Математична модель вимірювальної системи в середовищі Delphi
СОДЕРЖАНИЕ: Курсова робота Математична модель вимірювальної системи в середовищі Delphi АНОТАЦІЯ Опис програми містить загальний опис алгоритмів головної програми та допоміжних на рівні блок-схем, а також більш детальний опис розробленої програми на рівні програмного коду.Курсова робота
Математична модель вимірювальної системи в середовищі Delphi
АНОТАЦІЯ
Опис програми містить загальний опис алгоритмів головної програми та допоміжних на рівні блок-схем, а також більш детальний опис розробленої програми на рівні програмного коду.
ЗМІСТ
ВСТУП
1. ОПИС ПРОЦЕДУРИ ІНІЦІАЛІЗАЦІЇ ВИМІРЮВАЛЬНОЇ СИСТЕМИ
2. ОПИС ПРОЦЕДУР ПЕРЕТВОРЕННЯ СТАТИЧНОГО СИГНАЛУ
3. ОПИС ПРОЦЕДУРИ ПЕРЕТВОРЕННЯ ЗМІННОГО СИГНАЛУ
Висновки
Список використаної літератури
ВСТУП
Метою розробленої програми є ознайомлення з принципами роботи комп’ютерної вимірювальної системи. Оскільки аналізувати стан сигналу в реальній вимірювальній системі є досить складною задачею, тому доцільно використати програмне моделювання.
Програма створена в середовищі Delphi [1, 2] і дозволяє моделювати процеси перетворення температури в аналогову напругу за допомогою термопари, підсилення напруги і перетворення її в цифровий код за допомогою АЦП, зчитування цифрового сигналу в порт принтера. Окрема процедура формує змінний вхідний сигнал, розраховує і відображає відповідний вихідний сигнал у вигляді графіку.
1. Опис процедури ініціалізації вимірювальної системи
Ініціалізація вимірювальної системи виконується при створенні програми за допомогою процедури „FormCreate”. Алгоритм процедури наступний (рис. 1.1):
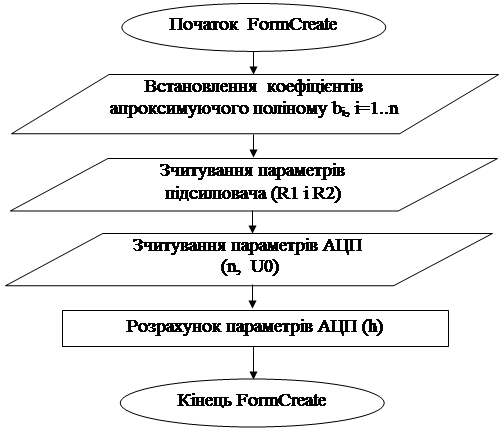
Рис.1.1. Блок-схема процедури „FormCreate”
Спочатку встановлюються значення коефіцієнтів bi , i=1..n, які описуються апроксимуючий поліном залежності термоелектрорушійної сили від температури t.
 , (1.1)
, (1.1)
де E – термоелектрорушійна сила (терс), мкВ;
Згідно завданню значення коефіцієнтів наступні (табл. 1.1):
Таблиця 1.1
Коефіцієнти апроксимуючого поліному
| i | 1 | 2 | 3 | 4 | 5 |
| bi | 3,87408·101 | 3,31902·10-2 | 2,07142·10-4 | -2,19458·10-6 | 1,10319·10-8 |
| i | 6 | 7 | 8 | ||
| bi | -3,09275·10-11 | 4,56533·10- 14 | -2,76169·10- 17 |
Параметри підсилювача встановлюються значеннями опорів R1 і R2, які визначають коефіцієнт підсилення.
Параметри АЦП визначаються розрядністю n та значеннями опорної напруги U0, на основі яких визначається роздільна здатність АЦП h.
2. Опис процедур перетворення статичного сигналу
Статичне перетворення сигналу складається з наступних етапів (рис. 2.1). Після перевірки допустимості температурного діапазону моделюється перетворення термопарою температури T в напругу U1процедурою „B_T_U1” за допомогою апроксимуючого поліному bi , i=1..n. Далі підсилювач збільшує напругу U1 до величини U2 (процедура „U1_to_U2”). Підсилена напруга U2 за допомогою АЦП перетворюється в цифровий код D (процедура „B_U2_to_D” ) (рис. 2.2, рис. 2.3).
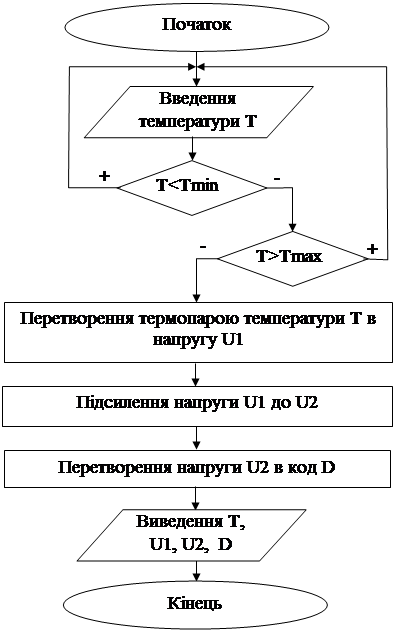
Рис. 2.1. Блок-схема процедур статичного перетворення сигналу
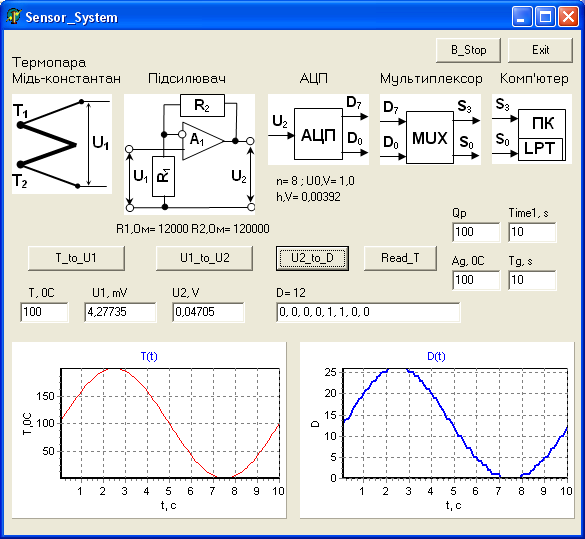
Рис.2.2. Екранна форма програми на етапі виконання
3. Опис процедури перетворення змінного сигналу
Перетворення змінного сигналу виконується процедурою „Read_T” (рис. 3.1). Після введення кількості точок Qp, в яких буде відбуватися зчитування сигналу, і загального часу зчитування Time1, відбувається зчитування сигналу в циклі за номером точки p.
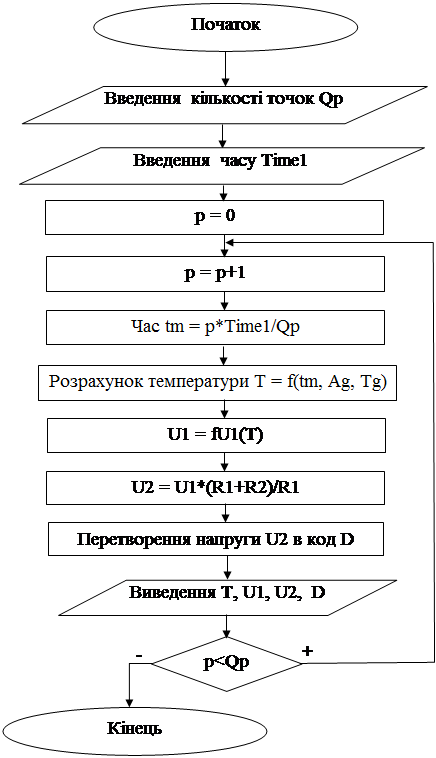
Рис. 3.1. Блок-схема процедури Read_T
Для кожного зчитування розраховується час tm, температура T, напруги U1 і U2. Отримана напруга U2 перетворюється в цифровий код D.
Висновки
В описі програми розглянуто алгоритм процедур ініціалізації вимірювальної системи, зчитування статичного і змінного сигналів на рівні блок-схеми та на рівні програмного коду. Програма має простий інтерфейс завдяки використанню зображень, які пояснюють функції різних етапів обробки сигналу.
Список використаної літератури
1. Гофман В.Э., Хомоненко А.Д. Delphi 6. – СПб.: БХВ-Петербург, 2001. – 1135 с.
2. Агуров П.В. Последовательные интерфейсы ПК. Практика программирования. – СПб.: БХВ-Петербург, 2004.– 496с.