Классификация промышленных роботов
СОДЕРЖАНИЕ: Санкт-Петербургский государственный политехнический университет Факультет при ЦНИИ РТК. Отчет по дисциплине: Проектирование сложных систем. Тема: Классификация промышленных роботов.Санкт-Петербургский государственный политехнический университет
Факультет при ЦНИИ РТК.
Отчет по дисциплине: Проектирование сложных систем.
Тема: Классификация промышленных роботов.
Работу выполнила:
студентка гр. 4174/1 Гордиенко Д.А.
Работу проверил:
Зав. Кафедрой ИКТП Голландцев Ю.А.
Санкт-Петербург
2010 г
Типы промышленных роботов:
1. Промышленный робот прямоугольной системы координат.
2. Промышленный робот цилиндрической системы координат.
3. Промышленный робот сферической системы координат.
4. Промышленный робот угловой системы координат .
5. Промышленный робот смешанной системы координат .
1)Прямоугольная система координат.
В прямоугольной (декартовой) системе координат звенья механической системы имеют прямолинейные перемещения по трем (или двум - при плоской системе) взаимно перпендикулярным осям X, Y, Z. Рабочая зона промышленных роботов имеет форму прямоугольника или параллелепипеда
Modular Robot (фирма Sciaky )
Предназначен для комплектации поточных линий сварки при массовом производстве автомобильных кузовов.
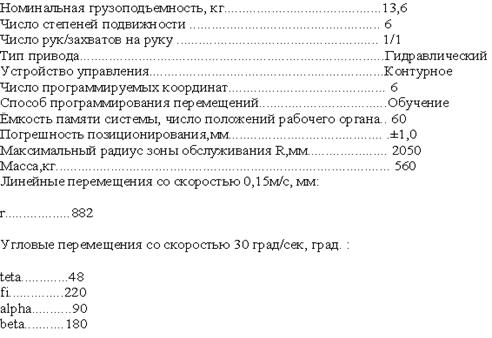
Паспортные данные
Кинематическая схема робота
Для приведения реальной кинематической схемы робота к расчетной,
исключаем из рассмотрения перемещения, связанные с ориентирующими движениями захвата, т.е. замораживаем угловые перемещения.
Проведем расчет ускорений по формулам:

| Параметры | 1 | 2 | 3 | |||
| qimin | 0,60 | м | 1,00 | м | 0,70 | м |
| qimax | 1,40 | м | 1,80 | м | 1,90 | м |
| q`imax | 0,50 | м/c | 0,42 | м/c | 0,33 | м/c |
| КТР | 0,10 | 0,10 | 0,10 | |||
| q``imax | 2,00 | м/с2 | 1,41 | м/с2 | 1,31 | м/с2 |
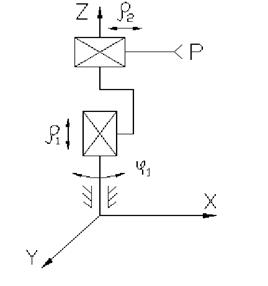
2)Цилиндрическая система координат
Цилиндрическая система координат характеризуется перемещением рабочего органа промышленного робота в основной координатной плоскости в направлениях r и , а также по координате Z. Рабочая зона в этом случае имеет форму цилиндра, размеры H, L и угол определяют ее параметры.
AL-400S
Паспортные данные:
Механизм осуществления перемещения по координатам:
1: Поворот колонны осуществляется двумя пневматическим цилиндром через пару цепных передач, работающих параллельно.
1: Каретка, несущая выдвижную руку, перемещается в вертикальном направлении по основной направляющей, установленной внутри поворотной колонны. Дополнительными направляющими являются штоки двух пневматическим цилиндром, на которых жестко закреплена каретка.
2: Выдвижение руки осуществляется пневматическим цилиндром по направляющей, которой является шток цилиндра, на котором жестко закреплена кисть робота.
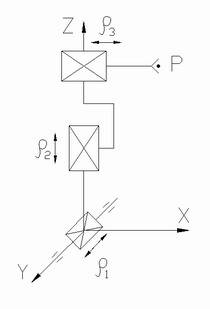
Кинематическая схема робота
Для приведения реальной кинематической схемы робота к расчетной исключаем из рассмотрения перемещения, связанные с ориентирующими движениями захвата. Т.е. не учитываем при кинематическом расчете перемещение по координатам , .
Проведем расчет ускорений по формулам:

| Параметры | 1 | 2 | 3 | |||
| qimin | -1,05 | рад | 0,90 | м | 0,50 | м |
| qimax | 1,05 | рад | 1,05 | м | 0,80 | м |
| q`imax | 1,05 | рад/c | 0,50 | м/c | 0,50 | м/c |
| КТР | 0,20 | 0,30 | 0,20 | |||
| q``imax | 2,63 | рад/с2 | 5,56 | м/с2 | 4,17 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата
=(0.5![]() 1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
mоснования
=(0.2![]() 0.5)M
mi
=dSl
0.5)M
mi
=dSl
mориент
=n*mгр
(0.5![]() 1.5)Mr
=m1
+m2
+m3
+ mоснования
1.5)Mr
=m1
+m2
+m3
+ mоснования
![]() =
=![]() d=7800кг/м3
d=7800кг/м3
| mгруза | 5 | кг | mсхвата | 5 | кг |
| M | 250 | кг | mоснования | 50 | кг |
| n | 0 | mориент | 0 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l (м) | 0.5 | 0.42 | 0.48 |
| Kзаполнения
=(0.1 |
0.1 | 0.2 | 0.2 |
| Sсеч (м2 ) | 0.2 | 0.05 | 0.016 |
| mi (кг) | 156 | 32.7 | 19.8 |
Mr =258.6кг
![]()
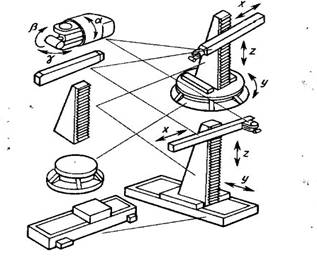
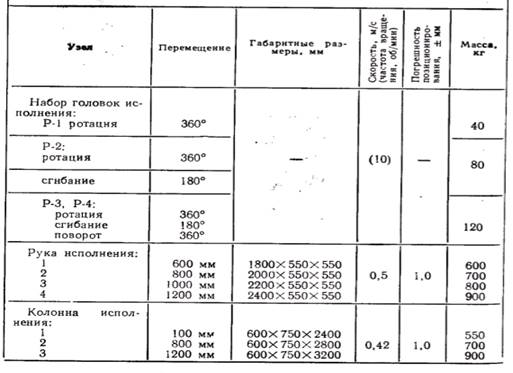
3) Сферическая система координат.
Сферическая система координат характеризуется перемещением рабочего органа в точку пространства за счет перемещений по радиус-вектору r и угловым перемещениям и в двух взаимно перпендикулярных плоскостях. Рабочая зона промышленного робота имеет в этом случае форму шара.
Robot welder
Сфера применения: сварочные работы .
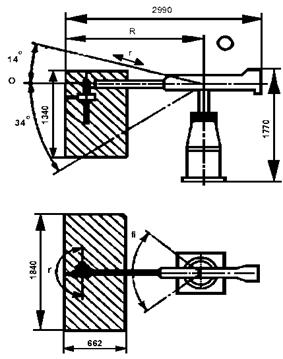
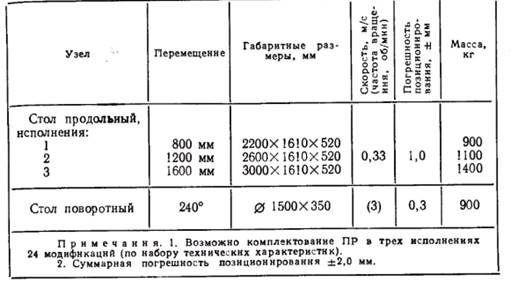
Паспортные данные
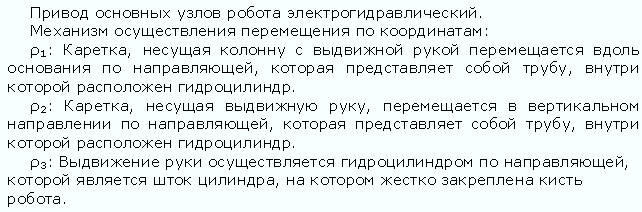
Механизм осуществления перемещения по координатам:
1: Поворот колонны осуществляется за счет преобразования прямолинейного движения гидропривода во вращательной движение поворотного зубчатого колеса с помощью реечной передачи.
2: Движение от гидроусилителя передается через коническую передачу на винт шариковинтовой передачи. Перемещение руки в вертикальной плоскости осуществляется за счет поступательного движения вдоль оси винта гайки, шарнирно связанной с кронштейном, установленном на нижней плоскости корпуса руки
1: Выдвижение руки осуществляется гидроцилиндром по направляющей, которой является шток цилиндра, на котором жестко закреплена кисть робота.
Кинематическая схема робота
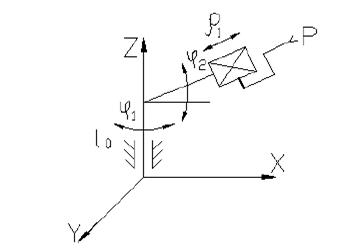
Проведем расчет ускорений по формулам:

| Параметры | 1 | ф2 | 1 | |||
| qimin | -1,90 | рад | -0,24 | рад | 1,00 | м |
| qimax | 1,90 | рад | 0,59 | рад | 1,88 | м |
| q`imax | 0,52 | рад/c | 0,52 | рад/c | 0,15 | м/c |
| КТР | 0,10 | 0,20 | 0,10 | |||
| q``imax | 0,71 | рад/с2 | 1,63 | рад/с2 | 0,26 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата
=(0.5![]() 1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
mоснования
=(0.3![]() 0.5)M
mi
=dSl
* kзап= dSl
(0.1
0.5)M
mi
=dSl
* kзап= dSl
(0.1![]() 0.5)
0.5)
mориент
=n*mгр
(0.5![]() 1.5)Mr
=m1
+m2
+m3
+ mоснования
1.5)Mr
=m1
+m2
+m3
+ mоснования
![]() =
=![]()
| mгруза | 13.6 | кг | mсхвата | 10.88 | кг |
| M | 560 | кг | mоснования | 140 | кг |
| n | 2 | mориент | 27.2 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l (м) | 1.34 | 1 | 1.4 |
| Kзаполнения
=(0.1 |
0.2 | 0.3 | 0.25 |
| Sсеч (м2 ) | 0.01 | 0.05 | 0.04 |
| mi (кг) | 256.4 | 117 | 60.3 |
Mr =573.6кг
![]()
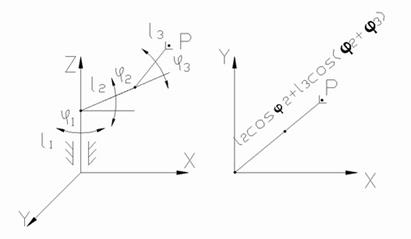
4)Угловая система координат
Угловая плоская или пространственная (цилиндрическая и сферическая) система координат характерна для движения многозвенных шарнирных рук ПР. Объект манипулирования перемещается в направлении радиус-вектора r за счет относительных угловых поворотов звеньев руки, имеющий постоянную длину.
Vertical-80
Сферы применения: точечная сварка
Паспортные данные
Кинематическая схема робота.
Чтобы привести данный робот к расчетной кинематической схеме, можно заморозить ориентирующие степени подвижности А, В, С. Тогда робот можно рассматривать как робот в угловой системе координат.
Проведем расчет ускорений по формулам:

| Параметры | 1 | ф2 | ф3 | |||
| qimin | -2,35 | рад | -0,26 | рад | -2,35 | рад |
| qimax | 2,35 | рад | 1,83 | рад | 2,35 | рад |
| q`imax | 1,00 | рад/c | 1,00 | рад/c | 1,00 | рад/c |
| КТР | 0,20 | 0,30 | 0,20 | |||
| q``imax | 1,06 | рад/с2 | 1,59 | рад/с2 | 1,06 | рад/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата
=(0.5![]() 1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
mоснования
=(0.3![]() 0.5)M
mi
=dSl
* kзап= dSl
(0.1
0.5)M
mi
=dSl
* kзап= dSl
(0.1![]() 0.5)
0.5)
mориент
=n*mгр
(0.5![]() 1.5)Mr
=m1
+m2
+m3
+ mоснования
1.5)Mr
=m1
+m2
+m3
+ mоснования
![]() =
=![]()
| mгруза | 80 | кг | mсхвата | 64 | кг |
| M | 1750 | кг | mоснования | 700 | кг |
| n | 2 | mориент | 96 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l (м) | 0.3 | 0.3 | 0.17 |
| Kзаполнения
=(0.1 |
0.25 | 0.3 | 0.4 |
| Sсеч (м2 ) | 0.014 | 0.014 | 0.05 |
| mi (кг) | 485 | 330.6 | 344.4 |
Mr =1863 кг
![]()
5)Смешенная система координат
Роботы этого класса обладают, как правило, малой грузоподъемностью и высокой точностью позиционирования. Используются для автоматизации сборочных операций, распределения наполнителей, в «чистых» производствах.
Toshiba SR-854HSP
Широкое применение на операциях сборки, перемещения, упаковки, обслуживания конвейеров в различных отраслях промышленности.

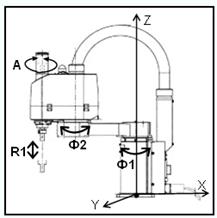
Движение по координате Ф1 и Ф2 осуществляется за счет исполнительного электродвигателя, присоединенного соосно с осью вращения через планетарный редуктор, который обеспечивает высокое передаточное число и высокую точность, при малых габаритах.
Перемещение захвата по (изменение координаты R1) происходит за счет пневмоцилиндра, давление необходимое для работы цилиндра подводится извне, вместе с электрическими линиями.
Кинематическая схема робота.
Чтобы привести данный робот к расчетной кинематической схеме, можно заморозить ориентирующую степень подвижности А. Тогда робот можно рассматривать как робот в смешанной системе координат.

Проведем расчет ускорений по формулам:

| Параметры | 1 | ф2 | 1 | |||
| qimin | -2,27 | рад | -2,44 | рад | 0,10 | м |
| qimax | 2,27 | рад | 2,44 | рад | 0,40 | м |
| q`imax | 4,71 | рад/c | 5,57 | рад/c | 1,10 | м/c |
| КТР | 0,80 | 0,90 | 0,60 | |||
| q``imax | 6,11 | рад/с2 | 7,37 | рад/с2 | 6,72 | м/с2 |
Проведем расчет массы звеньев по следующим формулам.
mсхвата
=(0.5![]() 1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
1.5)mгр
m3
=m3
’
+ mориент+
mсхвата+
mгруза
mоснования
=(0.3![]() 0.5)M
mi
=dSl
* kзап= dSl
(0.1
0.5)M
mi
=dSl
* kзап= dSl
(0.1![]() 0.5)
0.5)
mориент
=n*mгр
(0.5![]() 1.5)Mr
=m1
+m2
+m3
+ mоснования
1.5)Mr
=m1
+m2
+m3
+ mоснования
![]() =
=![]()
| mгруза | 6 | кг | mсхвата | 3 | кг |
| M | 70 | кг | mоснования | 21 | кг |
| n | 3 | mориент | 9 | кг |
| Параметры | 1 звено | 2 звено | 3 звено |
| l (м) | 0.3 | 0.55 | 0.85 |
| Kзаполнения
=(0.1 |
0.2 | 0.2 | 0.2 |
| Sсеч (м2 ) | 0.04 | 0.02 | 0.004 |
| mi (кг) | 16.5 | 12.87 | 23 |
1
Mr =73.6 кг
![]()