Компоненти та функції сучасних транспортно-навігаційних глобальних інформаційних систем ГІС. Супутникові радіонавігаційні системи СРНС для менеджменту
СОДЕРЖАНИЕ: Призначення бортових навігаційних комплексів для GPS-навігації наземних транспортних засобів. Типові види електронних навігаційних карт. Інтелектуальні транспортні системи. Супутникові радіонавігаційні системи СРНС для менеджменту та їх характеристика.Зміст
Вступ. 3
1. Компоненти та функції сучасних транспортно-навігаційних глобальних інформаційних систем ГІС.. 4
2. Супутникові радіонавігаційні системи СРНС для менеджменту. 8
Висновки. 17
Список використаної літератури. 19
Вступ
У сучасній інфраструктурі дорожнього руху дедалі важливішу роль відіграють геоінформаційні та GPS_технології, які уже сьогодні дають можливість забезпечити безпосередніх учасників дорожнього руху та всі ланки керування транспортними системами необхідною оперативною і якісною просторово-часовою інформацією. Глобальна супутникова система позиціювання Навстар (NAVSTAR – Navigation Satellite Providing Time And Range) або коротко – GPS (Global Positioning System) дозволяє оперативно визначати координати місцеположення рухомих обєктів практично в будь-якій точці земної кулі та в будь-який час, а геоінформаційні системи (ГІС) забезпечують відображення місцезнаходження обєктів на електронних картах, моделювання та планування транспортних потоків, моніторинг стану транспортних систем в просторі та часі.
На основі GPS, ГІС, сучасних засобів звязку і телекомунікацій у розвинених країнах світу уже протягом декількох десятків років створюються та розвиваються інтелектуальні транспортні системи (ІТС) [1, 2]. Вони використовуються як засоби контролю і впливу на систему наземного транспорту, наприклад, менеджерів шляхом прямого керування (сигналами регулювання трафіку або опосередковано через оперативні повідомлення учасників руху про стан транспортних шляхів та їх завантаженість, у тому числі з використанням засобів мобільного звязку та Інтернет).
Компоненти та функції сучасних транспортно-навігаційних глобальних інформаційних систем ГІС
Бортові навігаційні комплекси призначені для GPS-навігації наземних транспортних засобів та комплектуються різними компонентами: GPS-приймач або інтегрована платформа (GPS-приймач та інерціальна система) для визначення координат місцезнаходження транспортного засобу, напрямку та швидкості його руху; бортовий мікрокомпютер з ГІС для програмування маршруту та інформаційного супроводження водія під час руху транспортного засобу за вибраним маршрутом; мобільні засоби звязку (мобільний телефон або мінірадіостанція та радіомодем) для обміну даними з диспетчерським центром або іншими сервісними службами транспортної системи тощо. У найпростішому застосуванні засобів GPS-навігації водій міжміського вантажного трейлера чи автомашина менеджеру, може, маючи мініатюрну антену та GPS_приймач з цифровим дисплеєм навігаційного приладу розміром записничка, визначати координати свого місцезнаходження з точністю до 15 м.
Інтегрування GPS-приймачів з бортовим компютером, оснащеним програмними засобами геоінформаційної системи, дає можливість відображати місцезнаходження рухомих обєктів на електронній карті, прокладати маршрут руху, постійно слідкувати за координатами рухомого обєкта та видавати на екран дисплея або голосом рекомендації щодо можливих маневрів для оптимального руху по вибраному маршруту. На електронні карти країн Європейського Союзу, США та Канади занесено 99 % усіх вулиць і провулків, адреси, обєкти дорожньої інфраструктури та соціально-побутового обслуговування. Автомобільні ГІС пропонують для вибору мови інтерфейсу – серед них зазвичай дві англійські (британська і США), угорська, польська (російської та української, на жаль, поки що не пропонують). Можна також вибрати голосовий супровід як на різних мовах, так і різним голосом (чоловічим або жіночим – на вибір).
Електронні карти на дисплеї бортового компютера формуються як у класичному, так і в 3D-вигляді (рис. 1.1), що дуже зручно при русі на транспортних розвязках.

Рис. 1.1. Типові види електронних навігаційних карт на дисплеї автомобільної ГІС
Перемальовування і масштабування карт відбувається досить швидко. Доступні різнокольорові схеми дорожньої інфраструктури. Це дуже важливо, тому що в різних країнах прийняті різні системи дорожніх позначень, отже можна встановити ту схему, яка є звичною для водія, або яка найбільш оптимальна для даної країни.
ГІС автоматизує прокладання маршруту, для цього достатньо вказати кінцеву точку подорожі і ГІС негайно розрахує оптимальний шлях. При відхиленнях від маршруту (наприклад, менеджер проскочив поворот або розвязку) система досить швидко перерахує маршрут і почне супроводжувати рух по новому маршруту. При цьому вона не забуває завчасно попереджати про необхідні маневри, світлофори, повороти і т. ін. Велика база геопросторових даних дає змогу шукати обєкти як за адресою, так і за їх функціональною приналежністю. У будь-який момент можна дати команду Navigate to Point of Interest та вибрати потрібну адресу або один з кількох десятків категорій обєктів, таких, як заправні станції, пункти автосервісу, готелі, лікарні, аптеки, магазини тощо. Після цього потрібно вибрати із списку пропонованих конкретний обєкт (точку) інтересу, а ГІС виведе водія безпосередньо на потрібне місце. Програма також дає можливість отримувати з Інтернет в режимі on_line інформацію про погоду, про пробки і затори на дорогах. В цілому ж можна сказати, що навігаційні ГІС є незамінними помічниками менеджерів-автомобілістів (якщо вони подорожують по Західній Європі, США або Канаді).
Інтелектуальні транспортні системи зявилися не так давно, але розвиток їх концепцій можна прослідкувати починаючи з 70-х років минулого століття, на які припадає період розвитку перших ІТС в Японії. У США термін інтелектуальні транспортні магістральні системи (Intelligent Vehicle Highway System – IVHS ), який використовувався у 1980 рр., починаючи з 1994 р. був замінений на інтелектуальні транспортні системи (Intelligent Transportation Systems – ITS ). У країнах Західної Європи ця предметна сфера з 1980-х років відома як дорожньо-транспортна інформатика (Road Transport Informatics – RTI ). Згодом зявилося поняття прогресивна транспортна телематика (Advanced Transport Telematics – ATT ) (телематика – інтегровані засоби передавання та оброблення інформації для транспортних систем). У 90_х роках минулого століття вирішення проблеми ІТС набуває комплексного програмного характеру з організацією спеціальних національних та міжнародних структур, таких, як Товариство інформації транспортних засобів, шляхів і дорожнього руху (Vehicle , Road and Traffic Information Society – VERTIS ) в Японії, програма ІТС_Америка в США та Європейська організація з координації впровадження дорожньої телематики (European Road Telematics Implementation Coordination Organization – ERTICO ) у Європі. Міністерство транспорту США спонсорувало сотні проектів, спрямованих на дослідження, розробку, тестування та впровадження новітніх технологій у національній ІТС. Товариство ІТС-Америка обєднує державні й місцеві органи влади, громадські спілки, університети і науково-дослідні інститути, виробників і комерційних реалізаторів автомобілів, консалтингові фірми, тощо. Міністерство спонсорує симпозіуми і конференції з питань ІТС для обміну новими ідеями і досвідом. Значна увага приділяється стандартизації засобів та протоколів обміну даними для забезпечення інтегрування всіх компонентів системи. Незважаючи на певні відмінності в стратегіях розвитку інформаційних транспортних систем Японії, країн Західної Європи та США в їх архітектурі та функціях є багато спільного. До типової можна віднести архітектуру ІТС США, в якій виділено чотири підсистеми: перевізник, транспортний засіб, дорога та центр управління. Функціонально система забезпечує задачі планування, диспетчеризацію вантажоперевезень наземним транспортом, управління парком автомобілів, організацію руху транспорту, охорону вантажів і водіїв, захист від викрадення і повернення викрадених автомобілів, моніторинг рухомих обєктів, тощо.
Вона зорієнтована на інформаційне забезпечення усіх субєктів сучасних транспортних комунікацій: власники вантажу (вантажовідправники), автотранспортні підприємства, водії, менеджери страхових компаній, екологічні та санітарні інспекції тощо. Базовою компонентою більшості систем диспетчеризації транспортом є система автоматизованого місцезнаходження транспортного засобу – АМТЗ (Automatic Vehicle Location – AVL ). Система АМТЗ надає можливість диспетчерському центру у реальному масштабі часу слідкувати за місцезнаходженням та графіком руху транспортних засобів, оперативно контролювати виконання завдання та при необхідності перерозподіляти їх на різних маршрутах і напрямах, надавати при необхідності технічну, медичну або іншу допомогу.
Супутникові радіонавігаційні системи СРНС для менеджменту
Інтерес до СРНС викликаний їх універсальністю. У рамках однієї системи можливе рішення великого комплексу різних задач.
Найбільш перспективними є СРНС NAVSTAR (США) і ГЛОНАСС (Росія).
На сучасному етапі інтенсивно обговорюються перспективи створення інших супутникових систем типу GPS: Глобальна європейська геостаціонарна система (EGNOSS) та GALILEO. Асоціація європейських авіакомпаній (АЕА) виправдали користь останньої системи, рахуючи EGNOSS занадто дорогою у порівнянні з її характеристиками [3].
На навколоземних орбітах знаходиться 24 штучних супутників Землі (ІСЗ) системи NAVSTAR. Це дозволяє на протязі доби вести безперервні навігаційні визначення транспортних об’єктів, наприклад, менеджерів.
У системі ГЛОНАСС на навколоземних орбітах в робочому стані зі 18 ІСЗ знаходяться (за різними джерелами) від 12 до 14 ІСЗ.
В Україні, як і в країнах членах НАТО, Японії, РФ інтенсивно ведуться роботи щодо створення апаратури користувачів (АК), яка приймає сигнали СРНС NAVSTAR і ГЛОНАСС геодезичної і навігаційної точності. Апаратура СРНС може встановлюватися на різні типи рухомих обєктів і застосовуватись в носимому варіанті.
Наведемо приклад цієї апаратури.
Мінімальна конфігурація мобільної системи картографування (МСК) складається з трьох блоків (рис.2.1): інтегрованої навігаційної платформи, стереофотограмметричної системи та блоку управління.
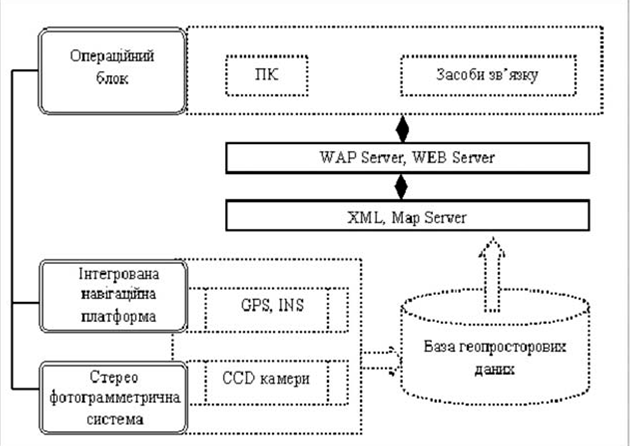
Рис.2.1.
Інтегрована навігаційна платформа забезпечує визначення глобальних координат МСК і складається з GPS-приймача та інтегрованої навігаційної системи (INS). Останнім часом GPS-координування рухомих транспортних засобів при мобільному картографуванні виконують в диференціальному режимі (DGPS) з наступним постпроцесорним обробленням або в кінематичному режимі реального часу (Real Time Kinematics – RTK ), що крім встановлення базової станції GPS вимагає організації звязку для передачі диференційної поправки на рухомий обєкт. Використання такої інтегрованої платформи має багато переваг.
Стереофотограмметрична система оснащується кількома парами кольорових цифрових відеокамер (CCD-камери). Зазвичай одна пара камер орієнтується вперед по напрямку руху, інша пара камер – праворуч. Таким чином, під час руху МСК забезпечується автоматизоване стереофотограмметричне знімання обєктів дорожньої інфраструктури. Очевидно, що знімання всіх обєктів дорожньої інфраструктури мобільною системою картографування можливе, якщо виконати його в прямому та зворотному напрямках. Таке стереофотограмметричне знімання достатнє для визначення просторових XYZ_координат.
Блок управління мобільної системи картографування записує DGPS -вимірювання та стереопари зображень, виконаних CCD_камерами, формує базу цифрових знімків для подальшої обробки.
У табл. 2.1. приведені фірми виробники, тип і ТТХ апаратури користувачів США, РФ, України.
Потреба в оперативній високоточній навігації сухопутних, морських, повітряних обєктів обумовила створення в 80-90-ті роки середньоорбітальних СРНС GPS NAVSTAR у США і ГЛОНАСС в Росії.
Основне призначення супутникових радіонавігаційних систем другого покоління - глобальна, оперативна навігація сухопутних, морських, повітряних обєктів, забезпечення можливості в будь-якій точці земної поверхні, у будь-який час року і доби, за будь-якої погоди визначити (уточнити) параметри рухомого обєкту - три координати і три складові вектора швидкості.
Принципи побудови СРНС NAVSTAR (США) і ГЛОНАСС (Росія) в загальних рисах ідентичні, але відрізняються технічним виконанням підсистем. Апаратура користувачів випускається в кількості сотень найменувань десятками фірм різних країн. Глобальна супутникова система позиціювання Навстар (NAVSTAR – Navigation Satellite Providing Time And Range) або коротко – GPS (Global Positioning System) дозволяє оперативно визначати координати місцеположення рухомих обєктів практично в будь_якій точці земної кулі та в будь_який час, а геоінформаційні системи (ГІС) забезпечують відображення місцезнаходження обєктів на електронних картах, моделювання та планування транспортних потоків, моніторинг стану транспортних систем в просторі та часі.
В автономному режимі (коли апаратура користувачів приймає тільки сигнали від супутників робочого сузіря) можна виділити два рівні точності:
а) відкритий канал (S/А - код) для цивільних користувачів (з навмисним пониженням точності НІ) - 100м (![]() ,GPS);
,GPS);
б) закритий канал (Р - код) для військових користувачів - 16м (![]() ). Зазначимо, що в системі ГЛОНАСС точність відкритого каналу в 2.5 рази вище, ніж в GPS.
). Зазначимо, що в системі ГЛОНАСС точність відкритого каналу в 2.5 рази вище, ніж в GPS.
Вказаний ряд точності відноситься лише до апаратури користувачів навігаційного призначення. АК геодезичного призначення здатна визначати прямокутні координати точки на земній поверхні з похибками в межах від кількох метрів до кількох міліметрів.
Таблиця 2.1
Тактико-технічні характеристики супутникових радіонавігаційних систем
| Фірма, найменування апаратури | Тип АК, призначення | Тип сигналу коди | Кількість каналів | Похибка, м |
| 1. Rockwell Collins |
ТТI-5, військова, цивільна | Р-код С/А-код |
5 1 |
15(СВП) 25(СВП) |
| 2. Texas Instruments | TI-4100, військова, цивільна | Р-код С/А-код |
1 1 |
14(СВП) 5(Диф. Реж.) |
| 3. EDO | Для навігації суден | Р-код С/А-код |
1 1 |
20(КВП) |
| 4. Rockwell Collins | Військова, цивільна | Р-код С/А-код |
1 1 |
15(СВП) 25(СВП) |
| 5. Російський інститут навігації і часу | IТ-129 | С/А-код ПТ-код |
4 1 |
30(СВП) 1-5 в диф. режимі |
| 6. Завод радіоприладів Орізон-Навігація (м. Сміла) | СН3001 військова | ПТ-код | 1 | 30(СКП) 1-5 в диф. режимі |
| 7. ГЛОНАСС, Роскосмос | Військова, цивільна | Р-код С/А-код |
4 | 20(СВП) 1-5 в диф. режимі |
Російська система ГЛОНАСС відстає від американської лише в деяких сегментах. Можна говорити, що від російської системи відстають європейці із системою Галілео, її створення затяглося на вісім років. Ще більше відстають у цій області китайці. Російська система ГЛОНАСС росте і вже працює не тільки на території Росії, але і за межами, що довели останні перельоти в Антарктиду, що виконувалися з використанням системи ГЛОНАСС. ГЛОНАСС довів, що система працює в Південній Африці й Антарктиді.
На сьогоднішній день у складі угруповання ГЛОНАСС знаходяться 18 космічних апаратів. З них 14 використовуються по цільовому призначенню, а чотири знаходяться на техобслуговуванні.
ГЛОНАСС (глобальна навігаційна супутникова система) - система подвійного призначення, що забезпечує рішення задач в інтересах Міноборони РФ і цивільних споживачів. Орбітальне угруповання ГЛОНАСС призначене для надання послуг супутникової навігації необмеженому числу вітчизняних і закордонних користувачів наземного, морського, повітряного і космічного базування. Завдяки ГЛОНАСС за допомогою портативних супутникових приборів-навігаторів можна буде визначати місце розташування, швидкість рух обєктів і людей з точністю до метра. У травні 2007 року Президент Росії Володимир Путин підписав Указ Про використання глобальної навігаційної супутникової системи ГЛОНАСС в інтересах соціально-економічного розвитку Російської Федерації.
Відповідно до документа, доступ до цивільних навігаційних сигналів системи ГЛОНАСС повинний бути наданий російським і іноземним споживачам на безоплатній основі і без обмежень. Для забезпечення безпеки Росії апаратура супутникової навігації, що здобувається для нестатків федеральних органів виконавчої влади РФ і підвідомчих їм організацій, повинна функціонувати з використанням сигналів системи ГЛОНАСС. Органам виконавчої влади субєктів РФ, органам місцевого самоврядування муніципальних утворень і організаціям незалежно від їхньої організаційно-правової форми рекомендовано застосовувати апаратуру супутникової навігації, що функціонує з використанням сигналів системи ГЛОНАСС.
25 грудня 2007 року з Байконуру були запущені ще 3 космічних апарати системи ГЛОНАСС. Таким чином, їхня загальна кількість на орбіті досягла 18. Саме така кількість супутників було потрібно для покриття системою ГЛОНАСС усієї території Росії. До кінця 2009 року на орбіті, як передбачається, будуть працювати 24 супутника ГЛОНАСС, і тоді її послугами можна буде скористатися по усьому світі.
Функціональні доповнення системи ГЛОНАСС включають системи моніторингу, системи диференціальної корекції і так називані беззапитальні технології.
Згідно новим ТТХ ГЛОНАСС, системи моніторингу забезпечують можливість, протягом 10 секунд розпізнати ознаки невірогідності даних, що надходять від маяку апарата, з яким відбулися якісь неполадки.
А диференціальні коригувальні станції і системи на їхній основі, дозволяють одержувати підвищену - сантиметрову чи міліметрову - точність, що необхідна для моніторингу інженерних споруджень, веж, мостів, залізниць. Це забезпечує десятикратне зростання продуктивності праці в деяких галузях, а також можливість використання фахівців не найвищої кваліфікації.
Підвищення точності сигналу забезпечують також нові сучасні без запитальні технології керування КА.
Такі системи уже вводяться в наземну інфраструктуру ГЛОНАСС. Зокрема, за рік удалося забезпечити дворазове збільшення точності сигналів. Для різних споживачів потрібні різні якості системи - комусь важлива приступність, комусь цілісність, комусь підвищена точність. Усе це забезпечують надлишкова кількість апаратів в угрупованні і функціональні доповнення.
Сьогодні точносні параметри ГЛОНАСС трохи грубіше, ніж у GPS США. Але, по-перше, у системи ГЛОНАСС менше апаратів - 18, а не 30, як в орбітальному угрупованні GPS США. По-друге, у системи ГЛОНАСС менш розвинуті наземні засоби.
Наприкінці 2007 року в систему ГЛОНАСС була введена без запитальна технологія роботи з апаратами - не через керуючий центр, а по окремим станціям. У два рази підвищилася точність. В даний час погрішність системи ГЛОНАСС у плані складає 14 метрів, а по вертикалі - 21 метр при імовірності 95%.
Поетапна реалізація ФЦП повинна наблизити до 2011 року ГЛОНАСС до американського GPS.
Разом з тим ГЛОНАСС має масу переваг. Це, по-перше, частотний поділ сигналів, що є тільки в системі ГЛОНАСС. По-друге, ближче до полюсів російські супутники краще видні - висота орбіти 19100 км, що нижче, чим в американців на 900 км (20000 км) , з нахилом 3-х орбітальних площин 64,80 .
Крім того, згідно новим затвердженої ТТХ і погодженої концепції розвитку навігаційних сигналів, у системі ГЛОНАСС, зберігаючи частотне, увівся також кодовий поділ сигналів, що мається в GPS, але було відсутнє в ГЛОНАСС. І тепер, маючи те й інше, отриманий виграш у рази. Також уведені нові частоти. Це потрібно, у тому числі, щоб знизити погрішність при проходженні сигналу через атмосферу.
24-канальний двосистемний (ГЛОНАСС + GPS) навігаційний приймач SPІRІT DuoStar-2000 розроблений у Росії для програми ГЛОНАСС (рис.2.2). Він призначений для визначення координат і швидкості в різних додатках, у тому числі і додатках, що предявляють підвищені вимоги до точності визначення, таких як автомобільна, морська чи авіа навігація.
Рис.2.2.
Приймач SPІRІT DuoStar-2000 здатний одночасно приймати й обробляти сигнали обох навігаційних систем (російської й американський), у тому числі і на обєктах з високою динамікою при істотному перепаді температур у диференціальному режимі.
Використання сигналів двох існуючих супутникових систем ГЛОНАСС і GPS дозволяє приймачу DuoStar-2000 істотно підвищити швидкість визначення координат і домогтися більшої надійності позиціонування, в умовах, де утруднений пошук супутникових сигналів (видимість частини супутників обмежена будівлями (місто) чи рельєфом місцевості (лісові/гірські масиви й ін.)).
В сучасні системи навігації наземних рухомих обєктів часто входить апаратура СРНС. Як вже відзначалося, в склад англійської СН INS-202 входить апаратура СРНС NAVSTAR, що дозволяє визначити координати обєктів з СКП не більше за 15-20 м, незалежно від початкової геодезичної привязки і часу.
Для цілей навігації разом з іншими СН (ІНС, БІНС, тощо) широке застосування знайшли СРНС типу NAVSTAR (GPS), ГЛОНАСС.
Американська фірма Northrop розробила зкомплексовану систему навігації (ЗКСН) для наземних рухомих обєктів, в якій суміщені в одному блоці БІНС і одноканальний приймач СРНС NAVSTAR. У процесі випробувань системи точність визначення координат при роботі за відкритим С/А-кодом не перевищувала 30 м.
Інша фірма Texas Instruments провела випробуванн на літаках і наземних обєктах ЗСН на базі БІНС і двоканального приймача СРНС NAVSTAR. У процесі випробувань точність визначення координат не перевищувала 30 м при роботі за відкритим С/А-кодом.
На сьогодні в країнах членах НАТО і РФ активно продовжуютьс роботи по створенню СН на базі ІНС, БІНС і СРНС типу NAVSTAR, ГЛОНАСС. Ведуться роботи і досягнуті перші вагомі результати в цьому напрямку в Україні. Реалізуються можливості інформаційного обєднання систем NAVSTAR і ГЛОНАСС, з тим, щоб спільно використовувати сигнали вказаних систем. Спільне використання сигналів систем NAVSTAR і ГЛОНАСС дає можливість залучити в сеансах навігаційних визначень більшу кількість ІСЗ, що дозволяє вибирати найбільш вигідні їх риси і реалізувати найвищу точність, а також підвищити надійність і достовірність навігаційних визначень.
СРНС помилок не накопичують. Навігаційні параметри визначаються в межах СКП 20 – 30м (5 м в диференціальному режимі) незалежно від часу.
Висновки
До основних недоліків СРНС слід віднести:
- можливість затінення сигналів ІСЗ будівлями, спорудами, складним рельєфом тощо;
- можливість зриву спостереження за сигналами ІСЗ при великих (більше за 35°) кутах крену і тангажу рухомого обєкта, що обумовлено нахилом приймальної антени СРНС, встановленої на рухомому обєкті (агрегаті);
- можливість спотворення сигналів, що надходять з ІСЗ країною – власником або засобами РЕБ противника, можливість короткотривалого або повного припинення трансляції навігаційної інформації з ІСЗ.
Вказані недоліки можуть спричинити перерви у роботі апаратури СРНС.
На сучасному етапі назріла необхідність значно скоротити час на підготовку даних для роботи навігаційної апаратури, максимально автоматизувати опрацювання та застосування навігаційної інформації при штатному застосуванні машини, вирішити завдання отримання цілевказань від старшого начальника та прийняття рішень щодо залучення будь-якої машини підрозділу, котра знаходиться у найвигіднішому положенні для штатного застосування, передачі цілевказань на підлеглі машини та здійснення контролю за їх діями під час маршу і штатного застосування. Отже назріла необхідність вдосконалення існуючих систем управління взаємодією з метою розширення кола завдань, які ними вирішуються та значно скорочення часу на їх вирішення [4].
При цьому додатково можуть бути вирішені наступні завдання:
· проведення аналізу місцевості за допомогою нових можливостей електронної карти (відображення додаткових шарів інформації);
· відображення розташування своєї та машин підрозділу і тактичних завдань на фоні топографічної обстановки на екрані монітору (використання електронної карти);
· проведення розрахунків видимості або невидимості цілей за передбачених позицій – побудова профілів місцевості за напрямком та за обєктом (використання цифрової моделі рельєфу);
· відображення полів невидимості, танконебезпечних (у військових) напрямків і вибір оптимального маршруту з урахуванням властивостей місцевості та розташування противника і своїх сил;
· створення так званих буферних зон на маршруті руху;
· відображення на електронній карті розвіданих цілей, передачі даних про них на всі машини підрозділу у відповідних умовних знаках;
· миттєве отримання координат будь-якої точки на карт (Х, Y, Н), визначення дирекційного кута на орієнтир;
· проведення підготовки до пересування техніки з а найкоротший час, а саме – вибір вихідного пункту, маршрутних точок, районів і часу переорієнтування, підготовка вихідних даних;
· автоматичне введення вихідних даних у навігаційну апаратуру.
Список використаної літератури
1. Волчко П.І., Іванов В.І., Корольов В.М. та інші Вимоги до характеристик навігаційної інформації і систем навігації наземних рухомих обєктів у сучасному штатному процесі, - Сучасні досягнення геодезичної науки та виробництва, №5, стор. 280-283, Ліга-Прес, Львів, 2000.
2. Global radionavigation – the next 50 years and beyond. Benkers John M. J., Navigation. 2000. 53, №2, стор. 207-214, 1іл, Бібл. 6.
3. La navigation par satellite, le point de vue des utilisateurs europeens. Bara J. M., Navigation (France). 2000. 48, №191, стор. 69-75.
4. Волчко П.І., Корольов В.М., Макаревич В.Д. та інші Місце геоінформаційних технологій на базі навігаційної інформації в системах управління взаємодією у підрозділах сухопутних військ, - ІІІ Міжнародна науково-технічна конференці Гіротехнологія, навігація, керування рухом і конструювання рухомих обєктів, стор. 187-192, Київ, 2001.
5. Карпінський Ю. О., Лященко А. А., Кібець О. Г., Рябчій В. В. Функції та геоінформаційне забезпечення інтелектуальних транспортних систем. //Вісник геодезії і картографії. – 2004. – № 3.– С. 71–79.
6. Harley J. Miller, Shih Lung Shaw. Geographic information systems for transportation: principles and applications. – USA, NY, Oxford University Press, Inc.– 2001. – 460 p.
7. ISO/TR 14825. Geographic Data Files (GDF) –ISO/TC 204/WG3. – 1996. – Р. 11–15.
8. ISO/Draft International Standard: GDF – Geographic Data Files. – Version 4.0 – ISO/TC 204/WG3:CD. – 2001. – Р. 02–14.
9. Карпінський Ю. О., Дроздівський О. П. Основні принципи побудови базової моделі дорожньої мережі в міжнародному стандарті GDF 4.0. // Зб. наук. праць. Сучасні досягнення геодезичної науки та виробництва. – Львів: НУ Львівська політехніка, 2005. – С. 302–306.
10. Карпінський Ю. О., Лященко А. А. Формування національної інфраструктури просторових даних – пріоритетний напрям топографо-геодезичної та картографічної діяльності. // Вісник геодезії і картографії. – 2001. – № 3. – С. 65–73.