Логарифмические частотные характеристики и передаточные функции радиотехнической следящей системы
СОДЕРЖАНИЕ: Логарифмические частотные характеристики. Передаточные функции следящих систем. Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы. Типовые динамические звенья. Логарифмическая амплитудно-частотная характеристика.БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИНФОРМАТИКИ И РАДИОЭЛЕКТРОНИКИ
Кафедра РТС
РЕФЕРАТ
На тему:
«Логарифмические частотные характеристики и передаточные функции радиотехнической следящей системы»
МИНСК, 2008
Использование логарифмических частотных характеристик
Метод логарифмических частотных характеристик (ЛЧХ) используется как для анализа, так и для синтеза следящих систем. Метод построения ЛЧХ состоит в графическом изображении АЧХ и ФЧХ в логарифмическом масштабе. Особенно удобен метод, использующий асимптотические логарифмические амплитудно-частотные характеристики (ЛАЧХ). Для некоторых систем, называемых мимнимально-фазовыми, достаточно построить лишь ЛАЧХ, так как она определяет все свойства системы. К минимально-фазовым относят системы, у которых корни характеристических уравнений, составленных из числителя и знаменателя передаточной функции имеют отрицательные вещественные части.
Метод построения асимптотических ЛАХ состоит в следующем. Выражение для ЛАЧХ и ЛФЧХ записываются в виде
Частота откладывается по оси абсцисс в логарифмическом масштабе, а усиление – в децибелах (дБ) по оси ординат. Логарифмическая фазочастотная характеристика (ЛФЧХ) строится под ЛАЧХ с общей осью частот.
Метод построения асимптотических ЛАХ рассмотрим на примере.
Пусть передаточная функция разомкнутой системы определяется выражением
 .
.
Заменой переменной перейдем к частотной передаточной функции
 ,
,
где Т1 , Т2 , Т3 – постоянные времени соответствующих звеньев; К – коэффи циент усиления или добротность (имеет размерность частоты).
Модуль частотной передаточной функции А() последовательно включенных звеньев определяется как произведение модулей этих звеньев. а аргумент – как сумма фазовых сдвигов звеньев.
 ;
;
Обычно полагают, что ![]() . Пусть Т1
Т2
, Т3
.
. Пусть Т1
Т2
, Т3
.
Обозначим  – сопрягающая частота;
– сопрягающая частота; ![]() . Тогда
. Тогда
 ;
;
При построении асимптотических ЛАХ используется следующее правило:
Если ![]() , то пренебрегают вторым слагаемым, т.е.
, то пренебрегают вторым слагаемым, т.е.  .
.
Если ![]() , то пренебрегают единицей,
, то пренебрегают единицей, 
При этом в точке сопряжения ошибка не превышает нескольких дБ.
Асимптотическая ЛАХ для n последовательно включенных звеньев состоит из n+1 асимптоты, каждая из которых строится в диапазоне частот:
1ая: ![]() ;
;
2ая: ![]() ;
;
… … … … …
n+1: ![]() .
.
Построим L() (рис. 1).
Уравнение для первой асимптоты (![]() ):
):
![]() ,
,
при = K, L() = 0.
Наклон асимптоты будет равен –20 дБ на декаду.
![]()
Вторая асимптота строится в диапазоне частот (![]() )
)
в соответствии с уравнением:

Рис. 1. Логарифмическая амплитудно-частотная характеристика
 .
.
Наклон асимптоты будет равен –40 дБ на декаду.
Третья асимптота строится в диапазоне частот (![]() ). Уравнение третьей асимптоты:
). Уравнение третьей асимптоты:

Это уравнение прямой, проходящей через точки L (2 ) и L (3 ),
где  .
.
Таким образом, можно записать:
В точке L2 асимптота изменяет свой наклон на +20 дБ, итоговый наклон третьей асимптоты составляет –20 дБ.
Четвертая асимптота строится в диапазоне частот (![]() ) в соответствии с уравнением:
) в соответствии с уравнением:

Таким образом, при переходе через сопрягающую частоту 3 асимптота меняет свой наклон на –20 дБ, и в итоге имеет наклон –40 дБ/дек.
Выводы:
1.При переходе текущего значения частоты через очередную сопрягающую частоту наклон асимптоты изменяется на +20 дБ, если множитель  находится в числителе выражения для расчета АЧХ и изменяется на –20 дБ, если этот множитель находиться в знаменателе.
находится в числителе выражения для расчета АЧХ и изменяется на –20 дБ, если этот множитель находиться в знаменателе.
2. Наклон каждой асимптоты кратен 20 дБ /дек.
По ЛАЧХ можно восстановить частотную передаточную функцию.
Передаточные функции следящих систем
Из изложенного выше следует, что любая из передаточных функций: операторный коэффициент передачи W(p), передаточная функция W(s) и частотная передаточная функция (комплексный коэффициент передачи) W(jw) может быть получена путем замены переменных в известном выражении для одной из вышеназванных передаточных функций.
Определим передаточные функции, связывающие входные и выходные переменные в замкнутой следящей системе, представленной математической моделью (рис. 2).
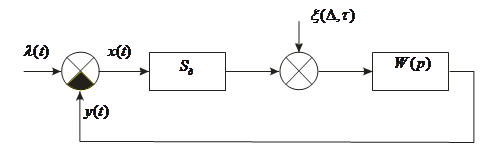
Рис. 2. Структурная схема следящей системы
Исходные соотношения:
![]() – ошибка слежения. (1)
– ошибка слежения. (1)
В свою очередь
![]() (2)
(2)
Подставим (1) в (2) и сгруппируем слагаемые. В результате получим

![]() ,
,
где 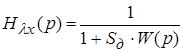 и
и 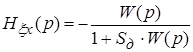 соответственно передаточные функции от воздействия к ошибке и от возмущения к ошибке.
соответственно передаточные функции от воздействия к ошибке и от возмущения к ошибке.
Найдены, таким образом, передаточные функции, связывающие ошибку слежения с входным воздействием и с флюктуационной составляющей.
Теперь подставим (1) в (2) и сгруппируем слагаемые

![]()
где 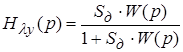 и
и  .
.
![]() и
и ![]() – передаточные функции от воздействия к управляемой величине (связывающие входную и выходную величины) и от возмущения к управляемой величине.
– передаточные функции от воздействия к управляемой величине (связывающие входную и выходную величины) и от возмущения к управляемой величине.
Можно значительно упростить процесс определения передаточной функции, если использовать следующую формулу:
 ,
,
где u – входное воздействие, а v – выходная величина;
![]() – передаточная функция прямой цепи, связывающей входное воздействие и выходную величину.
– передаточная функция прямой цепи, связывающей входное воздействие и выходную величину.
![]() – передаточная функция разомкнутой системы (размыкается в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) .
– передаточная функция разомкнутой системы (размыкается в точке подачи обратной связи и определяется как передаточная функция от ошибки x(t) к управляемой величине y(t) .
Передаточные функции в обобщенной структурной схеме радиотехнической следящей системы
Основная передаточная функция – передаточная функция замкнутой системы. Определяется отношением изображений по Лапласу управляемой величины и задающего воздействия:
где ![]()
![]()
Передаточная функция разомкнутой системы – отношение изображений по Лапласу управляемой величины и ошибки слежения.
![]()
Передаточная функция от воздействия к ошибке – отношение изображений ошибки и задающего воздействия:
![]() – передаточная функция от возмущения к управляемой величине:
– передаточная функция от возмущения к управляемой величине:

Типовые динамические звенья следящих систем
Для упрощения анализа следящих систем сложные динамические звенья, описываемые дифференциальным уравнениями высоких порядков, разбивают на ряд простых таким образом, чтобы дифференциальные уравнения, описывающие их работу, были не выше второго порядка:
![]() .
.
Этому уравнению соответствует передаточная функция
Всё множество динамических звеньев, независимо от назначения, конструктивных особенностей, элементной базы классифицируется по виду дифференциального уравнения, описывающего работу звена или его передаточной функции. По этому признаку классификации различают следующие типы динамических звеньев:
- позиционные;
- интегрирующие;
- дифференцирующие.
К позиционным звеньям относятся: безынерционное, апериодическое звено 1-ого порядка, апериодическое звено 2-ого порядка, колебательное звено.
К дифференцирующим звеньям относятся: идеальное дифференцирующее, инерционное дифференцирующее, форсирующее.
К интегрирующим звеньям относятся: идеальное интегрирующее, инерционное интегрирующее, изодромное.
Апериодическое звено 1ого порядка описывается ДУ следующего вида:
![]() или
или ![]()
где ![]() – выходная величина;
– выходная величина; ![]() (t) – входная величина; Т постоянная времени звена; k коэффициент передачи.
(t) – входная величина; Т постоянная времени звена; k коэффициент передачи.
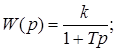
Передаточная функция
 ;
;
![]() ,
,
где ![]() ;
; ![]() .
.
К этим звеньям относятся исполнительные двигатели, усилители мощности, магнитные усилители , RC – фильтры.
АЧХ звена определяется выражением:
где ![]() – сопрягающая частота.
– сопрягающая частота.
ФЧХ звена: ![]()
Переходная характеристика:
Весовая функция
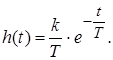
Графическое изображение переходной и весовой функции (рис. 3):
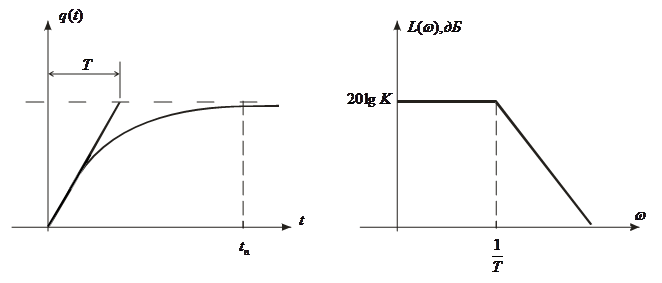
Рис. 3. Переходная и весовая характеристики апериодического звена
Логарифмическая амплитудно-частотная характеристика

Длительность переходного процесса tп = 3T; q(tп ) = 0,95q.
Полоса пропускания ![]()
При уменьшении постоянной времени Т увеличивается п , и при Т = 0 переходная характеристика будет повторять входной процесс, и в результате получим звено, описываемое уравнением
![]() ;
;
такое звено называется безынерционным ![]() ;
;
Передаточная функция, АЧХ и ФЧХ звена соответственно равны:
W(s) = k; A() = k;() = 0.
К безынерционным звеньям обычно относят звенья, ширина спектра сигналов, на входах которых значительно уже полосы пропускания.
Рассмотрим пример RC – цепи (рис.4)
Такая цепь относится к апериодическому звену и имеет передаточную функцию
где T =R1R2C/R1+R2.
![]()

Рис.4. Пример апериодического звена
При ![]() и апериодическое звено трансформируется в безынерционное звено.
и апериодическое звено трансформируется в безынерционное звено.
ЛИТЕРАТУРА
1. Коновалов. Г.Ф. Радиоавтоматика: Учебник для вузов. – М.: Высш.шк., 2000.
2. Радиоавтоматика: Учеб. пособие для вузов./ Под ред. В.А. Бесекерского.- М.: Высш. шк., 2005.
3.. Первачев. С.В Радиоавтоматика: Учебник для вузов.- М.: Радио и связь, 2002.
4. Цифровые системы фазовой синхронизации/ Под ред. М.И. Жодзишского – М.: Радио, 2000