Исследование емкостно-диодной измерительной схемы
СОДЕРЖАНИЕ: МИНИСТЕРСТВО НАУКИ И ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ Государственное образовательное учреждение высшего профессионального образования УЛЬЯНОВСКИЙ ГОСУДРАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТМИНИСТЕРСТВО НАУКИ И ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Государственное образовательное учреждение высшего профессионального образования
УЛЬЯНОВСКИЙ ГОСУДРАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра «Измерительно-вычислительные комплексы»
Курсовая работа
по дисциплине «Технология измерительного эксперимента»
на тему: «Исследование емкостно-диодной измерительной схемы»
Выполнил студент группы МПд – 51
Саушкин А.И.
Проверил преподаватель
Шивринский В.Н.
Ульяновск 2010
Оглавление.
| Введение |
3 |
| 2). Постановка задачи |
4 |
| 2.1. Обзор существующих емкостно-диодных схем и преобразователей |
4 |
| 3). Подготовка измерений |
17 |
| 3.1. Подготовка алгоритмов решения задачи измерения |
17 |
| 3.2. Методы уменьшения погрешностей измерения, выявление и устранение причин возникновения погрешностей |
18 |
| 3.2.1. Метод инвертирования |
20 |
| 3.2.2. Метод замещения |
21 |
| 3.2.3. Метод вспомогательных измерений |
23 |
| 3.2.4. Метод симметричных наблюдений |
23 |
| 3.3. Построение технологической карты для обобщенной программы подготовки к проведению измерений |
24 |
| 4). Проведение эксперимента |
28 |
| 4.1. Построение обобщенной программы для проведения измерений |
30 |
|
5). Обработка результатов измерений |
32 |
| 5.1. Построение технологической карты для обобщенной программы обработки результатов измерений. |
33 |
| 6). Оформление результатов измерений |
34 |
| Заключение |
39 |
| Список литературы |
40 |
Введение
Современная информационно-измерительная техника располагает средствами измерения различных физических величин – электрических, магнитных, тепловых, акустических, механических и т. д.
Подавляющее большинство этих величин в процессе измерения преобразуется в величины электрические, как наиболее удобные для передачи, усиления, математической обработки и точного измерения. Поэтому в современной измерительной технике находят широкое применение преобразователи разного рода физических величин в электрические величины.
Измерительное преобразование представляет собой отражение размера одной физической величины размером другой физической величины, функционально с ней связанной. Применение измерительных преобразований является единственным методом практического построения любых измерительных устройств. Измерительный преобразователь – это техническое устройство, построенное на определенном физическом принципе действия, выполняющее одно частное преобразование.
В данной курсовой работе рассматривается и исследуется емкостно – диодная измерительная схема преобразователей перемещения и уровня. Подробно описан принцип работы и область применения. Даны амплитудно – частотные характеристики схемы.
Постановка задачи
Обзор существующих емкостно-диодных схем и преобразователей.
Электростатический преобразователь (ЭС) представляет собой два или несколько тел, между которыми действует электрическое поле.
Простейший ЭС содержит два электрода площадью S , параллельно расположенных на расстоянии d в среде с диэлектрической проницаемостью e .
С электрической стороны преобразователь характеризуется напряжением U между пластинами, током
i = dq/dt (1)
зарядом
q = CU (2)
где С – емкость, равная при плоскопараллельном расположении пластин
C = e S / d (3)
энергией электрического поля
W э = qU /2 = CU 2 /2 (4)
Если одна из пластин (или диэлектрик между ними) имеет возможность перемещаться, то с механической стороны преобразователь характеризуется жесткостью подвеса подвижной пластины w , перемещением ее x , скоростью перемещения
v = dx / dt (5),
электростатической силой притяжения
f эс = dW э / dx (6)
В качестве ЭС преобразователей используются также запертые p – n - переходы: p - и n - области играют роль пластин, разделенных обедненным слоем, ширина d которого возрастает при увеличении запирающего напряжения.
Взаимосвязь механической и электрической сторон преобразователя отражается уравнениями:
dF = wx + E0 C0 u (7);
dq = E0 C0 x + C0 u (8).
Эти уравнения даны в предположении, что u и x малы по сравнению с начальными напряжением и зазором и, следовательно, емкость C 0 и напряженность поля E 0 постоянны. Из приведенных уравнений видно, что любое воздействие с механической стороны меняет электрическое состояние преобразователя и, наоборот, изменение электрического поля приводит к изменению механических характеристик. Коэффициент электромеханической связи k эм = E 0 C 0 (9). Эта взаимосвязь должна учитываться при применениях ЭС преобразователей.
Таким образом, изменение емкости посредством механических воздействий можно производить путем изменения зазора d , площади S , материала диэлектрика (e), а также изменения e за счет механических деформаций диэлектрика.
Выходной величиной электростатического преобразователя может быть:
а) изменение емкости C
б) сила f эс
в) ЭДС , генерируемая при взаимном перемещении электродов, находящихся в электрическом поле.
Для ЭС преобразователей, в которых изменяется емкость, входными величинами могут быть механическое перемещение, изменяющее зазор или площадь, или изменение диэлектрической проницаемости e под действием изменения температуры или состава диэлектрика.
Эквивалентная схема ЭС преобразователя, схематическая конструкция которого показана на рис. 1, а, приведена на рис. 1, б. В эквивалентной схеме учитываются емкость C 0 между электродами 1 и 2 , сопротивление R ут изоляции между электродами, сопротивление r и индуктивность L кабеля К , а также паразитная емкость C П между электродами и заземленными деталями конструкции и между жилой кабеля К и его заземленным экраном Э .
Влияние отдельных элементов схемы учитывается в зависимости от конкретных обстоятельств. Так, при работе на низкой частоте сопротивление конденсатора велико и влияние индуктивности и сопротивления ввода не сказывается. При работе на высоких частотах сопротивление конденсатора падает, и большую роль начинают играть индуктивность и сопротивление ввода, в то время как шунтирующее действие сопротивления утечки перестает сказываться. В этом случае удобнее последовательная эквивалентная схема преобразователя (рис. 1, в), где
r экв = r и Сэкв = С0 + СП (10)
Влияние сопротивления утечки может выть учтено соответствующей добавкой в сопротивлении
r экв = r + 1/ ( w 2 C 2 экв R ут ) (11)
Эффективная емкость С w на высокой частоте оказывается за счет индуктивности L больше емкости Сэкв ибо
С w = C экв /(1 – w 2 LC экв ) (12)
Действие индуктивности токоподводов начинает сказываться обычно на частотах свыше 10 МГц.
В эквивалентной схеме ЭС преобразователя с диэлектриком должны быть учтены потери в последнем. Из-за потерь в ЭС преобразователе сдвиг фаз между напряжением и током оказывается меньше p/2 на угол потерь d.
Последовательная и параллельная схемы, учитывающие потери в диэлектрике, представлены на рис. 1, г. Эквивалентные сопротивления для этих схем выражают часто через приводимый в справочных данных тангенс угла потерь d как
R 1экв = tg d / ( wC 1экв ) или R 2экв = 1/( w 2экв tg d ). (12)
Емкости С1экв и С2экв связаны между собой зависимостью
С2экв = С1экв /(1+ tg d ), (13)
и, так как обычно tg1, можно считать приблизительно равными:
С1экв = C 2экв = Сэкв .
В образцовых воздушных конденсаторах tg d не превышает 5*10 –5 , так как определяется только потерями в изоляции и в материале электродов.
В конденсаторах с диэлектриком угол потерь значительно больше и, кроме того, может зависеть от напряжения на конденсаторе, частоты, температуры и влажности.
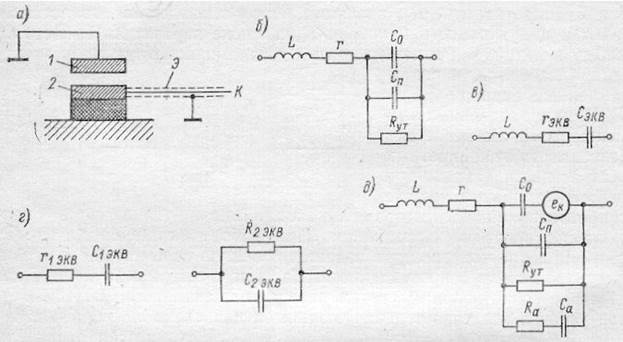 |
В некоторых случаях при наличии диэлектрика между электродами преобразователя приходится считаться с тем, что после поляризации диэлектрики еще в течение какого-то времени (0,1 – 2 с) сохраняют заряд (абсорбция), что приводит к остаточным напряжениям, достигающим нескольких процентов от значения приложенного напряжения. Влияние абсорбции в эквивалентной схеме конденсатора в первом приближении можно учесть включением параллельно емкости С0 цепочки, состоящей из емкости Са и сопротивления R а . Поэтому полная эквивалентная схема ЭС преобразователя может быть представлена в виде рис. 1, д .
Рис. 1 Эквивалентная схема ЭС преобразователя
Конструкции емкостных преобразователей. На рис. 2 показано устройство емкостного преобразователя для измерения уровня. Преобразователь состоит из двух параллельно соединенных конденсаторов: конденсатор С1 образован частью электродов и диэлектриком – жидкостью, уровень которой измеряется; конденсатор С0 - остальной частью электродов и диэлектриком – воздухом. Емкость преобразователя
![]() (14)
(14)
где l 0 - полная длина цилиндра; l – длина на которую цилиндр заполнен жидкостью; e - диэлектрическая проницаемость жидкости; R1 и R2 - радиусы внешнего и внутреннего цилиндров.
На рис. 2,б изображен емкостный зонд для измерения уровня проводящей жидкости. Емкостный зонд был предложен для измерения высоты волн и представляет собой остеклованный электрод 1 . Электродом 2 служит проводящая жидкость, которая присоединяется к измерительной цепи при помощи электрода 3 . Емкость
![]() (15)
(15)
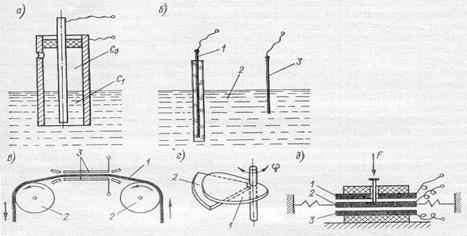 |
где l – глубина погружения; e - диэлектрическая проницаемость стекла; R1 и R2 – внешний и внутренний радиусы стеклянного покрытия. Вместо специального электрода может быть кусок провода, покрытого изоляцией, не смачиваемой жидкостью.
Рис. 2. Конструкции емкостных преобразователей
На рис. 2, в показан принцип устройства емкостного преобразователя для измерения толщины ленты из диэлектрика. Испытуемая лента 1 протягивается с помощью роликов 2 между обкладками 3 конденсатора. Если длину зазора между обкладками конденсатора обозначить , площадь обкладок S , толщину ленты л и ее диэлектрическую проницаемость л , то емкость C можно выразить как
![]() (16)
(16)
На рис. 2, г показан принцип устройства емкостных преобразователей с переменной площадью пластин, используемых для измерения угла поворота вала. Пластина 1 , жестко скрепленная с валом, перемещается относительно пластины 2 так, что длина зазора между ними сохраняется неизменной. Достоинством емкостных преобразователей с переменной площадью пластин является возможность соответствующим выбором формы подвижной 1 и неподвижной 2 пластин получить заданную функциональную зависимость между изменением емкости и входным угловым и линейным перемещением. Преобразователи с переменной площадью применяются для измерения перемещений, больших 1 мм.
Для измерения малых перемещений (10 -6 - 10-3 ) получили применение преобразователи с переменным зазором. Принцип устройства подобного дифференциального преобразователя изображен на рис. 2, д. Обкладка 2 закреплена на пружинах и перемещается поступательно под воздействием измеряемой силы F . Обкладки 1 и 3 неподвижны. Емкость между обкладками 2 и 3 увеличивается, а между обкладками 1 и 2 - уменьшается.
Огромным достоинством емкостного элемента является также принципиальное отсутствие шумов в отличие от резистивных и индуктивных элементов и отсутствие самонагрева. Все это приводит к тому, что в настоящее время в качестве наиболее высокочувствительных преобразователей в научных исследованиях используются емкостные преобразователи.
Емкостные преобразователи могут быть использованы при измерении различных неэлектрических величин по четырем направлениям: измеряемая неэлектрическая величина может быть функционально связана либо с , либо с S, либо с , либо с диэлектрическими потерями конденсатора. В последних двух случаях емкостные преобразователи можно применять для анализа состава вещества. При этом естественной входной величиной преобразователя будет состав вещества, заполняющего пространство между пластинами. Особенно широко емкостные преобразователи этого типа применяются при измерении влажности твердых и жидких тел.
В подавляющем же большинстве случаев практического использования емкостных преобразователей их естественной входной величиной является геометрическое перемещение электродов относительно друг друга.
Они используются в качестве уровнемеров, толщиномеров; для измерения влажности материалов; в качестве динамометров – приборов для измерения давлений сил; для измерения кручения вала; измерения вибраций, ускорений и т. д.
Электростатические преобразователи с изменяющейся емкостью используются в различных датчиках прямого преобразования, а также как преобразователи неравновесия в датчиках уравновешивания.
Область применения емкостных преобразователей весьма разнообразна, однако наиболее широко они используются для измерения малых перемещений и величин, легко преобразуемых в перемещение, например давлений.
При современной технологии изготовления датчиков начальный зазор может быть доведен до 5 – 10 мкм и порог чувствительности по перемещению оценивается значениями порядка 10-14 м. Все это приводит к тому, что в настоящее время в качестве наиболее высокочувствительных преобразователей в научных исследованиях используются емкостные преобразователи. Наблюдается также тенденция к применению емкостных преобразователей для всех измерений, проводимых в области сверхнизких температур.
Габаритные размеры емкостных преобразователей обычно определяются конструктивными соображениями. Однако следует всячески стремиться к увеличению емкости преобразователя, так как это уменьшает его выходное сопротивление и облегчит требования, предъявляемые к измерительной цепи и изоляции преобразователя.
Для увеличения емкости преобразователя зазор между пластинами уменьшают, насколько это возможно по технологическим и конструктивным соображениям. Он обычно составляет 100 - 500 мкм, а в некоторых преобразователях даже 10 – 20 мкм. При таких малых зазорах изменение их в процессе работы на 1 – 0,1 мкм уже может вызвать существенное изменение емкости, поэтому воздушный зазор должен быть тщательно защищен от влаги, пыли и паров, способных вызвать коррозию.
При проектировании емкостных преобразователей одним из важных вопросов является способ изоляции и крепления электродов. Лучшими свойствами обладают керамические изоляционные материалы, однако, их поверхностное сопротивление сильно зависит от загрязнения и влажности, поэтому при выборе крепления деталей преобразователя нужно предусмотреть минимальное влияние поверхностных сопротивлений изоляции на полное сопротивление утечки.
Для того чтобы в зависимости от температуры не изменялось расстояние между пластинами емкостного преобразователя, нужно подобрать материалы с соответствующими коэффициентами линейного расширения. Температурная погрешность нуля в значительной степени снижается при применении дифференциальных преобразователей.
Выходное сопротивление преобразователя при заданной емкости падает с ростом частоты, поэтому частоту напряжения питания не следует выбирать меньше 500 - 1000 Гц, а большинство измерительных цепей работает на частотах 105 – 107 Гц.
Емкости большинства преобразователей составляют 10 – 100 пФ, и поэтому даже при относительно высоких частотах напряжения питания (105
–107
Гц) их сопротивления велики и равны![]() Ом. Выходные мощности емкостных преобразователей малы, и в измерительных цепях необходимо применение усилителей. Допустимые значения напряжения питания емкостных преобразователей достаточно велики, и напряжения питания, как правило, ограничивается не возможностями преобразователя, а условиями реализации измерительной цепи.
Ом. Выходные мощности емкостных преобразователей малы, и в измерительных цепях необходимо применение усилителей. Допустимые значения напряжения питания емкостных преобразователей достаточно велики, и напряжения питания, как правило, ограничивается не возможностями преобразователя, а условиями реализации измерительной цепи.
Основной трудностью построения измерительных цепей с емкостными преобразователями является защита их от наводок. Для этих целей как сами преобразователи, так и все соединительные линии тщательно экранируется. Однако экранированный провод имеет емкость Сжэ между жилой и экраном ( С = 50 пФ/м), которая при неудачном выборе точки присоединения экрана может оказаться включенной параллельно емкости преобразователя. При этом падает чувствительность преобразователя, так как относительное изменение емкости уменьшается, и появляется весьма существенная по значению погрешность, вызываемая нестабильностью емкости Сжэ , поскольку любые изменения этой емкости воспринимаются как изменение рабочей емкости. Поэтому при построении измерительной цепи с емкостными преобразователями в первую очередь обращается внимание на включение так называемых паразитных емкостей.
Кроме того, следует обращать внимание на линейность зависимости выходного параметра измерительной цепи от измеряемой величины, имея в виду, что емкостные преобразователи являются преобразователями высокоомными, а измеряемая величина может быть связана линейной зависимостью как с сопротивлением преобразователя (при изменении зазора d ), так и с его проводимостью (при изменении площади S или диэлектрической проницаемостью e).
С емкостными датчиками применяются различные измерительные цепи – делители напряжения, мостовые схемы, резонансные контуры, схемы с кольцевым диодным детектором [1], причем последние обладают достаточной чувствительностью. Однако они имеют ряд ограничений, обусловленные взаимным шунтирующим влиянием диодов.
При заземлении одной из пластин (обычно общей подвижной пластины) желательно элементы измерительной цепи располагать в одном корпусе с датчиком, например так, как показано на рис 3, а.
 |
Тогда провода, идущие к вершинам а и б , могут быть без экранов, а емкость Сжэ провода, подходящего к вершине в , подключается параллельно источнику питания. В аналогичной цепи (рис. 3, б) использован недифференциальный усилитель, что стало возможным благодаря предварительному выпрямлению с разными знаками переменных напряжений, присутствующих на вершинах выходной диагонали моста.
Рис. 3. Измерительные цепи, расположенные
На рис. 4 представлена емкостно-диодная измерительная цепь дифференциального датчика с заземленной пластиной. Емкости датчика С1 и С2 подсоединены к источнику переменного напряжения с помощью четырех диодов и двух дополнительных конденсаторов С3 . В каждом полупериоде переменного напряжения открывается соответствующая пара диодов ( Д1, Д4 или Д2, Д3 ). При этом каждый из конденсаторов С3 соединяется последовательно то с емкостью С1 , то с емкостью С2 . При неравенстве емкостей С1 и С2 токи через конденсаторы С3 , текущие в положительном и отрицательном направлениях, будут не равны между собой. Вследствие этого на конденсаторах С3 появится постоянное напряжение, которое и является выходным. Если пренебречь падениями напряжения на диодах, то значение Uвых определится приближенным соотношением
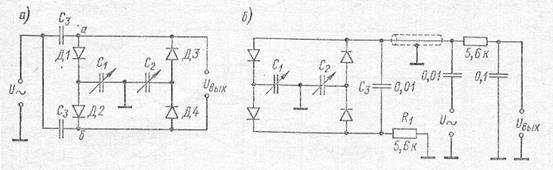 |
Рис. 4. Емкостно-диодная измерительная цепь
Нестабильность выходного напряжения определяется неидентичностью падения напряжения на диодах, поэтому диоды должны тщательно подбираться. Чтобы избежать шунтирования емкостей датчика паразитными емкостями, диодная сборка помещается в корпусе датчика. Неравенство паразитных емкостей проводов, подходящих к точкам а и б , приводит к изменению переменной составляющей напряжения на выходе; на постоянную составляющую напряжения эти емкости не влияют.
 |
Возможный вариант цепи (рис.5, а), предназначенный для телеизмерений, показан на рис.5, б. Здесь по одному коаксиальному кабелю передается переменное напряжение U от источника на датчик и постоянное напряжение Uвых – с датчика. Внутри датчика монтируются четыре диода, конденсатор С3 и резистор R1 . Показанные на схеме (рис.5, б) значения параметров элементов рассчитаны на частоту питающего напряжения, примерно равную 1 МГц.
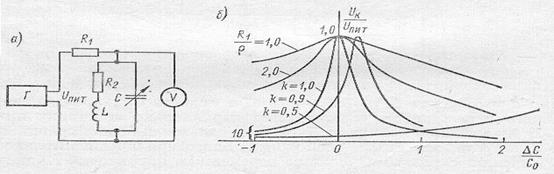
Рис. 6. Измерительные цепи с резонансными контурами
На рис.6 приведены измерительные цепи с резонансными контурами. Цепи питаются от источников со стабильной частотой w0
. При изменении емкости С
преобразователя (рис.6, а) сопротивление контура изменяется по резонансной кривой (рис.6, б) и при ![]() достигает максимума.
достигает максимума.
На склонах резонансной кривой может быть выбран участок, более или менее приближающийся к линейному. Пренебрегая сопротивлением R2 по сравнению с сопротивлениями wL и R1 и полагая
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,
напряжение на контуре можно выразить соотношением
![]()
Зависимости Uк / Uпит представлены на рис. 6, б.
Допустимое напряжение на конденсаторе определяется значением напряженности, при которой наступает пробой воздушного промежутка. Для воздуха при нормальном давлении и зазорах между пластинами 0,1 – 10 мм эта напряженность составляет 2 – 3 кВ/мм. При зазорах, меньших 0,1 мм, можно не снижать напряжения, так как при напряжениях, меньших 350 В, воздушный промежуток вообще не пробивается независимо от длины зазора.
Для большинства диэлектриков пробивная напряженность при электрическом пробое при нормальной температуре составляет 100 – 500 кВ/мм. Однако допустимое напряжение конденсаторов с диэлектриком определяется не только электрическим, но и тепловым пробоем, напряженность при котором зависит от геометрических, тепловых и электрических параметров преобразователя и уменьшается с увеличением частоты обратно пропорционально ![]() .
.
В ряде случаев напряжение питания ограничивается допустимыми силами электростатического притяжения между пластинами. В одинарном преобразователе при диаметре пластины d =25 мм, зазоре d = 0,1 мм и напряжении U = 50 В значение электростатической силы достигает f эс = U 2 e S /( 2 d 2 ) = 6*10-4 H .
В дифференциальном преобразователе с переменном зазором (см. рис. 2, д), силы, действующие между парами пластин, направлены встречно и компенсируют друг друга. Однако полная компенсация возможна только, если входное сопротивление цепи, включенной в диагональ моста, бесконечно велико и рабочие емкости ничем не шунтируются. В этом случае уменьшение или увеличение зазора напряжения между соответствующими пластинами; сила, действующая между ними, остается неизменной, т. е. разность сил равна нулю независимо от перемещения средней пластины.
Для расширения диапазона измерения и возможного размещения измеряемых емкостей на значительном расстоянии друг от друга в схему с кольцевым диодным детектором целесообразно добавить еще один накопительный конденсатор и резистор в цепи разряда измеряемой емкости [2]. В данной курсовой работе исследуется такая емкостно – диодная измерительная схема показанная на рис. 7.
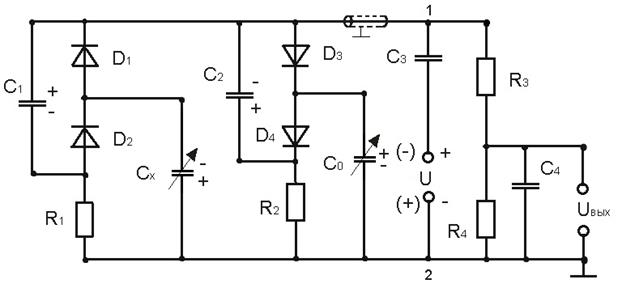
Рис. 7. Емкостно-диодная измерительная схема
Подготовка к эксперименту
Подготовка алгоритмов решения задач измерений
Для исследования емкостно-диодной измерительной схемы для начала надо определить к каким конечным целям это исследование можно отнести. В зависимости от конечных целей измерение, можно разделить:
1) научные;
2) технические
Научные измерения являются составной частью научных экспериментов. Они необходимы для установления качественных и количественных соотношений для ранее неизвестных ситуаций, для сопоставления и построения новых гипотез и теорий. Задача измерения в этом случае формулируется неполно. К научным следует отнести и такие измерения, проводимые в лабораториях и на производстве, когда известны и объем измерения, и измеряемая величина, и измерительная система, но неизвестны условия проведения измерений.
При технических измерениях задача формулируется полно и однозначно, возможность ее решения гарантируется.
Решение задачи научного измерения - это поисковая проблема. Напротив, решение задач технических измерений - это часто повторяющиеся процедуры, и соответственно этому должны быть организованы процессы измерений в производственных условиях.
Из этого следует, что исследование емкостно-диодной измерительной схемы следует отнести к техническим измерениям.
Строгость принципов построения алгоритмов ограничивает их применение для процессов решения задач в измерительной технике. Однако возможна разработка алгоритмических программ измерений, которые, сохраняя некоторые важные черты алгоритмов (определенность, конечность, массовость, результативность), отвечали бы менее строгим требованиям к ним. Для этого имеются следующие предпосылки:
1). Операции, выполняемые при решении задач измерений, подчиняются определенным закономерностям.
2). Последовательность операций при решении задачи измерения определяется не видом измеряемой величины и не объектом измерения, а общей характеристикой задачи, соответствующей конечной цели измерения.
3). Множество задач, возникающих при такой классификации, является конечным.
4). Комплексная задача разбивается на ряд частных, которые можно формализовать и решать последовательно с учетом их взаимовлияния.
5). При решении задач измерений накапливается опыт.
6). Можно составлять программы измерений для определенного круга пользователей.
Программа измерения представляет собой конечное число соподчиненных действий и актов принятия решений и имеет определенную область применения для определенного круга специалистов. Она полностью описывает процесс решения задачи измерения.
Методы уменьшения погрешностей измерений
Способы обнаружения и устранения систематических погрешностей зависят от вида измеряемой физической величины, используемых методов и средств измерений.
К основным методам уменьшения погрешностей относятся:
1). Метод инвертирования;
2). Метод замещения;
3). Метод вспомогательных измерений;
4). Метод симметричных наблюдений.
Выявление и устранение причин возникновения погрешностей
Наиболее распространенный способ уменьшения всех видов систематических погрешностей. Примерами таких способов являются:
- термостатирование отдельных узлов или прибора в целом, а также проведение измерений в термостатированных помещениях для исключения температурной погрешности;
- применение экранов, фильтров и специальных цепей (например, эквипотенциальных цепей) для устранения погрешностей от влияния электромагнитных полей, наводок и токов утечек;
- применение стабилизированных источников питания;
- амортизация приборов;
- удаление средств измерений и объектов исследования от источников влияющих воздействий;
- исключение из измерительной цепи материалов, создающих большую термо-ЭДС в паре с медью, например никеля, который в паре с медью создает термо-ЭДС 19 мкВ/К.
При аттестации высокоточных мер магнитной индукции производят компенсацию магнитного поля Земли трехкомпонентной системой катушек с током. Погрешность от термо-ЭДС можно исключить путем включения в цепь термопары, которая компенсирует паразитную термо-ЭДС.
Для уменьшения прогрессирующей погрешности от старения элементов (резисторы, растяжки, постоянные магниты и др.) их параметры стабилизируют путем искусственного и естественного старения.
Систематические погрешности можно также уменьшить рациональным расположением средств измерений по отношению друг к другу, к источнику влияющих воздействий и к объекту исследования. Например, магнитоэлектрические приборы должны быть удалены друг от друга, оси катушек индуктивностей должны располагаться под углом 90o , выводы термопары располагаются по изотермическим линиям объекта.
Многие систематические погрешности, являющиеся не изменяющимися во времени функциями влияющих величин или обусловленные стабильными физическими эффектами, могут быть теоретически рассчитаны и устранены введением поправок или использованием специальных корректирующих цепей. Расчетным путем можно также определить ряд погрешностей взаимодействия, например погрешность от собственного потребления мощности средством измерения.
Радикальным способом устранения систематических погрешностей является поверка средств измерений в рабочих условиях с целью определения поправок к результатам измерений. Это дает возможность учесть все систематические погрешности без выявления причин их возникновения.
Степень коррекции систематических погрешностей в этом случае зависит от метрологических характеристик используемых образцовых приборов и случайных погрешностей поверяемых приборов.
Метод инвертирования
Используется для устранения ряда постоянных и медленно изменяющихся систематических погрешностей. Этот метод известен также под названиями:
- метода исключения погрешности по знаку;
- метода коммутационного инвертирования;
- метода структурной модуляции;
- метода двукратных измерений;
-метода инвертирования функций преобразования и др.
Все эти методы основаны на выделении алгебраической суммы четного числа сигналов измерительной информации, которые вследствие инвертирования отличаются направлением информативного сигнала, опорного сигнала или знаком погрешности.
Близок к методу инвертирования метод модуляции-демодуляции, при котором, по существу, производятся периодическое инвертирование входного сигнала и подавление помехи, имеющей однонаправленное действие.
Распространенным вариантом метода инвертирования является метод исключения погрешности по знаку. Он часто применяется для исключения известных по природе погрешностей, источники которых имеют направленное действие. При использовании этого метода два измерения выполняются так, чтобы постоянная систематическая погрешность входила в результаты измерений с разными знаками. Этого можно достигнуть изменением знака погрешности при неизменном значении измеряемой величины или инвертированием входного сигнала при сохранении знака и значения систематической погрешности.
Первый способ используется в том случае, если можно изменить знак или направление систематической погрешности. Например, для исключения влияния внешнего магнитного поля на показания прибора или на параметры меры изменяют знак погрешности путем поворота прибора на 1800 . Этот же способ используется в астазированных средствах измерений, содержащих два идентичных преобразователя, оси направленности которых расположены под углом 180o. Полностью устранить рассматриваемую погрешность можно только в том случае, если внешнее поле однородно и вектор магнитной индукции направлен коллинеарно с осью направленности прибора. Не исключенные систематические погрешности от неточного выполнения этих условий в ряде случаев можно теоретически оценить.
Способ инвертирования входного сигнала широко используется для коррекции аддитивных погрешностей, не зависящих от направления измеряемой величины (например, погрешности нуля в приборах с нулем посредине шкалы, погрешностей от термо-ЭДС, внешнего магнитного поля и других), а также некоторых мультипликативных погрешностей средств измерений (например, погрешности линейности, обусловленной значениями четных производных функции преобразования).
Методы инвертирования широко используются для уменьшения погрешностей современных средств измерений. Этому способствует развитие измерительных преобразователей с дифференциальными входами, а также быстродействующих коммутаторов и сумматоров в микроэлектронном исполнении.
Метод замещения (метод разновременного сравнения)
Является наиболее универсальным, дает возможность устранить большинство систематических погрешностей. Измерения осуществляются в два приема.
Сначала по отсчетному устройству прибора делают отсчет измеряемой величины, а затем, сохраняя все условия эксперимента неизменными, вместо измеряемой величины на вход прибора подают известную величину, значение которой с помощью регулируемой меры (калибратора) устанавливают таким образом, чтобы показание прибора было таким же, как при включении измеряемой величины. За результат измерения принимается значение известной величины, определяемое по входному коду меры.
Метод замещения широко используется для повышения точности измерений ряда величин, например, для определения массы с помощью не очень точных весов и набора гирь, для точных измерений сопротивлений, индуктивностей, емкостей и других величин, для которых существуют точные регулируемые меры. Метод обеспечивает в ряде случаев существенное повышение точности, поскольку точность мер обычно выше точности других средств измерений. Разновидностью метода замещения является метод разновременного компарирования, который используется при измерениях таких величин, которые нельзя с высокой точностью воспроизводить при помощи регулируемых мер или других технических средств.
Обычно это величины, изменяющиеся с высокой частотой или по сложному закону. В качестве известных регулируемых величин при этом используются величины такого же рода, как измеряемые, но отличающиеся от них спектральным составом (обычно постоянные во времени и в пространстве) и создающие такой же, как и измеряемая величина, сигнал на выходе компарирующего преобразователя.
Другой разновидностью метода замещения является метод образцовых сигналов, заключающийся в том, что на вход средства измерения периодически вместо измеряемой величины подаются образцовые сигналы такого же рода, что и измеряемая величина.
Разность между реальной и номинальной градуировочными характеристиками используется для коррекции чувствительности или для автоматического введения поправки в результат измерения. При этом, как и в методе замещения, устраняются все систематические погрешности, но только в тех точках диапазона измерения, которые соответствуют образцовым сигналам.
Метод широко используется в современных точных цифровых приборах и в информационно-измерительных системах. Характерным примером метода образцовых сигналов является периодическая подстройка рабочего тока в компенсаторах и цифровых вольтметрах постоянного тока при помощи нормального элемента.
К методу образцовых сигналов примыкает тестовый метод. Здесь значение измеряемой величины определяется по результатам нескольких наблюдений, при которых в одном случае входным сигналом средства измерения является сама измеряемая величина Х, а в другом - так называемые тесты, являющиеся функциями измеряемой величины, например
X1 = X + X;
X2 = a · X;
X3 = (X + X)/b.
Здесь X - известное приращение величины, создаваемое мерой; a, b - постоянные коэффициенты.
Тестовые методы можно использовать для коррекции систематических погрешностей при измерениях различных физических величин. Эффективность этих методов зависит от погрешности воспроизведения величины X и наличия случайных погрешностей.
Метод вспомогательных измерений
Используется для исключения погрешностей от влияющих величин и неинформативных параметров входного сигнала. Для реализации этого метода одновременно с измеряемой величиной Х при помощи вспомогательных измерительных устройств производится измерение каждой из влияющих величин и вычисление при помощи вычислительного устройства, а также формул и алгоритмов влияния поправок Xi к результатам измерений. Широкому использованию метода вспомогательных измерений способствует быстрое развитие средств измерений со встроенными микропроцессорами. Объектами вспомогательных измерений являются не только влияющие величины, но и неинформативные параметры входного сигнала.
Этот метод является составной частью многих структурных методов коррекции погрешностей.
Метод симметричных наблюдений
Заключается в проведении многократных наблюдений через равные промежутки времени и усреднении результатов наблюдений, симметрично расположенных относительно среднего наблюдения. Обычно этот метод применяется для исключения прогрессирующих погрешностей, изменяющихся по линейному закону.
Метод симметричных наблюдений можно использовать для устранения других видов погрешностей, например систематических погрешностей от влияющих величин, изменяющихся по периодическому закону. В этом случае симметричные (периодические) наблюдения проводят через половину периода, когда погрешность имеет разные знаки, но одинаковые значения. Таким путем можно, например, исключить погрешность от наличия четных гармоник при измерении амплитудного значения напряжения и искаженной форме кривой.
Все рассмотренные методы направлены на выявление и уменьшение погрешностей измерений. Эта цель достигается за счет усложнения эксперимента, применения более сложных и дорогостоящих средств измерений, например, микропроцессорных приборов или измерительно–вычислительных комплексов.
Построение технологической карты для обобщенной программы подготовки к проведению измерений.
Технологическая карта для обобщенной программы подготовки к проведению измерений
| № п/п |
Содержание |
P 01 Старт
P 02 Задача измерения
P 03 Понятна ли формулировка задачи измерения?
P 04 Заново сформулировать задачу измерения
P 05 Можно ли получить искомую информацию только из результатов
измерений?
P 06 Является ли измерение более экономичным, чем поиск результата в
литературных источниках?
P 07 Заменить измерение изучением литературных источников
P 08 Известен ли носитель информации?
P 09 Решение задачи
P 10 Стоп
P 11 Направленный опрос источников информации
P 12 Коллеги по учебе, по специальности
P 13 Библиотека университетов
P 14 Систематические каталоги:
1) библиотек вузов;
2) городской технической библиотеки
P 15 Годовые подшивки технических журналов за последние 5 лет
P 16 Реферативные источники:
1) реферативные журналы России; 2) Engineering Index USA
P 17 Известен ли источник информации?
P 18 Оптимизирован ли источник измерительной информации?
P 19 Предпочтителен легко получаемый источник измерительной информации
P 20 Известны ли точностные требования?
P 21 Обоснованы ли точностные требования?
P 22 Заменить необоснованные точностные требования на обоснованные
P 23 Известно ли, какие точностные требования технически реализуемы?
P 24 Имеется ли возможность технической реализации точностных
требований, изложенных в задаче измерения?
P 25 Можно ли заново сформулировать задачу?
P 26 Стоп
P 27 Известны ли принцип и метод измерения?
P 28 Оптимизированы ли принцип и метод измерения?
P 29 Предпочтительны классические методы прямых измерений
P 30 Известен ли процесс измерения?
P 31 Оптимизирован ли процесс измерения?
P 32 Предпочтительны статические методы измерений
P 33 Известна ли система измерения?
P 34 Оптимизирована ли система измерения?
P 35 Предпочтительна измерительная система, более простая по структуре и
конструктивному выполнению
P 36 Существует ли необходимая измерительная система?
P 37 Подготовить измерительную систему к проведению измерений
P 38 Часто ли повторяются данные измерения?
P 39 Купить измерительную систему
P 40 Существуют ли в прокате данные измерительные системы?
P 41 Взять в прокат измерительную систему
P 42 Целенаправленный обзор источников информации
P 43 Справочные каталоги научных приборов:
1) Академии наук России; 2) вузов России;
3) промышленных предприятий России
P 44 Стоп
Проведение измерений
На рис. 7. представлена емкостно-диодная измерительная цепь дифференциального. Емкости датчика С1 и С2 подсоединены к источнику переменного напряжения с помощью четырех диодов D1 , D2 , D3 , D4 и двух дополнительных конденсаторов С3 , С4 . В каждом полупериоде переменного напряжения открывается соответствующая пара диодов (D1 , D2 или D3 , D4 ). При этом каждый из конденсаторов С3 , С4 соединяется последовательно то с емкостью С1 , то с емкостью С2 . При неравенстве емкостей С1 и С2 токи через конденсаторы С3 , текущие в положительном и отрицательном направлениях, будут не равны между собой. Вследствие этого на конденсаторах С3 появится постоянное напряжение, которое и является выходным. Если пренебречь падениями напряжения на диодах, то значение Uвых определится приближенным соотношением
![]()
Нестабильность выходного напряжения определяется не идентичностью падения напряжения на диодах, поэтому диоды должны тщательно подбираться. Чтобы избежать шунтирования емкостей датчика паразитными емкостями, диодная сборка помещается в корпусе датчика. Неравенство паразитных емкостей проводов, подходящих к точкам 1 и 2, приводит к изменению переменной составляющей напряжения на выходе; на постоянную составляющую напряжения эти емкости не влияют.
Источник переменного тока напряжением U подсоединен к точкам 1 и 2 измерительной схемы через разделительный конденсатор С3 , конденсатор Сх, емкость которого измеряется, подключен к точкам 1 и 2 через диод D1 . Накопительный конденсатор C1 подсоединен к точкам 1 и 2 через резистор R1 , а к конденсатору Сх — через диод D2 . Образцовый конденсатор Со, емкость которого известна, подключен к точкам 1 и 2 через диод D3 . Второй накопительный конденсатор С2 подсоединен к точкам 1 и 2 через резистор R2, а к конденсатору Со - через диод D4 . К точкам 1 и 2 подсоединен также фильтр нижних частот, состоящий из последовательно соединенных резистора R3 и конденсатора С4 . Параллельно конденсатору С4 включено сопротивление нагрузки R4 , с которого и снимается выходной сигнал Uвых . При положительной полярности напряжения U (указанной на рис. 1 без скобок) открывается диод D3 и конденсатор Со заряжается до напряжения Uc0 которое определяется значением Со. Напряжение Uс на конденсаторе С вычисляется по формуле
Uc (t) = Uc() - [Uc() – Uc(0)e- t / RC , (4.1)
здесь t - время; Uc(0), Uc() - значения Uc при t = 0иt = ;R - сопротивление цепи заряда (прямое сопротивление диода D1 или D3 ).
При изменении направления U (полярность указана на рис. 1 в скобках) будет протекать ток заряда конденсатора C2 по цепи: точка 2, конденсатор Со, диод D4 , конденсатор С2 , точка 1. При этом конденсатор С2 зарядится до напряжения Uc2 = U + Uc0 , так как источник напряжения U и конденсатор С0 оказались включенными последовательно и согласно. Аналогичным образом напряжение на конденсаторе С1 равно Uc1 = U + Ucx (где Ucx определяется значением Сx), но полярность Uc1 противоположна полярности Uc2 . Конденсатор C1 разряжается по цепи R3 , R4 , R1 , а конденсатор С2 - по цепи R2 , R4 , R3 . Таким образом, токи разряда конденсаторов С1 и С2 протекают через сопротивление нагрузки R4 встречно и выходной сигнал Uвых будет пропорционален разности напряжений Uc1 и Uc2 , т. е. в конечном счете пропорционален разности емкостей конденсаторов Сх и С0 .
В схеме сохраняется шунтирующее действие пар диодов D1 , D2 и D3 , D4 , но так как сопротивления R1 , R2 намного больше прямого сопротивления диодов, причем для шунтирующих токов резисторы R1 , R2 оказываются включенными последовательно, то это действие намного меньше, чем в емкостно-диодной схеме [7]. Нестабильность выходного напряжения определяется не идентичностью падения напряжения на диодах, поэтому диоды должны тщательно подбираться. Чтобы избежать шунтирования емкостей датчика паразитными емкостями, диодная сборка помещается в корпусе датчика.
Построение технологической карты для обобщенной программы проведения измерений.
Технологическая карта для обобщенной программы проведения измерений
| № п/п |
Содержание |
I 01 Старт
I 02 Экспериментальная часть измерений
I 03 Овладел ли экспериментатор процессом измерения?
I 04 Опрос источников информации
I 05 Специалист
I 06 Специальная литература
I 07 Находится ли объект измерения в однозначных (воспроизводимых)
условиях эксплуатации?
I 08 Добиться однозначных условий эксплуатации объекта измерения
I 09 Находится ли объект измерения в случайных (неконтролируемых)
условиях?
I 10 Нормализовать условия эксплуатации
I 11 Готова ли измерительная система к эксплуатации?
I 12 Привести измерительную систему в состояние готовности
I 13 Известны ли условия согласования системы измерения и объекта
измерения?
I 14 Определить условия согласования
I 15 Оптимизированы ли условия согласования?
I 16 Условие: При изменении направления U (полярность указана на рис. 1 в
скобках)
I 17 Нужно ли определить состояние объекта измерения?
I 18 Определить состояние объекта измерения
I 19 Проведение серии статических измерений в неизменных условиях
наблюдений
I 20 Получение ряда измерений и указание условий проведения измерений
I 21 Нужно ли определять форму?
I 22 Достаточно определить статическую характеристику датчика
I 23 Определить амплитудно-частотные характеристики
I 24 Достаточно определение оптимальных значений
I 25 Проведение серии динамических измерений в неизменных условиях
наблюдений
I 26 Стоп
Обработка результатов измерений
Построение технологической карты для обобщенной программы обработки результатов измерений.
| №, п/п. |
Содержание |
O 01 Старт
O 02 Анализ и коррекция погрешностей ряда измерений I 20
O 03 Возникают ли в процессе измерения систематические и случайные
погрешности?
O 04 Проверить правильность интерпретации процесса измерения
O 05 Были ли найдены погрешности измерений?
O 06 Определить погрешности измерений
O 07 Определены ли раздельно систематические и случайные погрешности?
O 08 Определить раздельно систематические и случайные погрешности
O 09 Были ли графически определены случайные погрешности?
O 10 Предпочесть графический способ определения случайных
погрешностей
O 11 Были ли исключены грубые погрешности?
O 12 С помощью соответствующих критериев исключить грубые по-
грешности
O 13 Достаточно ли точно вычислены систематические погрешности?
O 14 Достаточно ли точно проведено экспериментальное определение
систематических погрешностей?
O 15 Улучшить аппроксимацию объекта моделью
O 16 Применить подходящие образцовые меры (правильно: систематическая
погрешность образцовой меры должна быть на порядок меньше
систематической погрешности исследуемого процесса измерения)
O 17 Можно ли пренебречь систематическими погрешностями по сравнению
со случайными?
O 18 Провести коррекцию систематических погрешностей
O 19 Уменьшить влияние случайных погрешностей
O 20 Можно ли повторить процесс измерения?
O 21 Предпочесть коррекцию с помощью вычислений
O 22 Процесс измерения часто повторяется
O 23 Можно ли изменить структуру измерительной системы?
O 24 Предпочесть коррекцию путем изменения параметров системы
O 25 Предпочесть коррекцию с помощью корректирующих звеньев
O 26 Сформулировать результат измерения
O 27 Результат измерения
O 28 Стоп
Для исследования и изучения емкостно-диодной схемы мною были проведены следующие опыты и были получены следующие результаты.
1). построить статическую характеристику датчика (зависимость выходного напряжения UBblx от измеряемой емкости С при заданных значениях сопротивлений R1 , R2 и емкости конденсатора Со) на частоте 50 кГц;
2). определить амплитудно-частотные характеристики измерительной схемы при разных значениях Сх и R1 = R2 = R;
3). оценить статические характеристики измерительной схемы при R1 R2 ;
4). построить статические характеристики измерительной схемы UBb
,x
= f(C),
амплитудно-частотные и регулировочные характеристики. Сделать выводы по результатам исследований.
Оформление результатов измерений
1) Снял статическую характеристику датчика, построил статическую характеристику датчика (зависимость выходного напряжения UBblx от измеряемой емкости С при заданных значениях сопротивлений R1 , R2 и емкости конденсатора Со) на частоте 50 кГц; Снятые показания представлены в таблицах 1 и 2.
Таблица 1
С0 положение 1, С0 = 42,57 пФ. R1 =5,698 кОм, R2 =5,701 кОм
| Uвы x ,В |
-0,8348 |
0,0032 |
0,7245 |
0,8928 |
0,9792 |
1,0488 |
1,1072 |
1,2149 |
1,3144 |
|
| С,пФ |
25 |
62 |
80 |
100 |
120 |
140 |
160 |
200 |
240 |
|
| 1,3967 |
1,4751 |
1,5305 |
1,6187 |
1,7001 |
||||||
| 280 |
320 |
350 |
400 |
450 |
||||||
Таблица 2
С0 положение 1, С0 = 42,57 пФ. R1 =55,19 кОм, R2 =55,19 кОм
| UBblx |
-1,4533 |
0,1069 |
1,0054 |
1,5477 |
1,8366 |
2,0448 |
2,2054 |
2,4663 |
2,6783 |
|
| С,пФ |
25 |
62 |
80 |
100 |
120 |
140 |
160 |
200 |
240 |
|
| 2,8477 |
2,9446 |
3,0963 |
3,2465 |
3,3670 |
||||||
| 280 |
320 |
350 |
400 |
450 |
||||||
На рис. 8 представлена статическая характеристика исследуемой схемы.
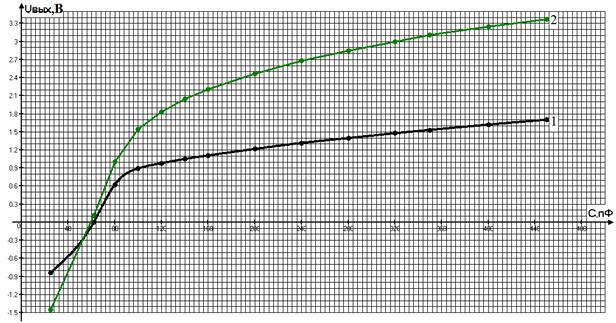
Рис. 8. Статическая характеристика.
1. -при С0 = 42,57 пФ. R1 =5,698 кОм, R2 =5,701 кОм
2. – при С0 = 42,57 пФ. R1 =55,19 кОм, R2 =55,19 кОм
Вывод: Лучше всего для работы с датчиком использовать кривую 2 чем 1 потому что она имеет больший отрезок линейности, это объясняется большим эффектом шунтирования.
2)определил амплитудно-частотные характеристики измерительной схемы при разных значениях Сх и R1 = R2 = R; на рис. 9 и таблицах 3 и 4 показаны эти характеристики
Таблица 3
Амплитудно-частотная характеристика при R1 =R2 =85,32 кОм
| 1) F, 2) кГц |
Uвых , В, Сх: |
|||||||
| 100 пФ |
150 пФ |
200 пФ |
250 пФ |
300 пФ |
350 пФ |
400 пФ |
450 пФ |
|
| 20 |
1,2452 |
1,7045 |
2,0073 |
2,2567 |
2,4486 |
2,6139 |
2,7532 |
2,8731 |
| 30 |
1,4086 |
1,9790 |
2,3080 |
2,5670 |
2,7631 |
2,9276 |
3,0695 |
3,1910 |
| 40 |
1,4761 |
2,0810 |
2,4224 |
2,6775 |
2,8770 |
3,0735 |
3,2305 |
3,3541 |
| 50 |
1,4963 |
2,1101 |
2,4500 |
2,7183 |
2,9406 |
3,1250 |
3,2767 |
3,3998 |
| 60 |
1,4845 |
2,1146 |
2,4588 |
2,7373 |
2,9630 |
3,1424 |
3,2845 |
3,3981 |
| 70 |
1,4639 |
2,1091 |
2,4573 |
2,7380 |
2,9556 |
3,1255 |
3,2622 |
3,3730 |
| 80 |
1,4410 |
2,0725 |
2,4430 |
2,7330 |
2,9358 |
3,0974 |
3,2247 |
3,3276 |
| 100 |
1,3786 |
1,9374 |
2,3343 |
2,6482 |
2,8554 |
3,0091 |
3,1263 |
3,2186 |
| 200 |
1,1070 |
1,4951 |
1,7409 |
1,9411 |
2,0689 |
2,1621 |
2,2320 |
2,2858 |
Таблица 4
Амплитудно-частотная характеристика при R1 =R2 =55,19 кОм
| 3) F, 4) кГц |
Uвых , В, Сх: |
|||||||
| 100 пФ |
150 пФ |
200 пФ |
250 пФ |
300 пФ |
350 пФ |
400 пФ |
450 пФ |
|
| 8 |
1,1177 |
1,4893 |
1,7539 |
1,9807 |
2,1486 |
2,3239 |
2,4532 |
2,5731 |
| 10 |
1,3478 |
1,7890 |
2,0080 |
2,3670 |
2,5631 |
2,7276 |
2,8695 |
2,9610 |
| 12 |
1,4918 |
2,0810 |
2,4224 |
2,5775 |
2,7770 |
2,9735 |
3,0305 |
3,2541 |
| 15 |
1,4963 |
2,1141 |
2,4500 |
2,7183 |
2,9406 |
3,1250 |
3,2767 |
3,3698 |
| 20 |
1,5585 |
2,1106 |
2,4588 |
2,6373 |
2,9630 |
3,1124 |
3,2845 |
3,3981 |
| 30 |
1,4639 |
2,1091 |
2,3573 |
2,4380 |
2,8556 |
2,9055 |
3,1622 |
3,2730 |
| 40 |
1,4410 |
1,8125 |
2,2430 |
2,3630 |
2,6358 |
2,7974 |
2,8247 |
2,9276 |
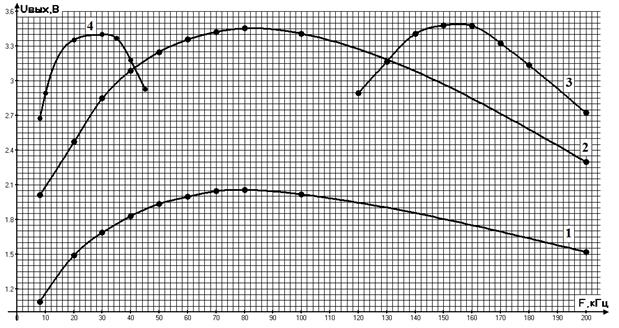
Рис. 9. Обобщенные амплитудно-частотные характеристики исследованной схемы
Определялись амплитудно-частотные характеристики измерительной схемы при разных значениях Сх и R1 = R2 = R. Были обнаружены «резонансные» свойства (для постоянных значений Сх и R1 = R2 = R выходной сигнал Uвых достигает максимума при определенной частоте F следования двуполярных импульсов питания).
Обобщенные амплитудно-частотные характеристики схемы при различных Сх и R приведены на рис. 3. Кривая 1 получена при значении измеряемой емкости Сх1 , кривые 2,3,4 – при Сх2 причем Сх1 Сх2 и разных сопротивлениях. Из всего следует что, измерительная схема может быть настроена на оптимальное значение частоты Fопт , когда выходной сигнал максимален при различных Сх (кривые 1,2) и слабо зависит от частоты импульсов питания (конечно в некоторых пределах). Этот эффект обнаруживается только при определенной величине R1 и R2 .
При увеличении сопротивления оптимальное значение частоты смещается влево (кривая 4), а максимальное значение выходного напряжения уменьшается. При уменьшении сопротивлений наблюдается обратная зависимость (кривая 3). Таким образом, схема, настроенная на оптимальную частоту при одном значении Сх (кривая 1), не будет оптимальной для других значений Сх (кривые 3,4).
3) Определение оптимальных значений F и R, для исследуемой схемы.
Чтобы определить оптимальные значения F и R , при двух значениях Сх (Сх2 =2С0 и Сх1 несколько большей С0 ) были сняты экспериментальные зависимости частоты максимума (FUmax ) от сопротивления R (таблицы 5 и 6 и рис. 4), где кривая 1 получена для Сх1 С0 а кривая 2 – для Сх2 = 2С0
Таблица 5
R1 =15,45 кОм, R2 =5,700 кОм, F=50 кГц.
| UBblx |
-1,0278 |
-0,0449 |
0,6891 |
0,8710 |
1,0230 |
1,0755 |
1,1706 |
1,2552 |
1,3251 |
|
| С,пФ |
25 |
62 |
80 |
100 |
120 |
140 |
160 |
200 |
240 |
|
| 1,3883 |
1,4330 |
1,5014 |
1,5650 |
1,6678 |
||||||
| 280 |
320 |
350 |
400 |
450 |
||||||
Таблица 6
R1 =15,45 кОм, R2 =105,4 кОм, F=50 кГц.
| UBblx |
-0,8780 |
0,7525 |
1,7307 |
2,4650 |
2,8930 |
3,2767 |
3,5045 |
3,9612 |
4,3432 |
|
| С,пФ |
25 |
62 |
80 |
100 |
120 |
140 |
160 |
200 |
240 |
|
| 4,6350 |
4,8851 |
5,0500 |
5,2963 |
5,4970 |
||||||
| 280 |
320 |
350 |
400 |
450 |
||||||
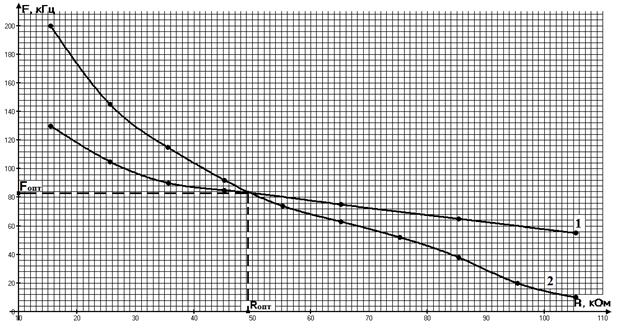
Рис. 5. Обобщенные регулировочные характеристики схемы
Кривые 1 и 2 пересекаются в точке, соответствующей оптимальным значениям частоты Fопт и сопротивления Rопт . При этом выполняется условие Т/=3,5, где = Rопт . Сх2 ; Т=1/ Fопт . Все подобные характеристики для Сх1 Сх Сх2 находятся между кривыми 1 и 2 и пересекаются в той же точке. Так из рис. 6 видно что , в исследованной схеме оптимальное значение сопротивления – 48кОм, при этом частота источника питания составила 80кГц.,а максимальный выходной сигнал составил 1,3В.
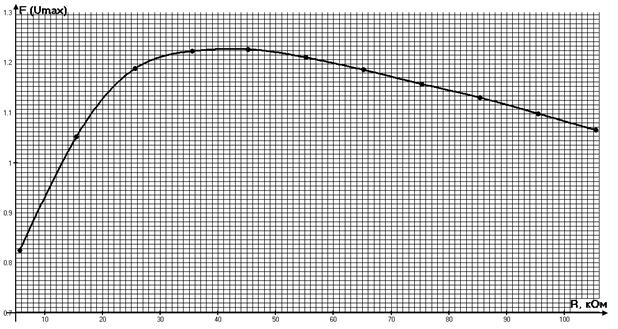
Рис. 6. Обобщенная характеристика схемы после настройки
Заключение
Данная схема позволяет смещать характеристику в область положительных или отрицательных значений выходного напряжения путем выбора разных значений R1 и R2 (при R1 R2 ), т.е настраивать устройство только изменением сопротивления одного из резисторов. Благодаря такому включению резисторов R1 и R2 , а также наличию двух накопительных конденсаторов (С1 и С2 ), появляется возможность территориально разнести конденсаторы Сх и С0 на значительные расстояния.
В ходе проделанного исследования сделанные выводы можно применять для рассмотрения датчиков расхода топлива, датчиков перемещения. Данная схема наглядно показывает все существующие недостатки методов определения расхода топлива не емкостным методом.
Список литературы
1. Левшина Е. С. Электрические измерения физических величин./ Е. С. Левшина, П. В. Новицкий. – Л.: Энергоатомиздат, 1983. – 320 с.
2. Шивринский В.Н. Измерительная схема емкостно- диодного датчика // Датчики и системы. – 2005.- № 11.
3. Магден И.Н. Преобразователи неэлектрических величин./ И.Н. Магден, В.Н. Рыбин. - М.: Знание, 1980.- 64 с.
4. Демидова – Панферова Р.М. Электрические измерения./ Р.М. Демидова – Панферова, В.Н. Малиновский, В.С. Попов. – М.: Энергоиздат, 1982. – 392 с.