Исследование устойчивости разомкнутой системы электропривода ТПН-АД
СОДЕРЖАНИЕ: Природа возникновения колебаний, виды и особенности колебательных процессов. Методика исследования и оценка устойчивости разомкнутой системы электропривода ТПН-АД, а также алгоритм его модели. Методы решения дифференциальных уравнений электропривода.ИССЛЕДОВАНИЕ УСТОЙЧИВОСТИ РАЗОМКНУТОЙ СИСТЕМЫ ЭЛЕКТРОПРИВОДА ТПН-АД
1. Природа возникновения колебаний, виды и особенности колебательных процессов
Одним из актуальных вопросов исследования динамических режимов работы электропривода «Тиристорный преобразователь напряжения – асинхронный двигатель» является исследование устойчивости ЭП. Как показали эксперименты, в разомкнутых системах ЭП ТПН-АД с синхронизацией с напряжением сети на рабочем участке механических характеристик, в ряде случаев, могут наблюдаться устойчивые автоколебания выходных величин [4,40,42]. Колебания нарушают нормальную работу разомкнутых систем ЭП, усложняют расчет и настройку замкнутых систем, ухудшают качество регулирования координат и энергетику ЭП.
Характер и количественные показатели колебательных процессов весьма различны. Они зависят от множества параметров и факторов, в число которых можно включить
величину угла включения вентилей;
параметры АД;
моменты нагрузки на валу АД;
суммарный приведенный момент инерции электропривода;
начальные электромагнитные условия (НЭМУ);
начальную скорость АД;
схемотехническую конструкцию ТПН и способ синхронизации вентилей.
Это определяет задачу по разработке методов исследования устойчивости разомкнутой системы электропривода ТПН-АД, а также оценки влияния различных факторов и параметров ЭП на вид и характер колебательных процессов.
Появление автоколебаний в разомкнутых системах ЭП ТПН-АД, возможно объяснить наличием положительной обратной связи между углом сдвига тока нагрузки и амплитудой первой гармоники выходного напряжения преобразователя, а так же нелинейностью параметров электропривода. Колебательный процесс можно условно разделить на две категории - режимы «малых» и «больших» колебаний [4].
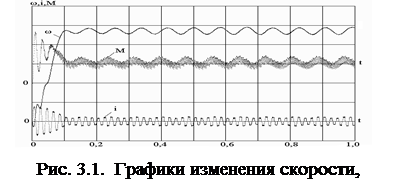
«Малые» колебания - это незатухающие гармонические колебания выходных параметров АД при условии, что скорость ротора изменяется в пределах первого квадранта (не превышает синхронную, т.е. 0 w w0). Физически, этот вид автоколебаний связан с обменом энергии между электромагнитными контурами и инерционными маховыми массами электропривода. Характерные графики изменения скорости, момента и тока статора АД в режиме «малых» колебаний представлены на рис. 3.1. Графики построены при помощи модели электропривода ТПН-АД.
Особенности процессов в режиме больших колебаний позволяют говорить о том, что их возникновение связано, не столько с изменением скорости ротора и обменом энергии, сколько с колебательным движением и взаимодействием между собой обобщенных векторов напряжения сети и ЭДС обмоток статора, а так же потокосцеплений статора и ротора.
Вторая категория – это режим больших колебаний (рис 3.2). В данном случае скорость двигателя может превысить синхронную, а область колебаний охватывает первый и второй квадранты.
2. Методика исследования устойчивости разомкнутой системы электропривода ТПН-АД
Динамические свойства асинхронных двигателей. Реальные переходные процессы асинхронного электропривода сопровождаются изменением скорости двигателя. Однако, в ряде случаев, полезно использовать результаты решения системы дифференциальных уравнений асинхронной машины при постоянной скорости ее вращения. Расчетная структурная схема разомкнутой системы электропривода ТПН-АД изображена на рис.3.3 [10, 40].
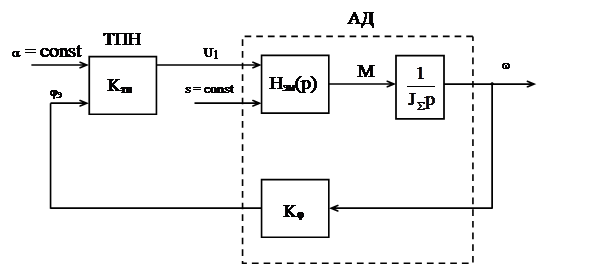 |
Рис. 3.3. Расчетная структурная схема разомкнутой системы ЭП ТПН-АД
Характерной особенностью приведенной схемы является применение зависимости фазы тока не от скольжения, а от текущего значения скорости. При таком представлении выходные сигналы всех звеньев имеют прямую зависимость от входных сигналов, а внутренний контур системы представляет положительную обратную связь. При математическом описании элементов структурной схемы выполняется учет их нелинейных свойств.
Асинхронный двигатель изображается тремя звеньями с передаточными функциями, которые обозначаются
![]() – передаточная функция электромагнитной части АД;
– передаточная функция электромагнитной части АД;
 – передаточная функция электромеханической части ЭП;
– передаточная функция электромеханической части ЭП;
![]() – передаточная функция звена внутренней обратной связи, по углу нагрузки;
– передаточная функция звена внутренней обратной связи, по углу нагрузки;
где Кj - ![]() - переменная величина, зависящая от значения скорости;
- переменная величина, зависящая от значения скорости;
JS – суммарный приведенный момент инерции ЭП.
Тиристорный преобразователь представлен усилительным звеном с коэффициентом усиления Ктп, который при переходе к приращениям определяется [9]
 , (3.1)
, (3.1)
в точке, определяемой углом управления a и скольжением s.
Существенная нелинейность, вводимая вентилями учитывается за счет аппроксимации выходного напряжения ТПН. Уравнения амплитуды напряжения первой гармоники U1, полученные в процессе идентификации имеют вид [3]
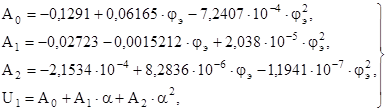 (3.2)
(3.2)
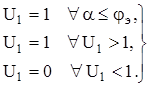
с учетом рекомендуемых ограничений
Фаза тока определяется по эквивалентным значениям активных и реактивных составляющих сопротивлений схемы замещения АД
 (3.4)
(3.4)
где xэ, rэ - эквивалентные сопротивления асинхронного двигателя для Т-образной схемы замещения, которые определяются по выражениям
 (3.5)
(3.5)
Звено, характеризующее электромагнитную часть асинхронного двигателя, описывается на основании аналитического выражения, определяющего переходную составляющую электромагнитного момента АД, как реакцию на скачок входного напряжения [87]
![]() (3.6)
(3.6)
Это выражение содержит девять составляющих, из которых первая – это установившееся значение момента, две - экспоненциальные, три - косинусные и три - синусные составляющие
 (3.7)
(3.7)
![]() (3.8)
(3.8)
![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
![]() (3.11)
(3.11)
![]() (3.12)
(3.12)
![]() (3.13)
(3.13)
![]() (3.14)
(3.14)
![]() (3.15)
(3.15)
Амплитуды Аi, частоты свободных колебаний Wi и постоянные времени затухания Ti экспоненциальных и периодических составляющих зависят от параметров двигателя, значений скольжений ротора и характеризуются двумя коэффициентами затухания (a1, a2) и двумя базовыми частотами колебаний (w1, w2) [87]
 (3.16)
(3.16)
Коэффициенты а и b находятся по выражениям
 (3.17)
(3.17)
Коэффициенты А и В определяются
 (3.18)
(3.18)
 (3.19)
(3.19)
где r1, r2 - активные сопротивления статора и ротора АД, соответственно;
xs, xr, x0 – реактивные сопротивления, соответственно, статора, ротора и цепи намагничивания АД, определяемые по схеме замещения.
Нелинейные свойства АД учитываются за счет изменения величин сопротивлений xэ и rэ и, как следствие угла нагрузки jэ.
Рассмотрим свойства двигателей при скольжениях в диапазоне 0 s sк, т.е. на рабочем участке механической характеристики.
На рис. 3.4 изображены графики составляющих электромагнитного момента при включении с нулевыми НЭМУ и номинальным скольжением АД для нескольких четырехполюсных асинхронных двигателей серии 4А различных типоразмеров. Расчет значений графиков выполнялся при учете всех составляющих (3.7) -(3.15), при нулевых начальных электромагнитных условиях и постоянном скольжении, равном номинальному. В табл. 3.1 приведены параметры, характеризующие каждую из составляющих АД. Для экспоненциальных составляющих – это амплитуды и электромагнитные постоянные времени затухания, для косинусных и синусных составляющих – это максимальные амплитуды, электромагнитные постоянные времени затухания и частоты свободных колебаний. Параметры АД приняты в соответствии с данными, приведенными в [21].
Приведенные результаты дают возможность проследить характер изменения отдельных составляющих в зависимости от параметров электродвигателей. Так, амплитуды экспоненциальных и косинусных составляющих более выражены у двигателей меньшей мощности. С ростом мощности АД они значительно уменьшаются. Синусные составляющие, напротив, более сильно проявляются с ростом мощности АД. Электромагнитные постоянные времени затухания Тi значительно зависят от параметров двигателей. Очевидно, что при постоянном скольжении постоянные времени затухания отдельных составляющих увеличиваются с ростом номинальной мощности АД. Это подтверждает известный факт, что суммарный электромагнитный момент маломощных двигателей гораздо раньше достигает установившегося значения. Важно отметить, что для двигателей всех типоразмеров, во всем диапазоне скольжений 4-ая и 7-ая периодические составляющие характеризуются максимальными постоянными времени затухания Т4, Т7 (см. табл. 3.1) и, следовательно, определяют длительность затухания переходного электромагнитного момента в целом.
Таблица 3.1
Параметры составляющих переходного момента при включении асинхронных двигателей серии 4А с нулевыми НЭМУ и постоянным скольжением s = sн
| Составляющая момента | Характеризующие параметры | Типоразмер асинхронного двигателя | ||||
| № | Вид составляющей | 4А80B4, 1,5 кВт | 4А100L4, 4,0 кВт | 4А132М4, 11 кВт | 4А355S4, 250 кВт | |
| М1 | Постоянная | А1 = Муст | 1,000 | 1,000 | 1,000 | 1,000 |
| М2 | Экспонен. | А2, о.е. | -8,369 | -2,620 | -1,285 | -0,356 |
| Т2, с | 6,6710-3 | 6,7110-3 | 10,710-3 | 26,710-3 | ||
| М3 | Экспонен. | А3, о.е. | -3,184 | -2,171 | -1,029 | -0,381 |
| Т3, с | 2,1410-3 | 4,9110-3 | 7,7110-3 | 26,610-3 | ||
| М4 | Косинусная | А4(max), о.е. | 4,185 | -0,542 | -0,743 | -1,023 |
| Т4, с | 13,3310-3 | 17,4110-3 | 21,4310-3 | 53,4710-3 | ||
| W4, с-1 | 85,65 | 39,77 | 18,37 | 4,23 | ||
| М5 | Косинусная | А5(max), о.е. | -6,185 | -1,458 | -1,257 | -0,976 |
| Т5, с | 4,2810-3 | 10,4310-3 | 15,4110-3 | 53,0210-3 | ||
| W5, с-1 | 246,56 | 288,69 | 304,42 | 312,91 | ||
| М6 | Косинусная | А6(max) , о.е. | 12,553 | 5,723 | 3,314 | 1,731 |
| Т6, с | 3,2410-3 | 5,6710-3 | 8,9610-3 | 26,6210-3 | ||
| W6, с-1 | -160,91 | -248,91 | -286,04 | -308,69 | ||
| М7 | Синусная | А7(max) , о.е. | -5,091 | -6,923 | -6,158 | -5,844 |
| Т7, с | 13,3310-3 | 17,4110-3 | 21,4310-3 | 53,4710-3 | ||
| W7, с-1 | 85,65 | 39,77 | 18,37 | 4,23 | ||
| М8 | Синусная | А8(max) , о.е. | 5,091 | 6,923 | 6,158 | 5,844 |
| Т8, с | 4,2810-3 | 10,4310-3 | 15,4110-3 | 53,0210-3 | ||
| W8, с-1 | 246,56 | 288,69 | 304,42 | 312,91 | ||
| М9 | Синусная | А9(max) , о.е. | 5,091 | 6,923 | 6,158 | 4,844 |
| Т9, с | 3,2410-3 | 5,6710-3 | 8,9610-3 | 26,6210-3 | ||
| W9, с-1 | -160,91 | -248,91 | -286,04 | -308,69 | ||
| Параметры Г-образной схемы замещения (в относительных единицах) | X0 | 1,9 | 2,4 | 3,2 | 4,6 | |
| R1 | 0,120 | 0,067 | 0,043 | 0,013 | ||
| X1 | 0,078 | 0,079 | 0,085 | 0,090 | ||
| R2 | 0,069 | 0,053 | 0,032 | 0,013 | ||
| X2 | 0,120 | 0,140 | 0,130 | 0,130 | ||
Частоты свободных колебаний периодических составляющих момента, также определяются сложной функцией параметров асинхронной машины. Физический смысл отрицательных частот свободных колебаний для 6-х и 9-х составляющих состоит в изменении направления вращения этих составляющих электромагнитного момента. Это выражается в том, что прямо и обратно вращающиеся периодические составляющие находятся в противофазе, например М8 и М9, изображенные на рис.3.4,б.
Представляет интерес также исследование зависимостей значений базовых частот и коэффициентов затухания (постоянных времени) от скольжения АД. На рис. 3.5 приведены зависимости значений коэффициентов затухания и базовых частот переходных моментов от скольжений для нескольких АД. На основании этих зависимостей можно утверждать, что условие a1 a2, выполняется для всех рассматриваемых АД. Поэтому, именно первый коэффициент затухания a1 определяет длительность электромагнитного переходного процесса во всем диапазоне скольжений. С другой стороны, с увеличением мощности АД, при скольжениях, меньших определенного значения характерного для данного типа двигателя, (например, для 4А355S4 при скольжениях меньших s 0,873), коэффициенты затухания a1 и a2 равны. В этом случае составляющие М4, М5, М7, М8 имеют одинаковые постоянные времени затухания, которые и определяют длительность электромагнитного переходного процесса. Для всех типов двигателей базовые частоты w1 и w2, при скольжении равном единице, равны максимальному значению. При уменьшении скольжения до некоторого, характерного данному двигателю значения, наблюдается уменьшение обеих базовых частот. Однако, при дальнейшем уменьшении скольжения частота w1 продолжает уменьшаться, тогда, как w2 вновь возрастает.
Переход от временных зависимостей (3.7) – (3.15) к передаточной функции звена, описывающего электромагнитную часть АД, возможен при помощи преобразования Лапласа [47]
![]() (3.20)
(3.20)
где ![]() – изображение переходной функции звена как суммы каждой из составляющих (3.7) – (3.15).
– изображение переходной функции звена как суммы каждой из составляющих (3.7) – (3.15).
Например, переход от временной зависимости составляющей М4 (затухающей косинусоиды) имеет вид

 (3.21)
(3.21)
Передаточная функция звена, описывающая электромагнитную часть АД, с учетом всех девяти составляющих

![]()

где Аi, Тi, Wi – начальные значения амплитуд, постоянных времени затухания и угловых частот свободных колебаний составляющих переходного момента.
Передаточная функция разомкнутой системы электропривода ТПН-АД без учета внутренней обратной связи в имеет вид
 (3.23)
(3.23)
Передаточная функция системы с учетом внутренней положительной обратной связи по углу j
 (3.24)
(3.24)
После преобразований (3.24) получим характеристическое уравнение разомкнутой системы электропривода ТПН-АД, которое имеет вид
![]()
![]() (3.25)
(3.25)
где а0 - а13 – коэффициенты уравнения, представляющие собой алгебраические выражения, приведенные в приложении А.
Анализ устойчивости основывается на использовании алгебраического критерия Гурвица c применением средств ЭВМ [2, 46, 77]. Фрагменты расчетной программы приведены в приложении А. Результаты исследования иллюстрирует рис.3.8 (а, в, д, ж), где представлены семейства механических характеристик для асинхронных двигателей серии 4А: 4А80B4, 4А100L4, 4А132М4, 4А355S4, с обозначением областей неустойчивой работы, построенных на основании изложенной расчетной методики (JS = Jдв, нулевые НЭМУ). Также, на рис.3.8 (б, г, е, з) приведены характеристики, рассчитанные при помощи модели электропривода ТПН-АД с СН. Осуществлялся пуск АД с заданным моментом нагрузки и углом управления ТПН, и при достижении установившегося режима работы выявлялось наличие или отсутствие автоколебаний скорости АД в каждой из точек характеристики. В разомкнутой системе ЭП ТПН-АД с СТ колебания отсутствуют для всех исследуемых АД, что подтверждает предыдущие исследования [9].
3. Оценка влияния на устойчивость параметров ЭП
Как показывают результаты исследований, у асинхронных двигателей, работающих в составе разомкнутой системы ЭП ТПН-АД с СН от параметров ЭП зависит не только характер колебаний, но и само их наличие. Это определяет основную задачу - на основании расчетной методики и результатов моделирования оценить динамические свойства АД и влияние параметров асинхронных двигателей на устойчивость электропривода ТПН-АД.
Рассмотрим семейство четырехполюсных электродвигателей серии 4А обычного исполнения мощностью 0,25…250 кВт. Известно, что при увеличении суммарного момента инерции системы область устойчивой работы увеличивается и наоборот. Для двигателя 4А355S4, 250 кВт не удалось выявить ни одной точки где существуют автоколебания, что показано на рис. 3.8,з. С уменьшением мощностей асинхронных двигателей, и как следствие моментов инерции, появляется и увеличивается зона неустойчивой работы (см. рис.3.8,е и 3.8,г). Это наблюдается для электродвигателей мощностью 1,5кВт (рис.3.8,б) и более. Вместе с тем, при рассмотрении ЭП с электродвигателями мощностью менее 1,5 кВт наблюдается обратная картина – зона неустойчивой работы уменьшается с уменьшением мощностей АД (см. рис.3.10,а и 3.10,б ), а для электродвигателя 4АА63А4, 0,25 кВт она вовсе отсутствует [28].
Это явление может быть объяснено тем, что в действительности, устойчивость системы определяется не абсолютным значением суммарного момента инерции ЭП, а влиянием его относительной величины на характер переходного процесса АД. Это влияние может быть выражено отношением электромеханической постоянной времени Тм к электромагнитной постоянной времени четвертой переходной составляющей электромагнитного момента - Т4 (3.10), (3.16 - 3.19). При линеаризации механической характеристики в области 0 s sн
 (3.26)
(3.26)
где JS – суммарный приведенный момент инерции, кгм2.
 |
4. Алгоритм модели электропривода ТПН-АД
5. Методы решения дифференциальных уравнений ЭП
Математическая модель ЭП представляет собой систему алгебраических, дифференциальных и логических уравнений. Как правило, система содержит уравнения преимущественно первого порядка. К ним можно отнести уравнение Даламбера, выражение электромагнитного момента. Решение дифференциальных уравнений предусматривает применение численных методов, основанных на разложении в ряд Тейлора.
Одношаговые методы, к которым относятся методы Рунге-Кутта, предусматривают определение значения искомой функции на основании решения, найденного для одного предыдущего шага, а для первого шага – на основании начальных условий. Наиболее предпочтительным для решения текущих задач является метод Рунге-Кутта четвертого порядка, предполагающий разложение и учет пяти членов ряда Тейлора. В сравнении с методами более низкого порядка, при одинаковом шаге интегрирования - h, метод Рунге-Кутта четвертого порядка обеспечивает наибольшую точность вычисления. Он наиболее часто используется и рекомендуется многими исследователями.
Расчетное рекуррентное выражение по методу Рунге-Кутта четвертого порядка имеет вид
![]() (2.43)
(2.43)
где
 (2.44)
(2.44)
Шаг интегрирования h устанавливается для каждой решаемой задачи индивидуально, но не должен составлять более 1/10 постоянной времени элемента ЭП, характеризующегося наименьшей инерционностью. При применении быстродействующих программных и аппаратных средств вычислительной техники для повышения точности расчетов, следует уменьшать шаг интегрирования до значений, соответствующих 1000 и более расчетных точек за период напряжения источника питания.
Выводы
Усовершенствована методика исследования устойчивости разомкнутой системы электропривода ТПН-АД, сочетающая аналитические способы исследования с численными методами. Методика является универсальной, учитывает нелинейности АД и может применяться для широкого ряда двигателей.
Получена передаточная функция электромагнитной части асинхронного двигателя, которая характеризует переходную функцию при учете всех девяти составляющих электромагнитного момента двигателя.
Выполнено исследование динамических свойств асинхронных двигателей в разомкнутой системе электропривода ТПН-АД с СН. Вид, характер и само наличие неустойчивых режимов работы АД полностью зависит от параметров электропривода и начальных электромагнитных условий, что было проиллюстрировано на характерных примерах.
В области рабочих скольжений неустойчивым режимам работы наиболее подвержены ЭП с асинхронными двигателями средней мощности. В каждом семействе асинхронных двигателей серии 4А существует «граничный» АД с которым электропривод обладает максимальной зоной неустойчивой работы, тогда как при использовании двигателей большей или меньшей мощности, зона неустойчивой работы уменьшается.