Классификация математических моделей, используемых в экономике и менеджменте
СОДЕРЖАНИЕ: Изучение экономических приложений математических дисциплин для решения экономических задач: использование математических моделей в экономике и менеджменте. Примеры моделей линейного и динамического программирования как инструмента моделирования экономики.Курсовая работа
Классификация математических моделей, используемых в экономике и менеджменте
Содержание
Введение
1. Математические модели в экономике и менеджменте
1.1 Классификация экономико-математических моделей
2. Оптимизационное моделирование
2.1 Линейное программирование
2.1.1 Линейное программирование как инструмент математического моделирования экономики
2.1.2 Примеры моделей линейного программирования
2.2 Динамическое программирование
2.2.1 Модель динамического программирования
2.2.2 Принцип оптимальности и уравнение Беллмана
2.2.3 Общее описание процесса моделирования и построения вычислительной схемы динамического программирования
2.2.4 Оптимальное распределение ресурсов
2.2.5 Оптимальное управление запасами
2.2.6 Задача о замене
Заключение
Введение
Современная математика характеризуется интенсивным проникновением в другие науки, во многом этот процесс происходит благодаря разделению математики на ряд самостоятельных областей. Математика стала для многих отраслей знаний не только орудием количественного расчёта, но также методом точного исследования и средством предельно чёткой формулировки понятий и проблем. Без современной математики с её развитым логическим и вычислительным аппаратом был бы не возможен прогресс в различных областях человеческой деятельности.
Экономика как наука об объективных причинах функционирования и развития общества пользуется разнообразными количественными характеристиками, а поэтому вобрала в себя большое число математических методов.
Актуальность данной темы состоит в том, что в современной экономике используются оптимизационные методы, которые составляют основу математического программирования, теории игр, сетевого планирования, теории массового обслуживания и других прикладных наук.
Изучение экономических приложений математических дисциплин, составляющих основу актуальной экономической математики, позволяет приобрести некоторые навыки решения экономических задач и расширить знания в этой области.
Целью данной работы является изучение некоторых оптимизационных методов, применяемых при решении экономической задач.
1. Математические модели в экономике и менеджменте
Математические модели в экономике. Широкое использование математических моделей является важным направлением совершенствования экономического анализа. Конкретизация данных или представление их в виде математической модели помогает выбрать наименее трудоёмкий путь решения, повышает эффективность анализа.
Все экономические задачи, решаемые с применением линейного программирования отличаются альтернативностью решения и определенными ограничивающими условиями. Решить такую задачу - значит выбрать из всех допустимо возможных (альтернативных) вариантов лучший, оптимальный. Важность и ценность использования в экономике метода линейного программирования состоят в том, что оптимальный вариант выбирается из достаточно значительного количества альтернативных вариантов.
Самыми существенными моментами при постановке и решении экономических задачах в виде математической модели являются:
· адекватность экономико-математической модели действительности;
· анализ закономерностей, соответствующих данному процессу;
· определение методов, с помощью которых можно решить задачу;
· анализ полученных результатов или подведение итога.
Под экономическим анализом понимается прежде всего факторный анализ.
Пусть y=f(xi ) - некоторая функция, характеризующая изменение показателя или процесса; x1 ,x2 ,…,xn - факторы, от которых зависит функция y=f(xi ). Задана функциональная детерминированная связь показателя y с набором факторов . Пусть показатель y изменился за анализируемый период. Требуется определить, какой частью численное приращение функции y=f(x1 ,x2 ,…,xn ) обязано приращению каждого фактора.
Можно выделить в экономическом анализе - анализ влияния производительности труда и численности работающих на объем произведенной продукции; анализ влияния величины прибыли основных производственных фондов и нормируемых оборотных средств на уровень рентабельности; анализ влияния заемных средств на маневренность и независимость предприятия и т. п..
В экономическом анализе, кроме задач, сводящихся к разбиению его на составляющие части, существует группа задач, где требуется функционально увязать ряд экономических характеристик, т.е. построить функцию, содержащую в себе основное качество всех рассматриваемых экономических показателей.
В этом случае ставится обратная задача- так называемая задача обратного факторного анализа.
Пусть имеется набор показателей x1 ,x2 ,…,xn , характеризующих некоторый экономический процесс F. Каждый из показателей характеризует этот процесс. Требуется построить функцию f(xi ) изменения процесса F, содержащую основные характеристики всех показателей x1 ,x2 ,…,xn
Главный момент в экономическом анализе - определение критерия, по которому будут сравниваться различные варианты решения.
Математические модели в менеджменте. Во всех сферах человеческой деятельности большую роль играет принятие решений. Для постановки задачи принятия решения необходимо выполнить два условия:
· наличие выбора;
· выбор варианта по определенному принципу.
Известны два принципа выбора решения: волевой и критериальный.
Волевой выбор, наиболее часто используемый, применяют при отсутствии формализованных моделей как единственно возможный.
Критериальный выбор заключается в принятии некоторого критерия и сравнении возможных вариантов по этому критерию, Вариант, для которого принятый критерий принимает наилучшее решение, называют оптимальным, а задачу принятия наилучшего решения – задачей оптимизации.
Критерий оптимизации называют целевой функцией.
Любую задачу, решение которой сводится к нахождению максимума или минимума целевой функции, называют экстремальной задачей.
Задачи менеджмента связаны с нахождением условного экстремума целевой функции при известных ограничениях, накладываемых на ее переменные.
В качестве целевой функции при решении различных оптимизационных задач принимают количество или стоимость выпускаемой продукции, затрат на производство, сумму прибыли и т.п. Ограничения обычно касаются людских материальных, денежных ресурсов.
Оптимизационные задачи менеджмента, различные по своему содержанию и реализуемые с использованием стандартных программных продуктов, соответствуют тому или иному классу экономико-математических моделей.
Рассмотрим классификацию некоторых основных задач оптимизации, реализуемых менеджментом на производстве.
Классификация задач оптимизации по функции управления:
| Функция управления | Задачи оптимизации | Класс экономико-математических моделей |
| Техническая и организационная подготовка производства | Моделирование состава изделий; Оптимизация состава марок, шихты, смесей; Оптимизация раскроя листового материала, проката; Оптимизация распределения ресурсов в сетевых моделях комплексов работ; Оптимизация планировок предприятий, производств и оборудования; Оптимизация маршрута изготовления изделий; Оптимизация технологий и технологических режимов. |
Теория графов Целочисленное программирование Дискретное программирование Линейное программирование Сетевое планирование и управление Имитационное моделирование Динамическое программирование Нелинейное программирование |
| Технико-экономическое планирование | Построение сводного плана и прогнозирование показателей развития предприятия; Оптимизация портфеля заказов и производственной программы; Оптимизация распределения производственной программы по плановым периодам. |
Матричные балансовые модели “Затраты-выпуск” Корреляционно- регрессионный анализ Экстраполяция тенденций Линейное программирование |
| Оперативное управление основным производством | Оптимизация календарно-плановых нормативов; Календарные задачи; Оптимизация стандарт-планов; Оптимизация краткосрочных планов производств. |
Нелинейное программирование Имитационное моделирование Линейное программирование Целочисленное программирование |
Сочетание различных элементов модели приводит к различным классам задач оптимизации:
| Исходные данные | Переменные | Зависимости | Задача |
| Детерминированные | Непрерывные | Линейные | Линейного программирования |
| Целочисленные | Линейные | Целочисленного программирования | |
| Непрерывные, целочисленные | Нелинейные | Нелинейного программирования | |
| Случайные | Непрерывные | Линейные | Стохастического программирования |
1.1Классификация экономико-математических моделей
Существует значительное разнообразие видов, типов экономико-математических моделей, необходимых для использования в управлении экономическими объектами и процессами. Экономико-математические модели подразделяются на макроэкономические и микроэкономические в зависимости от уровня моделируемого объекта управления, динамические, которые характеризуют изменения объекта управления во времени, и статические, которые описывают взаимосвязи между разными параметрами, показателями объекта именно в то время. Дискретные модели отображают состояние объекта управления в отдельные, фиксированные моменты времени. Имитационными называют экономико-математические модели, используемые с целью имитации управляемых экономических объектов и процессов с применением средств информационной и вычислительной техники. По типу математического аппарата, применяемого в моделях, выделяются экономико-статистические, модели линейного и нелинейного программирования, матричные модели, сетевые модели.
Факторные модели. В группу экономико-математических факторных моделей входят модели, которые с одной стороны включают экономические факторы, от которых зависит состояние управляемого экономического объекта, а с другой – зависимые от этих факторов параметры состояния объекта. Если факторы известны, то модель позволяет определить искомые параметры. Факторные модели чаще всего предоставлены простыми в математическом отношении линейными или статическими функциями, которые характеризуют связь между факторами и зависимыми от них параметрами экономического объекта.
Балансовые модели. Балансовые модели как статистические, так и динамические широко применяются в экономико-математическом моделировании. В основе создания этих моделей лежит балансовый метод – метод взаимного сопоставления материальных, трудовых и финансовых ресурсов и потребностей в них. Описывая экономическую систему в целом, под её балансовой моделью понимают систему уравнений, каждое из которых выражает потребность баланса между изготовленными отдельными экономическими объектами количества продукции и совокупной потребностью в этой продукции. При таком подходе экономическая система состоит из экономических объектов, каждый из которых выпускает некоторый продукт. Если вместо понятия «продукт» ввести понятие «ресурс», то под балансовой моделью необходимо понимать систему уравнений, которые удовлетворяют требования между определенным ресурсом и его использованием.
Наиболее важные виды балансовых моделей:
· Материальные, трудовые и финансовые балансы для экономики в целом и отдельных ее отраслей;
· Межотраслевые балансы;
· Матричные балансы предприятий и фирм.
Оптимизационные модели. Большой класс экономико-математических моделей образуют оптимизационные модели, которые позволяют выбрать из всех решений наилучший оптимальный вариант. В математическом содержании оптимальность понимается как достижение экстремума критерия оптимальности, называемой также целевой функцией. Оптимизационные модели чаще всего используются в задачах нахождения лучшего способа использования экономических ресурсов, что позволяет достичь максимального целевого эффекта. Математическое программирование образовалось на основе решения задачи про оптимальный раскрой листов фанеры, что обеспечивает наиболее полное использование материала. Поставив такую задачу, известный российский математик и экономист академик Л.В.Канторович был признан достойным Нобелевской премии в экономике.
2. Оптимизационное моделирование
2.1 Линейное программирование
2.1.1 Линейное программирование как инструмент математического моделирования экономики
Исследование свойств общей системы линейных неравенств ведется с XIX в., а первая оптимизационная задача с линейной целевой функцией и линейными ограничениями была сформулирована в З0-е годы XX в. Одним из первых зарубежных ученых, заложивших основы линейного программирования, является Джон фон Нейман, широко известный математик и физик, доказавший основную теорему о матричных играх. Среди отечественных ученых большой вклад в теорию линейной оптимизации внесли лауреат Нобелевской премии Л.В. Канторович, Н.Н. Моисеев, Е.Г. Гольштейн, Д.Б. Юдин и многие другие.
Линейное программирование традиционно считается одним из разделов исследования операций, который изучает методы нахождения условного экстремума функций многих переменных.
В классическом математическом анализе исследуется общая постановка задачи определения условного экстремума, однако в связи с развитием промышленного производства, транспорта, агропромышленного комплекса, банковского сектора традиционных результатов математического анализа оказалось недостаточно. Потребности практики и развитие вычислительной техники привели к необходимости определения оптимальных решений при анализе сложных экономических систем. Главным инструментом для решения таких задач является математическое моделирование, т.е. формализованное описание изучаемого процесса и исследование его с помощью математического аппарата.
Искусство математического моделирования состоит в том, чтобы учесть как можно более широкий спектр факторов, влияющих на поведение объекта, используя при этом по возможности несложные соотношения. Именно в связи с этим процесс моделирования часто носит многоэтапный характер. Сначала строится относительно простая модель, затем проводится ее исследование, позволяющее понять, какие из интегрирующих свойств объекта не улавливаются данной формальной схемой, после чего за счет усложнения модели обеспечивается большая ее адекватность реальности. При этом во многих случаях первым приближением к действительности является модель, в которой все зависимости между переменными, характеризующими состояние объекта, являются линейными. Практика показывает, что значительное количество экономических процессов достаточно полно описывается линейными моделями, а следовательно, линейное программирование как аппарат, позволяющий отыскивать условный экстремум на множестве, заданном линейными уравнениями и неравенствами, играет важную роль при анализе этих процессов.
2.1.2 Примеры моделей линейного программирования
Ниже будут рассмотрены несколько ситуаций, исследование которых возможно с применением средств линейного программирования. Так как основным показателем в этих ситуациях является экономический— стоимость, то соответствующие модели являются экономико-математическими.
Задача о раскрое материалов. На обработку поступает материал одного образца в количестве d единиц. Требуется изготовить из него к разных комплектующих изделий в количествах, пропорциональных числам а1 ,..., ак . Каждая единица материала может быть раскроена n различными способами, при этом использование i-го способа (i=1,…,n) дает bij, единиц j-го изделия (j = 1,...,k).
Требуется найти план раскроя, обеспечивающий максимальное число комплектов.
Экономико-математическая модель этой задачи может быть сформулирована следующим образом. Обозначим xi — число единиц материалов, раскраиваемых i-м способом, и x — число изготавливаемых комплектов изделий.
Учитывая, что общее количество материала равно сумме его единиц, раскраиваемых различными способами, получим:
![]() (1)
(1)
Условие комплектности выразится уравнениями:
![]() (j=1,…,k)(2)
(j=1,…,k)(2)
Очевидно, что
xi
![]() 0 (i=1,…,n)(3)
0 (i=1,…,n)(3)
Целью является определить такое решение Х= (x1 ,…,xn ), удовлетворяющее ограничениям (1)-(3), при котором функция F = x принимает максимальное значение. Проиллюстрируем рассмотренную задачу следующим примером Для изготовления брусьев длиной 1,5 м, 3 м и 5 м в соотношении 2:1:3 на распил поступают 200 бревен длиной 6 м. Определить план распила, обеспечивающий максимальное число комплектов. Чтобы сформулировать соответствующую оптимизационную задачу линейного программирования, определим все возможные способы распила бревен, указав соответствующее число получаемых при этом брусьев (табл. 1).
Таблица 1
| Способ распила i | Число получаемых брусьев различной длины | ||
| 1,5 | 3,0 | 5,0 | |
| 1 | 4 | - | - |
| 2 | 2 | 1 | - |
| 3 | - | 2 | - |
| 4 | - | - | 1 |
Обозначим через xi — число бревен, распиленных i-м способом (i = 1.2, 3, 4); х —число комплектов брусьев.
С учетом того, что все бревна должны быть распилены, а число брусьев каждого размера должно удовлетворять условию комплектности, оптимизационная экономико-математическая модель примет следующий вид
х max
при ограничениях:
x1 +x2 +x3 +x4 =200
4x1 +2x2 =2x
x2 +2x3 =x
x4 =2x
xi
![]() 0 (i=1,2,3,4)
0 (i=1,2,3,4)
Задача выбора оптимальной производственной программы предприятия. Пусть предприятие может выпускать n различных видов продукции. Для выпуска этих видов продукции предприятие использует М видов материально-сырьевых ресурсов и N видов оборудования. Необходимо определить объемы производства предприятия (т.е. его производственную программу) на заданном интервале планирования [0, Т], чтобы максимизировать валовую прибыль предприятия.
Далее будем полагать, что валовая прибыль есть выручка, полученная от реализации продукции за вычетом условно-постоянных и переменных затрат. Иными словами, необходимо максимизировать целевую функцию вида:
![]() (4)
(4)
где ai — цена реализации продукции вида i;
bi — переменные затраты на выпуск одной единицы продукции вида i;
Zp — условно постоянные затраты, которые будем предполагать независимыми от вектора х = (x1 ,..., xn ).
При этом должны быть выполнены ограничения на объемы используемых материально-сырьевых ресурсов и время использования оборудования на интервале [0,T].
Обозначим через Lj(j = l,...,M) объем запасов материально-сырьевых ресурсов вида j, а через k (k = 1,..., N) — время, в течение которого может быть использовано оборудование вида k. Известно потребление материально-сырьевых ресурсов вида j на выпуск одной единицы продукции вида i, которое обозначим через lij (i = 1,..., n; j = 1,...,М). Известно также tik — время загрузки одной единицы оборудования вида k изготовления одной единицы продукции вида i (i = 1,..., n; k = 1,..., N). Через mk обозначим количество единиц оборудования вида k (k=l,...,N).
При введенных обозначениях ограничения на объем потребляемых материально-сырьевых ресурсов могут быть заданы таким образом:
![]() (j=1,…,M)(5)
(j=1,…,M)(5)
Ограничения на производственные мощности задаются следующими неравенствами
![]() k=1,…,N(6)
k=1,…,N(6)
Кроме того, переменные
xi 0 i=1,…,n (7)
Таким образом, задача выбора производственной программы, максимизирующей прибыль, заключается в выборе такого плана выпуск х = (х1 ...,хn ), который удовлетворял бы ограничениям (5)-(7) и максимизировал бы функцию (4).
В некоторых случаях предприятие должно поставить заранее оговоренные объемы продукции Vt другим хозяйствующим субъектам и тогда в рассматриваемой модели вместо ограничения (1.7) может быть включено ограничение вида:
xt Vt i= 1, ...,n.
Задача о диете. Рассмотрим задачу составления душевого рациона питания минимальной стоимости, которое бы содержало определенные питательные вещества в необходимых объемах. Будем предполагать, что имеется известный перечень продуктов из n наименований (хлеб, сахар, масло, молоко, мясо и т.д.), которые мы будем обозначать буквами F1
,...,Fn
. Кроме того, рассматриваются такие характеристики продуктов (питательные вещества), как белки, жиры, витамины, минеральные вещества и другие. Обозначим эти компоненты буквами N1
,...,Nm
. Предположим, что для каждого продукта Fi
известно (i = 1,...,n) количественное содержание в одной единице продукта указанных выше компонент. В этом случае можно составить таблицу, содержащую характеристику продуктов:
F1 ,F2 ,…Fj …Fn
_____________
N1 a11 a12 …a1j …a1N
N2 a21 a22 …a2j …a2N
Ni ai1 ai2 …aij …aiN
Nm am1 am2 …amj …amN
Элементы этой таблицы образуют матрицу, имеющую m строк и n столбцов. Обозначим ее через A и назовем матрицей питательности. Предположим, что мы составили рацион х = (х1 ,x2 ,...,хn ) на некоторый период (например, месяц). Иными словами, мы планируем каждому человеку на месяц х, единиц (килограммов) продукта F1 ,x2 единиц продукта F2 и т.д. Нетрудно вычислить, какое количество витаминов, жиров, белков и прочих питательных веществ получит человек за этот период. Например, компонента N1 присутствует в этом рационе в количестве
a11 x1 + a12 x2+…+ a1n xn
поскольку согласно условию в x1 единицах продукта F1 согласно матрице питательности содержится a11 x1 единиц компоненты N1 ; к этому количеству добавляется порция а12 x2 вещества N1 из х2 единиц продукта F2 и т.д. Аналогично можно определить и количество всех остальных веществ Ni в составляемом рационе (х1 ,..., хn ).
Допустим, что имеются определенные физиологические требования, касающиеся необходимого количества питательных веществ в Ni
(i/ = 1,..., N) в планируемый срок. Пусть эти требования заданы вектором b = (b1
...,bn
), i-я компонента которого bi
указывает минимально необходимое содержание компонента Ni
в рационе. Это означает, что коэффициенты xi
вектора х должны удовлетворять следующей системе ограничений:
a11 x1 + a12 x2+…+ a1n xn b1
a21 x1 + a22 x2+…+ a2n xn b2 (8)
am1 x1 + am2 x2+…+ amn xn bm
Кроме того, из содержательного смысла задачи очевидно, что все переменные х1 ,...,хn неотрицательны и поэтому к ограничениям (8) добавляются еще неравенства
x1 0; x2 0;… xn 0; (9)
Учитывая, что в большинстве случаев ограничениям (8) и (9) удовлетворяет бесконечно много рационов, выберем тот из них, стоимость которого минимальна.
Пусть цены на продукты F1 ,...,Fn равны соответственно с1 ,…,cn
Следовательно, стоимость всего рациона х = (х1 ..., хn ) может быть записана в виде
c1 x1 + c2 x2 +…+ cn xn min (10)
Окончательно формулировка задачи о диете заключается в том, чтобы среди всех векторов х = (x1 ,...,хn ) удовлетворяющих ограничениям (8) и (9) выбрать такой, для которого целевая функция (10) принимает минимальное значение.
Транспортная задача. Имеется m пунктов S1 ,..., Sm производства однородного продукта (угля, цемента, нефти и т.п.), при этом объем производства в пункте Si равен ai единиц. Произведенный продукт потребляется в пунктах Q1 ...Qn и потребность в нем в пункте Qj составляет kj единиц (j = 1,...,n). Требуется составить план перевозок из пунктов Si (i = 1,...,m) в пункты Qj (j = 1,..., n), чтобы удовлетворить потребности в продукте bj , минимизировав транспортные расходы.
Пусть стоимость перевозок одной единицы продукта из пункта Si в пункт Qi равна cij . Будем далее предполагать, что при перевозке хij единиц продукта из Si в Qj транспортные расходы равны cij xij.
Назовем планом перевозок набор чисел хij ci = 1,..., m; j = 1,..., n, удовлетворяющий ограничениям:
![]()
xij 0, i=1,2,…,m; j=1,…,n (11)
Содержательный смысл уравнений (11) состоит в том, что из пункта Si
при плане хij
вывозится во все пункты Qj
объем ![]() , который должен быть равен запасу ai
. В пункт Qj
поступает из всех пунктов Si
суммарное количество
, который должен быть равен запасу ai
. В пункт Qj
поступает из всех пунктов Si
суммарное количество ![]() продукта, которое в точности должно быть равно потребности bj
.
продукта, которое в точности должно быть равно потребности bj
.
При плане перевозок (хij ) транспортные расходы составят величину
 (12)
(12)
Окончательное формирование транспортной задачи таково: среди всех наборов чисел (хij ), удовлетворяющих ограничениям (11), найти набор, минимизирующий (12).
2.2 Динамическое программирование
2.2.1 Модель динамического программирования
Динамическое программирование – метод оптимизации, приспособленный к операциям, в которых процесс принятия решений может быть разбит на отдельные этапы (шаги). Такие операции называют многошаговыми.
В основе метода динамического программирования лежит принцип оптимальности, сформулированный Беллманом. Этот принцип и идея включения конкретной задачи оптимизации в семейство аналогичных многошаговых задач приводят к рекуррентным соотношениям – функциональным уравнениям – относительно оптимального значения целевой функции. Их решение позволяет последовательно получить оптимальное управление для исходной задачи оптимизации.

Дадим общее описание модели динамического программирования.
Рассматривается управляемая система, которая под влиянием управления переходит из начального состояния ![]() в конечное состояние
в конечное состояние ![]() . Предположим, что процесс управления системой можно разбить на n шагов. Пусть
. Предположим, что процесс управления системой можно разбить на n шагов. Пусть![]() ,
,![]() ,…,
,…,![]() - состояния системы после первого, второго,…, n-го шага. Схематически это показано на рис. 1.
- состояния системы после первого, второго,…, n-го шага. Схематически это показано на рис. 1.
Состояние ![]() системы после k-го шага (k=1,2,…,n) характеризуется параметрами
системы после k-го шага (k=1,2,…,n) характеризуется параметрами ![]() , которые называют фазовыми координатами. Состояние
, которые называют фазовыми координатами. Состояние ![]() можно изобразить точкой s-мерного пространства, называемого фазовым пространством. Последовательное преобразование системы (по шагам) достигается с помощью некоторых мероприятий
можно изобразить точкой s-мерного пространства, называемого фазовым пространством. Последовательное преобразование системы (по шагам) достигается с помощью некоторых мероприятий ![]() , которые составляют управление системой U=
, которые составляют управление системой U=![]() ,
,
где ![]() - управление на k-м шаге, переводящее систему из состояния
- управление на k-м шаге, переводящее систему из состояния ![]() в состояние
в состояние ![]() (рис.1). Управление
(рис.1). Управление ![]() на k-м шаге заключается в выборе значений определенных управляющих переменных
на k-м шаге заключается в выборе значений определенных управляющих переменных ![]() .
.
Предполагаем впредь, что состояние системы в конце k-го шага зависит только от предшествующего состояния системы ![]() и управления
и управления ![]() на данном шаге (рис.1). Такое свойство получило название отсутствия последствия. Обозначим эту зависимость в виде
на данном шаге (рис.1). Такое свойство получило название отсутствия последствия. Обозначим эту зависимость в виде
![]() (1.1)
(1.1)
Равенства (1.1) получили название уравнений состояний. Функции ![]() полагаем заданными.
полагаем заданными.
Варьируя управления U, получим различную «эффективность» процесса, которую будем оценивать количественно целевой функцией Z, зависящей от начального состояния системы ![]() и от выбранного управления U:
и от выбранного управления U:
![]() (1.2)
(1.2)
Показатель эффективности k-го шага процесса управления, который зависит от состояния ![]() вначале этого шага и управления
вначале этого шага и управления ![]() , выбранного на этом шаге, обозначим через
, выбранного на этом шаге, обозначим через ![]() (рис. 1). В рассматриваемой задаче пошаговой оптимизации целевая функция (1.2) должна быть аддитивной, т.е.
(рис. 1). В рассматриваемой задаче пошаговой оптимизации целевая функция (1.2) должна быть аддитивной, т.е.
 (1.3)
(1.3)
Обычно условиями процесса на управление на каждом шаге ![]() накладываются некоторые ограничения. Управления, удовлетворяющие этим ограничениям, называются допустимыми.
накладываются некоторые ограничения. Управления, удовлетворяющие этим ограничениям, называются допустимыми.
Задачу пошаговой оптимизации можно сформулировать так: определить совокупность допустимых управлений ![]() , переводящих систему из начального состояния
, переводящих систему из начального состояния ![]() в конечное состояние
в конечное состояние ![]() и максимизирующих (минимизирующих) показатель эффективности (1.3).
и максимизирующих (минимизирующих) показатель эффективности (1.3).
Для единообразия формулировок (но не вычислительных процедур!) в дальнейшем будем говорить только о задаче максимизации, имея в виду, что если необходимо минимизировать Z, то заменив Z на Z’=-Z перейдем к максимизации Z’.
Начальное состояние ![]() и конечное состояние
и конечное состояние ![]() могут быть заданы однозначно или могут быть указаны множество
могут быть заданы однозначно или могут быть указаны множество ![]() начальных состояний и множество
начальных состояний и множество ![]() конечных состояний так, что
конечных состояний так, что ![]() . В последнем случае в задаче пошаговой оптимизации требуется определить совокупность допустимых управлений, переводящих систему из начального состояния
. В последнем случае в задаче пошаговой оптимизации требуется определить совокупность допустимых управлений, переводящих систему из начального состояния ![]() в конечное
в конечное ![]() и максимизирующих целевую функцию (1.3). Управление, при котором достигается максимум целевой функции (1.3) называется оптимальным управлением и обозначается через U*=
и максимизирующих целевую функцию (1.3). Управление, при котором достигается максимум целевой функции (1.3) называется оптимальным управлением и обозначается через U*=![]() .
.
Если переменные управления ![]() принимают дискретные значения, то модель ДП называется дискретной. Если же указанные переменные изменяются непрерывно, то модель ДП называется непрерывной. В зависимости от числа параметров состояний (s) и числа управляющих переменных на каждом шаге (r) различают одномерные и многомерные модели ДП. Число шагов в задаче может быть либо конечным, либо бесконечным.
принимают дискретные значения, то модель ДП называется дискретной. Если же указанные переменные изменяются непрерывно, то модель ДП называется непрерывной. В зависимости от числа параметров состояний (s) и числа управляющих переменных на каждом шаге (r) различают одномерные и многомерные модели ДП. Число шагов в задаче может быть либо конечным, либо бесконечным.
ДП применяется при оптимизации как детерминированных, так и стохастических процессов.
В некоторых задачах, решаемых методом ДП, процесс управления естественно разбивается на шаги. Например, при распределении на несколько лет ресурсов деятельности предприятия шагом естественно считать временной период; при распределении средств между n предприятиями номером шага естественно шага номер очередного предприятия. В других задачах разбиение на шаги вводится искусственно. Например, непрерывный управляемый процесс можно рассматривать как дискретный, условно разбив его на некоторые временные отрезки – шаги. Исходя из условий каждой конкретной задачи, длину шага выбирают таким образом, чтобы на каждом шаге получить простую задачу оптимизации и обеспечить требуемую точность вычислений.
2.2.2 Принцип оптимальности и уравнение Беллмана
Метод динамического программирования состоит в том, что оптимальное управление строится постепенно, шаг за шагом. На каждом шаге оптимизируется управление только этого шага. Вместе с тем на каждом шаге управление выбирается с учетом последствий, так как управление, оптимизирующее целевую функцию только для данного шага, может привести к неоптимальному эффекту всего процесса. Управление на каждом шаге должно быть оптимальным с точки зрения процесса в целом.
Иллюстрацией к сказанному выше может служить задача о выборе кратчайшего пути для перехода их точки A в точку В, если маршрут должен пройти через некоторые пункты. На рис. 2 эти пункты обозначены кружками, а соединяющие их дороги – отрезками, рядом с которыми проставлены соответствующие расстояния.
С точки зрения интересов оптимизации только каждого ближайшего шага – выбора кратчайшего пути из данной точки в соседнюю – следует двигаться по маршруту, проходящему через точки А, А1 , А3 , А2 , А4 , В. Длина этого маршрута равна 34. Такой путь из А в В не является кратчайшим. Например, маршрут, проходящий через точки А, А3 , А4 , В имеет меньшую длину, равную 25. Решив эту задачу, мы убедимся, что второй путь также не является оптимальным.
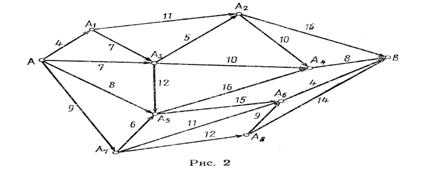
Приведенный пример многошаговой операции показывает, что управление в каждом шаге надо выбирать с учетом его последствий на предстоящих шагах. Это основное правило ДП, сформулированное Р. Беллманом называется принципом оптимальности.
Оптимальное управление обладает таким свойством, что каково бы ни было начальное состояние на любом шаге и управление, выбранное на этом шаге, последующие управления должны выбираться оптимальными относительно состояния, к которому придет система в конце данного шага.
Использование этого принципа гарантирует, что управление, выбранное на любом шаге, является не локально лучшим, а лучшим с точки зрения процесса в целом.
Так, если система в начале k-го шага находится в состоянии ![]() и мы выбираем произвольное управление
и мы выбираем произвольное управление ![]() , то система придет в новое состояние
, то система придет в новое состояние ![]() , и дальнейшие управления
, и дальнейшие управления ![]() должны выбираться оптимальными относительно состояния
должны выбираться оптимальными относительно состояния ![]() . Последнее означает, что при этих управлениях максимизируется показатель эффективности на последующих до конца процесса шагах k+1,…,n, т.е. величина
. Последнее означает, что при этих управлениях максимизируется показатель эффективности на последующих до конца процесса шагах k+1,…,n, т.е. величина ![]() Показатель, характеризующий суммарную эффективность от данного k-го до последнего n-го шага, будем обозначать через Zk
, т.е.
Показатель, характеризующий суммарную эффективность от данного k-го до последнего n-го шага, будем обозначать через Zk
, т.е. ![]() Задача оптимизации процесса, начиная с k-го до последнего n-го шага (рис.3), похожа на исходную при начальном состоянии системы
Задача оптимизации процесса, начиная с k-го до последнего n-го шага (рис.3), похожа на исходную при начальном состоянии системы ![]() , управлении
, управлении ![]() и показателе эффективности
и показателе эффективности ![]() (аналогично (2)). Выбрав оптимальное управление Uk
* на оставшихся n-k+1 шагах, получим величину
(аналогично (2)). Выбрав оптимальное управление Uk
* на оставшихся n-k+1 шагах, получим величину ![]() , которая зависит только от
, которая зависит только от ![]() , т.е.
, т.е.
![]() (2.1)
(2.1)
Назовем величину ![]() условным максимумом. Если теперь мы выберем на k-м шаге некоторое произвольное управление
условным максимумом. Если теперь мы выберем на k-м шаге некоторое произвольное управление ![]() , то система придет в состояние
, то система придет в состояние ![]() . Согласно принципу оптимальности, какое бы
. Согласно принципу оптимальности, какое бы ![]() мы не выбрали, на последующих шагах управление
мы не выбрали, на последующих шагах управление ![]() должно выбрать так, чтобы показатель эффективности Zk+1
достигал максимального значения, равного
должно выбрать так, чтобы показатель эффективности Zk+1
достигал максимального значения, равного ![]() . Остается выбрать управление
. Остается выбрать управление ![]() . Его нельзя выбирать из условия локальной максимизации показателя эффективности на данном k-м шаге, лишь бы получить
. Его нельзя выбирать из условия локальной максимизации показателя эффективности на данном k-м шаге, лишь бы получить ![]() . Такой подход был бы недальновидным, поскольку от выбора
. Такой подход был бы недальновидным, поскольку от выбора ![]() зависит новое состояние
зависит новое состояние ![]() , а от последнего – максимально возможная эффективность, которая может быть достигнута в дальнейшем, т.е. величина
, а от последнего – максимально возможная эффективность, которая может быть достигнута в дальнейшем, т.е. величина ![]() . Поэтому необходимо выбирать управление
. Поэтому необходимо выбирать управление ![]() так, чтобы оно в совокупности с оптимальным управлением на последующих шагах (начиная с (k+1) – го) приводило бы к общему максимуму показателя эффективности на n-k+1 шагах, начиная с k-го до конца. Это положение в аналитической форме можно записать в виде следующего соотношения:
так, чтобы оно в совокупности с оптимальным управлением на последующих шагах (начиная с (k+1) – го) приводило бы к общему максимуму показателя эффективности на n-k+1 шагах, начиная с k-го до конца. Это положение в аналитической форме можно записать в виде следующего соотношения:
![]() (2.2)
(2.2)
Получившего название основного функционального уравнения ДП, или уравнения Беллмана.
Из уравнения (5) может быть получена функция ![]() , если известна функция
, если известна функция ![]() ; аналогично можно получить
; аналогично можно получить ![]() , если найдена
, если найдена ![]() , и т.д., пока не будет определена величина
, и т.д., пока не будет определена величина ![]() , представляющая по определению максимальное значение показателя эффективности процесса в целом:
, представляющая по определению максимальное значение показателя эффективности процесса в целом:
![]()
Соотношения (5) для определения последовательности функций ![]() через
через ![]() (k=n, n-1,…,1) получили название основных рекуррентных уравнений Беллмана.
(k=n, n-1,…,1) получили название основных рекуррентных уравнений Беллмана.
Решая уравнения (2.2) для определения условного максимума показателя эффективности за n-k+1 шагов, начиная с k-го шага, определяем соответствующее оптимальное управление ![]() , при котором этот максимум достигается. Это управление также зависит от
, при котором этот максимум достигается. Это управление также зависит от ![]() . Будем обозначать такое управление через
. Будем обозначать такое управление через ![]() и называть условным оптимальным управлением на k-м шаге.
и называть условным оптимальным управлением на k-м шаге.
Основное значение уравнения (2.2, в котором реализована идея динамического программирования, заключается в том, что решение исходной задачи определения максимума функции (1.2) n переменных ![]() сводится к решению последовательности n задач, задаваемых соотношениями (2.2), каждое из которых является задачей максимизации функции одной переменной
сводится к решению последовательности n задач, задаваемых соотношениями (2.2), каждое из которых является задачей максимизации функции одной переменной ![]() . Эти задачи оказываются взаимосвязанными, так как в соотношении (2.2) при определении
. Эти задачи оказываются взаимосвязанными, так как в соотношении (2.2) при определении ![]() учитывается найденная при решении предыдущей задачи функция
учитывается найденная при решении предыдущей задачи функция ![]() .
.
2.2.3 Общее описание процесса моделирования и построения вычислительной схемы динамического программирования
Общая задача оптимизации, чтобы ее можно было описать моделью ДП должна удовлетворять следующим условиям :
1.Задача может интерпретироваться как n-шаговый процесс управления, а показатель эффективности процесса может быть представлен в аддитивной форме, т.е. как сумма показателей эффективности на каждом шаге.
2.Структура задачи инвариантна относительно числа шагов п, т. е. должна быть определена для любого nи не зависеть от этого числа.
3.На каждом шаге состояние системы определяется конечным числом s параметров состояния и управляется конечным числом rпеременных управления, причем sи rне зависят от числа шагов п.
4.Выбор управления на k-м шаге не влияет на предшествующие шаги, а состояние в начале этого шага есть функция только предшествующего состояния и выбранного на нем управления (отсутствие последействия).
Построение модели ДП сводится к следующим основным моментам:
1) выбирают способ деления процесса на шаги;
2) вводят параметры состояния ![]() и переменные управления
и переменные управления ![]() на каждом шаге процесса;
на каждом шаге процесса;
3) записывают уравнение состояния
![]() (3.1)
(3.1)
4) вводят показатели эффективности на k-м шаге ![]() и суммарный показатель – целевую функцию
и суммарный показатель – целевую функцию
![]() (3.2)
(3.2)
5) вводят в рассмотрение условные максимумы![]() показателя эффективности от k-гoшага (включительно) до конца процесса и условные оптимальныеуправления на k-м шаге
показателя эффективности от k-гoшага (включительно) до конца процесса и условные оптимальныеуправления на k-м шаге ![]()
6) из ограничений задачи определяют для каждого шага множества Dk допустимых управлений на этом шаге;
7) записывают основные для вычислительной схемы ДП функциональные уравнения Беллмана
![]() (3.3)
(3.3)
![]() (3.4)
(3.4)
Несмотря на единообразие в общем построении модели ДП, приведенном выше, вычислительная схема строится в зависимости от размерности задачи, характера модели (дискретной или непрерывной), вида функций (3.1), (3.2) и других характеристик модели. При всем разнообразии вычислительных схем ДП можно отметить в них некоторые общие черты.
1. Решение уравнений (3.3) проводят последовательно, начиная с (3.4). Этот этап получил название условной оптимизации.
2. В результате последовательного решения п частных задач на условный максимум определяют две последовательности функций: ![]() —условные максимумы и соответствующие им
—условные максимумы и соответствующие им ![]() —условные оптимальные управления.
—условные оптимальные управления.
3. Указанные последовательности функций в дискретных задачах получают в табличной форме, а в непрерывных моделях их можно получить аналитически.
4. После выполнения первого этапа (условной оптимизации) приступают ко второму этапу — безусловной оптимизации.
а) Если начальное состояние ![]() задано
задано ![]() ,
,
то непосредственно определяют максимум целевой
функции
![]() (3.5)
(3.5)
а затем — искомое безусловное оптимальное управление по цепочке
![]() (3.6)
(3.6)
В этой цепочке переход, указанный сплошной линией, проводят по последовательности ![]() , а пунктирной — с помощью уравнений состояний.
, а пунктирной — с помощью уравнений состояний.
б) Если задано множество ![]() начальных состояний,
начальных состояний,![]() , то дополнительно решают еще одну задачу на максимум:
, то дополнительно решают еще одну задачу на максимум:
![]() (3.7)
(3.7)
откуда находят ![]() , а затем, как и в п. а), по цепочке (3.6) —безусловное оптимальное управление.
, а затем, как и в п. а), по цепочке (3.6) —безусловное оптимальное управление.
Иногда на этапе условной оптимизации вычислительный процесс удобно строить в направлении, обратном описанному выше, т. е. от 1-го шага к л-му. Этот способ получил название прямого хода вычислений в отличие от вышеизложенного, который называется обратным ходом. Уравнения состояний для прямого хода удобно записывать в виде
![]() (3.8)
(3.8)
Они могут быть получены решением уравнений (1.1) относительно ![]() . Введем в рассмотрение условные максимумы показателя эффективности за kшагов, от 1-го до k-го включительно — величины
. Введем в рассмотрение условные максимумы показателя эффективности за kшагов, от 1-го до k-го включительно — величины ![]() . Повторив рассуждения п. 2.2.2., придем к следующей форме уравнений Беллмана:
. Повторив рассуждения п. 2.2.2., придем к следующей форме уравнений Беллмана:
![]() (3.9)
(3.9)
![]() (3.10)
(3.10)
В результате решения этих уравнений получим последовательности
![]() (3.11)
(3.11)
Этап безусловной оптимизации не отличается принципиально от аналогичного этапа в обратном ходе вычислений: ![]() , если
, если ![]() задано, или
задано, или
![]() (3.12)
(3.12)
если указано множество ![]() возможных конечных состояний. Далее, определяем безусловное оптимальное управление по цепочке
возможных конечных состояний. Далее, определяем безусловное оптимальное управление по цепочке
 (3.13)
(3.13)
2.2.4 Оптимальное распределение ресурсов
Класс задач, рассматриваемый в данной главе, имеет многочисленные практические приложения.
В общем виде эти задачи могут быть описаны следующим образом. Имеется некоторое количество ресурсов, под которыми можно понимать денежные средства, материальные ресурсы (например, сырье, полуфабрикаты, трудовые ресурсы, различные виды оборудования и т. п.). Эти ресурсы необходимо распределить между различными объектами их использования по отдельным промежуткам планового периода или по различным промежутками по различным объектам так, чтобы получить максимальную суммарную эффективность от выбранного способа распределения. Показателем эффективности может служить, например, прибыль, товарная продукция, фондоотдача (задачи максимизации) или суммарные затраты, себестоимость, время выполнения данного объема работ и т. п. (задачи минимизации).
Вообще говоря, подавляющее число задач математического программирования вписывается в общую постановку задачи оптимального распределения ресурсов. Естественно, что при рассмотрении моделей и вычислительных схем решения подобных задач методом ДП необходимо конкретизировать общую форму задачи распределения ресурсов.
В дальнейшем будем предполагать, что условия, необходимые для построения модели ДП, в задаче выполняются. Опишем типичную задачу распределения ресурсов в общем виде.
Задача 1. Имеется начальное количество средств ![]() , которое необходимо распределить в течение п лет между s предприятиями. Средства
, которое необходимо распределить в течение п лет между s предприятиями. Средства ![]() (k=1, 2,…,n; i=1,…, s), выделенные в k-м году i-му предприятию, приносят доход в размере
(k=1, 2,…,n; i=1,…, s), выделенные в k-м году i-му предприятию, приносят доход в размере ![]() и к концу года возвращаются в количестве
и к концу года возвращаются в количестве ![]() . В последующем распреелении доход может либо участвовать (частично или полностью), либо не участвовать.
. В последующем распреелении доход может либо участвовать (частично или полностью), либо не участвовать.
Требуется определить такой способ распределения ресурсов (количество средств, выделяемых каждому предприятию в каждом плановом году), чтобы суммарный доход от sпредприятий за п лет был максимальным.
Следовательно, в качестве показателя эффективности процесса распределения ресурсов за п лет принимается суммарный доход, полученный от s предприятий:
 (4.1)
(4.1)
Количество ресурсов в начале k-го года будем характеризовать величиной ![]() (параметр состояния). Управление на k-м шаге состоит в выборе переменных
(параметр состояния). Управление на k-м шаге состоит в выборе переменных ![]()
![]() обозначающих ресурсы, выделяемые в k-м году i-му предприятию.
обозначающих ресурсы, выделяемые в k-м году i-му предприятию.
Если предположить, что доход в дальнейшем распределении не участвует, то уравнение состояния процесса имеет вид
![]() (4.2)
(4.2)
Если же некоторая часть дохода участвует в дальнейшем распределении в каком-нибудь году, то к правой части равенства (4.2) прибавляется соответствующая величина.
Требуется определить nsнеотрицательных переменных ![]() , удовлетворяющих условиям (4.2) и максимизирующих функцию (4.1).
, удовлетворяющих условиям (4.2) и максимизирующих функцию (4.1).
Вычислительная процедура ДП начинается с введения функции ![]() , обозначающей доход, полученный за п—k+1 лет, начиная с k-го года до конца рассматриваемого периода, при оптимальном распределении средств между sпредприятиями, если в k-м году распределялось
, обозначающей доход, полученный за п—k+1 лет, начиная с k-го года до конца рассматриваемого периода, при оптимальном распределении средств между sпредприятиями, если в k-м году распределялось ![]() средств. Функции
средств. Функции ![]() для k=1, 2, ...n-1 удовлетворяют функциональным уравнениям (2.2), которые запишутся в виде:
для k=1, 2, ...n-1 удовлетворяют функциональным уравнениям (2.2), которые запишутся в виде:
 (4.3)
(4.3)
При k=n согласно (2.2) получаем
 (4.4)
(4.4)
Далее необходимо последовательно решить уравнения (4.4) и (4.3) для всех возможных ![]() (k = n—1, п—2, 1). Каждое из этих уравнений представляет собой задачу на оптимизацию функции, зависящей от s переменных. Таким образом, задача с nsпеременными сведена к последовательности п задач, каждая из которых содержит s переменных. В этой общей постановке задача по-прежнему сложна (из-за многомерности) и упростить ее, рассматривая как ns-шаговую задачу, в данном случае нельзя. В самом деле, попробуем это сделать. Пронумеруем шаги по номерам предприятий сначала в 1-м году, затем во 2-м и т. д.:
(k = n—1, п—2, 1). Каждое из этих уравнений представляет собой задачу на оптимизацию функции, зависящей от s переменных. Таким образом, задача с nsпеременными сведена к последовательности п задач, каждая из которых содержит s переменных. В этой общей постановке задача по-прежнему сложна (из-за многомерности) и упростить ее, рассматривая как ns-шаговую задачу, в данном случае нельзя. В самом деле, попробуем это сделать. Пронумеруем шаги по номерам предприятий сначала в 1-м году, затем во 2-м и т. д.:
и будем пользоваться одним параметром ![]() для характристики остатка средств.
для характристики остатка средств.
В течение k-го года состояние ![]() к началу любого шага s(k-1)_+i (i=1,2,…,s)определится по предыдущему состоянию
к началу любого шага s(k-1)_+i (i=1,2,…,s)определится по предыдущему состоянию ![]() с помощью простого уравнения
с помощью простого уравнения ![]()
![]() . Однако по истечении года, т.е. к началу следующего года, к наличным средствам необходимо будет добавить
. Однако по истечении года, т.е. к началу следующего года, к наличным средствам необходимо будет добавить  средств и, следовательно, состояние
средств и, следовательно, состояние ![]() в начале (ks+1)-гoшага будет зависеть не только от предшествующего ks-гoсостояния, но и от всех s состояний и управлений за прошлый год. В результате мы получим процесс с последействием. Чтобы исключить последействие, приходится вводить несколько параметров состояний; задача на каждом шаге остается по-прежнему сложной из-за многомерности.
в начале (ks+1)-гoшага будет зависеть не только от предшествующего ks-гoсостояния, но и от всех s состояний и управлений за прошлый год. В результате мы получим процесс с последействием. Чтобы исключить последействие, приходится вводить несколько параметров состояний; задача на каждом шаге остается по-прежнему сложной из-за многомерности.
Задача 2. Планируется деятельность двух предприятий (s=2) в течение п лет. Начальные средства составляют ![]() . Средства х, вложенные в предприятие I, приносят к концу года доход f1
(x) и возвращаются в размере
. Средства х, вложенные в предприятие I, приносят к концу года доход f1
(x) и возвращаются в размере ![]() аналогично, средства х, вложенные в предприятие II, дают доход f2
(x) и возвращаются в размере
аналогично, средства х, вложенные в предприятие II, дают доход f2
(x) и возвращаются в размере ![]() . По истечении года все оставшиеся средства заново перераспределяются между предприятиями I и II, новых средств не поступает и доход в производство не вкладывается.
. По истечении года все оставшиеся средства заново перераспределяются между предприятиями I и II, новых средств не поступает и доход в производство не вкладывается.
Требуется найти оптимальный способ распределения имеющихся средств.
Будем рассматривать процесс распределения средств как n-шаговый, в котором номер шага соответствует номеру года. Управляемая система — два предприятия с вложенными в них средствами. Система характеризуется одним параметром состояния ![]() —количеством средств, которые следует перераспределить в начале k-гoгода. Переменных управления на каждом шаге две:
—количеством средств, которые следует перераспределить в начале k-гoгода. Переменных управления на каждом шаге две: ![]() — количество средств, выделенных соответственно предприятию I и II. Так как средства ежегодно перераспределяются полностью, то
— количество средств, выделенных соответственно предприятию I и II. Так как средства ежегодно перераспределяются полностью, то ![]()
![]() ). Для каждого шага задача становится одномерной. Обозначим
). Для каждого шага задача становится одномерной. Обозначим ![]() через
через ![]() , тогда
, тогда ![]()
Показатель эффективности k-гoшага равен ![]()
![]() . Это — доход, полученный от двух предприятий в течение k-гoгода.
. Это — доход, полученный от двух предприятий в течение k-гoгода.
Показатель эффективности задачи — доход, полученный от двух предприятий в течение п лет — составляет
![]() (4.5)
(4.5)
Уравнение состояния выражает остаток средств ![]() после k-гoшага и имеет вид
после k-гoшага и имеет вид
![]() (4.6)
(4.6)
Пусть ![]() —условный оптимальный доход, полученный от распределения средств
—условный оптимальный доход, полученный от распределения средств ![]() между двумя предприятиями за n—k+1 лет, начиная с k-гoгода до конца рассматриваемого периода. Запишем рекуррентные соотношения для этих функций:
между двумя предприятиями за n—k+1 лет, начиная с k-гoгода до конца рассматриваемого периода. Запишем рекуррентные соотношения для этих функций:
![]() (4.7)
(4.7)
![]()
где ![]() - определяется из уравнения состояния (4.6).
- определяется из уравнения состояния (4.6).
При дискретном вложении ресурсов может возникнуть вопрос о выборе шага х в изменении переменных управления. Этот шаг может быть задан или определяется исходя из требуемой точности вычислений и точности исходных данных. В общем случае эта задача сложна, требует интерполирования по таблицам ![]() на предыдущих шагах вычисления. Иногда предварительный анализ уравнения состояния позволяет выбрать подходящий шаг х, а также установить предельные значения
на предыдущих шагах вычисления. Иногда предварительный анализ уравнения состояния позволяет выбрать подходящий шаг х, а также установить предельные значения ![]() , для которых на каждом шаге нужно выполнить табулирование.
, для которых на каждом шаге нужно выполнить табулирование.
Рассмотрим двумерную задачу, аналогичную предыдущей, в которой строится дискретная модель ДП процесса распределения ресурсов.
Задача 3. Составить оптимальный план ежегодного распределения средств между двумя предприятиями в течение трехлетнего планового периода при следующихусловиях:
1) начальная сумма составляет 400;
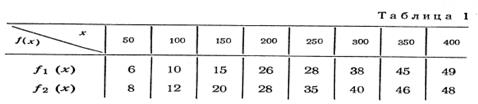
2) вложенные средства в размере х приносят на предприятии I доход f1 (x)и возвращаются в размере 60% от х, а на предприятии II — соответственно f2(x) и 20%;
3) ежегодно распределяются все наличные средства, получаемые из возвращенных средств:
4) функции f1 (x)и f2(x)заданы в табл. 1:
Модель динамического программирования данной задачи аналогична модели, составленной в задаче 1.
Процесс управления является трехшаговым. Параметр ![]() — средства, подлежащие распределению в k-м году (k=l, 2, 3). Переменная управления
— средства, подлежащие распределению в k-м году (k=l, 2, 3). Переменная управления ![]() — средства, вложенные в предприятие I в k-м году. Средства, вложенные в предприятие II в k-м году, составляют
— средства, вложенные в предприятие I в k-м году. Средства, вложенные в предприятие II в k-м году, составляют ![]() Следовательно, процесс управления на k-м шаге зависит от одного параметра
Следовательно, процесс управления на k-м шаге зависит от одного параметра ![]() (модель одномерная). Уравнение состояния запишется в виде
(модель одномерная). Уравнение состояния запишется в виде
![]() (4.8)
(4.8)
А функциональные уравнения в виде
![]() (4.9)
(4.9)
![]() (4.10)
(4.10)
Попытаемся определить максимально возможные значения, для которых необходимо проводить табулирование на k-м шаге (k=l, 2, 3). При ![]() =400 из уравнения (4.8) определяем максимально возможное значение
=400 из уравнения (4.8) определяем максимально возможное значение ![]() имеем
имеем ![]() = 0,6*400=2400 (все средства вкладываются в предприятие I). Аналогично, для
= 0,6*400=2400 (все средства вкладываются в предприятие I). Аналогично, для ![]() получаем предельное значение 0,6*240 = 144. Пусть интервал изменения
получаем предельное значение 0,6*240 = 144. Пусть интервал изменения ![]() совпадает с табличным, т. е. х =50. Составим таблицу суммарной прибыли на данном шаге:
совпадает с табличным, т. е. х =50. Составим таблицу суммарной прибыли на данном шаге:
![]()
Это облегчит дальнейшие расчеты. Так как ![]() то клетки, расположенные по диагонали таблицы, отвечают одному и тому же значению
то клетки, расположенные по диагонали таблицы, отвечают одному и тому же значению ![]() , указанному в 1-й строке (в 1-м столбце) табл. 2. Во 2-й строке таблицы записаны значения f1
(x), а во 2-м столбце — значения f2
(у)взятые из табл. 1.Значения в остальных клетках таблицы получены сложением чисел f1
(x) и f2
(у),стоящих во 2-й строке и во 2-м столбце и соответствующих столбцу и строке, на пересечении которых находится данная клетка. Например, для
, указанному в 1-й строке (в 1-м столбце) табл. 2. Во 2-й строке таблицы записаны значения f1
(x), а во 2-м столбце — значения f2
(у)взятые из табл. 1.Значения в остальных клетках таблицы получены сложением чисел f1
(x) и f2
(у),стоящих во 2-й строке и во 2-м столбце и соответствующих столбцу и строке, на пересечении которых находится данная клетка. Например, для ![]() =150 получаем ряд чисел: 20 —для х = 0, у=150; 18 —для х=50, у=100; 18— для х—100, у=50; 15 — для х= 150, у=0.
=150 получаем ряд чисел: 20 —для х = 0, у=150; 18 —для х=50, у=100; 18— для х—100, у=50; 15 — для х= 150, у=0.
Проведем условную оптимизацию по обычной схеме. 3-й шаг. Основное уравнение (4.9)
![]()
Как указывалось выше, ![]() . Просмотрим числа на диагоналях, соответствующих
. Просмотрим числа на диагоналях, соответствующих ![]() =0; 50; 100; 150 и на каждой диагонали выберем наибольшее. Это и есть
=0; 50; 100; 150 и на каждой диагонали выберем наибольшее. Это и есть ![]() В 1-й строке находим соответствующее условное оптимальное управление. Данные оптимизации на 3-м шаге поместим в основную таблицу (табл. 4). В ней введен столбец х, который в дальнейшем используется при интерполяции.
В 1-й строке находим соответствующее условное оптимальное управление. Данные оптимизации на 3-м шаге поместим в основную таблицу (табл. 4). В ней введен столбец х, который в дальнейшем используется при интерполяции.
Оптимизация 2-го шага проведена в табл. 5 согласно уравнению вида (4.10):
![]()
При этом может быть получен максимальный доход, равный Zmax=99,l. Прямой подсчет дохода по табл. 2 для найденного оптимального управления дает 97,2. Расхождение в результатах на 1,9 (около 2%) объясняется ошибкой линейной интерполяции.
Мы рассмотрели несколько вариантов задачи оптимального распределения ресурсов. Существуют другие варианты этой задачи, особенности которых учитываются соответствующей динамической моделью.
2.2.5 Оптимальное управление запасами
Класс задач, в которых рассматривается оптимальное управление Запасами, является наиболее характерным для динамического программирования. Это обусловлено тем, что в задачах управления запасами процесс естественно разворачивается во времени, причем управление как раз и заключается в том, что решение на данном промежутке времени принимается с учетом того состояния, к которому пришла система за предшествующие периоды времени. Кроме того, эти задачи связаны, как правило, с дискретным характером переменных и, следовательно, решаются довольно сложно другими методами. Наконец, весьма важным обстоятельством является то, что форма зависимостей задачи для каждого периода времени является довольно простой (часто — линейной), что облегчает решение частной задачи оптимизации на каждом шаге, в то время как единовременное решение общей задачи с большим числом переменных (для многих промежутков времени и кусочно-линейной или нелинейной целевой функцией для всего процесса) является достаточно сложным.
Проблема управления запасами является одной из важнейших областей практического приложения экономико-математических методов, в том числе методов математического программирования. Мы ограничимся анализом некоторых простейших задач с целью иллюстрации их решения методами динамического программирования.
При формулировке задач управления запасами используют такие понятия.
Запасы — это любые денежные или материальные ценности, которые периодически пополняются (производятся, доставляются и т. д.) и некоторое время сохраняются с целью расходования их в последующие промежутки времени. Уровень запасов в любой момент времени определяется начальным уровнем запасов плюс пополнение и минус расход за промежуток времени от начального момента до данного.
Управление запасами в общем случае состоит в воздействии на соотношение между двумя основными факторами— пополнением и расходом. Цель управления — оптимизация некоторого критерия, зависящего от расходов на хранение запасов, стоимости поставок, затрат, связанных с пополнением, штрафов и т. д.
В такой общей постановке подобные задачи могут иметь самое разнообразное практическое применение. Например, под запасами можно понимать продукцию предприятия, которая производится непрерывно (пополнение) и отгружается потребителям определенными дискретными партиями (расход). При этом спрос на продукцию предполагается наперед заданным (детерминированный спрос) или подверженным случайным колебаниям (стохастическая задача). Управление запасами состоит в определении, размеров необходимого выпуска продукции для удовлетворения заданного спроса. Цель — минимизация суммарных затрат на хранение и пополнение запасов. Под запасами можно понимать запасы сырья или других материалов, поставляемых дискретными партиями (пополнение) и должных обеспечить непрерывное потребление в процессе производства (расход). Критерием оптимальности могут служить суммарные затраты на хранение запасов, замораживание оборотных средств и поставки запасов.
Запасами могут быть товары, поставляемые в магазин определенными партиями и предназначенные для удовлетворения непрерывного, но подверженного случайным колебаниям покупательского спроса. Критерий оптимальности — суммарные затраты на поставки, хранение запасов и изменение производственного ритма в связи с вариациями спроса.
Запасами могут быть и сезонные товары, сохраняющиеся на складе ограниченной емкости. Товары можно покупать и продавать в различных количествах по ценам, меняющимся во времени. Задача состоит в определении политики покупок и продаж, обеспечивающих максимум суммарной прибыли, и является примером задачи складирования.
Число таких примеров можно было бы умножить. Однако в настоящем параграфе мы рассмотрим лишь некоторые простейшие динамические модели задач управления запасами.
Если в задаче исходные данные определены однозначно, то задачи называются детерминированными; если же хотя бы часть данных носит случайный характер и заданы распределения вероятностей, то соответствующие задачи называются стохастическими. В этой главе мы ограничимся примерами детерминированных задач управления запасами.
Рассмотрим модель задачи управления запасами при заданном расходе. Управление в этих задачах будет сводиться к пополнению.
Задача 1. Планируемый период разделен на nпромежутков времени (дни, месяцы, кварталы и т. д.), в которых задан расход dk (k=l, 2, ..., п), производимый в конце каждого из промежутков. Известны начальный уровень запасов и зависимость суммарных затрат на хранение и пополнение запасов в данном периоде от среднего уровня хранимых запасов и их пополнения.
Требуется определить размеры пополнения запасов в каждом промежутке времени для удовлетворения заданного расхода из условия минимизации суммарных затрат за весь планируемый период времени.
Составим математическую модель задачи. Обозначим размер пополнения запасов в k-м промежутке времени через xk
, а уровень запасов в начале этого промежутка (после произведенного расхода) — через ![]() -Согласно условию, суммарные затраты в k-м промежутке зависят от xk
и
-Согласно условию, суммарные затраты в k-м промежутке зависят от xk
и ![]() — среднего уровня запасов в k-м промежутке, равного
— среднего уровня запасов в k-м промежутке, равного
![]() (5.1)
(5.1)
Следовательно, затраты в k-м промежутке можно рассматривать как функцию ![]()
Целевая функция задачи — суммарные затраты — запишется в виде
 (5.2)
(5.2)
Требуется определить переменные xk
, которые связаны с переменными ![]() балансовыми уравнениями
балансовыми уравнениями
![]() (5.3)
(5.3)
выражающими уровень запаса в начале (k+1)-гoпромежутка через сумму уровня запасов в начале k-гoпромежутка ![]() и пополнения запасов в этом промежутке xk
минус расход dk
.
и пополнения запасов в этом промежутке xk
минус расход dk
.
Ставится задача — найти совокупность п переменных xk , удовлетворяющих ограничениям (5.3) — (5.5) и минимизирующих функцию (5.2).
Подобные задачи при большом числе переменных и нелинейности функций ![]() другими методами математического программирования решаются сложно. Особенно сложным становится решение, когда на переменные xk
налагаются условия целочисленности (или в общем случае — дискретности), как это часто бывает.
другими методами математического программирования решаются сложно. Особенно сложным становится решение, когда на переменные xk
налагаются условия целочисленности (или в общем случае — дискретности), как это часто бывает.
Дадим описание динамической модели задачи. Будем рассматривать n-шаговый процесс оптимизации с параметрами состояния ![]() и переменными управлениями xk
. Тогда равенство (5.3) представляет собой уравнение состояния. Здесь удобнее использовать прямую схему расчета, так как задано конечное состояние.
и переменными управлениями xk
. Тогда равенство (5.3) представляет собой уравнение состояния. Здесь удобнее использовать прямую схему расчета, так как задано конечное состояние.
В задачах управления запасами чаще всего возникает именно такая ситуация, поэтому продемонстрируем построение прямой схемы вычислений.
Обозначим через ![]() ) условные оптимальные затраты за промежутки, начиная с 1-го до k-гoвключительно, если в конце k-гoпромежутка уровень запасов равен
) условные оптимальные затраты за промежутки, начиная с 1-го до k-гoвключительно, если в конце k-гoпромежутка уровень запасов равен ![]() .
.
Начинаем с условной оптимизации 1-го шага в предположении, что к концу этого шага система окажется в состоянии
![]() (5.6)
(5.6)
На k-м шаге получим соответственно
![]() (5.7)
(5.7)
В соответствии с формой рекуррентных соотношений удобно и уравнение состояния (5.3) записать в виде
![]() (5.8)
(5.8)
При решении локальных задач в соответствии с уравнениями (5.6) и (5.7) будем считать, что состояние ![]() в конце шага известно. Поэтому и неравенство (5.4) удобно записать для
в конце шага известно. Поэтому и неравенство (5.4) удобно записать для ![]() т. е. в виде
т. е. в виде ![]() , откуда следуют ограничения на xh
:
, откуда следуют ограничения на xh
:
![]() (5.9)
(5.9)
Функцию затрат также удобно привести к зависимости от состояния в конце шага, используя уравнение (5.8):
![]()
Выполнив условную оптимизацию, получим последовательно
![]()
Далее (безусловная оптимизация), находим Zmax
=![]() при заданном конечном состоянии, или Zmax
=
при заданном конечном состоянии, или Zmax
= ![]() и
и ![]() , если конечное состояние не задано. Затем последовательно определяем
, если конечное состояние не задано. Затем последовательно определяем
![]()
Данная задача является примером общего случая, когда функции ![]() ) — затраты на производство и
) — затраты на производство и ![]() — затраты на хранение — являются вогнутыми (Функция f(x), определенная в промежутке X, называется вогнутой, если для любых точек x1
— затраты на хранение — являются вогнутыми (Функция f(x), определенная в промежутке X, называется вогнутой, если для любых точек x1
![]() X, x2
X, x2
![]() X (x1
X (x1![]() x2
) выполняется неравенство f(t1
x1
+t2
x2
)t1
f(x1
)+t2
f(x2
) при любых t1
0, t2
0 таких, что t1
+t2
=1). Тогда суммарные затраты
x2
) выполняется неравенство f(t1
x1
+t2
x2
)t1
f(x1
)+t2
f(x2
) при любых t1
0, t2
0 таких, что t1
+t2
=1). Тогда суммарные затраты ![]() и целевая функция
и целевая функция ![]() также вогнутые функции от переменных
также вогнутые функции от переменных ![]()
Если ![]() общая сумма затрат, то вогнутость функций Z означает, что каждая дополнительная единица продукции (производимая, хранимая) стоит не больше предыдущей. Подобная ситуация чаще всего встречается в производстве.
общая сумма затрат, то вогнутость функций Z означает, что каждая дополнительная единица продукции (производимая, хранимая) стоит не больше предыдущей. Подобная ситуация чаще всего встречается в производстве.
Модель задачи с вогнутыми функциями затрат на производство и хранение называется динамической моделью экономически выгодного размера партии .
Вогнутость функции производственных затрат встречается, например, в случае, если выпуск продукции связан с затратами на дополнительную операцию, переналадку оборудования или освоение нового оборудования. После этой подготовительной стадии процесса производства (больших единовременных затрат) выпуску каждой дополнительной единицы продукции соответствуют не меняющиеся пропорциональные затраты.
Другим примером может служить модель задачи пополнения запасов у внешнего поставщика, который нередко делает скидки в зависимости от размера закупаемой партии, назначает ступенчатые цены.
Например, функция

является вогнутой, так как коэффициент при xh убывает с ростом xh
Известно, что глобальный минимум вогнутой функции достигается по крайней мере в одной из угловых точек области. В рассмотренном выше случае область задана системой п линейных уравнений (5.3). и условиями неотрицательности (5.4) и (5.5). Угловым точкам области соответствуют опорные решения системы (5.3); в каждом из которых не более чем п переменных xk
и ![]() положительны, а остальные равны нулю. Предположим, что все
положительны, а остальные равны нулю. Предположим, что все ![]() . Тогда, при любом k, если
. Тогда, при любом k, если ![]() , то
, то ![]() , а если
, а если ![]() , то
, то ![]() , иначе нечем будет обеспечить расход dk
к концу k-гoпериода. Одновременно невозможно, чтобы
, иначе нечем будет обеспечить расход dk
к концу k-гoпериода. Одновременно невозможно, чтобы ![]() , так как при этом в опорном решении системы (5.3) оказалось бы более чем п положительных составляющих.
, так как при этом в опорном решении системы (5.3) оказалось бы более чем п положительных составляющих.
Из уравнения состояния (5.8) получим
![]()
При проведении условной оптимизации на k-м шаге согласно уравнению (5.7) достаточно сравнить и выбрать наименьшее из двух значений в указанных двух точках, которые принимает выражение, содержащееся в фигурных скобках:

Для 1-го шага (k=1) имеем ![]() и, следовательно,
и, следовательно,
![]()
Оптимальное управление пополнением запасов xk
на любом k-м шаге имеет следующий вид: ![]()
![]()
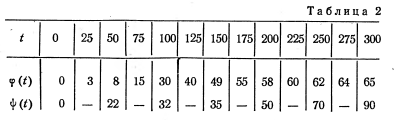
Задача 2. Определить оптимальное пополнение запасов в течение четырех периодов при следующих условиях: ![]() пополнение запасов может производиться партиями, кратными 50; функции затрат на хранение
пополнение запасов может производиться партиями, кратными 50; функции затрат на хранение ![]() и на пополнение
и на пополнение ![]() , одинаковые для всех периодов времени, заданы в табл. 2:
, одинаковые для всех периодов времени, заданы в табл. 2:
Задача носит дискретный характер. Для упрощения, поскольку расход и пополнение кратны 50, расчеты будем вести в целых партиях. Таким образом, d1
= 3, d2
=l, d3
= 2, d4
= 2, переменные xh
и параметры ![]() меняются с шагом в единицу. Вычисления выполняем в соответствии с моделью, приведенной в задаче 1. Как обычно, при выполнении первого этапа расчеты производим в таблицах: основной (табл. 3) и вспомогательных (табл. 4—7).
меняются с шагом в единицу. Вычисления выполняем в соответствии с моделью, приведенной в задаче 1. Как обычно, при выполнении первого этапа расчеты производим в таблицах: основной (табл. 3) и вспомогательных (табл. 4—7).
Для 1-го шага имеем единственное значение ![]()
![]() . Поэтому
. Поэтому
![]()
Прежде чем перейти к табулированию, определим предельные значения для параметров состояния. Так как ![]() , то даже при
, то даже при ![]() должно быть
должно быть ![]() , следовательно,
, следовательно, ![]() . Соответственно
. Соответственно ![]()
В заключение настоящей главы рассмотрим тип задач, названных выше задачами складирования.
Особенностью этих задач является наличие двух переменных управления (двумерная модель). Однако решение этих задач значительно упрощается благодаря линейности целевой функции.
Задача 3. Емкость склада по хранению запасов ограничена некоторой величиной с. В каждом из п промежутков времени запасы могут пополняться с затратами ![]() на единицу продукции и расходоваться с получением дохода
на единицу продукции и расходоваться с получением дохода ![]() за единицу продукции, причем решение о пополнении или расходовании запасов принимается однократно в каждом промежутке времени. Определить оптимальную стратегию в управлении запасами из условия максимизации суммарной прибыли при заданном начальном уровне запасов.
за единицу продукции, причем решение о пополнении или расходовании запасов принимается однократно в каждом промежутке времени. Определить оптимальную стратегию в управлении запасами из условия максимизации суммарной прибыли при заданном начальном уровне запасов.
Уточним постановку задачи. Возможны три варианта в очередности пополнения и расходования запасов в каждом из промежутков времени: I вариант — пополнение предшествует расходу; II вариант — расход предшествует пополнению и III вариант — очередность любая.
В III варианте выбор оптимальной стратегии означает не только определение размера пополнения и расхода, но и выбор оптимальной очередности в каждом из промежутков времени.
Указанные варианты условия отразятся на форме ограничений модели задачи.
Составим динамическую модель задачи. Рассмотрим n-шаговый процесс, понимая под k-м шагом промежуток времени, в котором принимается решение о пополнении или расходовании запасов (k = 1, 2,..., п).
В качестве параметров состояния ![]() примем запас товаров в начале k-гoшага. Переменными управления служат размеры пополнения (хк
) и расхода (ук
) запасов на k-м шаге. Тогда уравнение состояния, выражающее материальный баланс запасов, запишется в виде
примем запас товаров в начале k-гoшага. Переменными управления служат размеры пополнения (хк
) и расхода (ук
) запасов на k-м шаге. Тогда уравнение состояния, выражающее материальный баланс запасов, запишется в виде
![]() (5.11)
(5.11)
Будем решать задачу с помощью обратной вычислительной схемы, т. е. используя рекуррентные соотношения в виде
![]() (5.12)
(5.12)
![]() (5.13)
(5.13)
Переменные задачи должны удовлетворять условиям неотрицательности:
![]() (5.14)
(5.14)
и дополнительным ограничениям для всех k, зависящих от варианта постановки задачи:
![]() (5.15)
(5.15)
![]() (5.15’)
(5.15’)
III вариант: или (5.15), или (5.15).
Первые неравенства в (5.15) и (5.15) диктуются ограниченной емкостью склада, вторые — условием, согласно которому расход не может превышать наличные запасы. Для III варианта альтернативные условия означают, что если будет принято решение сначала пополнить запасы, а затем их расходовать, то должны выполняться условия (5.15); если же будет принят противоположный порядок, то должны выполняться условия (5.15).
Решение задач условной максимизации по двум переменным согласно рекуррентным соотношениям (5.12) и (5.13) в общем случае представляет собой сложную задачу, однако линейность функций
![]() и
и ![]()
максимумы которых определяются на каждом шаге, а также ограничений, налагаемых на переменные, позволяет значительно упростить решение всех этих частных задач.
Рассмотрим подробнее решение задачи в I варианте постановки. Ограничения (5.14) и (5.15) определяют при данном значении параметра ![]() область допустимых значений Хk
и Ук в виде выпуклого четырехугольника ABCD, изображенную на рис. 6. Так как в этой области максимизируется линейная функция, то получается задача линейного программирования, оптимальное решение которой достигается, по крайней мере, в одной из вершин области. На рис. 6 находим координаты всех четырех вершин:
область допустимых значений Хk
и Ук в виде выпуклого четырехугольника ABCD, изображенную на рис. 6. Так как в этой области максимизируется линейная функция, то получается задача линейного программирования, оптимальное решение которой достигается, по крайней мере, в одной из вершин области. На рис. 6 находим координаты всех четырех вершин: ![]()
![]() . Поэтому вместо нахождения максимума по соотношениям (3.12) и (3.13) при произвольных изменениях
. Поэтому вместо нахождения максимума по соотношениям (3.12) и (3.13) при произвольных изменениях ![]() достаточно вычислить значения выражений, содержащихся в фигурных скобках, во всех четырех вершинах и путем сравнения выбрать среди них наибольшее.
достаточно вычислить значения выражений, содержащихся в фигурных скобках, во всех четырех вершинах и путем сравнения выбрать среди них наибольшее.
При этом для последнего (n-го) шага можно ограничиться выбором из двух альтернатив, так как значение ![]() в точках А и Dдает заведомо меньшее число, чем соответственно в точках В ч С.
в точках А и Dдает заведомо меньшее число, чем соответственно в точках В ч С.
Итак, для n-го шага получаем
![]() (5.12’)
(5.12’)
Для выполнения оптимизации на последующих шагах предварительно найдем из уравнения (5.11) значение ![]() для каждой точки. Тогда получим:
для каждой точки. Тогда получим: ![]() в точке А;
в точке А; ![]() в точке
в точке ![]() в точке
в точке ![]() в точке D. Вместо соотношения (5.13) получаем
в точке D. Вместо соотношения (5.13) получаем
 (5.13’)
(5.13’)
При выполнении практических расчетов оказывается достаточным не табулировать функции ![]() Для всех значений
Для всех значений ![]() , а ограничиться вычислением этих функций лишь для крайних значений
, а ограничиться вычислением этих функций лишь для крайних значений ![]() т. е. для
т. е. для ![]()
![]()
В случае II варианта исходной постановки задачи получим область, изображенную на рис. 7. В новой области изменятся лишь координаты вершины С; находим ![]() . Аналогично предыдущему получим следующие формулы для выполнения условной максимизации:
. Аналогично предыдущему получим следующие формулы для выполнения условной максимизации:
![]() (5.12’’)
(5.12’’)
 (5.13’’)
(5.13’’)
Наконец, при III варианте постановки задачи на каждом шаге мы должны выбрать наибольшее число по формулам (3.12), (3.13) и сравнить его с наибольшим числом, найденным по формулам (3.12), (3.13). Сопоставив полученные таким образом два значения ![]() выбираем из них наибольшее. Это и есть окончательное выражение для
выбираем из них наибольшее. Это и есть окончательное выражение для ![]() Одновременно, в зависимости от того, к какому из вариантов относится найденный максимум, устанавливается выгодная на данном шаге очередность пополнения и расхода запасов.
Одновременно, в зависимости от того, к какому из вариантов относится найденный максимум, устанавливается выгодная на данном шаге очередность пополнения и расхода запасов.
Поскольку выражение (3.12) содержится среди альтернатив выбора по формуле (3.12), для k-го шага достаточно производить выбор только по соотношению (3.12).
Аналогично, так как среди четырех альтернатив в формуле (3.13) только третья альтернатива отличается от выбираемых по формуле (3.13), то достаточно производить выбор по формуле (3.13), добавив пятую альтернативу.
2.2.6 Задача о замене
Одной из важных экономических проблем, с которыми приходится встречаться на практике, является определение оптимальной стратегии в замене старых станков, производственных зданий, агрегатов, машин и т. д., другими словами, старого оборудования — на новое.
Старение оборудования включает его физический и моральный износ, в результате чего растут производственные затраты по выпуску продукции на старом оборудовании, увеличиваются затраты на его ремонт и обслуживание, а вместе с тем снижаются производительность и так называемая ликвидная стоимость.
Наступает момент, когда старое оборудование более выгодно продать, заменить новым, чем эксплуатировать ценой больших затрат. При этом оборудование можно заменить либо новым оборудованием того же вида, либо новым, более совершенным в техническом отношении, с учетом технического прогресса.
Оптимальная стратегия замены оборудования состоит в определении оптимальных сроков замены. Критерием оптимальности при определении сроков замены может служить либо прибыль от эксплуатации оборудования, которую следует максимизировать, либо суммарные затраты на эксплуатацию в течение рассматриваемого промежутка времени, подлежащие минимизации. Известно, что при заданном плане выпуска продукции максимизация прибыли эквивалентна минимизации затрат. Практически удобнее пользоваться вторым критерием, вводя для учета снижения производительности условно приведенные затраты.
Условимся считать, что решения о замене оборудования принимаются периодически в начале каждого промежутка (года, месяца, недели и т. д.), на которые разбит плановый период. Предположим также, что оборудование может использоваться неограниченно долго, если тратить достаточные суммы на его ремонт.
Основной характеристикой оборудования является его возраст. От возраста оборудования зависят эксплуатационные расходы, затраты на производство, производительность и ликвидная стоимость. Эти показатели изменяются, если учитывать технический прогресс, не только при замене старого оборудования новым, с новыми технико-экономическими характеристиками, но и новым того же типа, еще не использованным. В последнем случае изменение вызвано моральным износом.
Метод ДП обеспечивает единый подход к решению всех видов задач о замене.
При составлении модели ДП мы рассматриваем процесс замены как n-шаговый, разбив весь плановый период на п промежутков. Так как в начале каждого из этих промежутков принимается решение либо о сохранении оборудования, либо о его замене, то управление на k-м шаге (k=l, ..., п) содержит всего лишь две альтернативные переменные. Обозначим через ис решение, состоящее в сохранении старого оборудования, а через и3 — решение, состоящее в замене старого оборудования новым. Функциональные уравнения, благодаря наличию двух альтернативных управлений на каждом шаге, содержат лишь две величины: одна выражает условную прибыль (условные затраты) при управлении uс , другая — тот же показатель при управлении из . Условная оптимизация на каждом шаге состоит в вычислении двух величин и в выборе из них наибольшей (наименьшей). Это значительно упрощает расчеты на стадии условной оптимизации и позволяет решать вручную задачи о замене с большим числом шагов.
Рассмотрим две модели ДП задачи о замене оборудования. В одной из них в качестве показателя эффективности выберем прибыль, которую следует максимизировать, в другой — суммарные затраты на эксплуатацию, которые следует минимизировать.
Задача 1. Определить оптимальные сроки замены оборудования в течение п лет, при которых прибыль от эксплуатации оборудования максимальна, если известны: р — начальная стоимость оборудования; f(t) —стоимость производимой продукции на оборудовании возраста t лет; r(t) —ежегодные затраты на эксплуатацию оборудования возраста tлет; ![]() —ликвидная стоимость оборудования возраста tлет. .
—ликвидная стоимость оборудования возраста tлет. .
Рассмотрим n-шаговый процесс, считая k-м шагом номер k-гoгода от начала эксплуатации (k=l, 2, ..., п). Выше указывалось, что управление на k-м шаге выбирается из двух возможных решений: uс — сохранить и продолжать использование старого оборудования или и3 — заменить оборудование новым.
Будем считать, что в начале планового периода возраст оборудования равен t0
. Состояние ![]() -системы (оборудования) в начале k-roшага характеризуется одним параметром
-системы (оборудования) в начале k-roшага характеризуется одним параметром ![]() — возрастом оборудования. Для k-ro шага параметр состояния tможет принимать значения 0,1, 2, ..., k—1, т. е. tk-1
— возрастом оборудования. Для k-ro шага параметр состояния tможет принимать значения 0,1, 2, ..., k—1, т. е. tk-1
Если к началу k-гoшага система находилась в состоянии ![]() , то под влиянием управления ис
в конце k-гoшага она перейдет в состояние
, то под влиянием управления ис
в конце k-гoшага она перейдет в состояние ![]() возраст оборудования увеличится на один год. Под влиянием управления и3
, принятого на k-м шаге, система перейдет в состояние
возраст оборудования увеличится на один год. Под влиянием управления и3
, принятого на k-м шаге, система перейдет в состояние ![]() (замену произвели в начале k-гoгода; в конце k-го года возраст нового оборудования равен одному году).
(замену произвели в начале k-гoгода; в конце k-го года возраст нового оборудования равен одному году).
Уравнение состояния (1.2) для данного процесса имеет вид
![]() (6.1)
(6.1)
Определим прибыль на k-м шаге (показатель эффективности k-гoшага), соответствующую каждому из альтернативных управлений ис и и3 . Выбирая на k-м шаге управление ис , мы сможем произвести продукции стоимостью f(t) на старом оборудовании, что потребует затрат r(t), поэтому прибыль равна f(t)—r(t). Обозначим ее через
![]() (6.2)
(6.2)
При управлении и3
получим доход ![]() от продажи старого оборудования (ликвидную стоимость) и f(0) от произведенной на новом оборудовании продукции, затратив р на приобретение нового оборудования и r(0) на содержание нового оборудования. В этом случае прибыль (обозначим ее через
от продажи старого оборудования (ликвидную стоимость) и f(0) от произведенной на новом оборудовании продукции, затратив р на приобретение нового оборудования и r(0) на содержание нового оборудования. В этом случае прибыль (обозначим ее через ![]() ) составляет
) составляет
![]() (6.3)
(6.3)
Построим обратную вычислительную схему решения данной задачи методом ДП.
Обозначим через ![]() условную максимальную прибыль, полученную за n—k+lшагов использования оборудования с k-гoпо n-й шаг включительно, если к k-му шагу возраст оборудования составлял
условную максимальную прибыль, полученную за n—k+lшагов использования оборудования с k-гoпо n-й шаг включительно, если к k-му шагу возраст оборудования составлял ![]() лет, при условии, что был выбран оптимальный режим эксплуатации. Соответствующее условное оптимальное управление на k-м шаге обозначим через
лет, при условии, что был выбран оптимальный режим эксплуатации. Соответствующее условное оптимальное управление на k-м шаге обозначим через ![]() . Условный максимальный доход за последний n-й промежуток составляет
. Условный максимальный доход за последний n-й промежуток составляет
![]() (6.4)
(6.4)
Сравнив эти две величины для всех возможных значений tnполучим значения ![]() и соответствующие значения
и соответствующие значения ![]() . Предположим, что для всех значений
. Предположим, что для всех значений ![]() известна максимальная прибыль, полученная за n—kшагов с (k+1)-гoпо n-й включительно. Поэтому основные рекуррентные соотношения можно записать в виде
известна максимальная прибыль, полученная за n—kшагов с (k+1)-гoпо n-й включительно. Поэтому основные рекуррентные соотношения можно записать в виде
![]() (6.5)
(6.5)
В уравнении (6.5) величина ![]() —условная максимальная прибыль, полученная за n—kшагов, если к началу (k+l)-гoшага система находилась в состоянии
—условная максимальная прибыль, полученная за n—kшагов, если к началу (k+l)-гoшага система находилась в состоянии ![]() (возраст оборудования составлял один год).
(возраст оборудования составлял один год).
•Процесс условной оптимизации на каждом шаге, начиная с n-го, сводится к сравнению двух величин в уравнениях (6.4) и (6.5) и выбору наибольшей из них. Этап условной оптимизации заканчивается, как обычно, получением последовательностей функций ![]()
На этапе безусловной оптимизации для ![]() (возраст оборудования в начале процесса) получаем
(возраст оборудования в начале процесса) получаем ![]()
![]() , а далее по цепочке:
, а далее по цепочке: ![]() , из (6.1) находим
, из (6.1) находим ![]() ,, откуда
,, откуда ![]() , и т. д. Оптимальное управление
, и т. д. Оптимальное управление ![]() представляет собой набор управлений uс
и и3
.
представляет собой набор управлений uс
и и3
.
Замечание. В задаче 1 не рассматривался вопрос о том, что происходит с оборудованием после п лет его эксплуатации. Можно предположить, что п неограниченно велико и, рассматривая процесс для достаточно большого значения п, получить закономерность в оптимальном управлении в виде периодически повторяющихся циклов замены и использования старого оборудования, (такой пример будет рассмотрен ниже). Можно также предположить, что после л лет использования оборудование продается и ликвидная стоимость присоединяется к общей прибыли. Во втором случае уравнения (6.4) принимают вид
![]() (6.6)
(6.6)
Рассмотрим некоторую модификацию задачи 1.
Задача 2. В задаче 1 предположим, что ежегодные затраты на эксплуатацию, ликвидная и начальная стоимость зависят не только от возраста оборудования t, но и от времени, прошедшего с начала процесса. Пусть rh
{t)—затраты на эксплуатацию в течение k-гoгода, если со времени последней замены прошло tлет; ![]() —ликвидная стоимость оборудования возрастав лет, если оно продается в начале k-гoгода; рk
— начальная стоимость оборудования, если оно куплено в начале k-гoгода.
—ликвидная стоимость оборудования возрастав лет, если оно продается в начале k-гoгода; рk
— начальная стоимость оборудования, если оно куплено в начале k-гoгода.
Требуется определить оптимальные сроки замены старого оборудования новым в течение п лет с тем, чтобы минимизировать затраты на его содержание.
Показатель эффективности в данной задаче — суммарные затраты на эксплуатацию оборудования. Затраты на k-м шаге, как и прежде, зависят от выбранного управления. При управлении иk
= ис
эти затраты равны ![]() , а при управлении иk
=u3
составляют
, а при управлении иk
=u3
составляют ![]()
![]()
Пусть Zk *{t)—условные минимальные затраты за n—k+1 шагов с k-гoпо n-й включительно, если к началу k-гoшага возраст оборудования составлял tлет, при условии, что был выбран оптимальный режим эксплуатации.
Рекуррентные соотношения для Zk *{t) имеют вид
 (6.7)
(6.7)
Для n-го шага соответственно получим
![]() (6.8)
(6.8)
Вычислительный процесс строится как и в предыдущей задаче.
Введение в условие задачи функций, оценивающих затраты, выпуск продукции и стоимость, зависящие не только от возраста t, но и непосредственно от k, т. е. от времени, прошедшего с начала процесса, является косвенным способом учета технического прогресса.
Как уже отмечалось неоднократно, модели ДП очень гибки и в смысле возможностей анализа чувствительности к вариации исходных данных, и в смысле возможностей включения в модель различных модификаций задачи. Так, например, аналогичная модель может быть построена для задач, в которых ежегодно рассматривается более двух вариантов управления («сохранение», «замена», «реконструкция» и т. д.). Можно рассматривать задачи, в которых затраты или прибыль зависят не только от возраста оборудования, но и еще от одного параметра, например, времени, прошедшего после восстановительного ремонта, и т. д.
Замечание. Если функции затрат, ликвидная и начальная стоимости в задаче 2 зависят от времени , прошедшего с начала эксплуатационного периода, и не совпадает с k, то состояние системы следует характеризовать двумя параметрами и t.
В заключение главы рассмотрим задачу определения оптимальной стратегии замены оборудования при бесконечном плановом периоде.
Задача 3. Определить оптимальные сроки замены оборудования при неограниченном времени его использования, если известны: р — начальная стоимость; r(t) — эксплуатационные затраты на содержание оборудования возраста tлет в течение ближайшего года; ![]() —ликвидная стоимость оборудования возраста tлет.
—ликвидная стоимость оборудования возраста tлет.
В задаче будем минимизировать затраты. Параметр состояния есть время: ![]() . Процесс, является бесконечным, поэтому условные минимальные затраты
. Процесс, является бесконечным, поэтому условные минимальные затраты ![]() за все последующее время, начиная с k-гoгода, зависят только от
за все последующее время, начиная с k-гoгода, зависят только от ![]() и не зависят от k.
и не зависят от k.
При рассмотрении бесконечного процесса необходимо ввести так называемый дисконтирующий множитель 01, позволяющий привести сумму в последующий момент времени к настоящему моменту с учетом ежегодного роста по правилу сложных процентов. Если имеется первоначальная сумма а руб., то через п лет она составит, при процентной ставке р%, сумму ![]() руб. Наоборот, конечную сумму а руб. через п лет можно получить от первоначальной суммы
руб. Наоборот, конечную сумму а руб. через п лет можно получить от первоначальной суммы ![]() руб. Множитель
руб. Множитель ![]() называется коэффициентом дисконтирования.
называется коэффициентом дисконтирования.
Учитывая этот множитель и повторяя весь ход рассуждений, изложенный в предыдущих задачах, получим следующие функциональные уравнения:
 (6.9)
(6.9)
Поскольку конечного шага нет, обратный ход выпол-. нить нельзя, поэтому решим уравнения явно следующим образом.
Для 1-го шага имеем ![]() , поэтому
, поэтому
![]()
Так как ![]() то выражение, стоящее в первой строке, всегда не больше выражения во второй строке. Поэтому
то выражение, стоящее в первой строке, всегда не больше выражения во второй строке. Поэтому ![]() , что соответствует сохранению оборудования.
, что соответствует сохранению оборудования.
Пусть оптимальным является решение о сохранении для первых N шагов и о замене на (N+1)-м шаге. Задача состоит в определении этого числа N. Запишем последовательность рекуррентных соотношений для этих N шагов:
Исключив из этих равенств последовательно Z*(2),Z*(3), … получим
![]() (6.10)
(6.10)
Но для (N+ 1)-го шага по предположению оптимальным является решение о замене оборудования, следовательно,
Подставляя значение Z*(N) в равенство (6.10) и разрешая полученное при этом уравнение относительно Z*(0), найдем
 (6.11)
(6.11)
Величина Z*(0) равна необходимому минимуму затрат на весь процесс. Теперь, полагая последовательно N= 1, 2, 3, .... вычисляем значение Z*(0) и находим среди них наименьшее.
Заключение
В данной курсовой работе рассмотрены виды математических моделей, используемых в экономике и менеджменте, а также их классификация.
Особое внимание в курсовой работе уделено оптимизационному моделированию.
Изучен принцип построения моделей линейного программирования, также приведены модели следующих задач:
· Задача о раскрое материалов;
· Задача выбора оптимальной производственной программы предприятия;
· Задача о диете;
· Транспортная задача.
В работе представлены общие характеристики задач дискретного программирования, описан принцип оптимальности и уравнение Беллмана, приведено общее описание процесса моделирования.
Для построения моделей выбраны три задачи:
· Задача оптимального распределения ресурсов;
· Задача об оптимальном управлении запасами;
· Задача о замене.
В свою очередь для каждой из задач построены различные модели динамического программирования. Для отдельных задач приведены числовые расчеты, в соответствии с построенными моделями.
Список литературы:
1. Вавилов В.А., Змеев О.А., Змеева Е.Е. Электронное пособие “Исследование операций”
2. Калихман И.Л., Войтенко М.А. “Динамическое программирование в примерах и задачах”, Москва ”Высшая школа”, 1979
3. Косоруков О.А., Мищенко А.В. “Исследование операций”, Москва, 2003
4. Материалы из сети Internet.