М.: РАСХН – 2001. - 520 с:.:ил.
6. Ильиский Н. Ф., Москаленко В. В. Электропривод: энерго- и ресурсосбережение: учеб. пособие для студ. высш. учеб. заведений. – М.: Издательский центр «Академия», 2008. – 208 с.
7. ГОСТ 27142 – 97. Редукторы конические и коническо-целиндрические. Параметры. – М.: Издательство стандартов. 2001. – 4 с.
|
|
|