Варіаційні принципи механіки
СОДЕРЖАНИЕ: Рівненський державний гуманітарний університет Кафедра фізики Курсова робота на тему: иконав: студент курсу фізико - технологічного факультету групи ФТТ-51Рівненський державний гуманітарний університет
Кафедра фізики
Курсова робота на тему:
 Виконав:
Виконав:
студент V
курсу фізико -
технологічного факультету
групи ФТТ-51
Громов Микола Володимирович
Науковий керівник:
доц. Сідлецький Валентин Олександрович
Рівне–2000
Зміст
[1] сформулював без доведення один варіаційний принцип і застосував його в механіці й оптиці[2] . Утому ж самому році Л. Ейлер дав доведення цього інтегрального варіаційного принципу для випадку руху матеріальної точки в центральному силовому полі. Ж. Лагранж поширив цей принцип на широкий клас механічних рухів матеріальних систем, а Якобі[3] в 1842 p. поглибив теорію цього принципу. У сучасній літературі розглядуваний інтегральний варіаційний принцип відомий під назвою принципу Ейлера—Лагранжа.
У першій половині XIX ст. був відкритий новий інтегральний варіаційний принцип, який тепер справедливо називають принципом Остроградського—Гамільтона. Першу важливу працю з теорії цього принципу виконав М. В. Остроградський у 1829 p. і опублікував у 1831 p. Дальший крок вперед зробив В. Гамільтон у 1834 p.; він довів цей принцип для руху механічної системи в консервативному силовому полі. Цікаво, що відправним пунктом відповідних досліджень Гамільтона в механіці були його відкриття в галузі оптики. Виявилось, що існує глибокий звязок між законами механіки й законами оптики; цей звязок був використаний у ХХ ст. для побудови так званої хвильової механіки. У більш загальній формі принцип Остроградського—Гамільтона[4] в 1848 p. довів М. В. Остроградський. Перейдемо до розгляду допоміжних понять, необхідних для розуміння викладу варіаційних принципів.
Розділ І. Загальна характеристика принципів механіки
Принцип механіки — це аксіоматичне твердження, з якого як логічний наслідок випливає зміст механіки як науки.

Усі принципи механіки поділяються на неваріаційні і варіаційні. І ті й інші, у свою чергу, підрозділяються на диференціальні й інтегральні принципи (див. схему).
Неваріаційний принцип визначає властивості, що властиві усім рухам або в даний момент часу (диференціальний неваріаційний принцип) або на скінченому проміжку часу (інтегральний неваріаційний принцип).
Прикладом диференціального неваріаційного принципу є основний закон динаміки (другий закон Ньютона)
![]() (а)
(а)
Прикладом інтегрального неваріаційного принципу є закон збереження енергії
Н* = h. (b)
Класична механіка, є логічним наслідком принципу (а). Німецький учений Г. Гельмгольц (1821—1894) заклав основи механіки, що випливають із принципу (b).
Усі варіаційні принципи механіки дають відповідь на питання: чим відрізняється дійсний рух системи від інших рухів, що допускаються звязками, накладеними на систему?
Кінематично можливий рух системи, що допускається накладеними на неї звязками, називається рухом порівняння.
Варіаційний принцип указує характеристику дійсного руху системи, віднесену або до даного моменту часу, або до кінцевого інтервалу часу. У першому випадку він називається диференціальним, у другому — інтегральним варіаційним принципом.
Варіаційні принципи механіки визначають найбільш загальні закономірності механічних рухів і тому знаходять широке застосування в сучасній механіці і фізиці.
Принципи, що викладаються в цій роботі є логічними наслідками принципу (а). Тут вони наведені як універсальні методи розв’язування визначених задач динаміки і статики, хоча кожний з них можна розглядати як аксіоматичне твердження, з якого логічно випливає зміст механіки при тих обмеженнях, при яких справедливий той чи інший принцип.
1.1. Дійсний і уявні рухи для вільної матеріальної точки.
Нехай вільна матеріальна точка з масою т рухається під дією сили, що має силову функцію U (х, у, z, t ). Проекції сили на осі координат дорівнюють:
![]()
Координати точки змінюються за певними законами:
x=x(f), y=y(t), z==z(t). (1)
Нехай рухома точка в момент t 0 пройшла через положення А в просторі, а в інший момент t 1 t 0 —через положення В (рис. 1). Умовимось називати момент t 0 і положення А початковими, а момент t 1 і положення В—кінцевими. Рівняння (1) изначають рух точки т, який відбувається в дійсності, тобто за законами природи. Цей рух точки називатимемо дійсним її рухом.

Рис. 1
Разом з дійсним рухом вільної матеріальної точки розглядатимемо нескінченну множину уявних її рухів, які повинні задовольняти такі умови:
1) кожний уявний рух починається одночасно з дійсним рухом у момент t 0 і закінчується також одночасно з дійсним рухом у момент t 1 ;
2) кожний уявний рух починається з положення А, що є початковим для дійсного руху, і закінчується в положенні В, яке є кінцевим для дійсного руху.
Положення і швидкість точки в будь-якому з уявних рухів нехай відрізняються, відповідно, від положення і швидкості точки в її дійсному русі нескінченно мало в кожний момент часу.
Визначені переліченими вище ознаками уявні рухи є лише кінематично можливими, тоді як дійсний рух точки відбувається насправді під дією сил заданого силового поля.
Отже, поряд з дійсним рухом вільної матеріальної точки, який відбувається між положеннями А і В за проміжок часу ( t 0 , t 1 ), розглядатимемо нескінченно близькі до дійсного можливі її рухи, які всі відбуваються між тими самими положеннями А та В, між якими відбувається дійсний рух, і за той самий проміжок часу ( t 0 , t 1 ) .
Порівнювані з дійсним рухом уявні рухи вільної точки можна задати аналітичне так. Виберемо три довільні однозначні неперервні і диференційовані функції часу 1 ( t), 2 ( t), 3 ( t), нескінченно малий параметр і вважатимемо, що уявлюваний рух точки визначається координатами
![]() , (2)
, (2)
де час t змінюється від моменту t 0 до моменту t 1 . Швидкість точки в уявлюваному русі визначається трьома похідними по часу від координат
 (3)
(3)
Щоб уявний рух відбувався протягом того самого проміжку часу і між тими самими положеннями А та В, що й дійсний рух матеріальної точки, функції 1 ( t), 2 ( t), 3 ( t) треба підібрати так, щоб вони перетворювались в нуль у початковий і кінцевий моменти часу, тобто при t = t 0 і t = t 1 :
1 ( t 0 )= 2 ( t 0 )= 3 ( t 0 )=0, 1 ( t 1 )= 2 ( t 1 )= 3 ( t 1 )=0 (4)
При аналітичному визначенні уявних рухів ми здійснили малу зміну виду функцій x( f), y( t), z( t) , які описують дійсний рух. Ця зміна, яка полягає в переході від функцій x( t), y( t), z( t) до нових функцій
![]()
що нескінченно мало відрізняються від старих функцій, називається варіюванням функцій x( t), y( t), z( t) . Прирости функцій, що знаходяться в результаті варіювання, позначаються символом і називаються варіаціями функцій:
![]() (5)
(5)
Користуючись поняттям варіації, можна стверджувати: якщо дійсний рух точки відбувається за законом x= x( t), y= y( t), z= z( t) , то порівнювані з ним уявні кінематично можливі рухи відбуваються за законом
![]()
Оскільки вибір варіацій х, y, z довільний, то існує нескінченна множина уявних кінематично можливих рухів точки між заданими її положеннями.
1.2. Дійсний і уявні рухи для невільної матеріальної точки.
У випадку невільної матеріальної точки сформульовані вище в п.1.1. умови, які визначають клас кінематично можливих уявних рухів, слід доповнити ще однією: уявний рух точки повинен бути узгоджений з звязками, не повинен порушувати їх[5] . Тому всі попередні результати справедливі і для руху невільної матеріальної точки, якщо тільки в рівняннях руху точки використано незалежні узагальнені координати, які позначимо q1 , q2 (при одній ступені вільності матимемо лише одну координату q ). У цьому випадку, якщо дійсний рух точки визначається незалежними координатами q1 ( t) , q2 ( t) , то, аналогічно до попереднього, уявний кінематично можливий її рух буде характеризуватись функціями
![]()
Варіації координат тут дорівнюють ![]()
У випадку однієї ступені вільності уявний рух визначається однією координатою![]() . Варіація координати дорівнює
. Варіація координати дорівнює ![]()
1.3. Дійсний і уявні рухи для механічної системи.
Випадок системи не відрізняється принципово від зясованого вище випадку однієї матеріальної точки. Нехай дійсний рух невільної голономної механічної системи з п ступенями вільності визначається п незалежними координатами qk ( t) , ( k=1, 2, ..., п) . Уявний кінематично можливий її рух визначатиметься варійованими координатами
![]() , (6)
, (6)
де
— нескінченно малий параметр, a k
(
t
)
—
довільні функції. Ці функції слід вибирати так, щоб вони перетворювались в нуль на кінцях часового інтервалу (t
0,
t
1
), протягом якого розглядається рух системи. Варіації координат системи тут дорівнюють ![]() .
.
Отже, поряд з дійсним рухом механічної системи, який відбувається між положеннями А і В за проміжок часу (t 0, t 1 ), розглядаються нескінченно близькі до дійсного кінематично можливі (уявні) її рухи, які всі відбуваються між тими самими положеннями А та В, між якими відбувається дійсний рух і за той самий проміжок часу (t 0, t 1 ) та узгоджені з звязками системи.
Уявні рухи, що задовольняють ці вимоги, називатимемо можливими в розумінні Остроградського.
Доведемо тепер властивість комутативності варіювання і диференціювання, яку будемо використовувати нижче при розгляді принципу. Перепишемо (6) у вигляді ![]() ,
і продиференціюємо по часу:
,
і продиференціюємо по часу:
 (7)
(7)
Але за своїм змістом ліва частина цієї рівності є варіацією функції ![]() , тобто це є
, тобто це є![]() . Отже, з (7) знаходимо
. Отже, з (7) знаходимо
 , (8)
, (8)
що означає: операція диференціювання по незалежній змінній t і операція варіювання є комутативними.
1.4. Функція Лагранжа та її інтеграл у дійсному і уявному рухах.
Нехай при дійсному русі функція Лагранжа системи є L
(
q
,
q
, t),
а в уявному вона дорівнює ![]() [6]
,
де
[6]
,
де ![]()
Розкладаючи в ряд Тейлора, знайдемо
 (9)
(9)
Головна, лінійна відносно e, частина приросту функції L називається першою варіацією цієї функції, вона позначається L і дорівнює
![]()
Інші доданки ряду (9), які згруповано за степенями , називаються, відповідно, другою, третьою і т. д. варіаціями функції L і позначаються так:
2 L , 3 L, ..., k L,...
Функцію Лагранжа (9) для уявного руху можна подати тепер як ряд
 (10)
(10)
Ми дістали формулу, яка визначає функцію Лагранжа для уявного руху через функцію Лагранжа й її варіації в дійсному русі точки.
Щоб встановити аналогічну формулу для інтеграла від функції Лагранжа, помножимо ряд (10) на елементарний проміжок часу dt і проінтегруємо від моменту to до моменту t 1 . Матимемо:
 (11)
(11)
Інтеграл
 , (12)
, (12)
аргументом якого є функція q( t) , слід розглядати як фунаціонал [7] .
У співвідношенні (11) інтеграл лівої частини рівності є функціонал, обчислений для довільного уявного руху. Перший інтеграл правої частини –той самий функціонал, обчислений для дійсного руху точки. Другий інтеграл правої частини у формулі (11) є головною, лінійною відносно q (відносно ) частиною приросту цього функціоналу.
Головна, лінійна, частина приросту функціоналу називається першою його варіацією
і позначається
S
або  .
.
На підставі (11) і означення першої варіації функціоналу маємо:
 , (13)
, (13)
тобто операції інтегрування і варіювання комутативні (слід підкреслити, що доведена властивість справджується тільки за умови, що розглядаються уявні рухи у визначеному вище розумінні Остроградського, коли параметр t відіграє роль незалежної змінної).
Інші інтеграли правої частини формули (11) є послідовно так звані друга, третя і т. д. варіації функціоналу S, які позначаються так: 2
S,
3
S, ... .
Тому ряд (11) можна переписати у вигляді
 (14)
(14)
або у вигляді приросту функціоналу
 (15)
(15)
Розділ ІІ. Варіаційні принципи механіки
1.1 Принцип Остроградського-Гамільтона
Інтеграл із змінною верхньою границею
 (16)
(16)
називається дією за Остроградським. Розмірність дії є Дж с, тобто вона така сама, як розмірність сталої Планка h, що характеризує елементарний «квант дії».
Принцип Остроградського — Гамільтона формулюється так:
Дійсний рух механічної системи з голономними вязями відрізняється від усіх інших порівнюваних з ним кінематично можливих (у розумінні Остроградського) рухів тим, що для дійсного руху системи варіація дії за Остроградським, яку обчислено для довільного фіксованого проміжку часу, дорівнює нулю.
Принцип Остроградського — Гамільтона математично подається рівністю
 (17)
(17)
Для доведення обчислимо варіацію дії:
 (18)
(18)
Інтегруючи частинами, знайдемо:
 (19)
(19)
Доданок — ![]() тут дорівнює нулю в початковий і кінцевий моменти часу, бо
тут дорівнює нулю в початковий і кінцевий моменти часу, бо ![]() , а
, а ![]() (кінцеві точки траєкторій не варіюються).
(кінцеві точки траєкторій не варіюються).
Підставляючи (19) в (18), дістанемо:
 (20)
(20)
За рівнянням Лагранжа підінтегральна функція в (20) дорівнює нулю; тому S = 0 . Справедливість принципу доведена.
Якщо для функціонала S виконана умова S = 0 , то говорять, що значення S стаціонарне. Умова стаціонарності дії S = 0 вичерпно виражає закон руху механічної системи. Справді, вище показано, що з рівнянь руху Лагранжа випливає рівність S = 0 . Але і, навпаки, з умови S = 0 випливають рівняння Лагранжа. Так, з довільності q слідує, що для всіх t підінтегральна функція в (20) дорівнює нулю, тобто випливають рівняння Лагранжа.
Принцип стаціонарної дії Остроградського — Гамільтона інколи називають принципом найменшої (екстремальної) дії. Зясуємо походження цього терміну.
2.2. Принцип екстремальної (найменшої) дії
Аналізуючи формулу (15), приходимо до висновку, що значення дії S було б для дійсного руху мінімальним, якби виконувались разом умови
S=0 і 2 S=0 (21)
Справді, з формули (15) випливає, що при виконанні умов (21) ряд у правій частині (15) починається з другого доданку і знак S тоді такий самий, як і знак 2 S , тобто S0 для будь-яких уявних в розумінні Остроградського рухів.
Отже, дві умови (21) достатні для існування мінімуму дії S, тоді як умова стаціонарності S = 0 є лише необхідною умовою мінімуму дії S.
Можна довести, що друга варіація дії за Остроградським є додатньою в тому випадку, коли величина проміжку часу руху не перевищує певної границі, окремої для кожного розглядуваного руху.
Нагадаємо, що існування мінімуму дії означає: якщо порівняти числові значення інтегралів дії S
і S
– інтегралу дії для дійсного руху  із значенням інтегралу дії
із значенням інтегралу дії  для уявного кінематично можливого руху, то виявиться, що завжди S
S.
для уявного кінематично можливого руху, то виявиться, що завжди S
S.
Нерівність S S виконується незалежно від вибору уявного руху. Потрібно тільки, щоб кінцеві положення А та В та час уявних рухів ( t 0 , t 1 ) не відрізнялись від них для дійсного руху і щоб уявний рух був узгоджений з звязками.
Зміст принципу стаціонарної дії можна тлумачити ще й так:
дія S уявного руху (з числа допустимих) відрізняється від дії S для дійсного руху на нескінченно малу величину другого порядку, тоді як дія S одного уявного руху відрізняється від дії для другого уявного руху на нескінченно малу першого порядку.
На закінчення зробимо кілька загальних зауважень щодо переваг принципу Остроградського-Гамільтона порівняно з рівняннями руху системи, записаними в інших формах.
По-перше, рівняння (17) можна застосувати при якому завгодно способі вибору узагальнених координат системи. Властивість дії S бути мінімальною для дійсного руху не залежить від того, в яких координатах ведуть обчислення інтеграла 
По-друге, принцип Остроградського-Гамільтона виявляється справедливим і для систем з нескінченною множиною ступенів вільності.
Варіаційний принцип поширюється і на немеханічні фізичні процеси: теплові, електромагнітні і т. д.[8]
В основу теорії електромагнітного поля можна покласти варіаційний принцип, який є узагальненням принципу Остроградського-Гамільтона, і потім можна вивести з нього як наслідок основні рівняння електродинаміки – так звані рівняння Максвелла. Це виведення рівнянь Максвелла цілком аналогічне до способу виведення рівнянь Лагранжа з принципу Остроградського-Гамільтона в механіці.
2.3. Принцип стаціонарної дії Ейлера-Лагранжа
2.3.1. Вихідні положення принципу.
Цей варіаційний принцип не має такої загальності, як принцип Остроградського-Гамільтона. Принцип Ейлера-Лагранжа відповідає рухові механічної системи з стаціонарними звязками в потенціальному силовому полі. За цих умов (система консервативна) існує інтеграл енергії
T+V=h . (22)
Нехай у момент часу t 0 система пройшла через деяке положення А в просторі, а в інший момент t 1 – через положення В. Домовимось називати момент t 0 і положення А початковими, а момент t 1 і положення В — кінцевими.
Дійсний рух механічної системи порівнюватимемо з уявними її рухами, які повинні задовольняти такі три умови:
1) звязки системи не порушуються;
2) повна механічна енергія системи в будь-якому уявному русі незмінна протягом усього часу руху і дорівнює її значенню h у дійсному русі;
3) початкове й кінцеве положення механічної системи повинні бути одні й ті самі для всіх уявних рухів і саме такі, які є для дійсного руху.
Крім того, вважатимемо, що уявні рухи починаються одночасно і саме в той момент t0 , в який починається дійсний рух з положення А. Кінцевий момент часу, в який система опиниться в положенні В, у дійсному русі дорівнює t1 , а в уявних залежить від характеру руху і може відрізнятися від t1 на малу величину t (додатню або відємну).
Дійсний рух системи з уявними порівнюють так, що розглядають лише ті уявні рухи, які нескінченно близькі (за координатами й швидкостями) до дійсного руху.
Уявні рухи механічної системи, що задовольняють всі ці вимоги, називатимемо можливими в розумінні Ейлера — Лагранжа.
Переконаємось на прикладі в тому, що моменти приходу механічної системи в кінцеве положення В справді залежать від вибору уявного руху.
Розглянемо рух однієї матеріальної точки в стаціонарному силовому полі з потенціальною функцією V(х,у, z ) . Оскільки уявний рух відбувається з дотриманням закону збереження енергії, то для уявного руху маємо:
![]() звідки
звідки ![]() , (23)
, (23)
де V — значення потенціальної енергії точки в уявному русі:
V=V(х, у, z )
Формула (23) показує, що швидкість руху точки, а значить, і час переміщення її з початкового положення А в кінцеве положення В в уявному русі залежать від форми траєкторії.
2.3.2. Доведення принципу.
Нехай голономна система з стаціонарними звязками рухається в потенціальному силовому полі і V — потенціальна енергія. За вихідне візьмемо загальне рівняння динаміки у вигляді:
 (індекс k
опустимо):
(індекс k
опустимо):
 (24)
(24)
де ![]() –
елементарна робота активних сил на уявному переміщенні; х, у,
z –
варіації координат точок системи. За правилом диференціювання маємо:
–
елементарна робота активних сил на уявному переміщенні; х, у,
z –
варіації координат точок системи. За правилом диференціювання маємо:
 (25)
(25)
У розглядуваному випадку не тільки координати х,у,г
,
a
й час t
варіюються. Це видно з того, що час приходу системи в кінцеве положення в уявному русі, як зясовано вище, залежить від вибору траєкторії. Тому параметр t
тут не можна розглядати як незалежну змінну, що не варіюється. Це означає, що рівність ![]() яка вище була доведена для випадку, коли t
не варіюється, тут не справджується. Згадану рівність слід замінити новою.
яка вище була доведена для випадку, коли t
не варіюється, тут не справджується. Згадану рівність слід замінити новою.
Нову формулу для ![]() в розглядуваному загальному випадку легко знайти, вводячи нову незалежну змінну s
, від якої, за припущенням, залежать х і
t
(s
може бути, наприклад, дугою траєкторії точки). Оскільки властивості варіації аналогічні властивостям диференціалу, то за тими самими правилами, що й для диференціалу, знаходимо:
в розглядуваному загальному випадку легко знайти, вводячи нову незалежну змінну s
, від якої, за припущенням, залежать х і
t
(s
може бути, наприклад, дугою траєкторії точки). Оскільки властивості варіації аналогічні властивостям диференціалу, то за тими самими правилами, що й для диференціалу, знаходимо:
 (26)
(26)
де штрих означає похідну по незалежній змінній s. У формулі (26) x
,
t
можна обчислити за правилом ![]() тому що
тому що ![]() –
похідні по незалежній
змінній s. Тому
–
похідні по незалежній
змінній s. Тому
 (27)
(27)
З формул (26) і (27) знаходимо
або, коли зробити заміну![]() та виключити незалежну змінну s,
яка вже відіграла свою допоміжну роль, дістанемо:
та виключити незалежну змінну s,
яка вже відіграла свою допоміжну роль, дістанемо:
або
 (28)
(28)
Ця формула і є узагальненням рівності (8) на випадок, коли варіюються обидві функції х і t . Аналогічно, вводячи незалежну змінну s , обчислимо варіацію інтеграла:
У правій частині підінтегральний вираз можна розглядати як складну функцію незалежної змінної s; межі інтегрування по змінній s вважаються фіксованими. За таких умов операції d і f комутативні [див. (13)]:
![]() (29)
(29)
Обчисливши варіацію добутку двох функцій і підставивши це значення в (29), отримаємо:
 (30)
(30)
Ця формула є узагальненням рівності (13) на випадок, коли змінна інтегрування варіюється.
Після встановлення двох нових формул (28) і (30) для варіацій продовжимо доведення принципу Ейлера — Лагранжа. На підставі (28) рівність (25) перепишемо так:
 .
.
Використовуючи цю і дві аналогічні рівності, знайдемо з (24):
 (31)
(31)
Третій і четвертий доданки можна переписати, використовуючи формули для кінетичної енергії системи та її варіації, а саме:
Відповідна заміна (в (31)) дає:
 (32)
(32)
На підставі закону збереження енергії Т + V = Н знаходимо, що V = T . Ліву частину (32) перетворимо і тоді (32) буде:
 (33)
(33)
Виключимо далі з лівої частини цієї рівності час на підставі закону збереження енергії:

звідки
 (34)
(34)
Підставимо (34) в (33) і напишемо індекси, які раніше опускали; в результаті дістанемо:
 (35)
(35)
Проінтегруємо цю рівність у дійсному русі системи від початкового її положення (А) до кінцевого (В). Інтеграл від правої частини дорівнює нулю, бо кінцеві положення системи в уявному русі такі самі, як і в дійсному (координати кінцевих положень не варіюються). Отже, з (35) знаходимо:
або, оскільки межі інтегрування фіксовані:
 (36)
(36)
Ця рівність визначає принцип Ейлера—Лагранжа у формі, яку вказав Якобі.
Інтеграл із змінною верхньою границею М
 ) (37)
) (37)
називається дією системи за Якобі.
Принцип Ейлера—Лагранжа формулюється так:
Дійсний рух механічної системи з стаціонарними голономними звязками в потенціальному силовому полі відрізняється від усіх інших, порівнюваних з ним кінематично можливих (у розумінні Ейлера-Лагранжа) рухів тим, що для довільних двох фіксованих положень системи перша варіація дії за Якобі для дійсного руху дорівнює нулю.
У випадку однієї матеріальної точки, яка рухається при стаціонарних звязках у стаціонарному силовому полі, дія за Лагранжем у формі Якобі матиме вигляд:
 )
)
або
 (38)
(38)
Зупинимось коротко на тлумаченні змісту принципу Ейлера-Лагранжа. У формі (36) ніяких труднощів у розумінні змісту принципу не виникає, тому що відповідний інтеграл у (36) має простий геометричний зміст (інтегрування ведеться по дугах траекторій точок системи між фіксованими її положеннями). Зміст цього принципу розкривається цілком аналогічно тому, як це зроблено раніше для принципу Остроградського—Гамільтона:
дія за Якобі (37), обчислена між двома фіксованими положеннями системи, в дійсному русі найменша. Ми можемо тут говорити про мінімальне значення дії (37) для дійсного руху між двома фіксованими положеннями системи, бо й тут можна довести, що друга варіація дії додатна, якщо тільки кінцеве положення системи В не дуже далеке від її початкового положення А.
2.4. Принцип віртуальних переміщень
2.4.1. Віртуальні, можливі та дійсні переміщення.
Кожен варіаційний принцип механіки вказує ознаку, що відрізняє дійсний рух системи від інших рухів, що допускаються звязками, накладеними на точки системи, – рухів порівняння.
Щоб встановити цю ознаку відповідно до принципу Даламбера-Лагранжа, введемо поняття віртуальних переміщень.
Розглянемо невільну систему матеріальних точок.
Віртуальними переміщеннями точок системи називаються одночасні, миттєві, малі переміщення точок системи, що не суперечать звязкам.
З визначення видно, що віртуальні переміщення — поняття чисто кінематичне, тому що вони не залежать від сил, що діють на точки системи. Сили також не змінюються при наданні точкам системи віртуальних переміщень. Позначимо віртуальні переміщення ![]() .
.
Зясуємо взаємозвязок між віртуальними переміщеннями і дійсними переміщеннями, які точки системи здійснюють під дією прикладених сил. З цією метою введемо поняття можливих переміщень. На відміну від віртуальних переміщень вони відбуваються в часі. Розглянемо приклад.
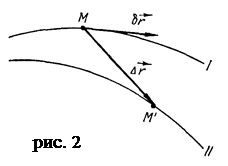 Нехай кільце М, розглянуте як матеріальна точка, ковзає по стержню, що переміщується в просторі (рис. 2). Звязки, що змінюють своє положення в просторі зі зміною часу, називаються, як відомо, нестаціонарними. Оскільки стержень переміщується, для знаходження віртуальних переміщень кільця потрібно зупинити стержень, тобто розглянути положення його у фіксований момент часу. Віртуальні переміщення визначаються вектором, спрямованим по дотичній до стержня. Нехай за час
T
стержень перемістився з положення І у положення ІІ. Кільце М при цьому займе положення М. Переміщення називаємо можливим. Можливі переміщення також є довільними. Розходження між віртуальними і можливими переміщеннями обумовлено переміщенням стержня.
Нехай кільце М, розглянуте як матеріальна точка, ковзає по стержню, що переміщується в просторі (рис. 2). Звязки, що змінюють своє положення в просторі зі зміною часу, називаються, як відомо, нестаціонарними. Оскільки стержень переміщується, для знаходження віртуальних переміщень кільця потрібно зупинити стержень, тобто розглянути положення його у фіксований момент часу. Віртуальні переміщення визначаються вектором, спрямованим по дотичній до стержня. Нехай за час
T
стержень перемістився з положення І у положення ІІ. Кільце М при цьому займе положення М. Переміщення називаємо можливим. Можливі переміщення також є довільними. Розходження між віртуальними і можливими переміщеннями обумовлено переміщенням стержня.
При нестаціонарних звязках дійсне переміщення збігається з одним зі можливих.
 Якщо звязки не змінюють свого положення в просторі з часом, вони називаються, як відомо, стаціонарними
. У випадку стаціонарних звязків розходження між віртуальними і можливими переміщеннями немає і дійсне переміщення системи збігається з одним з віртуальних. Принцип віртуальних переміщень є наслідком визначення віртуальних переміщень і деяких властивостей звязків.
Якщо звязки не змінюють свого положення в просторі з часом, вони називаються, як відомо, стаціонарними
. У випадку стаціонарних звязків розходження між віртуальними і можливими переміщеннями немає і дійсне переміщення системи збігається з одним з віртуальних. Принцип віртуальних переміщень є наслідком визначення віртуальних переміщень і деяких властивостей звязків.
Розглянемо такі види фізичних звязків: поверхня, абсолютно твердий стержень і гнучка нерозтяжна нитка. Ці три види звязків, різні по своїй фізичній природі, мають одну загальну аналітичну властивість.
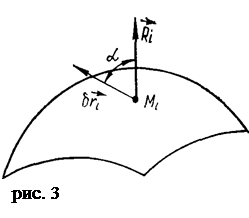
Нехай звязком для системи матеріальних точок є ідеально гладка поверхня. Відомо, що реакція такого звязку спрямована по нормалі до поверхні (див. рис. 3) у ту частину простору, що не містить речовини звязку.
Надамо точці системи Mi
, можливе переміщення ![]() приймаючи до уваги непроникність речовини звязку. Кут між реакцією звязку і можливим переміщенням змінюється у межах
приймаючи до уваги непроникність речовини звязку. Кут між реакцією звязку і можливим переміщенням змінюється у межах ![]() . Тоді елементарна робота, виконана реакцією звязку на віртуальних переміщеннях, буде позитивною:
. Тоді елементарна робота, виконана реакцією звязку на віртуальних переміщеннях, буде позитивною:
![]() (а)
(а)
Написавши співвідношення (а) для всіх точок системи і просумувавши їх, одержимо
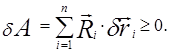 (
b)
(
b)
Знак нерівності має місце в тому випадку, коли можливе переміщення таке, що воно зводить точки системи зі звязку.
Звязок, який точки системи можуть залишити при наданні їм віртуальних переміщень, називається неутримуючим. Розглянута поверхня являє приклад такого звязку. Якщо на поверхню накласти ще одну поверхню, то точкам системи не можна надати переміщення, що усувають їх звязки.
 Звязок, який точки системи не можуть залишити при наданні їм віртуальних переміщень, називається утримуючим
.
Звязок, який точки системи не можуть залишити при наданні їм віртуальних переміщень, називається утримуючим
.
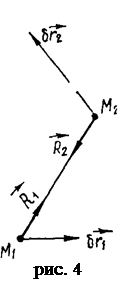
Розглянемо приклад, коли звязком для точок М1 і М2 є ідеальний стержень. Надамо точкам віртуальні переміщення (рис. 4) і знайдемо роботу реакцій на цих переміщеннях.
![]() (с)
(с)
Знаку нерівності, у співвідношенні (с) немає, тому що точки не можуть робити переміщень, при яких вони залишають звязок. Таким чином, стержень є утримуючим звязком.
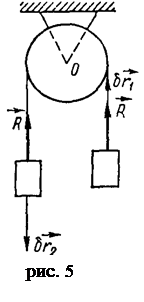
Розглянемо, також, гнучку нерозтяжну нитку, перекинену через блок і утримуючу вантажі (рис. 5).
На підставі принципу Даламбера можна переконатися в тому, що при різних вагах вантажів, якщо знехтувати тертям на осі і масою блоку, сили натягу різних кінців нитки будуть однакові. Позначимо їх ![]() . Нитка допускає всі переміщення, крім тих, котрі її подовжують. Надамо вантажам віртуальні переміщення, при яких нитка залишається натягнутою:
. Нитка допускає всі переміщення, крім тих, котрі її подовжують. Надамо вантажам віртуальні переміщення, при яких нитка залишається натягнутою: ![]() . Тоді
. Тоді
![]() (d)
(d)
Надамо тепер віртуальні переміщення, при яких нитка не буде натягнута (вантажі залишають звязок): ![]() . Тоді
. Тоді
![]() (e)
(e)
Отже, усі розглянуті звязки володіють однією загальною властивістю: робота, виконана їх реакціями на віртуальних переміщеннях, не від’ємна. Це дозволяє обєднати фізично різні звязки в єдиний клас ідеальних звязків.
Звязки називаються ідеальними, якщо сума елементарних робіт, вироблених їхніми реакціями на віртуальних переміщеннях точок системи, не негативні:
(39)
Знак нерівності має місце при наданні точкам системи віртуальних переміщень, що звільняють ці точки від неутримуючих звязків. Якщо серед віртуальних переміщень немає таких, котрі звільняють точки системи від звязків, то знак нерівності в співвідношенні (39) зникає,
 (40)
(40)
Співвідношення (39) чи (40) приймаємо як аналітичні визначення ідеальних звязків.
2.4.2. Принцип Даламбера — Лагранжа.
Користаючись аналітичним визначенням ідеальних звязків (39), доведемо принцип Даламбера — Лагранжа:
у кожен момент часу дійсний рух системи, яка підчиняється ідеальним звязкам, відрізняється від руху порівняння тим, що тільки для нього сума елементарних робіт активних сил і сил інерції на будь-яких віртуальних переміщеннях точок системи непозитивна.
Маємо систему n матеріальних точок M1 , M2 , ..., Mn яка підчиняється ідеальним звязкам. На основі принципу Даламбера маємо для неї наступні рівності:
![]() (а)
(а)
Надамо точкам системи віртуальні переміщення. Тоді на підставі рівностей (а) знаходимо
чи
 (
b)
(
b)
Система підлегла ідеальним звязкам, тому тут останній доданок, відповідно до співвідношення (39), не невід’ємний. Рівність (b) приймає вигляд:
 (41)
(41)
і виражає принцип Даламбера — Лагранжа.
Якщо умовитися розглядати тільки такі віртуальні переміщення, що залишають точки системи на звязках, одержимо загальне рівняння динаміки
Як наслідок з цього рівняння можна одержати диференціальні рівняння руху і загальні теореми динаміки. Цю особливість загального рівняння динаміки уперше відзначив Ж. Лагранж.
Методичне значення загального рівняння динаміки полягає в тому, що воно для більшості задач динаміки дозволяє визначити закон руху, не визначаючи реакції звязків. У разі потреби реакції звязків можна визначити на другому етапі, після визначення закону руху системи, застосовуючи, наприклад, принцип ДАламбера.
2.4.3. Принцип віртуальних переміщень (принцип Лагранжа).
Якщо система знаходиться в рівновазі, то сили інерції дорівнюють нулю:
![]()
Рівність (41) приймає вид
 (42)
(42)
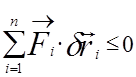
і виражає принцип віртуальних переміщень (принцип Лагранжа): положення рівноваги системи, яка підпорядкована ідеальним звязкам, відрізняється від суміжних положень, що допускаються звязкам і тому тільки для нього сума елементарних робіт активних сил, що діють на точки системи, на будь-яких віртуальних переміщеннях точок системи не позитивна.
Знак нерівності в співвідношенні (42) має місце в тому випадку, коли серед накладених звязків є неутримуючі, а серед віртуальних переміщень є переміщення, що звільняють точки системи від звязків. Якщо розглядати тільки такі віртуальні переміщення, що не звільняють точки системи від накладених звязків, то знак нерівності в співвідношенні (42) зникає й одержуємо загальне рівняння статики
 (43)
(43)
Термін «загальне рівняння статики» обумовлений тим, що з нього можна одержати умови рівноваги вільного твердого тіла і всі віртуальні умови рівноваги системи тел.
Застосування загального рівняння статики (43) особливо ефективно при розгляді рівноваги системи тел. Ця ефективність обумовлена тим, що ліва частина рівняння (43) містить тільки активні сили, що дає віртуальність не складати рівняння, що містять реакції, що не підлягають визначенню. Якщо є сили тертя, то їх відносять до активних сил.
2.5. Оптико-механічна аналогія (принцип Мопертюї-Ферма)
Аналогію між механікою точки і теорією хвильового процесу простежимо на прикладі вільної матеріальної точки, що рухається в однорідному полі сили тяжіння.
Як узагальнені координати вибираємо декартові координати: q1 = , q2 = у, q3 = z . Відповідні ним узагальнені імпульси наступні: p1 = рx , р2 = ру , р3 = рг . Точка вільна, тому узагальнена механічна енергія Н* дорівнює повній механічній енергії == Т + . Направляючи декартову вісь Оz по вертикалі вгору, знаходимо
![]() (а)
(а)
Залежності між узагальненими швидкостями й узагальненими імпульсами мають вигляд:
![]() (b)
(b)
У рівність (а) підставляємо узагальнені швидкості, отримані з рівнянь (b). Знаходимо гамильтоніан розглянутої точки:
![]() (с)
(с)
Точка має часову симетрію, тому що час t не входить явно у функцію Н . Рівняння Остроградского — Гамільтона — Якобі знаходимо:
 (d)
(d)
З рівності (d) видно, що точка має просторову симетрію по координатах і y . Узагальнені імпульси, що відповідають цим координатам, залишаються постійними;
![]() (е)
(е)
![]()
тут a1 і a2 : — постійні значення узагальнених імпульсів рx і рy відповідно.
З рівностей (е) випливає, що функція W лінійно залежить від координат і y . Тому рішення рівняння (d) шукаємо у вигляді:
W = 1 + а2 у + f(z), (f)
де f(z) – невідома функція. Вираз (f) підставляємо в рівняння (d), знаходимо звичайне диференціальне рівняння першого порядку щодо функції f(z) :
![]()
Звідси знаходимо
![]() (g)
(g)
На підставі формул (f) і (g) визначаємо характеристичну функцію
![]() (h)
(h)
де
Визначаємо перші інтеграли канонічних рівнянь динаміки:
![]() (
i)
(
i)
![]()

 (J)
(J)
![]() (k)
(k)
Тут рівності (i) — проміжні інтеграли, що визначають узагальнені імпульси розглянутої точки. Геометричні інтеграли (j) визначають сімейство просторових кривих — можливих траєкторій точки, що є лініями перетинання параболічних циліндрів з утворюючими, рівнобіжними осям Оу й Ох відповідно. Кінематичний інтеграл (k) дозволяє визначити кінематичні рівняння руху точки:

Отримане рішення містить шістьох постійних інтегрування, обумовлених заданням початкових значень гамільтонових змінних. Крім того, геометричні інтеграли визначають всю сукупність можливих траєкторій точки. Такою спільністю не володіє розв’язок, отриманий для цієї задачі по методу Лагранжа.
Щоб відзначити ще одне достоїнство отриманого рішення згадаємо закон геометричної оптики: в оптично неоднорідному середовищі світловий промінь поширюється по кривій, дотична до якої в кожній точці збігається з нормаллю до хвильової поверхні, що проходить через цю точку.- цей закон ще називається оптико-механічним принципом Мопертюї-Лагранжа.
Доведемо, що аналогічною властивістю володіє сімейство траєкторій (j) і сімейство поверхонь:
W=const (l)
де W — характеристична функція (h).
Для доказу перепишемо рівняння (j) і (1) у такий спосіб:
![]() (n)
(n)
Рівняння дотичної до кривої, що описується рівняннями (m), має наступний вигляд:
![]() (о)
(о)

Рівняння нормалі до поверхні, яка описується рівнянням (n),
 (р)
(р)
Необхідно довести рівності
![]()
![]()
![]() (q)
(q)
Обчисливши, знаходимо:
На підставі отриманих виражень переконуємося в справедливості рівностей (q).
Доведена тут аналогія руху матеріальної точки в поле сили ваги з хвильовим процесом має місце й у випадку руху вільної матеріальної точки в стаціонарному центрально-симетричному полі із силовою функцією U(r). У цій аналогії некласична механіка знайшла базу для ймовірнісного і статистичного тлумачення хвильової механіки.
Висновки
Варіаційні принципи механіки – це положення, що встановлюють властивості рухів, які фактично здійснюються під дією заданих сил, рух (стан рівноваги) механічної системи відрізняється від всіх її кінематично можливих рухів (станів), і які дозволяють отримати в якості наслідків рівння рухів або рівноваги системи..
Варіаційні принципи механіки визначають найбільш загальні закономірності механічних рухів і тому знаходять широке застосування в сучасній механіці і фізиці. Ряд цих принципів виражає властивості мехінічних систем у вигляді, який дозволяє розповсюдити принципи на інші області фізики.
Принципи, що були розглянуті в цій роботі, наведені в ній як універсальні методи вирішення визначених задач динаміки і статики, хоча кожний з них можна розглядати як аксіоматичне твердження, з якого логічно випливає зміст механіки при тих обмеженнях, при яких справедливий той чи інший принцип.
Література .
1. Бугаєнко Г.О. Курс теоретичної механіки. – Київ, 1968. – 367 с.
2. Кильчевский Н.А., Ремизова Н.И., Кильчевская Е.Н. Основы теоретической механики.– К, 1986. – 295 с.
3. Ландош К. Вариационные принципы механики. – М.: Мир, 1965.
[1] Мопертюї (1698—1759) керував Берлінською Академією наук, займався астрономією і механікою.
[2] Є дані про те, що видатний математик Лейбніц в одному з своїх листів сформулював відповідний принцип ще в 1707 p.
[3] Якобі Карл (1804—1851) був професором Кенігсберзького університету. Він дав теорію перетворення еліптичних інтегралів (8-функції Якобі), дістав фундаментальні результати в галузі диференціальних рівнянь з частинними похідними і розробив метод інтегрування диференціальних рівнянь небесної механіки. Головні з цих методів викладені в його «Лекціях з динаміки». (Є російський переклад 1936 p.).
[4] У зарубіжній літературі цей принцип відомий під назвою принципу Гамільтона.
[5] Наприклад, для матеріальної точки, що рухається по заданій поверхні, кожний уявний рух повинен відбуватись на тій же поверхні.
[6]
Розгляд випадку системи з п
ступенями вільності, де п
1 по суті не відрізняється від випадку
п
= 1, який подано в тексті.
[7] Змінна величина І називається функціоналом, що залежить від функції х( t), якщо кожній функції x( t) з деякого класу функцій відповідає певне значення І , тобто кожній функції х(t) відповідає певне число І .
[8] За межами механіки функція Лагранжа L часто виступає вже як вихідна, бо там поняття кінетичної і потенціальної енергій не скрізь можуть бути введені.