Компютерна схемотехніка
СОДЕРЖАНИЕ: Міністерство освіти та науки України Одеський національний політехнічний університет Інститут комп’ютерних систем Кафедра інформаційних системМіністерство освіти та науки України
Одеський національний політехнічний університет
Інститут комп’ютерних систем
Кафедра інформаційних систем
Курсова робота
з дисципліни
«Комп’ютерна схемотехніка»
Виконав
Бородавкін С. М.,
ст. гр. АН-011
Перевірив
доц. Ніколенко А.О.
Одеса – 2003
З А В Д А Н Н Я
на курсову роботу з дисципліни
“Комп’ютерна схемотехніка”
1.1 Синтезувати комбiнацiйну схему, що реалізує задану функцію 5-ти змінних.
1.2 За результатами синтезу побудувати функціональну схему в заданому базисі.
1.3 Спроектувати керуючий автомат Мура за заданою граф-схемою алгоритму. Побудувати принципову схему автомата на елементах малого ступеня інтеграції заданої серії. Визначити максимальну затримку переключення схеми та максимальну допустиму частоту переключення.
1.4 Спроектувати керуючий автомат Мілі за заданою граф-схемою алгоритму. Побудувати принципову схему автомата на основі програмованих логічних матриць (ПЛМ).
Завдання видав: доц. каф. інф. систем __________ А.О. Ніколенко
Завдання одержав: ст. гр. АН-011 ____________ С.М. Бородавкін
Анотація
Метою даної курсової роботи являється закріплення основних теоретичних і практичних положень дисципліни «Комп’ютерна схемотехніка» і одержання навички в проектуванні принципових схем цифрових пристроїв обчислювальної техніки. Знання, одержані під час вивчення цієї дисципліни, використовуються для аналізу та синтезу різноманітних цифрових пристроїв обчислювальної техніки та автоматики. На початку роботи виконується вибір варіанту за схемою розглянутою складачем роботи. По-перше синтезується комбінаційна схема і за результатами синтезу будується функціональна схема в базисі 2І-НІ. Потім проектується автомат Мура за блок-схемою і будується принципова схема автомату на елементах малого ступеня інтеграції серії КР1533. Проектується автомат Мілі за заданою граф-схемою алгоритму і будується схема на основі ПЛМ.
Зміст
1. Синтез комбінаційної схеми
1.1. Отримання вихідної БФ
1.2. Мінімізація БФ
1.3. Вибір базиса. Застосування факторного алгоритму
2. Синтез управляючого автомата Мура
2.1. Вибір вихідних даних для проектування
2.2. Розрахунок даних синтезу
3. Синтез управляючого автомата Мілі
3.1. Вихідні дані
3.2. Дані синтезу
4. Перелік використаної літератури
Додаток 1
Додаток 2
Додаток 3
Додаток 4
1. СИНТЕЗ КОМБІНАЦІЙНОЇ СХЕМИ
1.1. Отримання вихідної БФ
Вихідна БФ 5-ти змінних задається своїми значеннями, які визначаються 7-розрядними двійковими еквівалентами чисел, що вибираються з таблиці 1 [1] за значеннями числа (А), місяця (В) і порядкового номера (С) за списком групи. Значення функції на наборах:
· 0-6 – за значенням А;
· 7-13 – за значенням В;
· 14-20 – за значенням С;
· 21-27 – за значенням (А + В + С);
· 28-31 – невизначені значення.
A = 27 ® 3710 = 1001012 ® X100101
B = 6 ® 5910 = 1001012 ® X111011
C = 6 ® 5910 = 1001012 ® X111011
SABC = 39 ® 6210 = 1111102 ® X111110
Таким чином, таблиця істиності для вихідної функції F(X1, X2, X3, X4, X5) має вигляд:
Таблиця 1.1.1
Вихідна БФ для синтезу КС
| № |
X 1 |
X 2 |
X 3 |
X 4 |
X5 |
F |
| 0 |
0 |
0 |
0 |
0 |
0 |
X |
| 1 |
0 |
0 |
0 |
0 |
1 |
1 |
| 2 |
0 |
0 |
0 |
1 |
0 |
0 |
| 3 |
0 |
0 |
0 |
1 |
1 |
0 |
| 4 |
0 |
0 |
1 |
0 |
0 |
1 |
| 5 |
0 |
0 |
1 |
0 |
1 |
0 |
| 6 |
0 |
0 |
1 |
1 |
0 |
1 |
| 7 |
0 |
0 |
1 |
1 |
1 |
X |
| 8 |
0 |
1 |
0 |
0 |
0 |
1 |
| 9 |
0 |
1 |
0 |
0 |
1 |
1 |
| 10 |
0 |
1 |
0 |
1 |
0 |
1 |
| 11 |
0 |
1 |
0 |
1 |
1 |
0 |
| 12 |
0 |
1 |
1 |
0 |
0 |
1 |
| 13 |
0 |
1 |
1 |
0 |
1 |
1 |
| 14 |
0 |
1 |
1 |
1 |
0 |
X |
| 15 |
0 |
1 |
1 |
1 |
1 |
1 |
| 16 |
1 |
0 |
0 |
0 |
0 |
1 |
| 17 |
1 |
0 |
0 |
0 |
1 |
1 |
| 18 |
1 |
0 |
0 |
1 |
0 |
0 |
| 19 |
1 |
0 |
0 |
1 |
1 |
1 |
| 20 |
1 |
0 |
1 |
0 |
0 |
1 |
| 21 |
1 |
0 |
1 |
0 |
1 |
X |
| 22 |
1 |
0 |
1 |
1 |
0 |
1 |
| 23 |
1 |
0 |
1 |
1 |
1 |
1 |
| 24 |
1 |
1 |
0 |
0 |
0 |
1 |
| 25 |
1 |
1 |
0 |
0 |
1 |
1 |
| 26 |
1 |
1 |
0 |
1 |
0 |
1 |
| 27 |
1 |
1 |
0 |
1 |
1 |
0 |
| 28 |
1 |
1 |
1 |
0 |
0 |
X |
| 29 |
1 |
1 |
1 |
0 |
1 |
X |
| 30 |
1 |
1 |
1 |
1 |
0 |
X |
| 31 |
1 |
1 |
1 |
1 |
1 |
X |
1.2. Мінімізація БФ
Виконаємо мінімізацію отриманої БФ по нулях і по одиницях для вибора мінімальної НФ.
|
|
000 |
001 |
011 |
010 |
110 |
111 |
101 |
|
| 00 |
|
1 |
|
X |
1 |
|||
| 01 |
1 |
1 |
|
|
1 |
1 |
1 |
|
| 11 |
1 |
1 |
1 |
X |
X |
X |
X |
|
| 10 |
1 |
|
1 |
1 |
|
X |
1 |
 100
100 X
X 1
1 1
1 X
XРис. 1.2.1. Карта Карно для МДНФ
МДНФ = ![]() +
+![]() +
+![]() +
+![]() +
+![]() +
+![]() +
+![]() (1.2.1)
(1.2.1)
Ціна за Квайном такої МДНФ Скв = 29.
| 000 |
001 |
011 |
|
110 |
111 |
|
100 |
| 00 |
X |
|
0 |
X |
0 |
||
| 01 |
0 |
X |
|||||
| 11 |
0 |
X |
X |
X |
X |
||
| 10 |
|
|
Рис. 1.2.2. Карта Карно для МКНФ
МКНФ=(X1
+X2
+X3
+![]() )(
)(![]() +X3
+
+X3
+![]() +
+![]() )(X2
+X3
+
)(X2
+X3
+![]() +X5
)(X2
+
+X5
)(X2
+![]() +
+
+X4
+![]() ) (1.2.2)
) (1.2.2)
Ціна за Квайном Скв =27.
1.3. Вибір базиса
Застосування факторного алгоритму. Виходячи з результатів, отриманих на попередньому кроці, для синтеза КС вибирається МКНФ. Синтез схеми буде виконаний у базисі 3АБОНІ. В результаті виконання факторного алгоритму вихідна МКНФ набуває вигляду:
![]() (1.3.1)
(1.3.1)
КС, реалізуюча задану БФ, має вигляд:
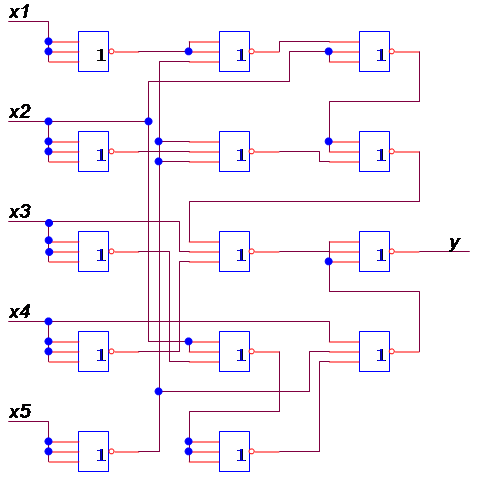
Рис. 1.3.1. Синтезована КС
2. СИНТЕЗ УПРАВЛЯЮЧОГО АВТОМАТА МУРА
2.1. Вибір вихідних даних для проектування
Граф-схема алгоритму складається з трьох блоків E, F, G, і вершин BEGIN і END. Загальна структура граф-схеми показана на рис. 8 [1]. Типи блоків вибираються на основі чисел А, В, С (див. п.1.1).
· Блоку E відповідає схема (A mod 5) = (27 mod 5) = 2;
· блоку F відповідає схема (B mod 5) = (6 mod 5) = 1;
· блоку G відповідає схема (C mod 5) = (6 mod 5) = 1.
Стани автомата будемо кодувати, починаючи з 00000 до 10010 так, що Код стану = Номер стану – 1.
Для синтезу автомата обираються D-тригери, синтез виконується на элементах 555-ї серії ТТЛ.
На підставі отриманих даних будуємо вихідну граф-схему алгоритма. Остання наведена у додатку 1.
2.2. Розрахунок даних синтезу
Табл. 2.2.1
Таблиця переходів автомата Мура
| am |
Kam |
as |
Kas |
X |
D |
| a1 (-) |
00000 |
a2 |
00001 |
1 |
D5 |
| a2 (y2 y4 ) |
00001 |
a4 |
00011 |
1 |
D4 D5 |
| a3 (y3 y6 ) |
00010 |
a4 |
00011 |
X5 |
D4 D5 |
| a6 |
00101 |
|
D3 D5 |
||
| a7 |
00110 |
|
D3 D4 |
||
| a4 (y7 ) |
00011 |
a5 |
00100 |
|
D3 |
| a6 |
00101 |
X1 |
D3 D5 |
||
| a5 (y1 y9 ) |
00100 |
a8 |
00111 |
1 |
D3 D4 D5 |
| a6 (y8 ) |
00101 |
a8 |
00111 |
X2 |
D3 D4 D5 |
| a9 |
01000 |
|
D2 |
||
| a7 (y3 ) |
00110 |
a9 |
01000 |
1 |
D2 |
| a8 (y1 y8 ) |
00111 |
a10 |
01001 |
X4 |
D2 D5 |
| a12 |
01011 |
|
D2 D4 D5 |
||
| a13 |
01100 |
|
D2 D3 |
||
| a9 (y5 y9 ) |
01000 |
a12 |
01011 |
X4
|
D2 D4 D5 |
| a13 |
01100 |
X4 X3 |
D2 D3 |
||
| a13 |
01100 |
|
D2 D3 |
||
| a3 |
00010 |
|
D4 |
||
| a10 (y4 ) |
01001 |
a11 |
01010 |
1 |
D2 D4 |
| a11 (y4 y5 ) |
01010 |
a14 |
01101 |
1 |
D2 D3 D5 |
| a12 (y3 y10 ) |
01011 |
a14 |
01101 |
1 |
D2 D3 D5 |
| a13 (y6 ) |
01100 |
a3 |
00010 |
1 |
D4 |
| a14 (y1 y8 ) |
01101 |
a16 |
01111 |
X4 |
D2 D3 D4 D5 |
| a18 |
10001 |
|
D1 D5 |
||
| a19 |
10010 |
|
D1 D4 |
||
| a15 (y5 y9 ) |
01110 |
a18 |
10001 |
X4
|
D1 D5 |
| a19 |
10010 |
X4 X3 |
D1 D4 |
||
| a19 |
10010 |
|
D1 D4 |
||
| a15 |
01110 |
|
D2 D3 D4 |
||
| a16 (y4 ) |
01111 |
a17 |
10000 |
1 |
D1 |
| a17 (y4 y5 ) |
10000 |
a1 |
00000 |
1 |
- |
| a18 (y3 y10 ) |
10001 |
a1 |
00000 |
1 |
- |
| a19 (y6 ) |
10010 |
a15 |
01110 |
1 |
D2 D3 D4 |
Функції виходів автомата:
![]()
Y1 =a5 + a8 + a14
Y2 =a2
Y3 =a3 + a7 + a12 + a18
Y4 =a2 + a10 + a11 + a16 + a17
Y5 =a9 + a11 + a15 + a17
Y6 =a3 + a13 + a19
Y7 =a4
Y8 =a6 + a8 + a14
Y9 =a5 + a9 + a15
Y10 =a12 + a18
Функції порушення
![]() D1
=a14
D1
=a14
![]() +a15
(X4
+X1
)+a16
+a15
(X4
+X1
)+a16
D2
=a6
![]() +a7
+a8
+a9
(X4
+X1
)+a10
+a11
+a12
+a14
X4
+a15
+a7
+a8
+a9
(X4
+X1
)+a10
+a11
+a12
+a14
X4
+a15
![]()
![]() +a19
+a19
D3
=a3
![]() +a4
+a5
+a6
X2
+a8
+a4
+a5
+a6
X2
+a8
![]()
![]() +a9
X4
+a9
X4
![]() +a9
+a9
![]()
![]() +
+
+a10
+a13
+a14
X4
+a14
![]() X3
+a15
X4
X3
+a15
X3
+a15
X4
X3
+a15
![]() X1
+a15
X1
+a15
![]()
![]() +a19
+a19
D4
=a2
+a3
(X5
+X6
)+a5
+a6
x2
+a8
![]()
![]() +a9
X4
+a9
X4
![]() +a9
+a9
![]()
![]() +a10
+
+a10
+
+ a13
+a14
(X4
+X3
)+a15
(![]() +X3
)+a19
+X3
)+a19
D5=
a1
+a2
+a3
(X5
+X6
)+a4
X1
+a5
+a6
X2
+a8
(X4
+![]() )+a9
X4
)+a9
X4
![]() +a11
+
+a11
+
+a12
+a14
X4
+a14
![]()
![]() +a15
X4
+a15
X4
![]()
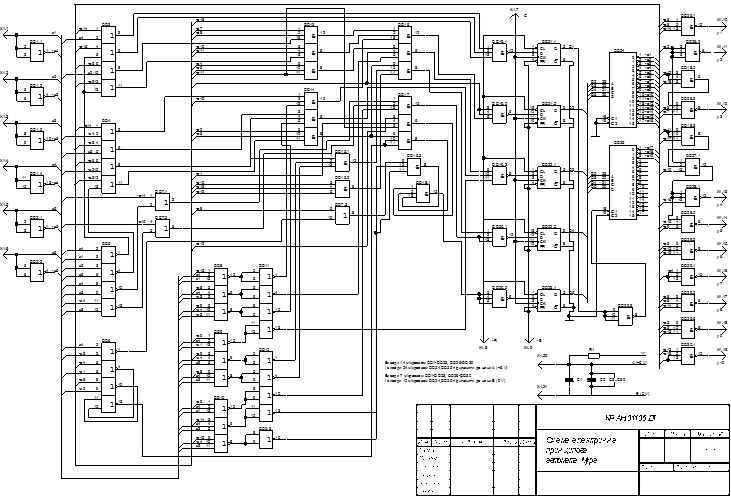
Принципова схема синтезованого автомата Мура представлена у додатку 2.
3. СИНТЕЗ УПРАВЛЯЮЧОГО АВТОМАТА МІЛІ
3.1. Вихідні дані
Вихідна граф-схема алгоритму має той самий вигляд, що й для автомата Мура (див додаток 2). Автомат синтезується на базі Т-тригерів.
Кодування станів здійснюється так само, як і для автомата Мура:
Код стану = Номер стану - 1
Розмітка станів для автомата Мілі виконана синім кольором.
3.2. Дані синтезу
Таблиця 3.1.1
Таблиця переходів-виходів автомата Мілі
| am |
Kam |
as |
Kas |
X |
Y |
T |
| a1 |
0000 |
a2 |
0001 |
1 |
y2 y4 |
T4 |
| a2 |
0001 |
a3 |
0010 |
1 |
y7 |
T3 T4 |
| a3 |
0010 |
a4 |
0011 |
|
y1 y4 |
T4 |
| a10 |
1001 |
X1 |
y8 |
T1 T3 T4 |
||
| a4 |
0011 |
a5 |
0100 |
1 |
y1 y8 |
T2 T3 T4 |
| a5 |
0100 |
a6 |
0101 |
y4 |
T4 |
|
| a7 |
0110 |
|
y3 y10 |
T3 |
||
| a13 |
1100 |
|
y6 |
T1 |
||
| a6 |
0101 |
a7 |
0110 |
1 |
y4 y5 |
T3 T4 |
| a7 |
0110 |
a8 |
0111 |
1 |
y1 y8 |
T4 |
| a8 |
0111 |
a9 |
1000 |
X4 |
y4 |
T1 T2 T3 T4 |
| a1 |
0000 |
|
y3 y10 |
T2 T3 T4 |
||
| a15 |
1110 |
|
y6 |
T1 T4 |
||
| a9 |
1000 |
a1 |
0000 |
1 |
y4 y5 |
T1 |
| a10 |
1001 |
a5 |
0100 |
X2 |
y1 y8 |
T1 T2 T4 |
| a11 |
1010 |
|
y5 y9 |
T3 T4 |
||
| a11 |
1010 |
a7 |
0110 |
X4
|
y3 y10 |
T1 T2 |
| a13 |
1100 |
X4 X3 |
y6 |
T2 T3 |
||
| a13 |
1100 |
|
y6 |
T2 T3 |
||
| a12 |
1011 |
|
y3 y6 |
T4 |
||
| a12 |
1011 |
a3 |
0010 |
X5 |
y7 |
T1 T4 |
| a10 |
1001 |
|
y8 |
T3 |
||
| a14 |
1101 |
|
y3 |
T2 T3 |
||
| a13 |
1100 |
a12 |
1011 |
1 |
y3 y6 |
T2 T3 |
| a14 |
1101 |
a11 |
1010 |
1 |
y5 y9 |
T2 T3 T4 |
| a15 |
1110 |
a16 |
1111 |
1 |
y5 y9 |
T4 |
| a16 |
1111 |
a1 |
0000 |
X4
|
y3 y10 |
T1 T2 T3 T4 |
| a15 |
1110 |
X4 X3 |
y6 |
T4 |
||
| a15 |
1110 |
|
y6 |
T4 |
||
| a16 |
1111 |
|
Y5 y9 |
- |
![]() Y1
= a3
Y1
= a3
![]() + a4
+ a7
+ a10
X2
+ a4
+ a7
+ a10
X2
Y2 = a1
Y3
= a5
![]()
![]() +a8
+a8
![]()
![]() +a11
X4
+a11
X4
![]() +a11
+a11
![]() X1
+a14
X1
+a14
![]() X6
+a13
+a16
X4
X6
+a13
+a16
X4
![]()
Y4 =a1+ a5 X4 + a6 + a8 X4 + a9
Y5
= a6
+ a9
+ a10
![]() +a14
+a15
+a16
+a14
+a15
+a16
![]()
![]()
Y6
=a5
X4
X3
+a15
![]() X3
+a11
X4
X3
+a11
X3
+a11
X4
X3
+a11
![]() X1
+a11
X1
+a11
![]()
![]() +a13
+a16
X4
X+a15
+a13
+a16
X4
X+a15
![]() X1
X1
Y7 =a2 +a12 X5
Y8
=a3
X1
+a4
+a7
+a10
X2
+a12
![]()
![]()
Y9
=a3
![]() +a10
+a10
![]() +a14
+a15
+a16
+a14
+a15
+a16
![]()
![]()
Y10
=a5
![]()
![]() +a8
+a8
![]()
![]() +a11
X4
+a11
X4
![]() +a16
X4
+a16
X4
![]()
Функції порушення:
![]() T1
=a3
X1
+a5
T1
=a3
X1
+a5
![]() X3
+a8
X4
+a8
X3
+a8
X4
+a8
![]() X3+
a9
+a10
X4
X3+
a9
+a10
X4
![]() +a12
X5
+a16
X4
+a12
X5
+a16
X4
![]()
T2
=a4
+a8
X4
+a8
![]()
![]() +a10
X2
+a11
X4
+a10
X2
+a11
X4
![]() +a11
X4
X3
+a11
+a11
X4
X3
+a11
![]() X1
+a12
X1
+a12
![]() X6
+
X6
+
+a13
+a14
+a16
X4
![]()
T3
=a2
+a3
X1
+a4
+a5
![]()
![]() +a6
+a8
X4
+a8
+a6
+a8
X4
+a8
![]()
![]() +a10
+a10
![]() +a11
X4
X3
+a11
+a11
X4
X3
+a11
![]() X1
+
X1
+
+a12
![]()
![]() +a12
+a12
![]() X6
+a13
+a14
+a16
X4
X6
+a13
+a14
+a16
X4
![]()
T4
=a1
+a2
+a3
![]() +a3
X1
+a4
+a5
X4
+a6
+a7
+a8
+a10
+a11
+a3
X1
+a4
+a5
X4
+a6
+a7
+a8
+a10
+a11
![]()
![]() +a12
X5
+a14
+a15
+
+a12
X5
+a14
+a15
+
+a16
X4![]() +a16
X4
X3
++a16
+a16
X4
X3
++a16
![]() X1
X1
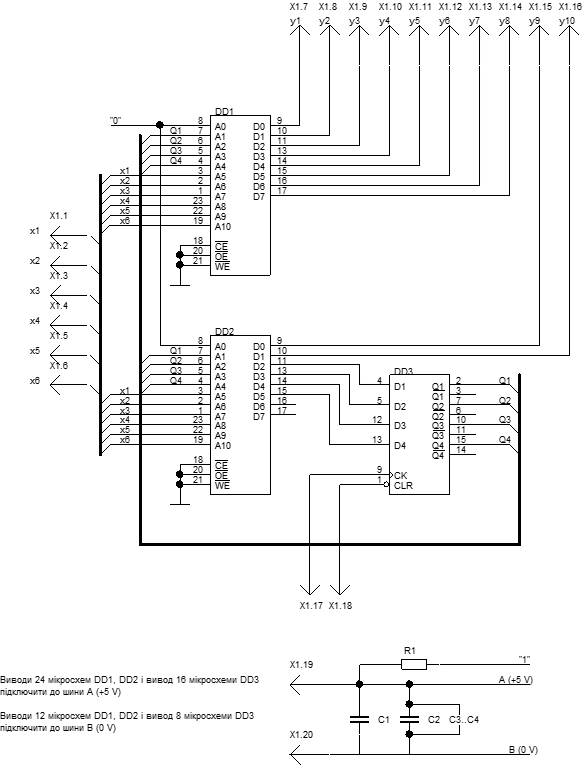
Принципову схему автомата Мілі необхідно побудувати на основі ПЗП. Для цього будемо використовувати ПЗП К555РЕ4 розрядністю 2Кх8, тобто 2048 8-бітових слів. Очевидно, таких ПЗП необхідно взяти у кількості 2, оскільки необхідно реалізувати всього 14 функцій (10 функцій виходу і 4 функції для переходу в новий стан). Таким чином, адресний простір буде використаний наполовину.
Таблиця з прошивкою ПЗП наведена у додатку 3. Принципова схема автомата Мілі наведена у додатку 4.
4. ЛІТЕРАТУРА
1. Методичні вказівки до курсового проектування з дисципліни „Комп’ютерна схемотехніка” для студентів спеціальностей 7.080401, 7.080403 / Укл.: С.Г.Антощук, А.О.Ніколенко, М.В.Ядрова, О.В.Глазєва. – Одеса: ОНПУ, 2003.
2. Баранов С.І. “Синтез мікропрограмних автоматів”.-Л.:Енергія,1979.
3. Угрюмов Є.П. “Цифрова схемотехніка”.-С.ПБ.:БХВ-Петербург,2001.
4. Справочник по інтегральним мікросхемам / Під ред. Б.В. Тарабрина.-М.: Радіо і зв’язок, 1987.
ДОДАТОК 1
Граф-схема алгоритма для синтезу автоматів Мура і Мілі
 |
|
|
|
|
|