Исследование магнитных систем в программной системе конечно-элементного анализа ANSYS
СОДЕРЖАНИЕ: Основные положения метода конечных элементов для решения электромагнитных задач. Общая характеристика, назначение и сравнение основных функциональных возможностей двух устройств с постоянными магнитами NdFeB: магнитной пружины и магнитного держателя.Санкт-Петербургский государственный политехнический университет
Физико-механический факультет
Кафедра механики и процессов управления
Проект допущен к защите
Зав. Кафедрой
________________В. А. Пальмов
“____”_________________2008 г.
ДИПЛОМНЫЙ ПРОЕКТ
Тема: Исследование магнитных систем в программной системе конечно-элементного анализа ANSYS.
Направление: 150300 – Прикладная механика
Специальность: 150301 – Динамика и прочность машин
Выполнила студентка гр. 6055/2 Н. А. Крылова
Руководитель, к.т.н., доцент Л. В. Штукин
Консультант по вопросам
охраны труда к.т.н., доцент В.В. Монашков
Санкт-Петербург
2008
Реферат
с. 64 рис. 37, табл. 17.
Исследование магнитных систем в программной системе конечно-элементного анализа ANSYS
Определена сила магнитного поля на ферромагнитное основание экспериментально и методами программной системы конечно-элементного анализа ANSYS, в зависимости от величины воздушного зазора между магнитным держателем и пластиной. Было получено распределение модуля магнитной индукции по поперечному сечению магнитной системы для каждого значения воздушного зазора.
Разработана и собрана экспериментальная установка, из двух постоянных магнитов, для проведения измерений силы магнитного поля на один из магнитов в зависимости от величины зазора. Созданы различные конечно-элементные модели в программной системе конечно-элементного анализа ANSYS для расчета силы магнитного поля на один из постоянных магнитов. Исследована сходимость методов расчета в ANSYS в зависимости от величины воздушного слоя, окружающего систему и количества элементов модели. Проведено сравнение экспериментальных и расчетных результатов.
Оглавление
Введение. 5
Глава I. Основные положения метода конечных элементов для решения электромагнитных задач. 7
1.1. Постановка задач расчета электромагнитного поля электротехнического устройства. 7
1.2 Основные положения метода конечных элементов для решения электромагнитных задач. 10
Глава II. Магнитная пружина. 13
2.1. Численное решение. 13
2.1.1 Постановка задачи расчета поля и силы магнитного поля исследуемой установки. 13
2.1.2 Расчет магнитостатического осесимметричного поля в кусочно-однородной изотропной области для различных значений воздушного зазора между постоянными магнитами. 14
2.1.3 Расчет силы магнитного поля на верхний магнит устройства методами программной системы конечно-элементного анализа ANSYS. 16
2.1.4 Исследование сходимости методов расчета силы магнитного поля в зависимости от величина воздушного пространства, окружающего магнитную систему. 18
2.1.5 Исследование сходимости методов расчета силы магнитного поля в зависимости от количества элементов модели. 20
2.1.6 Расчет силы магнитного поля на верхний магнит устройства методами программной системы конечно-элементного анализа ANSYS с использованием элементов, моделирующих затухание поля в дальней зоне. Сравнение результатов. 22
2.1.7 Расчет магнитостатического трехмерного поля в кусочно-однородной трехмерной области. Расчет силы магнитного поля на нижний магнит устройства. Сравнение результатов. 24
2.1.7.1 Стратегии решения задачи. 24
2.1.7.2 Расчёт трёхмерной магнитостатической задачи на примере исследуемой установки. 26
2.2 Эксперимент. 29
2.2.1 Описание установки. 29
2.2.2 Экспериментальные данные. 30
2.3 Сравнение результатов рассчитанных методами программной системы конечно-элементного анализа ANSYS с экспериментальными. 31
Глава III. Магнитный Держатель. 33
3.1 Численное решение. 33
3.1.1 Постановка задачи расчета поля и силы магнитного поля исследуемой установки. 33
3.1.2 Расчет магнитостатического осесимметричного поля в кусочно-однородной изотропной области для различных значений воздушного зазора между магнитной системой и основанием. 35
3.1.3 Расчет силы магнитного поля на ферромагнитное основание методами программной системы конечно-элементного анализа ANSYS. 38
3.1.4 Исследование сходимости методов расчета силы магнитного поля в зависимости от количества элементов воздушного зазора между магнитным держателем и основанием. 38
3.3.5 Исследование явления насыщения железа в зависимости от толщины основания. Сравнение линейной и нелинейной задач. 42
3.2 Эксперимент. 44
3.3 Сравнение результатов. 47
Приложение. Охрана труда. 48
Список литературы. 58
Введение
Тела, являющиеся самостоятельными источниками магнитного поля, т.е. возбуждающие его при отсутствии обмоток, обтекаемых электрическими токами, называются постоянными магнитами. Свойства постоянных магнитов могут быть объяснены особой ориентировкой внутремолекулярных токов.
В настоящее время постоянные магниты активно применяются в различных отраслях: экология (магнитные системы очистки промышленных газовых и жидкостных выбросов, магнитные ловушки и зонды, сепараторы для линий переработки техногенных отходов и отработавшего оборудования), транспортные системы (магнитные системы, позволяющие перемещать магнитные материалы или специальные контейнера в различных плоскостях, не допускающих присутствия человека по тем, или иным причинам), компьютерная (моторы драйверов и компакт-дисков, шаговые двигатели дисководов).
Для большинства этих целей раньше применялись электромагниты. Это объяснялось тем, что по энергетическим и массогабаритным показателям постоянные магниты долгое время значительно уступали электромагнитам. Отметим два недостатка электромагнитов. Во-первых, электромагнит требует присоединения к мощному внешнему источнику питания. Во-вторых, при случайном разрыве питающей цепи удерживающая сила исчезает, что может привести к аварии.
Указанных недостатков лишены постоянные магниты. Постоянные магниты изготавливаются из магнитотвердых, с широкой петлей гистерезиса, материалов. Для магнитопроводов применяются магнитомягкие материалы. Основная особенность магнитных материалов состоит в том, что они способны сохранять запас магнитной энергии после воздействия на них достаточно сильного магнитного поля. [2] С развитием применения редкоземельных металлов появились высокоэнергетические постоянные магниты, пригодные для создания сильных магнитных полей. Постоянные магниты из порошковых материалов (спеченные и магнитопласты) на основе интерметаллического соединения Nd2Fe14B обладают наивысшими значениями магнитных свойств среди высококоэрцитивных материалов. Необходимые для производства магнитопластов высококоэрцитивные порошки обычно получают закалкой из жидкого состояния с последующей скоростной термической обработкой. Последнее необходимо для распада полученной при закалке расплава аморфной фазы.
Спеченные постоянные магниты на основе сплавов типа Nd-Fe-B обладают следующими преимуществами с точки зрения миниатюризации магнитных и электротехнических устройств.
-более высокие магнитные параметры по сравнению с литыми и ферритовыми магнитами (NdFeB в 8-10 раз мощнее ферритов)
-возможность создания сильных магнитных полей при малых габаритах
-одно из наилучших отношений энергетического произведения к цене
Эти обстоятельства позволяют существенно расширить область применения магнитных грузозахватных устройств.При проектировании таких устройств основное внимание следует уделить определению удерживающей силы.
В данной дипломной работы рассматриваются два устройства с постоянными магнитами NdFeB: магнитная пружина и магнитный держатель. Широкого применения в промышленности «магнитная пружина» пока не получила, но в будущем может быть использована там, где обычная пружина не применима. Уже сейчас спроектирована магнитная кровать голландским архитектором Janjaap Ruijssenaars. В ней содержится достаточно магнитов, чтобы удержать в воздухе до 900 кг.
Магнитный держатель предназначен для установки и фиксации деталей, в процессе сборочных и монтажных работ. Рассматривалось реальное устройство, для которого необходимо определить его удерживающую силу.
Глава I. Основные положения метода конечных элементов для решения электромагнитных задач
1.1 Постановка задач расчета электромагнитного поля электротехнического устройства
Математическим описанием непрерывных в пространстве и во времени процессов электромагнитного поля в технических объектах и системах являются дифференциальные уравнения в частных производных (уравнения математической физики). Различают стационарные (не меняющиеся во времени) и нестационарные (переменные, меняющиеся во времени) процессы. Стационарные процессы описываются эллиптическими уравнениями, а нестационарные – уравнениями параболического и гиперболического типов.
Эти уравнения для электромагнитных полей относительно характеристик поля (векторов напряженности электрического и магнитного полей E и H ; векторов электрической и магнитной индукции D и B ; векторного магнитного потенциала A, скалярного электрического потенциала получают из преобразования уравнений Максвелла.
Наиболее часто используемые эллиптические уравнения – это уравнения Лапласа и Пуассона, которыми в теории электромагнетизма описываются задачи электростатики и магнитостатики. Простейшим эллиптическим уравнением является уравнение Лапласа:
![]() [1]
[1]
где лапласиан (оператор Лапласа) ![]() . Этот оператор может быть применен к скалярным и векторным функциям. В декартовой системе координат уравнение Лапласа имеет вид
. Этот оператор может быть применен к скалярным и векторным функциям. В декартовой системе координат уравнение Лапласа имеет вид
 [2]
[2]
где (x, y, z) – скалярная функция.
В цилиндрической системе координат оно выглядит следующим образом:
 [3]
[3]
где (R, , z).
К уравнениям эллиптического типа относится уравнение Пуассона, которое для линейных изотропных (х = y = z = = const) сред имеет вид:
![]() [5]
[5]
Где ![]() - векторный магнитный потенциал ,
- векторный магнитный потенциал , ![]() - вектор плотности тока,
- вектор плотности тока,
![]()
-абсолютная магнитная проницаемость среды моделирования.
Если речь идет о нелинейных средах моделирования, т.е. const, то из уравнений Максвелла получим
![]() [6]
[6]
или
 [7]
[7]
Вектор-потенциал ![]() есть величина векторная и в декартовой системе координат
есть величина векторная и в декартовой системе координат
![]() ,
,
вектор плотности тока
![]() .
.
Тогда уравнение Пуассона разбивается на три уравнения относительно скалярных величины Аx, Аy, Аz.
Если в модели ЭУ принять, что ток, а следовательно, и векторный магнитный потенциал имеют только z-составляющую, то получим плоскопараллельную или осесимметричную задачу. Для плоскопараллельного магнитного поля в декартовой системе координат можно записать уравнение Пуассона
 [8]
[8]
Решив данное уравнение и зная распределение векторного магнитного потенциала по области моделирования, можно найти распределение составляющих вектора магнитной индукции и результирующего значения (модуля) вектора магнитной индукции по выражениям
![]() [9]
[9]
Для того чтобы уравнения Лапласа-Пуассона имели единственное решение, они дополняются граничными (краевыми) условиями. На замкнутой границе Г модели ЭУ могут быть заданы следующие краевые условия.
1. Граничные условия первого рода (Дирихле) – на границе Г задается значение искомой функции, т.е. = f1 (x, y, z), где точки с декартовыми координатами (x, y, z) принадлежат границе Г. Условие = 0 является однородным.
2. Граничные условия второго рода (Неймана). Для них задается изменение искомой функции по нормали n к границе Г, т.е d /dn= f2 (x, y, z), где точки с координатами (x, y, z)
принадлежат границе Г. Условие d/dn = 0 является однородным.
3. Граничные условия третьего рода d /dn + f3 () = f4 (x, y, z), где точки с координатами (x, y, z) принадлежат границе Г.
На границе модели могут быть заданы смешанные краевые условия, т.е. сочетание вышеприведенных – первого, второго и третьего рода.
1.2 Основные положения метода конечных элементов для решения электромагнитных задач
В настоящее время электромагнитные задачи для электротехнических устройств со сложной геометрией как внешних, так и внутренних границ, наличием достаточного количества подобластей модели устройства с различными магнитными и проводящими свойствами решаются численными, как правило, проекционно-сеточными методами, к которым относится и метод конечных элементов как модификация проекционных методов (Ритца, Галеркина и т.д.). Суть проекционных методов состоит в попытке аппроксимировать решение дифференциального уравнения конечной линейной комбинацией базисных (пробных) функций (функций формы), т.е. в том, чтобы найти «проекцию» или приближенное решение в конечномерном пространстве для непрерывного решения в бесконечномерном функциональном пространстве. Форма базисной функции и критерий вычисления коэффициентов линейной комбинации определяют проекционный метод. [1]
Дискретная модель непрерывной области строится следующим образом.
1. В области моделирования фиксируется конечное число точек. Эти точки называются узлами расчетной сети, которой покрывается область моделирования.
2. Значение непрерывной величины в каждой узловой точке считается переменной, которая и определяется.
3. Область моделирования непрерывной величины разбивается на конечное число подобластей, называемых элементами. Эти элементы имеют общие узлы, аппроксимируют форму области и представляют собой расчетную или триангуляционную сеть.
4. Непрерывная величина аппроксимируется на каждом элементе полиномом, который определяется с помощью узловых значений этой величины. Для каждого элемента определяется свой полином. Они подбираются таким образом, чтобы вдоль границ элемента величина была непрерывна.
Метод конечных элементов основан на аппроксимации непрерывной функции (потенциала, температуры и т.д.) дискретной моделью, которая строится на множестве кусочно-непрерывных функций, определенных на конечном числе подобластей, которые называются конечными элементами. В качестве функции элемента чаще всего используется полином. Классификацию КЭ можно провести в соответствии с порядком этих полиномов. Рассматриваются три группы элементов: симплекс-, комплекс- и мультиплекс-элементы.[1]
Классическим описанием двумерного симплекс-элемента является треугольник с прямолинейными сторонами и тремя узлами, по одному в каждой вершине. Как правило, используется последовательная нумерация узлов против часовой стрелки, начиная от некоторого i-го узла, который выбирается произвольно. Узловые значения скалярной величины обозначаются через ![]() , а координаты трех узлов – через
, а координаты трех узлов – через ![]() , что позволяет определить функции формы через координаты узлов расчетной сети.
, что позволяет определить функции формы через координаты узлов расчетной сети.
Глава II. Магнитная пружина
2.1 Численное решение
2.1.1 Постановка задачи расчета поля и силы магнитного поля исследуемой установки
Магнитная пружина представляет собой систему двух постоянных магнитов в подвижном корпусе из немагнитного материала. Корпус с одним из магнитов может перемещаться вдоль стального стержня, на верхнем конце которого зафиксирован второй магнит. Магнитная проницаемость и коэрцитивная сила постоянных магнитов равны µ=1,1, Нс=750![]() . Магнитная проницаемость стального стержня равна µ=500.
. Магнитная проницаемость стального стержня равна µ=500.
В работе поставлены и решены следующие задачи для данного устройства с постоянными магнитами.
Расчет магнитостатического осесимметричного поля в кусочно-однородной изотропной области для различных значений воздушного зазора между постоянными магнитами. Построение эквипотенциальных линий магнитного поля.
Расчет силы магнитного поля на нижний магнит устройства методами программной системы конечно-элементного анализа ANSYS.
Исследование сходимости методов расчета силы магнитного поля в зависимости от величина воздушного пространства, окружающего магнитную систему.
Исследование сходимости методов расчета силы магнитного поля в зависимости от количества элементов модели.
Расчет силы магнитного поля на нижний магнит устройства методами программной системы конечно-элементного анализа ANSYS с использованием элементов, моделирующих затухание поля в дальней зоне (2d задача). Сравнение результатов.
Расчет магнитостатического трехмерного поля в кусочно-однородной трехмерной области. Расчет силы магнитного поля на нижний магнит устройства. Сравнение результатов.
2.1.2 Расчет магнитостатического осесимметричного поля в кусочно-однородной изотропной области для различных значений воздушного зазора между постоянными магнитами
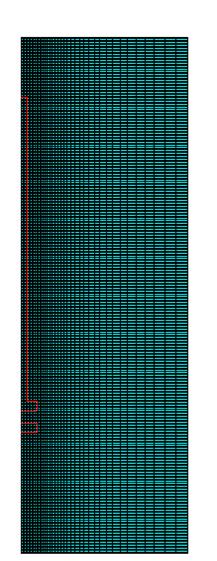
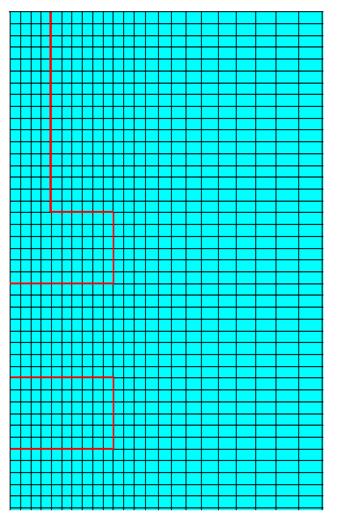
Рис 2.1. Вид созданной КЭ модели, воздушный зазор между магнитами 4мм.
В силу осесимметричности модели задача решалась в плоской постановке. Для создания КЭ модели используется элемент Plane53 – восьмиузловой элемент, для которого как геометрия, так и неизвестная функция задаются полиномом второй степени. В каждом узле он имеет одну степень свободы z-составляющую магнитного векторного потенциала Az. Тот факт, что магнитный поток принимается не выходящим за области модели, подразумевает, что поток будет параллелен внешним границам модели. Это допущение возможно, если размеры моделируемого воздушного пространства, окружающего магнитную систему, достаточны для решения поставленной задачи. Это допущение моделируется “потокопараллельным” граничным условием. Задача решалась для различных значений длины воздушного зазора между постоянными магнитами от 1-го мм до 17мм. Вид созданной КЭ модели приведен на рис.2.1 при величине воздушного зазора равного 4 мм.
Данная модель имеет 41561 узел и 13600 элементов, обладает 41561 степенью свободы.
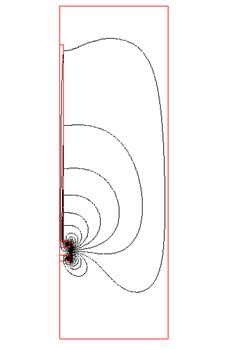
Рис.2.2 Эквипотенциальные линии магнитной индукции при величине воздушного зазора между постоянными магнитами равного 4мм.

Рис 2.3 Эквипотенциальные линии магнитной индукции вблизи магнитной системы при величине воздушного зазора между постоянными магнитами равного 4мм.
Из рис. 2.2 и рис.2.3 видно, что эквипотенциальные линии магнитной индукции не выходят за внешние границы модели т.к. использовалось “потокопараллельное” граничное условие.
2.1.3 Расчет силы магнитного поля на верхний магнит устройства методами программной системы конечно-элементного анализа ANSYS
В задаче, реализованной программной системой конечно-элементного анализа ANSYS, для каждого воздушного зазора рассчитывалась сила магнитного поля двумя различными методами: с помощью виртуальной работы и тензора Максвелла. Сила магнитного поля рассчитывалась на каждый элемент воздушного слоя, прилегающего к верхнему магниту, а затем суммировалась. Поэтому воздушный слой, окружающий объект на который рассчитывается сила магнитного поля, должен моделироваться элементами сетки квадратного вида для получения более точных результатов.
![]()

Рис. 2.4 Технические требования для расчета силы магнитного поля на исследуемый объект в программной системе конечно-элементного анализа ANSYS.
В таблице 2.1 приведены результаты расчета силы магнитного поля на верхний магнит с помощью программной системы конечно-элементного анализа ANSYS.
Таблица 2.1 Зависимость силы, действующей на верхний магнит от воздушного зазора между магнитами.
| № | Воздушный зазор, мм. | Метод расчета силы с помощью виртуальной работы, N | Метод расчета силы с помощью тензора напряжений Максвелла, N |
| 1 | 1 | 4,61 | 4,51 |
| 2 | 2 | 3,11 | 3,12 |
| 3 | 3 | 2,20 | 2,20 |
| 4 | 4 | 1,63 | 1,61 |
| 5 | 5 | 1,22 | 1,20 |
| 6 | 6 | 0,91 | 0,90 |
| 7 | 7 | 0,69 | 0,67 |
| 8 | 8 | 0,53 | 0,52 |
| 9 | 9 | 0,42 | 0,41 |
| 10 | 10 | 0,33 | 0,33 |
| 11 | 12 | 0,22 | 0,21 |
| 12 | 14 | 0,15 | 0,14 |
| 13 | 17 | 0,09 | 0,08 |
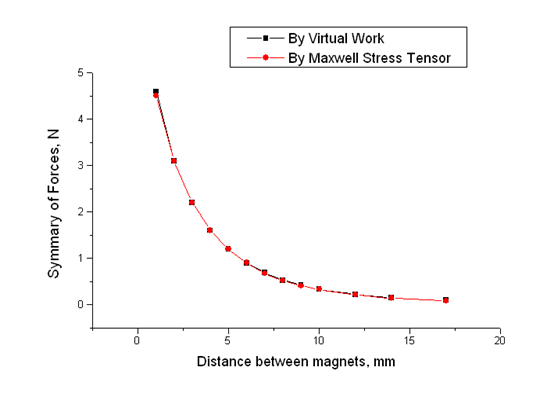
Рис.2.5 Зависимость силы магнитного поля, действующего на верхний магнит от величины воздушного зазора.
2.1.4 Исследование сходимости методов расчета силы магнитного поля в зависимости от величина воздушного пространства, окружающего магнитную систему
Была исследована сходимость методов расчета силы магнитного поля в зависимости от величины воздушного пространства, окружающего магнитную систему. Выбор оптимального воздушного пространства позволяет корректно использовать “потокопараллельное” граничное условие, и не перегружать программную систему конечно-элементного анализа ANSYS лишними расчетами.
Таблица 2.2 Анализ сходимости методов расчета силы магнитного поля на верхний магнит в зависимости от величина воздушного пространства, окружающего магнитную систему.
| № | Ширина модели воздушного слоя, окружающего магнитную систему, мм | Метод расчета силы с помощью виртуальной работы, N | Метод расчета силы помощью тензора напряжений Максвелла, N | Отклонение текущего значения к последнему (метод виртуальной работы) % | Отклонение текущего значения к последнему (Метод расчета с помощью тензора Максвелла) % |
| 1 | 5 | 1,8415 | 1,8114 | 26,60422 | 26,51223 |
| 2 | 8 | 2,213 | 2,1755 | 11,79753 | 11,74084 |
| 3 | 10 | 2,3146 | 2,275 | 7,74811 | 7,70417 |
| 4 | 30 | 2,487 | 2,4436 | 0,87684 | 0,86413 |
| 5 | 50 | 2,503 | 2,4591 | 0,23914 | 0,2353 |
| 6 | 70 | 2,5072 | 2,4632 | 0,07174 | 0,06897 |
| 7 | 100 | 2,509 | 2,4649 |

Рис.2.6 Зависимость силы магнитного поля, действующей на верхний магнит, от величины воздушного пространства, окружающего магнитную систему.
Из таблицы 2.2 и рис. 2.6 видно, что уже при ширине равной 30 мм воздушного пространства, окружающего магнитную систему. отклонение текущего значения к последнему меньше 1%. Поэтому в исследуемой модели ширина воздушного слоя выбирается равной 40мм, это в 8 раз больше радиуса постоянного магнита.
2.1.5 Исследование сходимости методов расчета силы магнитного поля в зависимости от количества элементов модели
Была исследована сходимость методов расчета силы магнитного поля в зависимости от количества элементов модели. Важно отметить, что точность вычислений существенно зависит от числа элементов модели.
Таблица №2.3 Анализ сходимости методов расчета силы магнитного поля на верхний магнит.
| № | Количество элементов модели | Метод расчета силы с помощью виртуальной работы, N | Метод расчета силы помощью тензора напряжений Максвелла, N | Отклонение текущего значения к последнему (метод виртуальной работы) % | Отклонение текущего значения к последнему (Метод расчета с помощью тензора Максвелла) % | Отклонение Текущего значения, полученного методом расчета с помощью тензора Максвелла от текущего значения, полученного методом виртуальной работы, % |
| 1 | 50 | 1,4732 | 0,3913 | 8,07 | 75,11 | 73,44 |
| 2 | 60 | 1,4740 | 0,3923 | 8,02 | 75,04 | 73,39 |
| 3 | 96 | 1,5177 | 0,3831 | 5,30 | 75,63 | 74,76 |
| 4 | 112 | 1,5589 | 0,5774 | 2,73 | 63,27 | 62,96 |
| 5 | 280 | 1,5832 | 1,2676 | 1,21 | 19,36 | 19,93 |
| 6 | 1000 | 1,5920 | 1,3496 | 0,66 | 14,15 | 15,23 |
| 7 | 8100 | 1,6038 | 1,5359 | -0,07 | 2,30 | 4,23 |
| 8 | 12120 | 1,6019 | 1,5500 | 0,04 | 1,40 | 3,24 |
| 9 | 20400 | 1,6026 | 1,5720 | 0,00 | 0,00 | 1,91 |
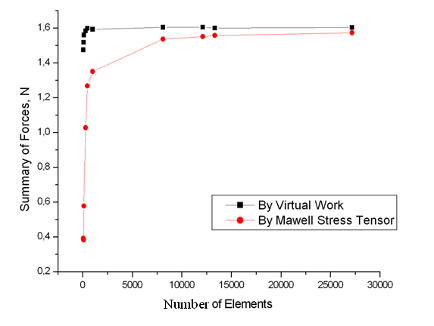
Рис. 2.7 Зависимость силы магнитного поля, действующей на верхний магнит, от количества элементов модели.
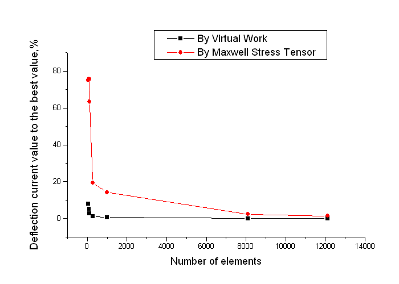
Рис.2.8 Отклонение текущей величины силы магнитного поля, действующей на верхний магнит от наилучшей последней величины в зависимости от количества элементов сетки модели.
Из рисунка 2.8 видно, что для метода расчета с помощью виртуальной работы, даже при грубой сетке в 50 элементов, сила магнитного поля, действующая на верхний магнит, дает отклонение не более 10% от значения, полученного для модели с сеткой в 20400 элементов. Рис.2.9. Для метода расчета с помощью Тензора Напряжений Максвелла отклонение значений силы магнитного поля, меняется в значительно более широком диапазоне от 75% до 1.4%, в зависимости от грубости сетки модели. Т.е. метод расчета с помощью виртуальной работы сходится быстрее, и требует намного меньше времени и ресурсов счета программой.

Рис.2.9 Вид созданной КЭ модели, воздушный зазор между магнитами 4мм, сетка модели 50 элементов.
2.1.6 Расчет силы магнитного поля на верхний магнит устройства методами программной системы конечно-элементного анализа ANSYS с использованием элементов, моделирующих затухание поля в дальней зоне. Сравнение результатов
Выше исследовалась модель с “потокопараллельным” граничным условием, которое подразумевало, что поток не будет выходить за внешние границы модели и будет параллелен им. Рассмотрим альтернативный вариант граничного условия: использование элементов не ограничивающих модель. На границе области зададим затухание магнитного поля в дальней зоне с помощью слоя элементов Infin110. Infin110 – восьмиузловой элемент, в каждом узле он имеет одну степень свободы z-составляющую магнитного векторного потенциала Az.

Рис.2.10 Вид созданной КЭ модели, воздушный зазор между магнитами 4мм.
Данная модель имеет 24019 узлов и 7920 элементов, обладает 24019 степенями свободы.
Рис.2.11 Эквипотенциальные линии магнитной индукции при величине воздушного зазора между постоянными магнитами равного 4мм.
Из рис. 2.11 видно, что эквипотенциальные линии магнитной индукции выходят за внешние границы модели т.к. в качестве граничного условия в модели использовались элементы, не ограничивающие модель (Infin).
Была рассчитана сила магнитного поля на нижний магнит модели. Сравнение результатов, с полученными ранее для модели с “потокопараллельным” граничным условием, приведено в таблице 2.4.
Таблица 2.4. Сравнение результатов расчета силы магнитного поля на нижний магнит для модели с воздушны зазором между магнитами 4мм.
| № | Метод расчета силы магнитного поля на нижний магнит модели. | Модель с “потокопараллельным” граничным условием, N | Модель с использованием элементов Infin, N | Отклонение результата модели с “потокопараллельным” граничным условием от модели с использованием элементов Infin, % |
| 1 | Virtual Work | 1.6044 | 1.6026 | 0.11 |
| 2 | Maxwell Stress Tensor | 1.4810 | 1.5720 | 5,79 |
По результатам таблицы 2.4 видно, что для метода виртуальной работы отклонения результата несущественно. Для метода расчета с помощью тензора напряжений Максвелла результаты хуже на 5.79%. Т.е для расчетов задач такого рода можно пользоваться обоими способами задания граничных условий.
2.1.7 Расчет магнитостатического трехмерного поля в кусочно-однородной трехмерной области. Расчет силы магнитного поля на нижний магнит устройства. Сравнение результатов
2.1.7.1 Стратегии решения задачи
Наилучшее приближение численного решения к параметрам реального устройства можно получить при помощи трехмерного моделирования, в котором учитываются все три пространственные координаты. В пакете Ansys реализованы алгоритмы для двух формулировок электромагнитных задач: векторной (Magnetic Vector Potential - MVP) и скалярной (Magnetic Scalar Potential - MSP).
Как отмечается в документации по пакету, метод магнитного векторного потенциала в сравнении с методом скалярного потенциала более труден в реализации модели, а также дает меньшую точность в моделях, содержащих области с различной магнитной проницаемостью.
Метод MVP реализуется при помощи КЭ типа SOLID97, при этом области тока являются частью конечно-элементной модели, и их параметры задаются как константы (Real Constants) соответствующих КЭ. Метод MSP реализуется при помощи КЭ типа SOLID96 и SOLID98, при этом области тока не являются частью конечно-элементной модели, а задаются специальными КЭ типа SOURC36, геометрическое пространство которых может пересекаться с пространством конечно-элементной сетки модели. Для этого случая в пакете существует макрос, при помощи которого можно легко задать катушку
намагничивания.
Для решения задач на основе скалярного магнитного потенциала в пакете ANSYS используются три стратегии:
1) Reduced Scalar Potential (RSP) Strategy – стратегия упрощённого скалярного потенциала;
2) Difference Scalar Potential (DSP) Strategy - стратегия разностного скалярного потенциала;
3) General Scalar Potential (GSP) Strategy - стратегия обобщённого скалярного потенциала.
Их различие состоит в некоторых упрощениях уравнений моделирующих поле. Стратегия решения задаётся пользователем на этапе решения. От её выбора зависит правильность результатов расчёта. [1]
2.1.7.2 Расчёт трёхмерной магнитостатической задачи на примере исследуемой установки .
Проводится расчет магнитостатического трехмерного поля для кусочно-однородной, линейной изотропной (абсолютная магнитная проницаемость µ = 1) среды моделирования исследуемой магнитной системы. Модель устройства приведена на рис. 2.12. Стальной стержень и постоянные магниты расположены в воздушной среде. Для разбиения модели устройства регулярной сеткой воздушная среда моделируется сплошным цилиндром.

Рис. 2.12 Модель устройства магнитной пружины.
Для создания КЭ модели используется элемент Solid96 – восьмиузловой элемент. В каждом узле он имеет одну степень свободы – суммарную составляющую электромагнитного потенциала. Вид созданной КЭ модели приведен на рис.2.13 при величине воздушного зазора равного 4 мм.

Рис. 2.13 Вид созданной КЭ модели магнитной пружины, воздушный зазор между магнитами 4мм.
Данная модель имеет 41561 узел и 13600 элементов, обладает 41561 степенью свободы.

Рис.2.14 Распределение модуля вектора магнитной индукции (BSUM).
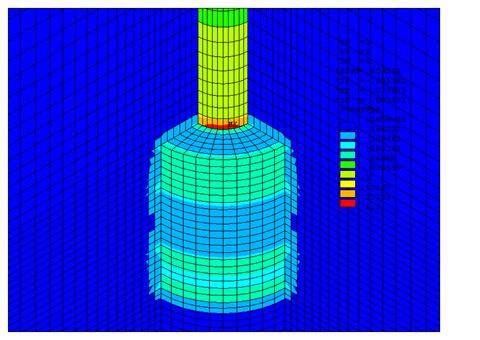
Рис.2.15 Распределение модуля вектора магнитной индукции (BSUM) вблизи системы постоянных магнитов.
Была рассчитана сила магнитного поля на нижний магнит модели. Сравнение результатов, с полученными ранее моделями приведено в таблице 2.5.
Таблица 2.5. Сравнение результатов расчета силы магнитного поля на нижний магнит для модели с воздушны зазором между магнитами 4мм.
| № | Метод расчета силы магнитного поля на нижний магнит модели. | Модель с “потокопараллельным” граничным условием, N | Модель с использованием элементов Infin, N |
3d модель, N |
| 1 | Virtual Work | 1.6044 | 1.6026 | 1.6049 |
| 2 | Maxwell Stress Tensor | 1.4810 | 1.5720 | 1.6129 |
По данным таблицы 2.5 видно, что расчет силы магнитного поля с использованием 3d модели дает наилучшую сходимость методов. Также важно отметить, что для каждой модели сила магнитного поля, рассчитанная методом виртуальной работы, дает результаты с точностью 10-2. Для расчетов аналогичных задач приемлема любая модель, однако менее трудоемким является способ с использованием первой модели.
2.2 Эксперимент
2.2.1 Описание установки
Исследуемая установка состоит из цилиндрического корпуса (пластмасса), направляющего стержня (сталь), электронных весов, измерительной шкалы и двух одинаковых постоянных магнитов марки NdFeB (неодим-железо-бор). В описываемой установке постоянные магниты расположены одноименными полюсами вертикально друг к другу, обеспечивая этим рабочий зазор. Первый магнит жестко зафиксирован в верхней части подвижного корпуса. В нижней части корпуса расположено отверстие для стального стержня, на верхнем конце которого прикреплен второй постоянный магнит.

Рис 2.16 Исследуемая установка с постоянными магнитами.
Стальной стержень с магнитной системой в корпусе установлен на электронные весы. На корпус и зафиксированный в нем верхний магнит прикладывается нагрузка, воздушный зазор между магнитами уменьшается. Это фиксируется с помощью измерительной шкалы. С помощью электронных весов измеряется нагрузка, приложенная к подвижному корпусу с верхним магнитом.
Таблица 2.6 Основные характеристики установки.
| № | Составная часть установки | Масса составной части установки, Гр. | Индукция насыщения, | Длина составной части установки, mm |
| 1 | Магнит NdFeB | 0.5 | 5 | 3 |
| 2 | Стальной стержень | 40 | 2 | 100 |
| 3 | Корпус | 6 | 6 | 150 |
2.2.2 Экспериментальные данные
Таблица 2.7. Зависимость силы, действующей на верхний магнит от воздушного зазора между магнитами.
| № | Воздушный зазор, мм. | Сила, действующая на верхний магнит, Н. |
| 1 | 1 | 4,46 |
| 2 | 2 | 3,66 |
| 3 | 3 | 2,40 |
| 4 | 4 | 1,68 |
| 5 | 5 | 1,28 |
| 6 | 6 | 0,91 |
| 7 | 7 | 0,70 |
| 8 | 8 | 0,56 |
| 9 | 9 | 0,41 |
| 10 | 10 | 0,33 |
| 11 | 12 | 0,21 |
| 12 | 14 | 0,12 |
| 13 | 17 | 0,06 |
Из рисунка 2.17 видно, что в первом приближении сила магнитного поля возрастает по экспоненте с уменьшением расстояния между постоянными магнитами.
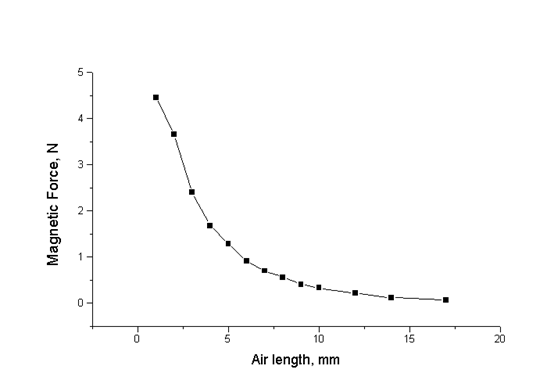
Рис.2.17. Зависимость силы, действующей на верхний магнит от воздушного зазора между магнитами.
2.3 Сравнение результатов рассчитанных методами программной системы конечно-элементного анализа ANSYS с экспериментальными
По данным таблицы 2.8 были построены графики зависимости силы магнитного поля от расстояния между магнитами. Рис.2.18
Таблица№2.8. Зависимость силы, действующей на верхний магнит от воздушного зазора между магнитами.
| № | Воздушный зазор, мм. | Эксперимент, Н. | Ansys, Н |
| 1 | 1 | 4,46 | 4,61 |
| 2 | 2 | 3,66 | 3,11 |
| 3 | 3 | 2,40 | 2,20 |
| 4 | 4 | 1,68 | 1,63 |
| 5 | 5 | 1,28 | 1,22 |
| 6 | 6 | 0,91 | 0,91 |
| 7 | 7 | 0,70 | 0,69 |
| 8 | 8 | 0,56 | 0,53 |
| 9 | 9 | 0,41 | 0,42 |
| 10 | 10 | 0,33 | 0,33 |
| 11 | 12 | 0,21 | 0,22 |
| 12 | 14 | 0,12 | 0,15 |
| 13 | 17 | 0,06 | 0,09 |
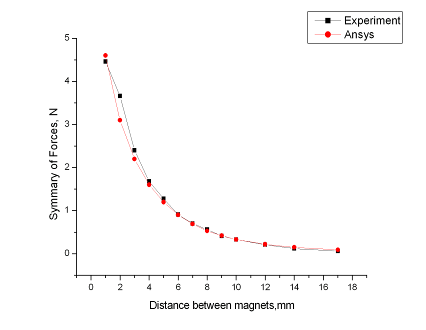
Рис.2.18 Зависимость силы магнитного поля от величины воздушного зазора между магнитами.
Глава III. Магнитный Держатель
3.1 Численное решение
3.1.1 Постановка задачи расчета поля и силы магнитного поля исследуемой установки
Магнитный держатель представляет собой систему из постоянного кольцевого магнита NdFeB и стального кольцевого магнитопровода. Магнитный держатель предназначен для установки и фиксации деталей, в процессе сборочных и монтажных работ. В данной постановке задачи он устанавливается на основание из технического железа. Техническое железо с содержанием углерода до 0,04%, углеродистые стали и чугун широко применяются для магнитопроводов, работающих в условиях постоянных магнитных полей. Техническое железо обладает высокой индукцией насыщения (до 2,2 Тл), высокой магнитной проницаемостью и низкой коэрцитивной силой.
Таблица 3.1 Основные характеристики установки.
| № | Составная часть установки | Материал | Коэрцитивная сила, Нс, А/м | Индукция насыщения, Вmax , Tл | Относительная магнитная проницаемость µср |
| 1 | Магнит | NdFeB | 750000 | 1,1 | |
| 2 | Корпус | Сталь 3 | 64 | 2 | Кривая В(Н) |
| 3 | Основание | Техническое железо | 64 | 1.5 | Кривая В(Н) |
В таблице 3.2 приведены данные химического состава стали 3, полученные с помощью масс-спекторометра фирмы Belec.
Таблица 3.2 Химический состав Стали 3.
| C | Si | Mn | P | S | Cu | Al | Cr | Ni | Sb. | Fe. |
| 0,146 | 0,071 | 0,5209 | 0,016 | 0,015 | 0,041 | 0,0006 | 0,024 | 0,025 | 0,032 | 99,11 |
Из данных таблицы 3.2 видно, что Сталь 3 на 99,11% состоит из железа. Для технического железа имеется кривая намагниченности В(Н), для стали 3 таких данных нет, поэтому при решении задачи для стали3 использовалась кривая В(Н) для технического железа, рис.3.1.

Рис. 3.1 Основная кривая намагниченности на диаграмме В-Н. для технического железа.
В главе 3 поставлены и решены следующие задачи для данного устройства с постоянным магнитом.
Расчет магнитостатического осесимметричного поля в кусочно-однородной изотропной области для различных значений воздушного зазора между магнитной системой и основанием.
Расчет силы магнитного поля на ферромагнитное основание методами программной системы конечно-элементного анализа ANSYS.
Исследование сходимости методов расчета силы магнитного поля в зависимости от количества элементов воздушного зазора между магнитным держателем и основанием.
Исследование явления насыщения железа в зависимости от толщины основания. Нелинейная задача.
3.1.2 Расчет магнитостатического осесимметричного поля в кусочно-однородной изотропной области для различных значений воздушного зазора между магнитной системой и основанием
Как и в главе 2 рассматривалась осесимметричная модель, поэтому задача решалась в плоской постановке. Для создания КЭ модели используется элемент Plane53 и “потокопараллельное” граничное условие.
Задача решалась для различных значений длины воздушного зазора между постоянными магнитами от 0,1 до 5мм. Вид созданной КЭ модели приведен на рис.3.2 и 3.3 при величине воздушного зазора равного 0.5 мм.

Рис.3.2 Вид созданной КЭ модели, воздушный зазор между магнитом и основанием 0.5 мм.
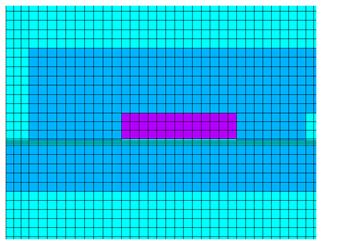
Рис.3.3 Вид созданной КЭ модели вблизи магнитной системы, воздушный зазор между магнитом и основанием 0.5 мм.
Данная модель имеет 30075 узлов и 9880 элементов, обладает 30075 степенями свободы.
Для каждой модели было получено распределение модуля вектора магнитной индукции. На рис. 3.4, 3.5, 3.6 приведены распределения модуля вектора магнитной индукции для зазоров 0.1, 0.5 и 5 мм соответственно.

Рис.3.4 Распределение модуля вектора магнитной индукции, воздушный зазор 0,1 мм.
Из рис. 3.4 видно, что техническое железо по всей толщине основания не насыщено.

Рис.3.5 Распределение модуля вектора магнитной индукции, воздушный зазор 0,5 мм.
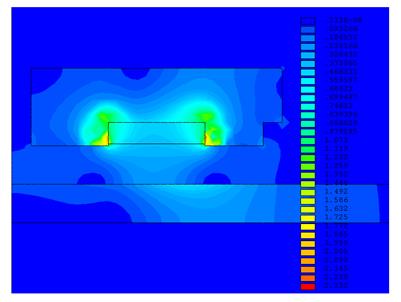
Рис.3.6 Распределение модуля вектора магнитной индукции, воздушный зазор 5 мм.
3.1.3 Расчет силы магнитного поля на ферромагнитное основание методами программной системы конечно-элементного анализа ANSYS
Программная система конечно-элементного анализа ANSYS рассчитывает дискретные модели. Для вычисления силы на тело необходимо, чтобы оно было окружено хотя бы одним слоем “воздушных” элементов. Это необходимо для метода виртуальной работы при элементарном перемещении объекта на который вычисляется сила в постоянном магнитном поле. Это означает, что программа не вычисляет силу при нулевом зазоре. В качестве минимального значения зазора принят 0,1 мм.
Таблица 3.3. Зависимость силы магнитного поля, действующей на верхний магнит от воздушного зазора между магнитом и основанием.
| № | Воздушный зазор, мм. | Метод расчета силы с помощью виртуальной работы, N | Метод расчета силы с помощью тензора напряжений Максвелла |
| 1 | 0,1 | 693,88 | 693,81 |
| 2 | 0,2 | 575,27 | 575,16 |
| 3 | 0,3 | 488,55 | 488,4 |
| 4 | 0,4 | 421,83 | 421,79 |
| 5 | 0,5 | 368,85 | 368,81 |
| 6 | 0,6 | 325,76 | 325,71 |
| 7 | 0,7 | 290,07 | 290,01 |
| 8 | 0,8 | 260,07 | 260,01 |
| 9 | 0,9 | 334,57 | 234,51 |
| 10 | 1 | 212,64 | 212,58 |
| 11 | 2 | 5,31 | 95,24 |
| 12 | 3 | 51,11 | 51,04 |
| 13 | 4 | 30,1 | 30,04 |
| 14 | 5 | 18,87 | 18,81 |
3.1.4 Исследование сходимости методов расчета силы магнитного поля в зависимости от количества элементов воздушного зазора между магнитным держателем и основанием
Важно отметить, что точность вычислений силы магнитного поля на ферромагнитное основание зависит от числа элементов по длине воздушного зазора, и от самой длины воздушного зозора. В этом месте модели происходят скачки свойств материалов: постоянный магнит – воздух – ферромагнитный материал. Чтобы получить погрешность мене 1% относительно последнего результата расчетов силы по тензору Максвелла, число элементов по кратчайшему расстоянию между магнитом и объектом, на который вычисляется сила, должно быть не менее четырех, а для метода виртуальной работы достаточно двух. Это справедливо для зазора, соизмеримого с размерами магнитной системы. Для минимального зазора, рассматриваемого в данной задаче, 0.1 мм, для метода расчетов силы по тензору Максвелла с погрешностью 1% достаточно двух элементов по длине воздушного слоя, для метода виртуальной работы достаточно и 1 элемента. Эти данные справедливы только для геометрии рассматриваемой модели, и их не рекомендуется обобщать на другие расчетные модели.
Таблица 3.4 Зависимость силы магнитного поля, действующей на основание, от количества элементов по длине воздушного зазора между магнитом и основанием. Длинна воздушного зазора 5 мм.
| 5 mm | ||||
| Количество элементов по длине воздушного зазора, шт. | Метод расчета силы с помощью виртуальной работы, N | Метод расчета силы с помощью тензора напряжений Максвелла, N | Отклонение текущего значения к последнему (метод виртуальной работы) % | Отклонение текущего значения к последнему (Метод расчета с помощью тензора Максвелла) % |
| 1 | 17,967 | 11,621 | 4,765186 | 38,2256 |
| 2 | 18,846 | 17,903 | 0,106011 | 4,832022 |
| 3 | 18,842 | 18,45 | 0,127213 | 1,924304 |
| 4 | 18,849 | 18,631 | 0,090109 | 0,962152 |
| 8 | 18,866 | 18,812 | ||

Рис. 3.8. Зависимость величины удерживающей силы от разбиения воздушного зазора, зазор 5мм.

Рис.3.9 Отклонение текущей величины удерживающей силы от последней величины в зависимости от количества элементов по длине воздушного зазора, зазор 5мм.
Таблица 3.4 Зависимость силы магнитного поля, действующей на основание, от количества элементов по длине воздушного зазора между магнитом и основанием. Длина воздушного зазора 0,1 мм.
| 0,1 mm | ||||
| Количество элементов по длине воздушного зазора, шт. | Метод расчета силы с помощью виртуальной работы, N | Метод расчета силы с помощью тензора напряжений Максвелла, N | Отклонение текущего значения к последнему (метод виртуальной работы) | Отклонение текущего значения к последнему (Метод расчета с помощью тензора Максвелла) % |
| 1 | 694,37 | 692,99 | -0,0735 | 0,122507 |
| 2 | 693,95 | 693,66 | -0,01297 | 0,025943 |
| 3 | 693,9 | 693,77 | -0,00576 | 0,010089 |
| 4 | 693,88 | 693,81 | -0,00288 | 0,004324 |
| 8 | 693,86 | 693,84 | ||

Рис. 3.10. Зависимость величины удерживающей силы от разбиения воздушного зазора, зазор 0,1мм.

Рис.3.11 Отклонение текущей величины удерживающей силы от последней величины в зависимости от количества элементов по длине воздушного зазора, зазор 0,1 мм.
3.3.5 Исследование явления насыщения железа в зависимости от толщины основания. Сравнение линейной и нелинейной задач
При вычислении удерживающей силы магнитного поля методами программной системы конечно-элементного анализа ANSYS можно использовать вместо кривой намагничивания материала среднее значение относительной магнитной проницаемости, если расчеты проводятся не в диапазоне насыщения материала. Это значительно упростит время расчетов и избавит от нелинейности в свойствах материала. Но для определения распределения магнитной индукции в рассматриваемом объекте такая замена недопустима.
Таблица. 3.5 Зависимость удерживающей силы от толщины пластины для постоянной магнитной проницаемости железа и заданной кривой намагничивания.
| № | µ=В\(µ0Н) | µ=500 |
| 1 | 197 | 688 |
| 2 | 404 | 674 |
| 3 | 620 | 676 |
| 4 | 694 | 677 |
| 5 | 694 | 640 |

Рис. 3.15. Зависимость удерживающей силы от толщины пластины для постоянной магнитной проницаемости железа и заданной кривой намагничивания.
Из рис. 3.15 видно, что для достижения высокой точности результатов необходимо задавать кривые намагничивания для материалов. Методы расчетов программной системы конечно-элементного анализа ANSYS, вычисляют силу магнитного поля на каждый элемент, моделирующий воздух, граничащий с объектом на который вычисляется сила. Затем полученные значения суммируются.
3.2 Эксперимент
В задачи эксперимента входило получить зависимость силы магнитного поля на ферромагнитное основание для различных зазоров между магнитным держателем и основанием. Магнитный держатель представляет собой систему из кольцевого постоянного магнита NdFeB и стального кольцевого магнитопровода. Рис.3.16
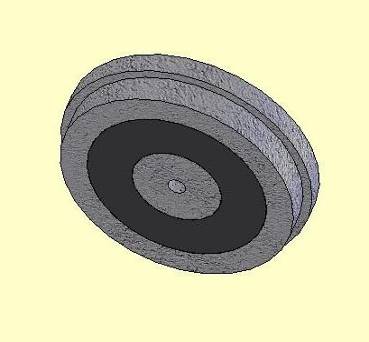
Рис.3.16 Магнитный держатель.
Эксперимент проводился на разрывной машине, которая предназначена для статических испытаний на растяжение металлов, а также для испытания на сжатие и изгиб, кратковременную ползучесть, релаксацию и малоцикловую усталость материалов. Рис. 3.17 Для научно-исследовательских целей, машина оснащена тремя типами датчиков – нагрузки, деформации, и перемещения. Машина 19858У-10-1 представляет собой комплексную установку, составными частями которой являются модуль силовозбуждения, модуль измерения и управления, установка температурная и соединительные кабели. [5] Допускаемая погрешность измерения силы при прямом ходе (нагружении) не превышает 1% измеряемой нагрузки, начиная с 200 Н для диапазона [10..1000 Н].
Магнитную систему закрепили в верхнем захвате разрывной машины. Затем опустили захват на расстояние 3 – 5 мм до ферромагнитного основания, вытащили фиксатор, «палец», и магнитная система «упала» на основание. Затем снова опустили захват и вставили фиксатор на место. Эти действия было необходимо проделать, чтобы начальная нагрузка на магнитную систему была нулевой. Далее поднимали захват, увеличивая силу с шагом 10 Н, фиксировалось максимальное значение силы. Эксперимент проводился для различных зазоров между магнитной системой и основанием. Зазоры создавали прокладками из немагнитных материалов различной толщины. Экспериментальные данные представлены в таблице 3.6.
В ходе эксперимента возник ряд трудностей. Во первых захват перемещался только в вертикальном направлении, поэтому только один край магнитного держателя плотно лежал на ферромагнитном основании. Если бы удалось отрегулировать положение магнита, то значение силы отрыва было бы больше. Во вторых используемый силовой датчик был предназначен для работ в диапазоне [100..10000Н]. В этом диапазоне он работает с погрешностью измерения 1% от измеряемой нагрузки. В диапазоне [0..100Н] данный датчик использовать не рекомендуется. При малых зазорах, от 0 до 0.5 мм, погрешность измерений возникала главным образом из-за плохого контакта магнитного держателя с поверхностью ферромагнитного основания. При зазорах от 0.5 до 4 мм погрешность измерений возникала из-за недостаточной чувствительности силового датчика.
Таблица 3.6. Зависимость силы магнитного поля, действующего на ферромагнитную пластину от величины зазора между магнитным держателем и пластиной.
| № | Зазор, мм. | Сила, Н | |
| 1 | 0 | 650 | |
| 2 | 0.15 | 460 | |
| 3 | 0.3 | 410 | |
| 4 | 0.5 | 320 | |
| 5 | 0.7 | 270 | |
| 6 | 1 | 210 | |
| 7 | 1.5 | 130 | |
| 8 | 2 | 11 | |
| 9 | 3 | 7 | |
| 10 | 4 | 6 | |
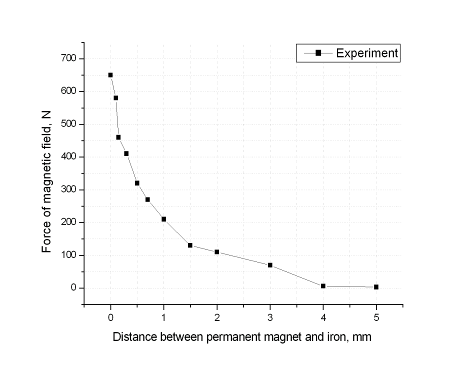
Рис.3.18 График зависимости удерживающей силы магнитного поля, действующего на ферромагнитное основание от расстояния между магнитным держателем и основанием.
3.3 Сравнение результатов
Из рис. 3.19 видно, что экспериментальная кривая и рассчитанная совпадают.
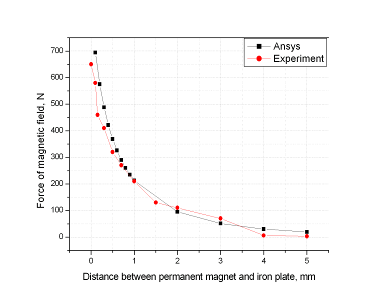
Рис. 3.19 График зависимости удерживающей силы магнитного поля, действующего на ферромагнитное основание от расстояния между магнитным держателем и основанием.
Заключение
В данной дипломной работе рассматривалось два реальных устройства магнитная пружина и магнитный держатель.
Магнитная пружина – демпфер, для нее было важно определить максимальную удерживающую силу. Используемые в системе магниты были малогабаритные, поэтому провести эксперимент не представляло трудности. Результаты эксперимента совпали с расчетными данными, поэтому можно использовать программный комплекс ANSYS для решения подобных задач. Также были рассмотрены различные конечно-элементные расчетные модели для сравнения полученных результатов и выбора оптимального варианта. Была исследована сходимость методов расчета программной системы конечно-элементного анализа ANSYS в зависимости от числа элементов модели.
Приложение
Охрана труда
Настоящая дипломная работа носит научно-исследовательский характер, поэтому исполнитель большую часть рабочего времени проводит за компьютером. Наибольшая эффективность научно-исследовательской работы достигается при использовании большого числа ЭВМ, сосредоточенных в одном месте, то есть при ведении разработки в ВЦ. В данном разделе мы рассмотрим вопросы охраны труда в ВЦ.
Критериями выбора оптимального варианта при решении вопросов организации производства, тем более такого сложного как ВЦ, является техническая эффективность и соответствие этого варианта требованиям эргономики и охраны труда.
Эргономикой изучаются возможности и особенности деятельности человека в процессе труда с целью создания таких условий, методов и организаций трудовой деятельности, которые делают трудовой процесс наиболее производительным и вместе с тем обеспечивают безопасность и удобство работающему, сохраняют его здоровье и работоспособность.
Общая характеристика санитарно-гигиенических условий труда
Расчет задачи производится на рабочем месте, оснащенном персональным компьютером или рабочей станцией с видеотерминалом (ВДТ), с использованием магнитных и лазерных дисков. Также могут использоваться принтеры, и дисковые и ленточные накопители. Основными факторами, воздействующими на персонал в ВЦ, являются:
Микроклимат помещения
Эргономика рабочих мест
Уровень шума
Освещение
Излучение от аппаратуры (рентгеновское, радиочастотное, и т.д.)
Эмоциональные и сенсорные нагрузки
Ядовитые, токсичные, радиоактивные и биологически активные вещества в производственном процессе ВЦ не используются. Работа инженера в ВЦ не связана с тяжелыми физическими нагрузками. При эксплуатации аппаратуры ВЦ может возникнуть опасность возгорания или поражения электрическим током.
Работа инженера связана с повышенным эмоциональным напряжением – инженеру, как правило, приходится творчески решать нетривиальные задачи, для которых не существует готового алгоритма решения. Выбор среди возможных вариантов решения часто делается в условиях недостатка информации. Также инженеру приходится удерживать в памяти большое количество информации об используемых библиотеках и инструментах. Рабочее место инженера оснащено как минимум одним ВДТ, и более половины рабочего времени инженер проводит в работе за ВДТ. Работа за ВДТ связана с напряжением зрения и пониженной мышечной активностью. Работающие ВДТ и другие устройства являются источниками электромагнитного излучения.
В следующих разделах мы более подробно рассмотрим факторы, влияющие на работу в ВЦ.
Микроклиматические условия
Микроклимат рабочего помещения должен обеспечивать сохранение теплового баланса и ощущение теплового комфорта работающих. Оптимальные значения показателей микроклимата создают предпосылки для высокой производительности труда. Требования к показателям микроклимата производственных помещений определены в СанПиН 2.2.4.548-96 «Гигиенические требования к микроклимату производственных помещений» и ГОСТ 12.1.005-88 “Система стандартов безопасности труда. Общие санитарно-гигиенические требования к воздуху рабочей зоны”. Согласно СанПиН 2.2.4.548-96, показателями, характеризующими микроклимат в производственном помещении, являются:
температура воздуха;
температура поверхностей;
относительная влажность воздуха;
скорость движения воздуха;
интенсивность теплового облучения;
Согласно характеристике категорий работ, приведенной СанПиН 2.2.4.548-96, работа инженера относится к категории 1а (работы, производимые сидя и не требующие физического напряжения, при которых расход энергии составляет до 120 ккал/ч). Работа инженера является работой операторского типа и связана с нервно-эмоциональным напряжением, поэтому на местах работы инженеров необходимо соблюдать оптимальные величины показателей микроклимата. Оптимальные нормы температуры составляют 23-25° C для теплого периода года и 22-24 °C для холодного. Оптимальные значения относительной влажности составляют 60-40%. Скорость движения воздуха не должна превышать 0.1 м/c. Концентрация пыли должна быть не более 0.3 мг/м3 при размере частиц не более 5 микрон. Нормы подачи свежего воздуха приведены в табл. 6.2.
Таблица 4.1 Нормы подачи воздуха в помещение в зависимости от объема на одного работающего.
| Объем помещения на одного работающего, м3 | Норма подачи воздуха,м3/ч |
До 20 20 – 40 от 40 |
не менее 30 не менее 20 естественная вентиляция |
Эргономика рабочих мест
Рассмотрим более подробно требования эргономики, предъявляемые к рабочему месту оператора при работе с ВТ. Рабочее место должно быть приспособлено для конкретного вида деятельности, и учитывать физические и психические особенности и антропометрические данные работающих.
Все ВТ должны иметь гигиенический сертификат, включающий в том числе оценку визуальных параметров. Конструкция и расположение ВТ должны обеспечивать надежное и комфортное считывание информации. Все ВТ должны иметь ручки регулировки яркости и контраста. Требования к характеристикам определены в ГОСТ Р50948-96 “Средства отображения информации индивидуального пользования. Общие эргономические требования и требования безопасности”, ГОСТ Р50949-96 “Средства отображения информации индивидуального пользования. Методы измерений и оценки эргономических параметров и параметров безопасности” и СанПиН 2.2.2.542-96 “Гигиенические требования к видеодисплейным терминалам, персональным электронно-вычислительным машинам и организации работы”.
При размещении ВТ на рабочем месте учитываются границы полей зрения оператора ВТ, которые определяются положением глаз и головы. Различают зоны зрительного наблюдения в вертикальной плоскости, ограниченные определенными углами, в которых располагают экран ВТ (45°-60°), пюпитр (35°-45°) и клавиатура. При периодическом наблюдении за экраном рекомендуется располагать элементы оборудования так, чтобы экран находился справа, клавиатура — напротив правого плеча, а документы — в центре угла обзора. При постоянной работе экран должен быть расположен в центре поля обзора, документы — слева на столе или специальной подставке.
Рабочий стол должен иметь стабильную конструкцию. Плоскость стола выбирается в зависимости от размера документов. При больших размерах документов она должна быть 160 x 90 см. Плоскость стола, а также сидение должны регулироваться по высоте. Высота плоскости стола должна регулироваться в диапазоне 65-85 или 68-84 см. При этом высота от горизонтальной линии зрения до рабочей поверхности стола при выпрямленной рабочей позе должна быть 40-50 см. Высота сидения от пола должна регулироваться в пределах 42-55 см.
Покрытие стола должно быть матовым, с коэффициентом отражения 20-50%, и легко чиститься; углы и передняя грань доски должны быть закругленными. Высота пространства под столом для ног рекомендуется порядка 60 см на уровне колен и не менее 80 см на уровне ступней.
Тип рабочего кресла выбирается в зависимости от продолжительности работы. При длительной работе кресло должно быть массивным, при кратковременной – легкой конструкции, свободно отодвигающееся.
Сидение должно быть удобным, иметь закругленные края, наклоняться по отношению к горизонтали вперед на 2° и назад на 14°. Его размеры не должны превышать 40x40 см. Высота спинки кресла рекомендуется 48-50 см от поверхности сидения и с регулировкой в передне-заднем направлении. На высоте 10-20 см от сидения спинка должна быть оборудована поясничным опорным валиком.
Шум
Основными источниками шума на рабочем месте оператора ВТ являются персональный компьютер (рабочая станция) и периферийные устройства (принтеры, внешние накопители и т.д.). Шум представляет собой сочетание не несущих полезной информации звуков, различных по интенсивности и частоте в частотном диапазоне 16-20 кГц. Шум вредно воздействует не только на органы слуха, но и на весь организм человека в целом через центральную нервную систему. Шум может являться причиной преждевременного утомления, ослабления внимания, памяти. Допустимые уровни шума на рабочих местах определены в ГОСТ 12.1.003-83, ГОСТ 12.1.012-90 (уровни вибрации), СН 3223-85.
Характеристикой постоянного шума на рабочих местах является уровень звукового давления в децибелах в установленных октавных полосах (среднегеометрические частоты 63, 125, 250, 500, 1000, 2000, 4000, 8000 Гц). Постоянным считается шум, уровень звука которого за 8-часовой рабочий день изменяется во времени не более чем на 5дБА. Характеристикой непостоянного шума является интегральный критерий — эквивалентный уровень звукового давления, измеряемый по шкале, имитирующей кривую чувствительности уха человека.
В табл. 6.4 приведены предельно допустимые значения уровня шума для данного производственного помещения в отдельных октавных полосах.
Таблица 4.2 Предельно-допустимые уровни шума.
| Среднегеометрические частоты октавных полос, Гц | Уровни звукового давления, дБА |
| 63 | 79 |
| 125 | 70 |
| 250 | 63 |
| 300 | 58 |
| 1000 | 55 |
| 2000 | 52 |
| 4000 | 50 |
| 8000 | 49 |
Для помещения, в котором осуществляется эксплуатация ЭВМ, предельно допустимый эквивалентный уровень звука 60 дБ. Воздействие вибрации, инфра- и ультразвука на рабочем месте программиста отсутствует.
Освещение
Нормы освещения для помещений с видеотерминалами определены в СанПиН 2.2.2.542-96 “Гигиенические требования к видеодисплейным терминалам, персональным электронно-вычислительным машинам и организации работы”. Согласно СанПиН 2.2.2.542-96, помещения с видеотерминалами (ВДТ) и ЭВМ должны иметь естественное и искусственное освещение. Естественное освещение должно осуществляться через светопроемы, ориентированные преимущественно на север и северо-восток. Искусственное освещение в помещениях эксплуатации ВДТ и ПЭВМ должно осуществляться системой общего равномерного освещения. В производственных и административно-общественных помещениях, в случаях преимущественной работы с документами, допускается применение системы комбинированного освещения (к общему освещению дополнительно устанавливаются светильники местного освещения, предназначенные для освещения зоны расположения документов). Освещенность на поверхности стола в зоне размещения рабочего документа должна быть 300-500 лк.
Допускается установка светильников местного освещения для подсветки документов. Местное освещение не должно создавать бликов на поверхности экрана и увеличивать освещенность экрана более 300 лк. Освещение рабочих поверхностей осуществляется с помощью люминесцентных ламп ЛБ белого света, которые предназначены для помещений с нормальными условиями труда.
Освещение должно способствовать уменьшению зрительного утомления работающих, что обеспечивается следующим образом:
постоянством освещенности в пространстве и во времени, для чего источники света должны быть закреплены, а колебания напряжения сети должны находиться в пределах санитарной нормы 220 ± 5В;
достаточной и равномерно распределенной яркостью освещения, при которой отношение максимальной освещенности к минимальной не превышает 2-3;
отсутствием ослепления, что достигается изъятием из поля зрения блестящих поверхностей, а также увеличением высоты подвеса светильников, выбором светильников с рассеянным светом.
Излучения
Используемое в ВЦ оборудование: ЭВМ, их мониторы (ВДТ) и периферийные устройства при своей работе генерируют неионизирующее электромагнитное излучение в разных полосах частот. Работающие ВДТ с электронно-лучевой трубкой также являются источниками ионизирующего излучения.
Допустимые и оптимальные уровни ионизирующих и неионизирующих излучений определены в ГОСТ Р 50948-96 “Дисплеи. Средства отображения информации индивидуального пользования. Общие эргономические требования и требования безопасности и СанПиН 2.2.2.542-96 “Гигиенические требования к видеодисплейным терминалам, персональным электронно-вычислительным машинам и организации работы. Допустимые значения параметров излучения ВДТ приведены в табл. 6.6 (данные ограничения должны соблюдаться при любых установках и режимах работы ВДТ)
Таблица 4.3 Допустимые значения параметров электромагнитных излучений.
| Наименование параметра | Допустимое значение |
| Доза рентгеновского излучения в любой точке на расстоянии 0,05 м. от экрана и корпуса ВДТ | 7,74х10 А/кг (100 мкР/час) |
| Напряженность электромагнитного поля по электрической составляющей на расстоянии 50 см от поверхности видеомонитора | 10 В/м |
| Напряженность электромагнитного поля по магнитной составляющей на расстоянии 50 см от поверхности видеомонитора | 0,3 А/м |
| Напряженность электростатического поля не должна превышать (для взрослых пользователей): | 20 кВ/м |
Напряженность электромагнитного поля на расстоянии 50 см вокруг ВДТ по электрической составляющей должна быть не более: - в диапазоне частот 5 Гц - 2 кГц; - в диапазоне частот 2 – 400 кГц |
25 В/м 2,5 В/м |
Плотность магнитного потока должна быть не более: - в диапазоне частот 5 Гц - 2 кГц; - в диапазоне частот 2 – 400 кГц |
250 нТл 25 нТл |
| Поверхностный электростатический потенциал не должен превышать | 500 В |
Все наличествующее на сегодняшний день в продаже новое оборудование должно отвечать установленным на территории РФ требованиям по параметрам излучения.
Электробезопасность
Электропитание используемого в ВЦ оборудования осуществляется от однофазной сети переменного тока номинальным напряжением 220В/50 Гц с заземленной нейтралью. По степени опасности поражения людей электрическим током рабочее помещение ВЦ относится к категории помещений без повышенной опасности, поскольку является сухим, нежарким, непыльным, с нетокопроводящим полом. Возможность случайного одновременного прикосновения к токоведущим частям и заземленным конструкциям при штатной работе отсутствует.
Тем не менее, для защиты от поражения электрическим током и статическим электричеством должно быть выполнено заземление корпусов оборудования. Также должны быть приняты меры защиты от статического электричества согласно ГОСТ 12.4.124-83 “Средства защиты от статического электричества”.
Список литературы
1. Андреева Е. Г., Шамец С. П. Расчет стационарных магнитных полей и характеристик электротехнических устройств с помощью программного пакета ANSYS. Учеб. Пособие. Омск: Изд-во ОМГТУ, 1992, 92с.
2. Арнольд Р.Р. Расчет и проектирование магнитных систем с постоянными магнитами. Уч.-изд. Москва: Изд-во «Энергия», 1969, 184с.
3. Иродов И. Е. Электромагнетизм. Учеб. Пособие. Москва: Изд-во «Бином». Лаборатория знаний, 2003, 319с.
4. Тамм И.Е. Основы теории электричества. Учеб. Пособие для вузов. – 11-е изд., испр. и доп. Москва: Изд-во «ФИЗМАЛИТ»,2003, 616с.
5. Хризолитов А.А. Машина универсальная для испытания материалов 1958У-10-I. Паспорт 4У2.773.066 ПС. 1980.