Изучение устройства и принципа действия системы автоматического невелирования асфальтоу
СОДЕРЖАНИЕ: Лабораторная работа № 3 Изучение устройства и принципа действия системы автоматического невелирования асфальтоукладчика Цель работы: изучить устройство и принцип действия системы автоматического невелирования асфальтоукладчикаЛабораторная работа № 3
Изучение устройства и принципа действия системы автоматического невелирования асфальтоукладчика
Цель работы: изучить устройство и принцип действия системы автоматического невелирования асфальтоукладчика
Для обеспечения ровности и поперечного уклона асфальтобетонного покрытия на асфальтоукладчиках применяется автоматическая система «Стабилослой-20» (рис. 3.1), работающая от двух или одного копира, в качестве которых может быть использована натянутая вдоль полотна дороги проволока, трос или лыжа, скользящая по уже уложенному покрытию или основанию.
При работе системы от двух копиров с обеих сторон рамы рабочих органов устанавливаются два датчика ДЩБ 6. В этом случае задание угла наклона рамы в поперечном направлении осуществляется за счет разницы положения по высоте одной стороны рамы относительно другой.
Этот способ применяется при работе широкозахватных асфальтоукладчиков с шириной укладки 9—12 м, когда датчик ДКБ не может обеспечить заданной точности.
При работе системы от одного копира датчик ДЩБ устанавливается по одну сторону рамы, а выдерживание заданного угла наклона обеспечивает датчик ДКБ, устанавливаемый на середине поперечной балки укладчика.
Щуп 5 датчика ДЩБ, скользящий по копиру 4, поворачивается на угол соответственно тому, поднимается или опускается асфальтоукладчик при своем движении относительно копира при наезде на неровности основания. Если отклонение щупа датчика превышает его зону нечувствительности, то датчик вырабатывает электрический сигнал, который поступает в блок управления 2, а затем на электромагниты распределителя 8, включающие гидроцилиндры 7 привода рамы 3 рабочих органов. Гидроцилиндры перемещают раму в сторону уменьшения электрического сигнала.
Если рама рабочих органов изменит свое положение в поперечном направлении при работе системы от двух копиров, сигнал вырабатывается вторым датчиком ДЩБ и соответствующий гидроцилиндр перемещает по вертикали край рамы, восстанавливая угол наклона.
При работе системы от одного копира при изменении угла наклона сигнал вырабатывается датчиком ДКБ 1 и подается на золотник гидроцилиндра.
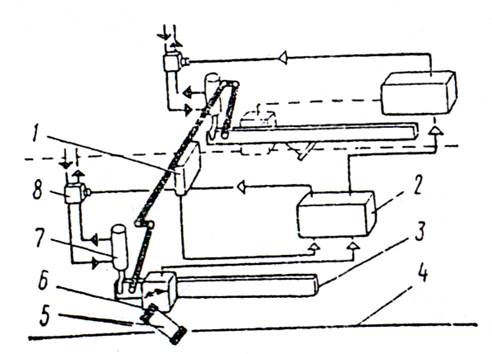
Рисунок- 3.1. Схема расположения аппаратуры системы «Стабилослой-20» на асфальтоукладчике:
1—датчик углового положения рамы рабочих органов; 2 — блок управления; 3— рама рабочих органов; 4--копир; 5 — щуп;
б — датчик щуповой; 7 — гидроцилиндр рамы рабочих органов;
8 — электрогидрораспределитель.