Методические указания и контрольное задание для студентов заочного отделения образовательных учреждений
СОДЕРЖАНИЕ: Составлено в соответствии с примерной программой учебной дисциплины «Фотограмметрия и дешифрирование снимков» для специальности 020501 «Картография» среднего профессионального образования базового уровня обученияКолледж геодезии и картографии МИИГАиК
|
ФОТОГРАММЕТРИЯ И ДЕШИФРИРОВАНИЕ СНИМКОВ
Методические указания и контрольное задание
для студентов заочного отделения
образовательных учреждений
среднего профессионального образования по специальности
020501 «Картография»
120101 «Прикладная геодезия»
Москва
2010
|
|
|
Автор: Новосёлов Д.И., кандидат технических наук, преподаватель Московского колледжа геодезии и картографии
Рецензент: Левичев О.А., кандидат военных наук, преподаватель Московского колледжа геодезии и картографии
«Фотограмметрия и дешифрирование снимков». Методические указания и контрольное задание. – М: Издательство «ГОУ СПО Московский колледж геодезии и картографии», 2010 г., 96 c.
1. ВВЕДЕНИЕ
Методические указания по дисциплине «Фотограмметрия и дешифрирование снимков» предназначены для студентов специальности 020501 «Картография».
Изучение дисциплины позволит использовать современные методы фотограмметрии для решения различных задач топографо-геодезического производства.
Дисциплина «Фотограмметрия и дешифрирование снимков» изучается студентами заочного отделения по специальности «Картография» на 2 курсе. В ходе изучения дисциплины необходимо выполнить одну контрольную работу, завершается изучение дисциплины сдачей экзамена.
Перед выполнением контрольной работы студентам рекомендуется изучить вопросы содержания примерной программы учебной дисциплины с перечнем рекомендованной литературы, методические указания по изучению каждой темы программы. Для проверки качества усвоения материала рекомендуется дать ответы на вопросы для самоконтроля.
Методические указания по изучению каждой темы программы включают десять вариантов контрольной работы. Каждому студенту необходимо выполнить задание только своего варианта.
Контрольная работа может выполняться в тетради и сдаваться в рукописном виде, либо с использование ПЭВМ и средств печати. Ответы на все вопросы необходимо давать как можно более подробно, при необходимости иллюстрировать чертежами, рисунками, схемами. Все рисунки, схемы и т.п. должны быть пронумерованы с использованием арабских цифр. В пределах работы устанавливается сквозная их нумерация. В конце работы приводится список литературы, оформленный в соответствии с требованиями ГОСТ (например, Першиков В.И., Савинков В.М. Толковый словарь по информатике, 2-е изд., доп. – М.: Финансы и статистика, 1995. – 544 с.). Ссылка на ту или иную литературу из списка литературы осуществляется записью в тексте ее списочного номера (номеров) в диагональных скобках (например: /4/ или /1,3,6/ или /1-3/).
В случае подготовки контрольной работы к сдаче в печатном виде необходимо оформлять материалы с использованием текстового редактора Microsoft Word. Текстовая часть, формулы, рисунки должны быть исполнены одним контрастом в черно-белом цвете. Форматные требования к материалам, оформленным с использованием ПЭВМ и подлежащим сдаче. Размеры полей печатной страницы: слева - 3,0 см; сверху - 3,0 см; справа - 1,5 см; снизу - 2,5 см. Основной текст набирается через 1,5 интервала с использованием шрифта Times New Roman размером 14 кеглей. Все страницы рукописи должны иметь порядковую нумерацию арабскими цифрами вверху посередине листа.
Контрольная работа, не отвечающая вышеназванным требованиям может быть возвращена без положительной оценки. Все исправления в контрольной работе необходимо выполнить до момента проведения экзамена.
В период экзаменационной сессии проводятся консультации в форме лекций и лабораторных занятий. Выполнение всех лабораторных работ является обязательным условием допуска к экзамену.
Студенты заочного отделения, выполнившие лабораторные работы и получившие положительную оценку за контрольную работу допускаются до экзамена по дисциплине.
2. ПРИМЕРНАЯ ПРОГРАММА УЧЕБНОЙ ДИСЦИПЛИНЫ
Введение
Предмет фотограмметрии, ее содержание и задачи. Фототопография и фототопографические съемки. Прикладная фотограмметрия. История развития фотограмметрии.
Раздел 1. Топографическая аэрофотосъемка
В результате изучения раздела студент должен:
иметь представление:
-о технических средствах, применяемых для топографической аэрофотосъемки;
-об устройстве и работе аэрофотосъемочной аппаратуры;
-о производстве летно-съемочных работ;
-о полевых фотолабораторных работах.
знать:
-процесс получения аэрофотоснимков;
-устройство аэрофотоаппарата и аэрофотоустановки;
-виды и масштабы аэрофотосъемки;
-параметры аэрофотосъемки;
основные требования к аэрофотосъемочному материалу.
уметь:
-выполнять оценку качества аэрофотосъемочного материала;
-осуществлять накидной монтаж;
-вычислять параметры аэрофотосъемки.
Тема 1.1 Аэрофотосъемочные самолеты
Принципы полета носителей в атмосфере. Носители аэрофотосъемочного оборудования. Основные летно-технические характеристики аэрофотосъемочных самолетов. Беспилотные летательные аппараты. Космические носители аппаратуры дистанционного изучения земной поверхности. Искусственные спутники Земли. Пилотируемые космические корабли. Орбитальные станции.
Тема 1.2 Аэрофотоаппарат и аэрофотоустановка
Предназначение АФА. Классификация АФА по целевому назначению, принципу действия, размерам аэроснимка, величине фокусного расстояния и типу используемых фотоматериалов. Устройство АФА. Вспомогательное аэрофотосъёмочное оборудование . Аэрофотоустановка. Командный прибор. Светофильтры, оборудуемые АФА. Пленки, используемые в АФА. Статоскоп. Радиовысотомер. Радиодальномерная станция. Спутниковые методы определения координат. Цифровые АФА. Нефотографическая аппаратура . Бортовая радиолокационная аппаратура. Аппаратура телевизионной съемки. Оптико-электронная аппаратура. Аппаратура тепловой съемки.
Тема 1.3 Объектив АФА и его основные характеристики
Построение изображения объективом АФА – геометрическая сущность. Характеристика фотографических объективов . Классификация фотографических объективов в зависимости устранения в них различных искажений. Характеристика фотографических материалов . Принцип получения цифровых снимков . Оборудование для фотографирования с Земли . Основные характеристики фотограмметрических цифровых камер .
Тема 1.4 Аэрофотосъемочные работы
Получение снимков местности. Классификация АФС по количеству и расположению аэрофотоснимков, положению оптической оси аэрофотоаппарата, масштабу фотографирования. Требования к АФС. Особенности при проектировании АФС. Параметры материалов аэрокосмической съемки .
Раздел 2. Теория перспективы и анализ аэрофотоснимка
В результате изучения раздела студент должен:
иметь представление:
-о процессе построения изображений методом центрального проектирования.
знать:
-системы координат, применяемые в фотограмметрии;
-элементы ориентирования аэрофотоснимка;
-масштаб аэрофотоснимка;
-взаимосвязь координат аэрофотоснимка и местности;
-искажения на аэрофотоснимке.
уметь:
-выполнять построение перспектив геометрических фигур;
-определять масштаб аэрофотоснимка;
-вычислять координаты точек местности.
Тема 2.1 Центральная и ортогональная проекции
Понятие о центральной и ортогональной проекциях. Отличие между ортогональной и центральной проекциями. Элементы центральной проекции. Свойства центральной проекции.
Тема 2.2 Элементы ориентирования аэрофотоснимка
Системы координат точек местности и снимка . геоцентрическая система координат. Геодезическая пространственная прямоугольная система координат. Фотограмметрическая пространственная прямоугольная система координат. Плоская прямоугольная система координат. Элементы ориентирования снимка .
Тема 2.3 Масштаб аэрофотоснимка
Понятие масштаба снимка. Масштаб горизонтального снимка. Масштаб наклонного снимка по направлению главной вертикали. Масштаб наклонного снимка в точке нулевых искажений. Масштаб наклонного снимка в точке надира. Масштаб наклонного снимка в главной точке схода. Масштаб наклонного снимка по направлению горизонтали.
Тема 2.4 Искажения на аэрофотоснимке
Смещение точек и искажение направлений, вызванное наклоном снимка. Смещение точек и направлений на снимке, вызванное рельефом местности .
Раздел 3. Создание фотопланов и фотосхем
В результате изучения раздела студент должен:
иметь представление:
-о технических средствах, используемых при трансформировании;
-о методике трансформирования аэрофотоснимков;
-о технологии создания фотоплана и фотосхемы.
знать:
-сущность трансформирования;
-способы и точность трансформирования;
-назначение и применение фотоплана и фотосхемы.
уметь:
-выполнять графическое и аналитическое трансформирование;
-выполнять монтаж и корректуру фотосхемы.
Тема 3.1 Цель, принцип и способы трансформирования
Цель трансформирования, принцип и способы. Геометрические и оптические условия трансформирования.
Тема 3.2 Технические средства для трансформирования
Приборы для трансформирования. Основные технические характеристики фототрансформаторов.
Тема 3.3 Трансформирование аэрофотоснимков
Сущность фотомеханического трансформирования. Ортофототрансформирование. Назначение и области применения цифрового трансформирования снимков . Цифровое трансформирования.
Тема 3.4 Создание фотоплана и фотосхемы
Общие сведения о фотопланах и фотосхемах. Классификация фотопланов. Технологическая схема создания фотопланов. Краткая характеристика процессов. Допуски. Фотосхема. Назначение и применение. Технологическая схема изготовления. Создание цифровых фотопланов.
Раздел 4. Дешифрирование снимков
В результате изучения раздела студент должен:
иметь представление:
-о роли и значении дешифрирования при создании и обновлении топографических карт и планов.
знать:
-сущность дешифрирования снимков;
-виды, методы и способы дешифрирования;
-дешифровочные признаки изображений объектов местности;
-параметры аэрофотосъемки, влияющие на результаты дешифрирования;
-об эталонах дешифрирования;
-этапы выполнения работа по дешифрированию.
уметь:
-пользоваться эталонами дешифрирования;
-составлять описание дешифровочных признаков изображений объектов местности;
-выполнять топографическое дешифрирование аэрофотоснимков;
-выполнять дешифрирование космических снимков.
Тема 4.1 Общие сведения о дешифрировании
Понятие дешифрирования. Виды и методы дешифрирования их краткая характеристика. Дешифровочные признаки. Дешифрирование по эталонам. Приборы для дешифрирования фотоизображений.
Тема 4.2 Топографическое дешифрирование снимков
Цель топографического дешифрирования снимков. Полевое и камеральное дешифрирование – достоинства и недостатки. Организация камерального дешифрирования снимков. Порядок работ при камеральном дешифрировании снимков. Материалы, используемые при дешифрировании снимков. Результаты дешифрирования снимков.
Тема 4.3 Понятие о дешифрировании космических снимков
Свойства космических снимков. Области применения космических снимков. Использование дополнительных материалов при дешифрировании космических снимков. Роль дешифровочных признаков при дешифрировании космических снимков. Технические средства, применяемые для дешифрирования космических снимков.
Раздел 5. Основы стереозрения
В результате изучения раздела студент должен:
иметь представление:
-о стереоэффекте и условиях его получения;
-о стереопаре аэрофотоснимков и ее применении;
-об основных элементах стереопары.
знать:
-виды стереоэффекта и способы его получения;
-о стереомодели местности и ее измерении;
уметь:
-получать стереоэффект;
-выполнять рисовку рельефа под стереоскопом и ЛЗС;
-выполнять измерения на стереокомпараторе.
Тема 5.1 Стереопара аэрофотоснимков и стереомодель
Стереоскопическая пара снимков и области ее применения. Понятие стереомодели и ее масштаб. Способы и методы определения координат точки по аэрофотоснимкам. Основные элементы стереопары снимков.
Тема 5.2 Координаты и параллаксы точек стереопары
Координаты точек стереопары. Параллаксы точек стереопары. Свойства параллаксов на идеальной стереопаре фотоснимков. Геометрический смысл продольного параллакса.
Тема 5.3 Элементы взаимного ориентирования стереопары
Общее понятие об элементах взаимного ориентирования стереопары. Первая система элементов. Вторая система элементов. Понятие о двойной обратной пространственной фотограмметрической засечк е.
Тема 5.4 Фотограмметрическая модель местности
Глаз человека - сложное и совершенное оптическое устройство. Понятие о монокулярном и бинокулярном зрении. Острота стереоскопического зрения. Стереоскопический эффект, простейшие стереоприборы. Способы получения стереоэффекта. Особенности измерения цифровых снимков. Механизм корреляции изображений .
Раздел 6. Создание и обновление топографических карт по аэрофотоснимкам
В результате изучения раздела студент должен:
иметь представление:
-о технологии стереотопографической съемки;
-о назначении и классификации универсальных приборов;
-о создании и обновлении топографических карт и планов.
знать:
-технологическую схему стереотопографического метода съемки;
-классификацию приборов, предназначенных для составления карт и планов по фотоснимкам;
- технологическую схему фотограмметрической обработки стереопары.
уметь:
-выполнять измерения на универсальных фотограмметрических приборах;
-выполнять обработку аэрокосмических снимков на цифровых фотограмметрических станциях.
Тема 6.1 Стереотопографическая съемка. Технологическая схема
Сущность метода стереотопографической съемки. Дифференцированный, универсальный и цифровые методы обработки пары снимков. Технологические процессы стереотопографического метода при аналоговой и цифровой обработке снимков.
Тема 6.2 Назначение и классификация универсальных приборов
Предназначение универсальных приборов. Классификация приборов по способу построения пространственной засечки. Классификация приборов по точности.
Тема 6.3 Аналоговые, аналитические и цифровые приборы
Оптические универсальные аналоговые стереоприборы. Универсальные приборы механического типа . Понятие об универсальных стереоприборах аналитического типа . Особенности основных отечественных фотограмметрических станций .
Тема 6.4 Создание топографических карт на стереоприборах. Основные процессы.
Технологическая схема фотограмметрической обработки стереопары. Съёмка контуров по модели объекта. Съёмка рельефа по модели объекта. Сводка с соседними трапециями.
Тема 6.5 Обновление топографических карт по аэрофотоснимкам
Причины старения топографических карт и планов. Периодичность обновления карт и планов. Способы обновления. Технологическая схема обновления карт по фотоснимкам. Особенности обновления карт по космическим снимкам.
Раздел 7. Фототриангуляция
В результате изучения раздела студент должен:
иметь представление:
-о классификации пространственной фототриангуляции;
-о методах построения фототриангуляции.
знать:
- сущность способа частично зависимых моделей;
- сущность способа независимых моделей;
- способ связок.
уметь:
-пользоваться стереоприборами и системами;
-выполнять обработку аэрокосмических снимков на стереоприборах и системах.
Тема 7.1 Назначение и классификация пространственной фототриангуляции
Назначение и цель фототриангуляции. Сущность фототриангуляции. Виды фототриангуляции. Классификация фототриангуляции в зависимости от применяемых технических средств.
Тема 7.2 Аналитическая пространственная фототриангуляция
Рабочий проект фототриангуляции. Построение фототриангуляции способом частично зависимых моделей. Сущность способа независимых моделей. Построение фототриангуляции способом связок. Понятие о блочной фототриангуляции. Деформация модели и точность построения фотограмметрической сети.
Тема 7.3 Понятие о цифровой модели местности
Назначение цифровых моделей рельефа и область их применения. Ручной и автоматический режим построения ЦМР. Алгоритмы построения ЦМР. Регулярная, адаптивная, гладкая и оптимизация – варианты построения ЦМР в модуле DTM (программа PHOTOMOD).
Раздел 8. Создание топографических карт по наземным снимкам
В результате изучения раздела студент должен:
иметь представление:
-об особенностях выполнения наземной стереофототопографической съемки.
знать:
- сущность выполнения съемки с использованием фототеодолитов, цифровых камер и лазерных сканирующих съемочных систем;
- сущность камеральных работ при выполнении наземной съемки.
уметь:
-пользоваться оборудованием для наземной съемки;
-выполнять обработку наземных снимков на ЦФС.
Тема 8.1 Общая характеристика метода
Области применения наземной стереофототопографической съемки. Фотокамеры, используемые при наземной съемке. Фототеодолиты, универсальные фотограмметрические камеры и стереофотограмметрические камеры. Применение цифровых фотокамер и лазерных сканирующих съемочных систем при наземной съемке.
Тема 8.2 Создание топографических карт по наземным фотоснимкам
Полевые работы при наземной стереофототопографической съемке. Расчеты, выполняемые при работах. Рекогносцировка местности. Геодезические измерения. Фотографирование. Фотолабораторные работы. Дешифрирование. Камеральные работы.
Раздел 9. Понятие о космической съемке
В результате изучения раздела студент должен:
иметь представление:
-об особенностях космической съемки;
-о видах космических траекторий;
-об особенностях фотограмметрической обработки космических снимков.
знать:
- сущность выполнения космической съемки;
- сущность получения космических снимков;
- сущность фотограмметрической обработки космических снимков.
уметь:
-уметь обрабатывать космические снимки.
Тема 9.1 Общие сведения о космической съемке
Особенности космической съемки. Влияние вращения планеты на выдерживание продольного и поперечного перекрытия снимков. Виды космических траекторий. Ориентация космической оси съемочной системы в пространстве. Особенности фотограмметрической обработки космических снимков. Особенности обработки панорамных снимков. Принцип радиолокационной съемки.
Раздел 10. Автоматизация фотограмметрических работ
В результате изучения раздела студент должен:
иметь представление:
-о получении цифровых моделей топографических карт и планов;
-об основных направлениях автоматизации фотограмметрических работ.
знать:
- сущность автоматизации основных процессов обработки снимков;
- сущность автоматизированной обработки снимков при наземной стереофотограмметрической съемке.
уметь:
-привязывать космические снимки, определять масштаб снимка, производить дешифрирование.
Тема 10.1 Автоматизация основных процессов создания карт
Получение цифровых моделей топографический карт и планов. Автоматическая регистрация измерений снимков и программная поддержка построения цифровой модели на ПЭВМ. Автоматизированная обработка снимков при наземной стереофотограмметрической съемке.
ПЕРЕЧЕНЬ РЕКОМЕНДОВАННОЙ ЛИТЕРАТУРЫ
1. Краснощекова И.А., Нормандская О.Б., Кислова A.M., Кислов В.В. Фотограмметрия. - М.: Недра, 1978.
2. Краснопевцев Б.В. Фотограмметрия. – М., МИИГАИК, 2008.
3. Михайлов А.П. «Курс лекций по фотограмметрии». – М., МИИГАИК.
4. Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов. – М.: ЦНИИГАиК, 2002.
5. Лобанов А.Н., Буров М.И., Краснопевцев Б.В. Фотограмметрия. - М.: Недра, 1987.
6. Фельдман М.И., Фостиков А.А. Фотограмметрия. - М., Недра, 1993.
7. Аковецкий В.И. Дешифрирование снимков. - М.: Недра, 1983.
8. Фельдман М.И., Макаренко К.И., Денисюк Б.Д. Лабораторный практикум по фотограмметрии и стереофотограмметрии. - М.: Недра, 1989.
9. Буров М.И., Краснопевцев Б.В., Михайлов А.П. Практикум по фотограмметрии. - М.: Недра, 1987.
10.Обиралов А.И. и др. Практикум по фотограмметрии и дешифрированию снимков. - М.: Недра, 1990.
11.Инструкция по фотограмметрическим работам при создании топографических карт и планов. - М.: Недра, 1974.
12.Основные положения по аэрофотосъемке, выполняемой для создания топографических карт и планов. - М.: Недра, 1982.
13.Сердюков В.М. Фотограмметрия. - М.: Высшая школа, 1983.
14.Руководство по дешифрированию снимков при топографической съемке и обновление карт, масштабов 1 : 2 000 и 1 : 5 000. - М.: ЦНИИГАиК, 1980.
15.Инструкция по дешифрированию аэрофотоснимков и фотопланов в масштабах 1:10 000 и 1 : 25 000 для целей землеустройства, государственного учета и земельного кадастра. - М.: ВИСХАГИ, 1978.
16.Инструкция по топографической съемке в масштабах 1:5 000 - 1:500. - М.: Недра, 1985.
17.Инструкция по топографической съемке в масштабах 1:10000 - 1:25000.— М.: Недра, 1982.
18.Руководство по обновлению топографических карт. - М.: Недра, 1978.
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ИЗУЧЕНИЮ КУРСА
Введение
Литература: /1/, гл.1, §§1-3
Фотограмметрия – научная дисциплина, изучающая способы определения форм, размеров, пространственного положения и степени изменения во времени различных объектов, по результатам измерений их фотографических изображений.
Предметы изучения фотограмметрии это геометрические и физические свойства снимков, способы их получения и использования для определения количественных и качественных характеристик сфотографированных объектов, а также приборы и программные продукты, применяемые в процессе обработки.
В настоящее время в фотограмметрии выделяют три направления исследований. В первом изучаются и развиваются методы картографирования земной поверхности по снимкам. Второе связано с решением прикладных задач в различных областях науки и техники. В третьем развиваются технологии получения информации об объектах Земли, Луны и планет солнечной системы с помощью аппаратуры, установленной на космических летательных аппаратах. Задачи и методы последнего из указанных направлений существенно отличаются от первых двух.
Фототопография решает задачу создания топографических карт и планов и построения цифровых моделей местности с использованием материалов фотосъемки. Она является разделом фотограмметрии. Комплекс процессов, выполняемых для создания по снимкам топографических карт и планов, называется фототопографической съемкой.
Фотограмметрия применяется главным образом для составления топографических карт и планов. Однако в настоящее время она находит все более широкое применение при решении различных прикладных задач. Для какой бы цели не применялась фотограмметрия, основные принципы ее остаются теми же самыми. Фотограмметрическое оборудование, используемое, прежде всего, в картографических целях, можно применить и в других областях науки и техники (для изысканий и проектирования различного рода линейных сооружений, в строительстве при определении качества строительства, в геологоразведочных работах, в геофизике, в архитектуре, в горном деле, в географических исследованиях, в медицине и хирургии, в военном деле и т.д.).
В процессе решения нетопографических задач часто достаточно иметь топографический план с фотопланом, или фотодокументы пониженной точности, цифровую модель участка местности, построенную по измерениям снимков или только измеренные по снимкам координаты точек изучаемого объекта.
Вопросы для самоконтроля
1. Что изучает фотограмметрия?
2. Какие направления исследований выделяют в фотограмметрии?
3. Какую задачу решает фототопография?
4. В каких областях науки и техники применяется фотограмметрия?
5. Для каких целей достаточно иметь план с пониженной точностью?
Раздел 1. Топографическая аэрофотосъемка
Литература: /1/, гл.II, §§4-9; гл.XII, §§96, 99, 104, 105; гл.XIV, §§119-122
Тема 1.1 Аэрофотосъемочные самолеты
Перемещения летательного аппарата в атмосфере – полет – определяется различными силами, характер которых зависит от соотношения веса аппарата и воздуха в соответствующем объеме, направления перепада на элементах его конструкции и других условий в зависимости от используемого принципа полета.
Известны следующие три принципа полета носителей разведывательной аппаратуры в атмосфере: · аэростатический, · аэродинамический, · реактивный.
Основными носителями аэрофотоаппаратуры для топографической аэрофотосъемки являются самолеты. Объединенные общим - аэродинамическим принципом создания подъемной силы, возникающей при поступательном движении несущей поверхности, самолеты существенно различаются своей конструкцией. Особенности схемы самолета определяются его назначением, от которого зависят его размеры, форма, летно-технические данные, характер бортового оборудования и т.д.
Самолеты, предназначенные для воздушного фотографирования местности относят к аэрофотосъемочным самолетам.
Выбор типа самолета для воздушного фотографирования определяется целью и условиями топографической аэрофотосъемки: ландшафтом, характеристиками аэродрома базирования, удаленностью объектов съемки и др.
К аэрофотосъемочным самолетам относится многоцелевой самолет Ан-2, применяемый, как правило, для крупномасштабных съемок небольших участков местности. Переоборудованный вариант двухмоторного самолета Ил-14 – аэрофотосъемочный самолет Ил-14фкМ - длительное время являлся основным носителем фотоаппаратуры для аэросъемок в средних и мелких масштабах. С 1974 года большинство аэрофотосъемочных работ в топографических целях выполняется с помощью аэрофотосъемочного самолета Ан-30, разработанного на базе пассажирских самолетов Ан-24 и Ан-26, созданных под руководством генерального конструктора О. К. Антонова.
Основные летно-технические данные аэрофотосъемочных самолетов
Показатели |
Тип самолета |
||
| Ан-2 |
Ил-14фкМ |
Ан-30 |
|
| Практический потолок, м Крейсерская скорость, км/ч Максим. допустимая скорость гориз. полета, км/ч Миним. допустимая скорость гориз. полета, км/ч Максим. продолжительность полета, ч Разбег при взлете, м Пробег при посадке, м Взлетный вес, кг |
4500 180 - 210 256 100 7 160 215 5250 |
6500 280 - 350 415 175 8 650 500 17500 |
8000 450 - 480 490 240 7 500 660 23000 |
Основными тактическими пилотируемыми носителями разведывательной аппаратуры в настоящее время являются:
·оперативно-тактический самолет-разведчик СУ-24 мр.
·оперативный разведчик-бомбардировщик МИГ-25 рб.
Беспилотным летательным аппаратом называют аппарат, предназначенный для полетов в атмосфере Земли или в космическом пространстве, не имеющий экипажа и управляемый автоматически при помощи бортовых устройств или, на расстоянии, с командного пункта.
За годы, прошедших с начала космической эры - запуска первого в мире советского искусственного спутника Земли, тысячи рукотворных объектов выведены на околоземные и инопланетные орбиты.
Искусственным спутником Земли считается любой космический летательный аппарат (КЛА) после завершения им в свободном полете по околоземной орбите одного витка.
Космическим кораблем (КК) называется летательный аппарат, предназначенный для полета людей в космос (пилотируемый КК) или доставки грузов на орбитальные станции (транспортный КК).
Орбитальной станцией называется пилотируемый или автоматический космический аппарат, функционирующий на орбите искусственного спутника небесного тела (Земли, Луны и т.д.) длительное время.
Вопросы для самоконтроля
1. Что такое полет?
2. Назовите принципы полета носителей аппаратуры в атмосфере.
3. Что является основными носителями аэрофотоаппаратуры для топографической аэрофотосъемки?
4. Чем определяется выбор типа самолета для воздушного фотографирования?
5. Какие аэрофотосъемочные самолетам Вы знаете?
6. Назовите основные летно-технические данные аэрофотосъемочных самолетов.
7. Какие основные тактические пилотируемые носителя разведывательной аппаратуры Вы знаете?
8. Что такое искусственный спутник Земли?
9. Что такое космический корабль?
10. Что такое орбитальная станция?
Тема 1.2 Аэрофотоаппарат и аэрофотоустановка
Аэрофотоаппарат (АФА) служит для получения аэрофотоснимков земной поверхности. Он представляет собой сложную фотографическую систему, отфокусированную на бесконечность и работающую автоматически в сложных условиях вибраций, толчков и перегрузок.
АФА, применяемые при аэрофотосъёмке, классифицируются по целевому назначению, принципу действия, размерам аэроснимка, величине фокусного расстояния и типу используемых фотоматериалов. По целевому назначению они подразделяются на топографические и нетопографические. Схема устройства АФА показана на рис. 1
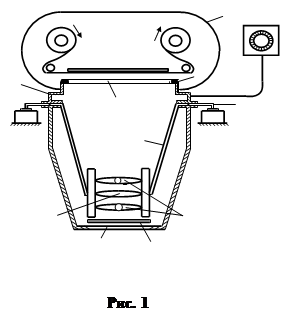 |
Он имеет фотокамеру 1 и кассету 2, как правило, съемную.
Фотокамера состоит из корпуса 5, объективного блока 6 и прикладной рамки 7, к которой в момент экспонирования должен прижиматься эмульсионный слой фотоматериала. В нижней части объективного блока вмонтирован объектив 8. Расстояние от задней узловой точки S2 объектива до плоскости прикладной рамки 7 постоянно и равно фокусному расстоянию АФА. Между компонентами объектива установлены диафрагма 9 и центральный многодисковый затвор. Конструкции затворов рассчитаны на диапазон выдержек от 1/50 до 1/1000 сек. и меньше.
Для надежного выравнивания аэрофотопленки в плоскость прикладной рамки устанавливается выравнивающие плоскопараллельное стекло 10. На нем выгравированы координатные метки, контрольные линии или координатная сетка в виде крестов, с промежутками в 1 или 2 см. В нижней части фотокамеры под объективом устанавливается защитное стекло 11, а между защитным стеклом и объективом – светофильтры 12.
Для топографической аэрофотосъёмки с летательного аппарата кроме АФА используется аэрофотоустановка 4 (рис. 1), оптический визир и командный прибор 3.
Аэрофотоустановка (АФУ) служит для крепления АФА к носителю съёмочной аппаратуры. Командный прибор (КП) служит для дистанционного управления работой фотокамеры. С его помощью устанавливается интервал между экспозициями, выдержка затвора, ведётся счёт кадров.
Для ослабления при аэрофотосъёмке влияния дымки АФА снабжаются светофильтрами ЖС-18, ЖС-16, ОС-14, ОС-12 и КС-14. Их применение приводит к увеличению выдержки и уменьшению в связи с этим исходного контраста некоторых природных объектов. Большинство аэрофотосъёмок производится на чёрно-белые изопанхроматические плёнки различных типов.
Статоскоп представляет собой дифференциальный жидкостной барометр, измеряющий изменение давления воздуха, при изменении высоты полёта.
Радиовысотомер (РВ) служит для определения высот точек фотографирования относительно земной поверхности.
Радиодальномерная станция (РДС) используется для определения плановых геодезических координат центров проекций аэрофотоснимков.
В последние годы в аэрофототопографии все более широко применяют спутниковые методы определения координат, как точек полевой подготовки, так и точек фотографирования.
Вопросы для самоконтроля
1. Предназначение АФА.
2. Как классифицируются АФА?
3. Нарисуйте устройства АФА.
4. Поясните назначение основных узлов АФА.
5. Для чего предназначено АФУ?
6. Для чего применяются светофильтры?
7. Предназначение статоскопа.
8. Предназначение радиовысотомера.
9. Для чего используется радиодальномерная станция?
Тема 1.3 Объектив АФА и его основные характеристики
Изображение в фотокамере строится на плоскости (пленке или пластинке со светочувствительным слоем, или ПЗС матрице) с помощью объектива, представляющего собой сложную оптическую систему собирательных и рассеивающих линз, центры кривизны сферических поверхностей которых расположены на одной прямой линии, называемой главной оптической осью.
Законы геометрической оптики позволяют сложную оптическую систему идеального объектива заменить упрощенной моделью (линзой), сечение которой плоскостью, проходящей через главную оптическую ось, показано на рис. 2.
На нем: R 1 и R 2 – передняя и задняя поверхности объектива; S 1 и S 2 – его передняя и задняя узловые точки; F 1 и F 2 – передний и задний главные фокусы; H 1 и H 2 – главные плоскости объектива (они проходят через точки S 1 и S 2 перпендикулярно главной оптической оси).
Передняя узловая точка S 1 относится к пространству предметов местности и является точкой фотографирования. Задняя узловая точка S 2 относится к пространству изображения и является центром проекции. Узловые точки обладают тем свойством, что любой луч, вошедший в переднюю узловую точку, выйдя из задней узловой точки, не меняет направления. Такие лучи называются центральными.
Главным фокусом объектива (линзы) называется точка схода лучей идущих от бесконечно удаленного предмета, параллельно главной оптической оси. Их два. Плоскости, проходящие через главные фокусы перпендикулярно к главной оптической оси, называются фокальными плоскостями.
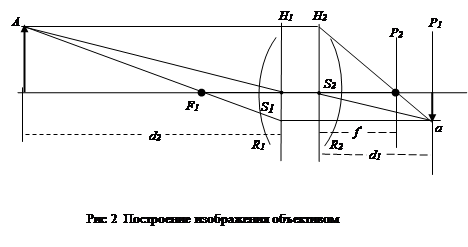 |
Изображение любой точки, например, А , фотографируемого объекта местности строится следующим образом. Луч идущий параллельно главной оптической оси, преломляется на главной задней плоскости H 2 и проходит через задний фокус F 2 . Луч, проходящий через передний фокус F 1 , после преломления на передней главной плоскости H 1 пойдет параллельно оптической оси. В соответствии с законами геометрической оптики центральный луч AS входит в переднюю узловую точку S 1 под углом b к оптической оси и выходит из задней узловой точки S 2 под тем же углом к ней. В результате таких построений все три луча пересекутся в точке a на плоскости P 1 . При этом для точек A и a будет выполняться условие оптического сопряжения
|
|
( |
где d1 – расстояние от плоскости H2 до плоскости изображения P1; d2 – расстояние от плоскости H1 до точки фотографируемого объекта; f – фокусное расстояние объектива (рис. 2).
Говорят, что объектив, изображенный на рисунке строит действительное, уменьшенное и перевернутое (обратное) изображение рассматриваемого объекта.
Фотографические объективы характеризуются фокусным расстоянием, относительным отверстием, глубиной резкости, углами поля зрения и изображения, разрешающей способностью и аберрациями.
Относительное отверстие характеризует количество света, которое может проходить через объектив, или способность объектива передавать изображение на фотопленку или фотопластинку с определенной степенью яркости.
Способность объектива давать изображение большей или меньшей яркости (т.е. создавать большую или меньшую освещенность светочувствительного слоя) называется светосилой.
Глубиной резкости (глубиной изображения) называется способность объектива передавать одинаково резко изображения предметов, находящихся на различных от него расстояниях.
Разрешающая способность объектива характеризует его возможность воспроизводить раздельно в оптическом изображении мелкие объекты.
Каждому объективу присущи оптические недостатки: сферическая аберрация, кома, хроматическая аберрация, дисторсия, астигматизм, кривизна поля зрения.
Фотографические материалы (фотоматериалы) классифицируют:
по назначению (аэрофотопленки, фототехнические пленки и др.);
по цвету получаемого фотографического изображения (черно-белые, спектрозональные и цветные);
по строению (фотопленки, фотопластинки, фотобумага).
В настоящее время цифровые изображения (снимки) в основном получают либо при фотографировании объектов цифровыми камерами, либо путем сканирования их фотографических изображений. И в том и в другом случаях изображение, сформированное посредством объектива, попадает не на пленку, а на светочувствительный сенсор (матрицу). Свет улавливается множеством крошечных элементов сенсора (пикселов), каждый их которых формирует электрический заряд, в соответствии с количеством попавшего на него света, а затем заряд преобразуется в код и запоминается в цифровой форме.
В наземной фототопографической съемке фотографирование местности выполняют фототеодолитами. При решении прикладных задач используются также инженерные и стереофотограмметрические камеры, а иногда любительские фотоаппараты, стереокамеры и кинотеодолиты.
Вопросы для самоконтроля
1. С помощью чего строиться изображение?
2. Изобразите построение изображения объективом.
3. Назовите основные точки и линии при построении изображения объективом.
4. Поясните построение изображения объективом.
5. Какое изображение строит объектив?
6. Чем характеризуются объективы?
7. Что характеризует относительное отверстие?
8. Что такое светосила?
9. Что такое глубина резкости?
10. Что такое разрешающая способность объектива?
11. Классификация фотографических материалов.
12. Как получают цифровые изображения?
13. Чем выполняют фотографирование местности при наземной съемке?
Тема 1.4 Аэрофотосъемочные работы
При аэрофототопографической съемке снимки местности получают путем ее фотографирования. Называют этот этап летносъемочным процессом или аэрофотосъемкой (АФС), осуществляют - с самолёта или другого летательного аппарата. Цель – получение не только фотоснимков, удовлетворяющих заранее поставленным требованиям, но и показаний спецприборов, характеризующих их положение в момент экспонирования. В наземной фототопографической съемке фотографируют фототеодолитом, который устанавливается на штативе.
АФС можно классифицировать по количеству и расположению аэрофотоснимков (одинарная, маршрутная и площадная), положению оптической оси аэрофотоаппарата (плановая и перспективная) и масштабу фотографирования (крупномасштабная - 1: 10 000 и крупнее, среднемасштабная и мелкомасштабная - 1: 35 000 и мельче).
В соответствии с договором на выполнение аэросъемочных работ должны быть определены:
- Масштабы аэрофотосъемки и составляемого плана.
- Тип и фокусное расстояние АФА.
- Необходимость применения специальных приборов (статоскопа, радиовысотомера и др.). Отметим, что в настоящее время не вызывает сомнений необходимость применения при аэрофотосъемке и привязке снимков спутниковых систем.
- Сроки производства аэрофотосъемки и сдачи продукции.
- Состояние местности.
После фотографирования участка местности полученные материалы изучают и оценивают. При этом проверяют:
- полноту и качество аэрофотосъемочных работ;
- соответствие фотографического и фотограмметрического качества материалов требованиям нормативно-технических документов и дополнительным условиям, предусмотренным в договоре на выполнение съемок;
- полноту паспортных данных использованных съемочных систем (элементы внутреннего ориентирования, дисторсия объектива и др.) и соответствие фактических параметров съемочных камер проектным значениям;
- обеспеченность снимками картографируемой территории, ее границ (одновременно составляется схема расположения снимков, подлежащих фотограмметрической обработке, по их номерам);
- наличие, полноту и качество дополнительной бортовой информации (координат центров проектирования снимков, полученных из спутниковых определений, данных инерциальной системы и др.).
Вопросы для самоконтроля
1. Как называется процесс получения аэрофотоснимков?
2. Цель аэрофотосъемки.
3. Классификация АФС.
4. Что должно определяться перед началом АФС?
5. Какие материалы оценивают после производства АФС?
Раздел 2. Теория перспективы и анализ аэрофотоснимка
Литература: /1/, гл.III, §§10-16, гл.IV, §§22-27
Тема 2.1 Центральная и ортогональная проекции
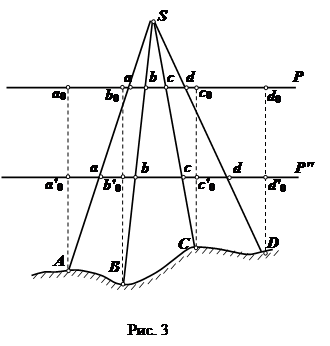
Изображение предмета на плоскости, построенное по определенным правилам, называется проекцией предмета. Процесс построения проекции называется проектированием. Существует несколько видов проекций, наиболее распространенными из которых являются ортогональная и центральная. Центральной проекцией называется проекция, которая строится при помощи лучей, выходящих из одной точки или пересекающихся в одной точке. Ортогональная проекция строится при помощи перпендикуляров, опускаемых из точек предмета на плоскость.
Отличие между ортогональной (горизонтальной) и центральной проекциями видно на рис. 3. Точки местности A, B, C и D изображаются на плоскости Р в центральной проекции в точках a, b, c, d, а в ортогональной проекции – в точках ao, bo, co, do. При перемещении плоскости проекции в положение Р взаимное положение точек ao, bo, co, построенных в ортогональной проекции, не нарушится. В то же время точки a, b, c, построенные в центральной проекции, свое взаимное положение изменят.
Понятно, что для составления плана участка местности по его изображению на снимке необходимо перспективное изображение преобразовать в ортогональное. Но переносом центра проектирования в бесконечность такое преобразование практически не осуществить. Поэтому необходимо найти косвенные пути решения задачи.
 |
Представление об элементах центральной проекции дает рис. 4, на котором изображены:
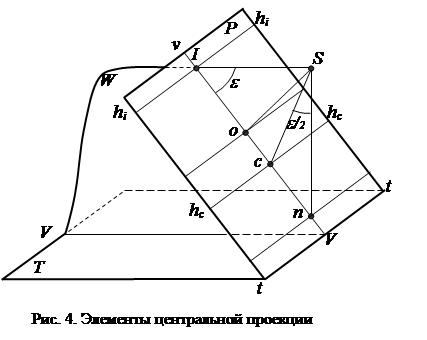 |
- Плоскость Т, в которой располагаются проектируемые точки местности, называется плоскостью основания (плоскостью предмета).
- Плоскость Р, куда проектируются эти точки, называется плоскостью изображения (картины) или плоскостью снимка. Предполагается, что плоскости Т и Р бесконечны и ограничение их линиями является условным.
- Двухгранный угол e между плоскостями снимка и основания – это угол наклона снимка. Он произволен, но если равен нулю, то снимок считается горизонтальным.
- S – центр проекции.
- Проектирующий луч Sо, перпендикулярный к плоскости снимка, называется главным лучом. Он должен совпадать с главной оптической осью фотокамеры, но в точности это не выполняется.
- Точка о пересечения главного луча с плоскостью снимка называется главной точкой, а расстояние Sо - его фокусным расстоянием f. Оно должно быть равно фокусному расстоянию фотокамеры.
- Точка n пересечения отвесного проектирующего луча, с плоскостью снимка называется точкой надира. Она является изображением точки N местности, которая в момент фотографирования находилась на одной отвесной линии (на линии перпендикулярной основанию) с передней узловой точкой объектива фотокамеры.
- Вертикальная плоскость W, проходящая через точки S, о, n называется плоскостью главного вертикала.
- След vv плоскости W на снимке это его главная вертикаль, а след VV плоскости W на основании называется линией направления съемки.
- Горизонтальный проектирующий луч SI, лежащий в плоскости главного вертикала W , пересекает плоскость снимка в главной точке схода I.
- Точка с пересечения биссектрисы угла Sоn (e) с плоскостью снимка называется точкой нулевых искажений. Точки I, o, c и n снимка располагаются на его главной вертикали.
- Линии hh, лежащие в плоскости P и перпендикулярные к главной вертикали, есть горизонтали снимка. Причем, ht ht – линия основания. Это линия пересечения плоскости снимка с плоскостью основания; hc hc - линия неискаженного масштаба – горизонталь, проходящая через точку нулевых искажений c; ho ho – главная горизонталь, она проходит через главную точку снимка о; hi hi – линия действительного (истинного) горизонта – линия пересечения снимка и горизонтальной плоскости (плоскости действительного горизонта), проходящей через центр проекции S.
Вопросы для самоконтроля
1. Что такое проекция?
2. Назовите виды проекций.
3. Покажите отличие центральной и ортогональной hgjtrwbb на чертеже.
4. Назовите основные плоскости центральной проекции.
5. Назовите основные линии центральной проекции
6. Назовите основные точки центральной проекции.
Тема 2.2 Элементы ориентирования аэрофотоснимка
Для установления связей между точками объекта и их фотографическими изображениями используются пространственные и плоские системы координат. Если картографируемый участок захватывает больше, чем 1 зону может использоваться геоцентрическая система координат (рис.5).
 |
В ней за начало координат принят центр общеземного эллипсоида О г , а плоскостью X г Y г является плоскость экватора. Ось X г находится в плоскости начального меридиана, а ось Z г совмещена с полярной осью О г Р . Система координат правая. За фигуру Земли принимается эллипсоид вращения с полуосями а и b и сжатием е . Любая точка О пространства задаётся геодезическими координатами: широтой В , долготой L и высотой Н . Геоцентрические координаты X г , Y г , Z г точки О находят по их геодезическим координатам, с помощью известных формул сфероидической геодезии.
Может использоваться и прямоугольная система координат Xг Yг Zг, представленная на рис.5. Она сохраняет все преимущества геоцентрической системы, но абсолютные значения координат точек в ней меньше. Ось Zг нормальна к поверхности эллипсоида в начальной точке О картографируемого участка; ось Yг совпадает с направлением на север. Система координат правая. За начало счёта высот принимается такое значение, при котором аппликаты всех точек положительны. Координаты Xг, Yг, Zг, легко получаются из геоцентрических Xг, Yг, Zг путём трёхмерного преобразования, включающего перенос начала координат и их вращение.
При решении задач на сравнительно небольшом участке местности используется известная левая система прямоугольных координат
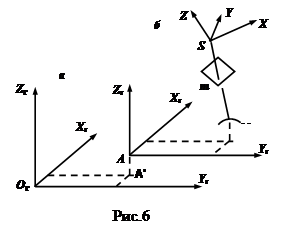 |
Oг Xг Yг Zг (рис.6) Гаусса.
На практике часто находит применение местная система пространственных прямоугольных координат Xг Yг Zг с началом в некоторой точке А картографируемого участка (рис.6). В этой системе ось Zг нормальна к поверхности квазигеоида в точке А, ось Xг горизонтальна и параллельна осевому меридиану зоны, в которой находится участок съёмки, а ось Yг направлена на восток. Координаты начала задаются в системе Ог Xг Yг Zг.
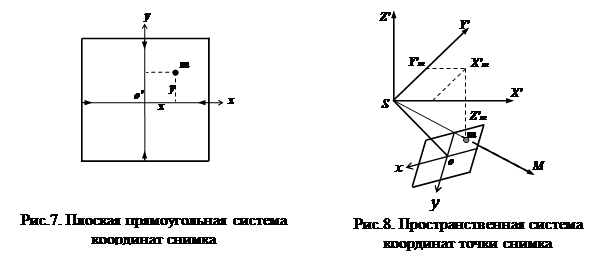
На каждом снимке по его периметру имеется ряд координатных меток, которые определяют плоскую прямоугольную систему координат o x y. Такая система при наличии на снимке четырёх меток 1, 2, 3, 4 показана на рис. 7. Начало координат находится в точке о пересечение отрезков 1-2 и 3-4. Ось x совмещается с прямой 1-2, а ось y с перпендикуляром к оси x в точке о. Возможны и другие варианты. Например, ось y – это главная вертикаль, а ось x - одна из горизонталей и т. д. Отметим, что на наземных снимках оси обозначают буквами x и z, а координаты в системе координат снимка иногда называют фотокоординатами.
Положение точка на снимке определяется координатами x и y, но это можно сделать и в пространственной фотограмметрической системе XYZ (рис.8). Начало координат этой системы всегда совмещено с точкой фотографирования S, а оси X, Y, Z параллельны осям X, Y, Z фотограмметрической системы координат точек объекта местности или осям геодезической системы координат.
Связи между плоскими и пространственными координатами точек снимка и местности устанавливаются через элементы ориентирования снимка.
 |
Элементами ориентирования снимка называются величины, определяющие его положение в момент фотографирования относительно выбранной пространственной прямоугольной системы координат. Различают элементы внутреннего и внешнего ориентирования снимка.
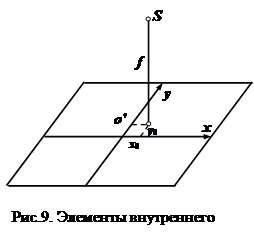 |
Элементы внутреннего ориентирования позволяют найти положение центра проекции относительно снимка, а значит восстановить связку проектирующих лучей, существовавшую в момент фотографирования. К ним относятся координаты главной точки x0 , y0 снимка и фокусное расстояние f фотокамеры (рис.9).
Элементы внешнего ориентирования (ЭВО) позволяют установить положение снимка (связки), которое она занимала в момент фотографирования относительно заданной пространственной прямоугольной системы координат. Для снимков, полученных АФА, на практике используют две таких системы.
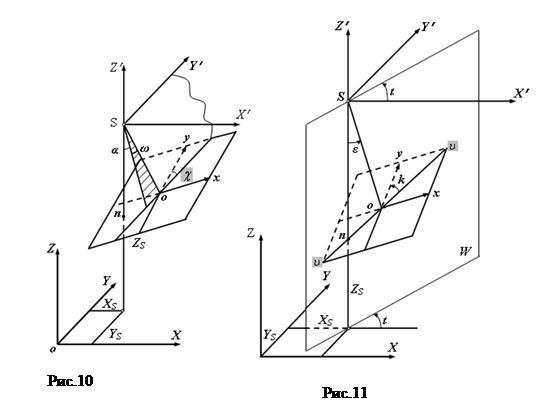
В первую систему ЭВО (рис. 10) входят координаты Xs, Ys, Zs точки фотографирования, а также углы поворота снимка , и
Продольный угол наклона снимка образуется осью Z и проекцией главного луча Sо на плоскость X Z.
Поперечный угол наклона снимка заключён между главным лучом Sо и его проекцией на плоскость X Z.
Угол поворота снимка образуют ось у снимка и след плоскости, проходящей через главный луч Sо и ось Y (в этой плоскости находится угол ).
На рис. 10 углы и положительные, угол - отрицательный.
Вторая система (рис.11) ЭВО содержит:
координаты Xs, Ys, Zs точки фотографирования;
t – дирекционный угол оптической оси фотокамеры – он образуется следом плоскости главного вертикала W и положительным направлением оси X;
- угол наклона снимка, находится в плоскости главного вертикала между главным и надирным лучами;
– угол поворота в плоскости снимка, образуется главной вертикалью ![]() и осью y плоской системы координат x y.
и осью y плоской системы координат x y.
 |
Вопросы для самоконтроля
1. Назовите системы координат, используемые в фотограмметрии.
2. Отобразите на чертеже геоцентрическую систему координат.
3. Отобразите на чертеже плоскую прямоугольную систему координат снимка.
4. Отобразите на чертеже пространственную систему координат точки снимка.
5. Назовите элементы внутреннего ориентирования снимка и отобразите их на чертеже.
6. Назовите предназначение элементов внешнего ориентирования снимка.
7. Отобразите на чертеже первую систему элементов внешнего ориентирования снимка.
8. Отобразите на чертеже вторую систему элементов внешнего ориентирования снимка.
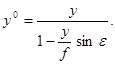
Тема 2.3 Масштаб аэрофотоснимка
Масштабом снимка 1/m в данной точке по данному направлению называется отношение бесконечно малого отрезка dl на снимке к соответствующему отрезку dL на местности. То есть:
|
|

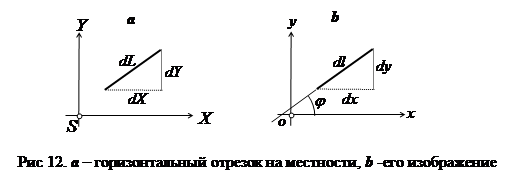 |
Пусть местность равнинная, а начала координат в пространстве и на снимке расположены соответственно в точках S и o , (рис. 12).
Обозначив проекции отрезков dl и dL на соответствующие координатные оси через dx , dy и dX , dY , с учетом данного определения масштаба и рис. 22 напишем:
|
|
где – угол между осью x снимка и заданным направлением отрезка dl .
При указанном выборе систем координат, и при условии, что оси ординат расположены в плоскости главного вертикала, справедливы формулы зависимости между координатами точек местности и снимка
![]() и
и ![]()
Введём обозначение:
![]() .
.
После преобразований получим:
|
|
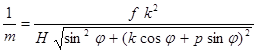 .
.Полученное равенство показывает, что масштаб снимка зависит от фокусного расстояния АФА, высоты фотографирования, угла наклона снимка, положения точки на снимке (координат x и y), в которой взят элемент dl и от направления этого элемента относительно линии главного вертикала ![]() .
.
Определим значение масштаба 1/m для частных случаев.
1. Масштаб горизонтального снимка ( = 0):
![]() ,
,
т. е. масштаб горизонтального снимка плоской местности во всех точках постоянный.
2. Масштаб наклонного снимка по направлению главной вертикали (x = 0, = 90°):
|
|
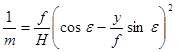 .
.В главной точке снимка o (y = 0)
![]() ;
;
В точке нулевых искажений с ![]() , поэтому:
, поэтому:
![]() ;
;
В точке надира n ![]() , после подстановки получаем:
, после подстановки получаем:
![]() ;
;
В главной точке схода ![]()
![]() .
.
3. Масштаб наклонного снимка по направлению горизонтали ( = 0°)
|
|
Поскольку в уравнении абсцисса точки отсутствует, то вдоль горизонтали, если местность равнинная, масштаб величина постоянная.
Запишем выражения 1/m для горизонталей, проходящих через характерные точки снимка:
По линии действительного горизонта ![]() , поэтому:
, поэтому:
![]() ;
;
Вдоль главной горизонтали ![]() :
:
![]() ;
;
На линии неискажённого масштаба ![]() , значит
, значит
![]() ;
;
По горизонтали hn
hn
, проходящей через точку надира ![]() , и:
, и:
![]() .
.
Выполненный анализ показал, что масштаб снимка в точке c по любому направлению равен масштабу горизонтального снимка.
Вопросы для самоконтроля
1. Что такое масштаб снимка?
2. Покажите на чертеже геометрическую сущность масштаба.
3. От чего зависит масштаб изображения?
4. Чему равен масштаб горизонтально снимка?
5. Чему равен масштаб наклонного снимка по направлению главной вертикали?
6. Чему равен масштаб наклонного снимка по направлению горизонтали?
Тема 2.4 Искажения на аэрофотоснимке
Под влиянием угла наклона аэрофотоснимка возникают линейные и угловые искажения изображения на снимке.
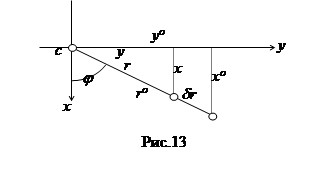
Зависимость между координатами горизонтального и наклонного снимков можно отметить с помощью строгих и простых соотношений. Их можно написать, если начало координат на снимке и на местности совместить с точкой нулевых искажений с:
|
|
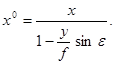 ,
, 
Из зависимостей между координатами горизонтального и наклонного снимков можно сделать вывод:
![]()
Это означает, что если наклонный снимок совместить с горизонтальным, вращением его вокруг линии неискаженных масштабов (рис. 13.) то соответствующие точки окажутся на одном луче, проходящем через точку нулевых искажений c .
Величина смещений точек за наклон снимка будет равна:
|
|
Смещение ![]() возможно как в сторону точки нулевых искажений, при j(0°, 180°), так и в противоположную сторону. Максимально оно на главной вертикали (
равно 90° или 270°). На линии неискаженных масштабов точки за наклон не смещаются.
возможно как в сторону точки нулевых искажений, при j(0°, 180°), так и в противоположную сторону. Максимально оно на главной вертикали (
равно 90° или 270°). На линии неискаженных масштабов точки за наклон не смещаются.
Величину максимального смещения точек можно оценивать по приближенной формуле:
|
|
Оно приводит к ошибкам в определении по снимкам направлений, расстояний и площадей.
Рельеф местности также вызывает смещение точек, причем по направлениям проходящим через точку надира n, в которую сходятся изображения отвесных прямых. То есть, если h - превышение точки А над точкой В, расположенной в плоскости предмета, и отрезок АВ отвесный, то точка а на снимке сместится относительно точки b на величину ab = rh (рис. 14). При h 0 смещение происходит от точки надира, когда h 0, – к точке надира.
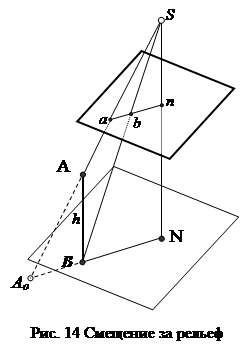 |
Величину смещения точки за рельеф можно оценить по формуле:
|
|
Полученная формула дает хорошую оценку величины смещения точек за рельеф и для плановых снимков. Значит, по измеренной на плановом снимке величине смещения ![]() можно в ряде случаев с достаточной для практики точностью определить высоту отдельных объектов (дерева, столба, здания, трубы и т. д.).
можно в ряде случаев с достаточной для практики точностью определить высоту отдельных объектов (дерева, столба, здания, трубы и т. д.).
Вопросы для самоконтроля
1. Под влиянием чего на снимке возникают искажения?
2. Проиллюстрируйте на чертеже искажения за наклон снимка.
3. Чему равна величина смещений точек за наклон снимка?
4. Проиллюстрируйте на чертеже искажения за рельеф местности.
5. Чему равна величина смещений точек за рельеф местности?
Раздел 3. Создание фотопланов и фотосхем
Литература: /1/, гл.VI, §§32-34, §§40-42, гл.VII, §§43-44.
Тема 3.1 Цель, принцип и способы трансформирования
Некоторые технологические варианты стереотопографической АФС предусматривают составление фотопланов или ортофотопланов. Фотоплан (ортофотоплан) это фотографическое изображение местности составленное из трансформированных снимков (ортофотоснимков) одного масштаба. Как правило, их составляют на полную трапецию, и выполняют зарамочное оформление, как у плана. По точности они должны соответствовать плану. Фотографическое изображение местности, составленное из плановых снимков, называется фотосхемой. Их точность ниже точности фотопланов, поэтому они используются для приближенных количественных оценок в лесоустройстве, землеустройстве и т.д. Фотосхемы бывают одномаршрутные и многомаршрутные.
Трансформирование снимка в широком смысле это целенаправленное изменение его геометрических свойств с целью преобразования в заданную проекцию. Трансформирование – процесс преобразование фотоснимков из наклонных в горизонтальные с одновременным приведением их к заданному масштабу.
Принцип трансформирования состоит в том, что по снимку можно восстановить связку проектирующих лучей такой, какой получался в АФА при съемке, а при помощи этих лучей спроектировать изображение снимка на горизонтальную поверхность.
 Допустим, на наклонном фотоснимке P получено изображение участка Т плоской горизонтальной местности: точки a и b – изображения точек А и B. Фотоснимок P занимает относительно местности положение, которое он занимал в момент фотографирования. Следовательно, между плоскостями P и Т существует перспективное соответствие.
Допустим, на наклонном фотоснимке P получено изображение участка Т плоской горизонтальной местности: точки a и b – изображения точек А и B. Фотоснимок P занимает относительно местности положение, которое он занимал в момент фотографирования. Следовательно, между плоскостями P и Т существует перспективное соответствие.
Если связку лучей пересечь экраном Е параллельно плоскости Т, то перспективное соответствие будет не только между плоскостями P и Т, но и между фотоснимком P и плоскостью экрана Е. Поэтому проектирующие лучи связки, пересекая экран, образуют изображение, соответствующие горизонтальному фотоснимку.
Масштаб полученного трансформированного изображения будет зависеть от удаления Z экрана Е от центра проекции S (объектива проектора).
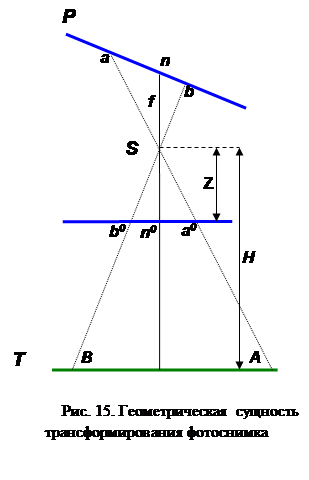
Из рис. 15 следует, что
![]()
![]()
где Z – расстояние от центра проекции S до плоскости трансформирования Е;
Н – высота фотографирования;
t – знаменатель масштаба трансформированного изображения.
Вопросы для самоконтроля
1. Когда применяется трансформирование?
2. Что такое фотоплан и фотосхема?
3. Области применения фотоплана и фотосхемы.
4. Дайте определение трансформирования.
5. В чем состоит принцип трансформирования?
6. Покажите на чертеже геометрическую сущность трансформирования.
7. Чему равен масштаб трансформированного изображения?
Тема 3.2 Технические средства для трансформирования
Прибор, с помощью которого реализуется, технология трансформирования называется фототрансформатор. По существу это усовершенствованный высокоточный фотоувеличитель. Основными частями фототрансформатора являются: направляющие, экран, кассета, объектив и источник света с параболическим отражателем. Имеется, кроме того, система винтов и устройств, обеспечивающих путем взаимного перемещения кассеты, объектива и экрана построение на экране трансформированного изображения в заданном масштабе.
Различают фототрансформаторы I и II рода. В фототрансформаторах I рода трансформирование выполняется при сохранении той связки проектирующих лучей, которая существовала в момент фотографирования. Они не получили распространения, т.к. при изменении увеличения для получения резкого изображения необходимо менять проектирующий объектив. На производстве применяли только фототрансформаторы II рода, у которых фокусное расстояние объектива является величиной постоянной, не равной фокусному расстоянию АФА.
Задача трансформирования в приборах II рода решается методом построения преобразованной связки лучей.
Для правильного трансформирования необходимо выполнить геометрические условия, а для получения резкого изображения должны выполняться оптические условия трансформирования. У большинтсва фототрансформаторов геометрические условия выполняются оператором. Для выполнения оптических условий предназначены специальные устройства – инверсоры. В нашей стране наибольшее распространение получили фототрансформаторы ФТБ, ФТМ, ФТА, а так же Ректимат («Карл Цейс Йена») и универсальный топографический проектор УТП.
Основные характеристики фототрансформаторов:
| Характеристики |
ФТБ |
ФТМ |
Ректимат |
| Формат негативов |
18*18,24*24,30*30 |
18*18,24*24,30*30 |
30*30 |
| Тип объектива |
«Луч» |
«Луч» |
«Трансформар-1» |
| Фокусное расстояние |
180 |
180 |
150 |
| Коэффициент трансформирования |
0.6-5.7 |
0.7-2.5 |
0.85-18.0 |
| Формат экрана, см |
100*100 |
60*60 |
120*110 |
| Размер прибора, м |
1.5*1.2*3.0 |
0.95*1.2*2.5 |
1.2*2.2*3.0 |
| Масса прибора, кг |
700 |
200 |
1000 |
Вопросы для самоконтроля
1. Назовите приборы для трансформирования.
2. В чем отличие фототрансформаторов 1 и 2 рода?
3. Какие условия необходимо выполнить для правильного трансформирования?
4. Какие фототрансформаторы Вам известны?
5. Приведите основные характеристики фототрансформаторов.
Тема 3.3 Трансформирование аэрофотоснимков
Для того чтобы понять суть фотомеханического трансформирования (его еще называют оптико-механическим), предположим, что элементы внутреннего и внешнего ориентирования снимка известны. Восстановим связку проектирующих лучей и поместим ее в положение, которое она занимала в момент фотографирования, затем пересечем связку горизонтальной плоскостью E ( рис. 16).
В результате на экране получим трансформированное изображение наклонного снимка.
![]()
На практике, установку связки относительно экрана выполняют по опознакам. Для этого на экран укладывают основу с, опознаками (их должно быть не менее четырех), выполненную в масштабе, который равен заданному масштабу трансформированного изображения. На снимке делают отверстия (диаметром 0.2 – 0.3 мм) в точках, где изобразились опознаки, и с помощью проектора проецируют его на экран. Затем взаимным перемещением основы и проектора добиваются, чтобы изображения спроектированных на экран отверстий совпали с соответствующими трансформационными точками на основе, после чего последнюю убирают. В результате изображение на экране будет соответствовать трансформированному снимку. Его нужно только зафиксировать, например, сфотографировать.
Трансформированием снимков может выполняться и цифровыми методами. При создании и обновлении карт различного назначения по аэрокосмическим снимкам создаются трансформированные изображения местности в проекции карты. Эти изображения могут быть созданы по одиночным снимкам или по нескольким перекрывающимся снимкам. Цифровое трансформирование выполняется с точностью, соответствующей точности предъявляемой действующими нормативными документами к точности карт соответствующего масштаба.
Цифровые трансформированные изображения используют для создания контурной части карт, путем векторизации цифровых изображений в среде CAD или ГИС, а также как самостоятельные картографические документы. Процесс цифрового трансформирования состоит из двух этапов. На первом этапе процедура геометрического трансформирования создает «бланк» подходящего размера и устанавливает масштаб (размер пиксела). На втором - определяются пиксельные значение (плотности) каждого пиксела трансформированного изображения. С этой целью, изменяются параметры геометрического трансформирования каждого выводимого пиксела, для того чтобы определить его положение в системе координат строк и столбцов исходного растрового изображения.
Принципиальная схема цифрового трансформирования снимков представлена на рис.17. Исходными материалами при цифровом трансформировании снимков служат: цифровое изображение исходного фотоснимка; цифровая модель рельефа (в большинстве случаев используется регулярная сетка ЦМР в виде сетки квадратов на местности); элементы внутреннего и внешнего ориентирования снимка; параметры внутреннего ориентирования снимка в системе координат цифрового изображения.
![]()
Вопросы для самоконтроля
1. Покажите графически суть трансформирования.
2. Как на практике происходит установка связки проектирующих лучей.
3. С какой точностью выполняется цифровое трансформирование?
4. Для чего используются цифровые трансформированные изображения?
5. Проиллюстрируйте суть цифрового трансформирования.
6. Какие материалы используются для цифрового трансформирования?
Тема 3.4 Создание фотоплана и фотосхемы
В зависимости от целевого назначения различают фотопланы топографические и специальные. Первые составляют в общегосударственной разграфке с соблюдением инструкций и наставлений по топографическим съемкам. Специальные фотопланы составляют, как правило, в произвольной разграфке, и они должны удовлетворять требованиям ведомственных инструкций. В отличие от графического плана, фотопланы обладают большей наглядностью, поэтому многими специалистами и используются. На них могут быть нанесены горизонтали. В результате получается фотокарта.
Фотопланы составляют из трансформированных снимков путем монтажа их на основе по опорным точкам. Иногда их составляют из плановых снимков, если при фотографировании местности применялись АФА с гиростабилизирующей установкой.
Фотоплан составляют на жесткой основе (бумаге, наклеенной на алюминий, авиационной фанере или пластике), на которой по координатам в заданном масштабе нанесены опознаки, пункты геодезической сети и трансформационные точки. Выполняют это либо путем монтажа отдельных фотоснимков либо путем оптического монтажа с одновременным трансформированием по зонам. Основными процессами составления первым из названных способов являются: подготовительный, монтаж снимков, контроль качества фотоплана и его оформление.
Подготовительные работы включают: подбор фотоснимков по трапециям и по маршрутам в пределах трапеции; контроль их качества и точности трансформирования; пробивку пуансоном отверстий диаметром около 1 мм на всех опорных, трансформационных точках, и пунктах геодезической сети. Контроль точности трансформирования выполняют путем совмещения отверстий на снимке с соответствующими точками на основе так, чтобы отклонение центров отверстий от точек были одинаковыми. Снимки, для которых эти отклонения превышают 0.4 мм, а также снимки с резкими изменениями фототона трансформируют заново.
Монтаж начинают с левого снимка северного маршрута. Его укладывают на основу, усредняют погрешности совмещения центров отверстий с точками на основе и закрепляют грузиками. Затем на основу укладывают второй снимок, так же совмещают отверстия с опорными точками и, закрепив его, проверяют сходимость контуров в зоне перекрытия. Для этого накалывают четкий контур на верхнем снимке и проверяют, где он оказался на нижнем снимке. Отклонение накола от контура не должно превышать 0.7 мм. После этого разрезают оба снимка одновременно примерно посередине продольного перекрытия. Линия пореза не должна проходить через ответственные контуры и вдоль линейных объектов. Обрезки от каждого снимка сохраняют для последующего контроля, а соответствующие части первого и второго снимков наклеивают на основу. Аналогичные операции выполняют при соединении второго и последующих снимков маршрута, а также при монтаже снимков смежных маршрутов. Но в последнем случае контроль сходимости контуров, а также порез, осуществляют и по поперечным перекрытиям.
Цифровые фотопланы могут быть созданы по перекрывающимся цифровым трансформированным снимкам. На рис.18 представлен принцип формирования цифрового фотоплана.
Для его создания используются трансформированные снимки с одинаковым размером пикселов и имеющие координаты начал систем координат цифровых изображений O1 и O2 кратные размеру пиксела.
При создании цифрового фотоплана в зоне перекрытия трансформированных снимков проводят линию пореза в виде полилинии с узлами Ki . Затем, с ее помощью в каждой строке определяют граничные пикселы, совмещенные с линией пореза, и приступают к формированию матрицы цифрового фотоплана.
Координаты начала системы координат цифрового фотоплана XOM принимаются равными наименьшему значению координат XO 1 и XO 2 начал систем координат цифровых трансформированных снимков, а YOM – наибольшему значению координат YO 1 и YO 2 .
Каждая строка матрицы фотоплана формируется из строки трансформированного снимка P1 , включая граничный пиксел и строки снимка P2 , начиная с пиксела, следующего за граничным. Таким методом можно присоединить к созданному фотоплану другие перекрывающиеся снимки.
Вопросы для самоконтроля
1. Какие виды фотопланов Вы знаете?
2. Что представляет из себя фотокарта?
3. Из каких снимков монтируют фотопланы?
4. Назовите процессы монтажа фотопланов.
5. Раскройте процессы монтажа фотопланов.
6. Нарисуйте схему создания цифрового фотоплана.
7. Поясните процесс создания цифрового фотоплана.
Раздел 4. Дешифрирование снимков
Литература: /6/, /13/, /14/.
Тема 4.1 Общие сведения о дешифрировании
Под дешифрированием понимается выявление, распознавание и определение характеристик объектов местности, изобразившихся на фотоснимках.
Виды дешифрирования:
- топографическое;
- специальное (с/х, лесное, геологическое, экологическое, военное, гидрологическое и т. д.).
Топографическое - показывает информацию об элементах на поверхности Земли (количественно и качественно).
Специальное - позволяет проводить региональное и топологическое районирование местности для изучения процессов, происходящих на поверхности Земли для решения специальных задач.
Методы дешифрирования:
а) полевое;
б) аэровизуальное;
в) камеральное;
г) комбинированное;
Дешифровочные признаки:
1. прямые,
2. косвенные,
3. комплексные.
Прямые те свойства объектов, которые передаются непосредственно и воспринимаются дешифровщиком однозначно. К прямым относятся: форма, размер, тень, фототон, структура, протяженность.
Косвенные дешифровочные признаки указывают на наличие или характеристику объекта, не изобразившегося на снимке или неопределённого по прямым признакам, а также устраняют многозначность или неопределённость прямых признаков.
Комплексные дешифровочные признаки - это сочетание прямых и косвенных признаков.
Дешифрирование по эталонам
Эталон - образец дешифрирования. Они составляются на наиболее сложные участки, когда имеются сочетания не менее пяти фототонов.
Эталоны бывают отраслевые и комплексные. Отраслевые содержат характеристики какого-либо одного элемента ландшафта, например, только рельефа, только болот и т.д. Комплексные эталоны сопровождаются многоотраслевой аннотацией природных явлений или условий.
Приборы для дешифрирования фотоизображений, определения числовых характеристик объектов местности.
К ним относятся:
стереоскопы, микроскопы, измерительные лупы и т. д. – для дешифрирования аналоговых изображений (ПКДФ, СИ-2, МБС-1, 2, 9, СЛЗ, ПС и др.);
оптические и электронные экраны – для рассматривания и дешифрирования цифровых изображений (АРМ, АЦФС и др.).
Вопросы для самоконтроля
1. Дайте определение дешифрирования.
2. Назовите виды дешифрирования.
3. Назовите методы дешифрирования.
4. Какие группы дешифровочных признаков Вам известны?
5. Перечислите прямые дешифровочные признаки.
6. Что такое эталон дешифрирования? Какие виды эталонов Вы знаете?
7. Назовите приборы для дешифрирования изображений объектов местности.
Тема 4.2 Топографическое дешифрирование снимков
Топографическое дешифрирование выполняют с целью выявления, распознавания и определения характеристик объектов местности, которые должны наноситься на план в соответствии с требованиями действующих условных знаков. Дешифрирование снимков в процессе обследования местности в натуре называется полевым. Распознавание на фотоизображениях объектов и контуров без обследования их в натуре называется камеральным дешифрированием. В зависимости от топографической изученности картографируемого района и принятой технологии работ полевое дешифрирование проводится до камерального или после него.
Полевое дешифрирование ведут, как правило, по маршрутам, которые намечают там, где расположены объекты, подлежащие обязательному обследованию в натуре (поселки, мосты, ЛЭП, трубопроводы и проч.).
Камеральное дешифрирование значительно дешевле полевого, но для успешного его выполнения необходимо изучать дешифровочные, или, как их еще называют, демаскирующие признаки объектов.
Камеральное дешифрирование аэрокосмических снимков позволяет опознать и получить количественные характеристики подавляющего большинства объектов местности, изображаемых на создаваемых картах и планах. Достоверность и полнота дешифрирования снимков зависят в значительной степени от организации работ.
Камеральное дешифрирование аэрофотоснимков требует следующего порядка работ:
·подготовка к камеральному дешифрированию аэрофотоснимков;
·дешифрирование снимков и получение количественных характеристик объектов;
·сводка и корректура дешифрованных аэрофотоснимков;
·поверка результатов камерального дешифрирования в поле.
При камеральном дешифрировании обычно используются основные и дополнительные исходные материалы.
К основным исходным материалам относят аэрофотоснимки, эталоны и маршруты полевого дешифрирования, цветные тиражные оттиски карт.
К дополнительным исходным материалам относят раннее изданные топографические карты, ведомственные картографические, литературно-справочные материалы и т.д.
Основой методики камерального дешифрирования аэрофотоснимков является использование дешифровочных признаков объектов. Дешифровочные признаки при обнаружении и опознавании объектов следует применять комплексно. При этом вначале рекомендуется использовать прямые, а затем косвенные признаки объекта.
Дешифрирование по элементам содержания карты производится в следующем порядке:
·гидрография и сооружения при ней;
·населенные пункты, промышленные и сельскохозяйственные предприятия и сооружения;
·ориентиры и отдельные постройки вне населенных пунктов;
·дорожная сеть и сооружения при ней;
·линии электропередач и связи;
·элементы рельефа не выражающиеся горизонталями;
·растительный покров и грунты.
Дешифрирование снимков со специфическими природными условиями может производится и в другой последовательности. Например, дешифрирование снимков пустынных районов следует начинать с выявления дорог, колодцев и т.д.
В процессе дешифрирования производится контроль, как самим исполнителем, так и руководителем работ. Самоконтроль исполнителя камерального дешифрирования заключается в повторном опознавании изображений наиболее трудных объектов.
По окончании камерального дешифрирования тщательная корректура каждого снимка производится корректорами, выделенными из наиболее подготовленных топографов.
При корректуре дешифрированных снимков проверяется:
·полнота камерального дешифрирования и правильность применения условных знаков;
·полнота и правильность цифровых характеристик дешифрированных объектов;
·правильность отбора и генерализации дешифрованных объектов;
·соответствие результатов камерального дешифрирования полевым эталонам;
·правильность подписей собственных названий объектов;
·качество сводок дешифрованных снимков.
Вопросы для самоконтроля
1. Цель топографического дешифрирования снимков.
2. Как производится полевое дешифрирования снимков?
3. В чем достоинство камерального дешифрирования?
4. Какие материалы для дешифрирования Вам известны?
5. Назовите порядок работ при камеральном дешифрировании снимков.
6. Может ли выбираться иной порядок камерального дешифрирования и от чего это зависит?
7. Что проверяется при корректуре снимков?
Тема 4.3 Понятие о дешифрировании космических снимков
Космические снимки обладают новыми по сравнению с аэрофотоснимками качествами, обусловливающими особенности их дешифрирования.
Потенциальные возможности фотографического метода съемки очень велики и соотношение масштаба оригинальных космических снимков и масштабов карт, для создания которых они используются, может быть достаточно большим. Космические снимки применяются для обновления элементов топографических карт и для создания карт различных масштабов.
Кроме дешифрирования можно назвать и другие области применения космических снимков при создании и обновлении топографических карт:
проектирование топографических работ;
проведение рекогносцировочных полевых обследований;
учет информации об изменениях местности;
редактирование топографических карт, разработка редакционных документов, особенно ландшафтных схем, согласование карт, увязка содержания смежных листов карт и т. д.
В силу большой обзорности и охвата значительных по площади территорий при дешифрировании космических снимков приходится исходить не из непосредственного знания местности, а из сведений, полученных о ней из различных материалов, главным образом картографических.
При дешифрировании космических снимков так же, как и при работе с аэроснимками, оперируют прямыми дешифровочными признаками и их сочетаниями и косвенными признаками.
Дешифрирование космических снимков в настоящее время производится в основном на ЦФС, которые предназначены для обработки цифровых снимков. Цифровые фотограмметрические станции, разработанные в России, как правило, содержат только программное обеспечение и могут устанавливаться на любом современном компьютере.
Цифровая стереофотограмметрическая станция ЦСС–2. Разработана ЦНИИГАиК и Госцентром «Природа» в 1996. ЦСС-2 производит высокоточную стереофотограмметрическую обработку цифровых аэрокосмических снимков с целью создания и обновления топографических карт и планов и выполняет все виды фотограмметрических процессов по обработке одиночных и стереоскопических снимков.
Цифровая фотограмметрическая система «Талка». Разработана в Институте проблем управления РАН. Система предназначена для создания цифровых ортофотопланов и фотосхем, измерительных стереомоделей для векторизации в стерео режиме, цифровых моделей рельефа местности, производства кадастровых планов и топографических электронных карт с использованием космических и аэрофотосъемочных материалов.
Цифровая фотограмметрическая станция (ЦФС). Разработана ЦНИИГАиК и предназначена для обновления по одиночным аэрокосмическим снимкам цифровых, электронных карт и планов городов по результатам дешифрирования.
Цифровая фотограмметрическая станция «Дельта». Разработана в 1998г. научно-производственной лабораторией «Геосистема» производственного объединения «Аэрогеоприбор». ЦФС «Дельта» предназначена для обработки аэрокосмических снимков с целью получения картографических материалов, цифровых карт и планов и ортофотопланов.
Система многофункциональной фотограмметрической обработки стереопарных изображений PHOTOMOD. Разработана фирмой «Ракурс» в 1994 г. PHOTOMOD позволяет осуществлять полный фотограмметрический цикл обработки стереопарных изображений.
Программно–технический комплекс «Садко» (Система Автоматизированного Дешифрирования Космических Снимков) разработан в 29 НИИ, 38 ЦАФТО, г. Москва в 1998 г. Предназначен для автоматизированного дешифрирования результатов дистанционного зондирования Земли.
Вопросы для самоконтроля
1. Назовите области применения космических снимков.
2. Какие дешифровочные признаки применяют при работе с космическими снимками?
3. На каких технических средствах происходит обработка космических снимков в настоящее время?
4. Кратко охарактеризуйте цифровые фотограмметрические приборы, предназначенные для обработки космических снимков, которые Вам известны.
Раздел 5. Основы стереозрения
Литература: /1/, гл.VIII, §§45-57, гл.XII, §§58,59; §§60-63.
Тема 5.1 Стереопара аэрофотоснимков и стереомодель
Главной задачей фотограмметрии в применении ее для топографии является определение координат точек местности по аэрофотоснимкам. Используя одиночный аэрофотоснимок, можно определить лишь плановое положение точек, изобразившихся на нем.
Для определения высот точек местности необходимо иметь два аэрофотоснимка данного участка, полученных из двух разных точек или с двух концов базиса фотографирования. Два снимка с изображениями одного и того же участка местности, полученные с двух точек пространства, называются стереоскопической парой снимков (стереопарой). Снимок, полученный с точки фотографирования S 1 , называется левым, а с S 2 – правым.
На рис. 19 изображена пара снимков в положении, которое она занимала в момент фотографирования. А – точка местности, изобразившаяся на снимках в точках а 1 и а 2 .

Они называются соответственными или одноимёнными точками. Проектирующие лучи S 1 A и S 2 A , проходящие через эти точки называются соответственными или одноимёнными проектирующими лучами.
Расстояние В между точками фотографирования S 1 и S 2 – базис фотографирования.
Плоскость W A , проходящая через базис и точку А местности есть базисная плоскость.
Плоскости, проходящие через базис фотографирования и главные лучи являются главными базисными плоскостями (W 1 - левого W 2 - правого снимков).
Любая пара соответственных лучей пересекается, если снимки занимают положение, которое было в момент фотографирования. Совокупность их точек пересечения образует поверхность. Ее называют стереомоделью или просто моделью местности. При выше названных условиях она совпадает с земной поверхностью, значит масштаб такой модели 1:1.
Представим теперь, что одна из связок (например, правая) поступательно перемещается вдоль базиса из положения S 2 в S 2 . Модель при этом не разрушится, но изменится ее масштаб. Расстояние b п между центрами проекций двух связок, по которым построена модель, называется базисом проектирования.
Ее масштаб вычисляется по формуле:
|
|
Вопросы для самоконтроля
1. Дайте определение стереопары снимков.
2. Отобразите графически стереопару снимков.
3. Какие проектирующие лучи называются соответственными?
4. Что такое базис фотографирования?
5. Что такое главные базисные плоскости?
6. Дайте определение стереомодели.
7. По какой формуле можно вычислить масштаб стереомодели?
Тема 5.2 Координаты и параллаксы точек стереопары
Положение соответственных точек на стереопаре фотоснимков определяется в плоских прямоугольных системах координат o 1 x 1 y 1 и o 1 x 2 y 2 (рис. 20). Начала систем координат о1 и о2 находятся в точках пересечения прямых, соединяющих противоположные координатные метки фотоснимков 1 и 2 (1 и 2) и 3 и 4 (3 и 4), ось х совмещают с прямой 1—2 (1—2), а у — с прямой 3—4 (3—4). Координатами точки а1 являются х1 , у1 , а точки а2 — х2 , у2.
![]()
Координаты соответственных точек в общем случае не равны, т. е. х1 х2 и y 1 y 2 Это означает, что точка на левом фотоснимке a 1 по отношению к выбранной системе координат o 1 x 1 y 1 расположена не так, как точка на правом фотоснимке а2 относительно системы координат и o 1 x 2 y 2 . Иначе говоря, существуют смещения точек на стереопаре фотоснимков.
Смещения соответственных точек на фотоснимках стереопары называют параллаксами. Они имеют место как по оси абсцисс, так и по оси ординат. Смещение вдоль оси абсцисс называется продольным параллаксом и обозначается буквой р. Смещение вдоль оси ординат называется поперечным параллаксом и обозначается буквой q .
Наложим фотоснимок Р1 стереопары на Р2 так, чтобы их системы координат совпали. Точка левого фотоснимка а1 займет положение а2 , т. е. сместится параллельно оси абсцисс на величину р и на величину q — параллельно оси ординат.
Продольный параллакс выражается разностью абсцисс соответственных точек:
р = х1 – х2
а поперечный — разностью ординат этих точек:
q = у1 - у2
Вопросы для самоконтроля
1. Какая система координат применяется для определения координат точек снимка?
2. Что такое параллаксы точек стереопары?
3. По каким осям координат бывают параллаксы?
4. приведите формулу для вычисления продольного и поперечного параллаксов.
Тема 5.3 Элементы взаимного ориентирования стереопары
Взаимное ориентирование снимков стереопары это установка их в положение, при котором любая пара соответственных лучей пересекается, то есть обеспечивается построение модели. Величины, определяющие такое положение снимков, называются элементами взаимного ориентирования (ЭвзО).
На практике выполнение условия пересечения соответственных лучей достигается поворотом обоих снимков или поворотами и смещениями только одного из них при неподвижном положении второго. В соответствии с этим различают две системы элементов взаимного ориентирования. В первой неподвижными считают базис фотографирования и главную базисную плоскость левого снимка; во второй – левый снимок.
Первая система элементов. Начало системы координат S1 X1 Y1 Z1 – в центре проекции S1 левого снимка Р1 (рис. 21). Ось X1 совмещена с базисом фотографирования, а ось Z1 установлена в главной базисной плоскости левого снимка. Система координат S2 X2 Y2 Z2 параллельна системе координат S1 X1 Y1 Z1 .
Элементами взаимного ориентирования являются:
![]() - угол в главной базисной плоскости левого снимка между осью Z
1
и главным лучом связки;
- угол в главной базисной плоскости левого снимка между осью Z
1
и главным лучом связки;
![]() - угол на левом снимке между осью y
1
и следом плоскости
- угол на левом снимке между осью y
1
и следом плоскости ![]() ;
;
![]() - угол в главной базисной плоскости левого снимка между осью Z
2
и проекцией главного луча правой связки на главную базисную плоскость левого снимка;
- угол в главной базисной плоскости левого снимка между осью Z
2
и проекцией главного луча правой связки на главную базисную плоскость левого снимка;
![]() - угол между проекцией главного луча правой связки на главную базисную плоскость левого снимка и главным лучом;
- угол между проекцией главного луча правой связки на главную базисную плоскость левого снимка и главным лучом;
![]()
![]() - угол на правом снимке между осью y
2
и следом плоскости
- угол на правом снимке между осью y
2
и следом плоскости ![]() .
.
Вторая система элементов. За начало пространственной фотограмметрической системы координат принимается центр проекции левого снимка S1
. Координатные оси ![]() этой системы направлены параллельно соответствующим координатным осям x1
, y1
левого снимка (рис. 22), а ось
этой системы направлены параллельно соответствующим координатным осям x1
, y1
левого снимка (рис. 22), а ось ![]() совпадает с главным лучом левой связки. Система координат
совпадает с главным лучом левой связки. Система координат ![]() параллельна системе координат
параллельна системе координат ![]() .
.
Элементами взаимного ориентирования являются:
![]() - угол между осью
- угол между осью ![]() и проекцией базиса на плоскость
и проекцией базиса на плоскость ![]() (или элемент ориентирования By
);
(или элемент ориентирования By
);
![]() - угол наклона базиса S1
S2
относительно плоскости
- угол наклона базиса S1
S2
относительно плоскости ![]() (или BZ
);
(или BZ
);
![]() - взаимный продольный угол наклона снимков, составленный осью
- взаимный продольный угол наклона снимков, составленный осью ![]() с проекцией главного луча правой связки на плоскость
с проекцией главного луча правой связки на плоскость ![]() ;
;
![]() - взаимный поперечный угол наклона снимков, заключённый между плоскостью
- взаимный поперечный угол наклона снимков, заключённый между плоскостью ![]() и главным лучом правой связки;
и главным лучом правой связки;
![]() - взаимный угол поворота снимков, угол на правом снимке между осью y2
и следом плоскости
- взаимный угол поворота снимков, угол на правом снимке между осью y2
и следом плоскости ![]()
![]()
Вопросы для самоконтроля
1. Что называется взаимным ориентированием снимков?
2. Чем на практике достигается выполнение условия пересечения соответственных лучей?
3. Сколько систем элементов взаимного ориентирования Вы знаете?
4. Отобразите на рисунке первую систему элементов взаимного ориентирования снимков и поясните чертеж.
5. Отобразите на рисунке вторую систему элементов взаимного ориентирования снимков и поясните чертеж.
Тема 5.4 Фотограмметрическая модель местности
Для достижения основной цели - определения координат точек местности по фотоснимкам, нужно их измерять. Из данных природой человеку органов чувств, особое значение для этого имеет зрение. Обеспечивается оно системой «глаз – мозг». Глаз человека это сложное и совершенное оптическое устройство.
Различают два вида зрения: монокулярное и бинокулярное.
Зрение одним глазом называется монокулярным зрением, двумя - бинокулярным.
Существует понятие стереоскопического (пространственного) восприятия объектов. Оно может быть монокулярным и бинокулярным.
При монокулярном зрении об удалённости наблюдаемых предметов можно судить только по косвенным признакам (относительный размер предметов, свет и тени, перекрытия, перспектива, визуальные контрасты, параллакс движений, детальность изображений и т.д.). Указанные признаки оценки пространственной глубины при монокулярном зрении дают приближённое, а иногда неверное представление о расстояниях.
Стереоскопическое зрение это пространственное восприятие, возникающее при рассматривании объекта двумя глазами. Такое наблюдение называется бинокулярным зрением (рис.23).
Расстояние b между центрами хрусталиков левого и правого глаз это глазной базис. Он у людей разный и колеблется в пределах от 55 до 72 мм.
Угол ![]() F
, под которым пересекаются зрительные оси, называется углом конвергенции (сходимости).
F
, под которым пересекаются зрительные оси, называется углом конвергенции (сходимости).
Неравенство углов ![]() F
и gA
вызывает неравенство дуг
F
и gA
вызывает неравенство дуг ![]() и
и ![]() , полученных в пределах жёлтого пятна левого и правого глаз. Алгебраическая их разность называется физиологическим параллаксом и обозначается р
, т.е.:
, полученных в пределах жёлтого пятна левого и правого глаз. Алгебраическая их разность называется физиологическим параллаксом и обозначается р
, т.е.:
|
|
Пространственное восприятие можно получить не только при непосредственном рассматривании объекта в натуре, но и при рассматривании стереопары снимков этого объекта.
Пространственное восприятие объекта при бинокулярном рассматривании пары снимков, полученных с разных точек пространства, называется стереоскопическим эффектом, а воспринимаемая при этом мнимая картина – стереоскопической моделью.
Для получения стереоэффекта, необходимо, чтобы:
-Разность масштабов снимков стереопары не превышала 16 %.
-Каждым глазом наблюдался только один из снимков.
-Угол, под которым пересекаются соответственные лучи, не превышал 16°.
-Положение снимков было согласовано с глазным базисом. В первом приближении это осуществляется расположением снимков на линии, параллельной глазному базису.
Для обеспечения второго условия получения стереоэффекта используют: анаглифический, поляроидный, затворов, оптический и другие способы.
Вопросы для самоконтроля
1. Какие органы человека обеспечивают определение координат точек местности по снимкам?
2. Какие виды зрения Вы знаете?
3. Как воспринимаются объекты при монокулярном зрении?
4. Проиллюстрируйте стереоскопическое восприятие объектов.
5. Каковы условия получения стереоэффекта?
6. Какие способы получения стереоэффекта Вы знаете?
Раздел 6. Создание и обновление топографических карт по аэрофотоснимкам
Литература: /1/, гл.VI, §§32-34, §§40-42, гл.VII, §§43-44.
Тема 6.1 Стереотопографическая съемка. Технологическая схема
Сущность метода заключается в том, что в камеральных условиях по фотоснимкам получают и контурную часть плана, и изображение рельефа. Полевые работы могут быть необходимы только для определения плановых координат (высот) опознаков и дешифрирования снимков.
Теоретической основой метода является решение двойной обратной пространственной фотограмметрической засечки. Но характер и последовательность выполнения основных процессов зависит в основном от двух факторов: применяемого для обработки снимков оборудования, и необходимости составления фотоплана (ортофотоплана).
Фотопланы (ортофотопланы) как основу топографического плана есть смысл составлять, если снимаемая территория (незастроенная, с рассредоточенной и малоэтажной застройкой) характеризуется большим количеством контуров.
Последовательность выполнения технологических процессов в стереотопографическом методе съемки можно представить так, как это сделано на рис. 24.
К цифровым методам обработки снимков привело бурное развитие вычислительной техники. На первый взгляд цифровые и аналитические методы это одно и тоже. Но это не так. В аналитических методах основным источником информации является фотоснимок, который и измеряется оператором для определения координат и параллаксов. Значит аналитический прибор, как обрабатывающая система обязательно имеет той или иной конструкции стереокомпаратор. Цифровые методы имеют дело с цифровым снимком на каком то носителе, который получают как результат сканирования фотоизображений или путем фотографирования цифровыми камерами.
Часть информации может быть получена в процессе дигитализации существующих картографических материалов. Все это обрабатывается на компьютере. Результат обработки контролируется на экране дисплея, в том числе и в трехмерном виде.
![]()
Вопросы для самоконтроля
1. В чем заключается сущность метода стереотопографической съемки?
2. Что является теоретической основной метода?
3. Когда необходимо составлять фотопланы при стереотопографической съемке?
4. В чем отличие аналитических и цифровых методов?
5. Раскройте основные процессы стереотопографической съемки с использованием аналоговых (аналитических) технологий.
6. Раскройте основные процессы стереотопографической съемки с использованием цифровых технологий.
Тема 6.2 Назначение и классификация универсальных приборов
Эти приборы предназначены для составления планов и карт по паре фотоснимков, а также для сгущения сети съемочного обоснования. Они реализуют решение двойной обратной пространственной фотограмметрической засечки.
Считается, что в процессе развития средств измерения стереопар создано два поколения универсальных аналоговых стереофотограмметрических приборов. При конструировании приборов первого поколения опирались в основном на достижения оптики и механики. Основными их частями являлись моделирующая, измерительная, наблюдательная системы и координатограф.
Появление приборов второго поколения это результат развития вычислительной техники. На направляющие устанавливались регистраторы перемещений, что позволяло автоматизировать процесс передачи результатов измерений в ЭВМ, а значит организовать процесс обработки пары в режиме реального времени (в том числе и процесс построения цифровой модели объекта).
По способу построения пространственной засечки, рассматриваемые приборы можно разделить на оптические, оптико-механические и механические.
По точности аналоговые приборы подразделяются на 3 класса (1,2,3 класса).
Засечка в приборах осуществляется по принципу треугольника, параллелограмма или треугольник плюс параллелограмм. Что это означает, рассмотрено ниже.
Приборы отличаются по способу наблюдения и измерения модели. Основным является оптический способ наблюдения с помощью бинокулярной системы. Для измерения используется мнимая марка. Реже применяются способы анаглифов и поляроидов, а для измерения – действительная марка.
Вопросы для самоконтроля
1. Для чего предназначены универсальные приборы?
2. Как делятся универсальные приборы по способу построения пространственной засечки?
3. Какие бывают универсальные приборы по точности?
4. Как осуществляется засечка в универсальных приборах?
Тема 6.3 Аналоговые, аналитические и цифровые приборы
Оптические универсальные аналоговые стереоприборы. В таких приборах, различного класса точности и разной конструкции, связка лучей восстанавливается, и пространственная модель строится оптическим способом (Рис. 25).
![]()
В нашей стране широкое распространение на производстве получили двойной проектор и мультиплекс. Основными частями проектора являются штанга 1, кронштейны 2, на которых крепятся проектирующие камеры, и планшет, где устанавливается действительная марка с экраном E . Точки S1 и S2 (задние узловые точки объективов камер) являются центрами проекций. Через них проходят проектирующие лучи Aa1 и Aa2 . Камеры можно перемещать вдоль трех взаимно перпендикулярных направляющих, наклонять на углы a , и w и поворачивать в своей плоскости на угол k . Указанные движения обеспечивают построение модели.
Универсальные приборы механического типа. Приборам механического типа конструкторы отдавали предпочтение. В них засечка осуществляется с помощью одной, а иногда двух пар рычагов или линеек. В нашей стране выпускались и были широко распространены на производстве стереопроектор Романовского (СПР), стереограф Дробышева (СД) и его модификация стереограф цниигаик (сц).
Понятие об универсальных стереоприборах аналитического типа. Создание аналитических универсальных стереоприборов связано, прежде всего, с успехами в развитии электронно-вычислительной техники. Это фактически фотограмметрический комплекс, основными частями которого являются: высокоточный прибор для измерения снимков (то есть той или иной конструкции стереокомпаратор), управляющая ПЭВМ, графопостроитель, программное обеспечение и различные сервисные устройства.
Основные процессы при обработке снимков:
- Загрузка исходных данных в ПЭВМ и установка снимков на каретках снимкодержателей;
- Внутреннее ориентирование, которое сводится к выполнению измерений на координатных метках или на крестах, если впечатана сетка. Результат – параметры, позволяющие пересчитывать фиксируемые в процессе измерений отсчеты в фотокоординаты;
- Взаимное ориентированиек снимков. Оно заключается в измерении координат не менее чем на 5 соответственных точках. На самом деле точек берут больше, и их расположение не обязательно должно быть стандартным. Результат – элементы взаимного ориентирования, используемые для вычисления смещений снимков, осуществляемых приводными двигателями. Если ориентирование выполнено корректно, то поперечный параллакс будет отсутствовать при наведении на любую пару соответственных точек (то есть будет построена модель);
- Внешнее ориентирование модели состоит в измерении координат опознаков и вычислении матрицы преобразования. Важной характеристикой качества построенной модели и результатов внешнего ориентирования являются остаточный поперечный параллакс и невязки на опознаках.
- Измерение модели и составление плана начинают после согласования систем координат модели и основы распложенной на столе графопостроителя.
Особенности основных отечественных фотограмметрических станций.
Пакет PHOTMOD.
PHOTMOD это название программного обеспечение для персональных компьютеров по цифровой обработки снимков, которое было разработано, постоянно совершенствуется и внедряется компанией Ракурс (Москва). Компания была основана в 1993 году, и в настоящее время ее продукция успешно эксплуатируется на многих предприятиях России, странах СНГ и дальнего зарубежья.
Последняя версия PHOTMOD 5.0 обеспечивает:
- Обработку снимков центральной проекции и сканерных изображений.
- Выполнение блочной фототриангуляции.
- Создание цифровых моделей рельефа.
- Создание ортофотоплана.
- Векторизацию в стереорежиме и по ортофотоплану.
- Создание и печать электронных карт.
- Калибровку планшетных полиграфических сканеров.
Программный комплекс «Талка» разработан в лаборатории РАН и в настоящее время существует несколько его версий. Он предназначен для создания цифровых фотопланов, ортофотопланов и фотосхем, а также ЦМР и векторных контуров объектов с использованием космических и аэрофотосъемочных материалов. Комплекс обеспечивает:
- Работу в местной системе координат или в проекции Гаусса-Крюгера в соглашениях 1942 года.
- Ввод маршрутной схемы с указанием направления залета, взаимного расположения аэроснимков, приближенного значения продольного и поперечного перекрытия в процентах, координат центров фотографирования
- Ввод стандартной таблицы дисторсии объектива АФА, таблицы крестов или положения координатных меток и других параметров внутреннего ориентирования фотоснимков. Расчет ошибок снимка с учетом всех этих данных и с использованием результатов расчета внутреннего ориентирования во всех дальнейших вычислениях.
- Просмотр фотоснимков с одновременным выводом на экран любого их количества, создание технического проекта, создание репродукции накидного монтажа и увеличение фрагментов фотоснимков.
- Расстановку опорных и контрольных точек с выводом координат планово-высотной подготовки.
- Ручную и автоматическую расстановку определяемых точек по зонам, контрольный пробег по точкам с выводом на экран абрисов точек в заданном увеличении, автоматическую идентификацию точек разных фотоснимков.
- Возможность объявления любых фотоснимков стереопарой.
-Построение стереоконтуров по стереомодели с экспортом в DXF формат в заданной системе координат после проведения блочной фототриангуляции.
- Автоматическое построение ЦМР по стереопаре с учетом введенных оператором стереоточек, проверку и исправление построенной ЦМР.
- Развитие аналитической блочной фототриангуляции с учетом данных взаимного ориентирования каждой стереопары, уравниванием всей модели и с внешним ее ориентированием.
- Создание единой ЦМР в указанной оператором области с взаимной сводкой ЦМР, полученных по стереопарам;
- Построение горизонталей с рисовкой утолщенных горизонталей, разрядкой горизонталей на крутых склонах, построением бергштрихов и надписей в автоматическом режиме.
- Расчет смещения точек фотоснимка из-за влияния рельефа с использованием построенной единой ЦМР, аналитическое трансформирование снимков в цифровом виде с учетом смещения точек из-за влияния рельефа, наклона оптической оси, ошибок снимков, усадки на опорные точки.
-Создание мозаичных ортофотопланов по серии снимков с идеальным совмещением всех трансформационных точек снимков, фотометрическим выравниванием фона изображений, созданием зарамочного оформления по существующим стандартам, рисовкой горизонталей.
- Средства стереонаблюдений – стереоочки типа «3DMAX» или «3DBIS» на станции – в случае обработки снимков с построением ЦМР по стереомодели.
Вопросы для самоконтроля
1. Расскажите об оптических универсальных аналоговых стереоприборах.
2. Что Вы знаете об универсальных приборах механического типа?
3. Расскажите о программном обеспечении PHOTMOD.
4. Программный комплекс «Талка» и задачи, выполняемые с его помощью.
Тема 6.4 Создание топографических карт на стереоприборах. Основные процессы
На разных ЦФС и стереоприборах (АФП) программы обработки снимков варьируются и, соответственно, имеются свои особенности построения и ориентирования модели, съёмки рельефа и контуров. Однако, в целом, работа выполняется одинаково, поэтому можно дать обобщённое описание порядка работы. На рис. 26 приведена технологическая схема из укрупнённых процессов фотограмметрической обработки стереопары.
Процессы: подготовительные работы, внутреннее и взаимное ориентирование снимков, внешнее ориентирование модели, оператор-фотограмметрист должен выполнять как можно быстрее, т.к. чем быстрее эти процессы будут выполнены, тем быстрее можно будет приступить к съёмке рельефа и контуров, и тем выше будет производительность труда.
Подготовительные работы включают получение и изучение исходных материалов, а также подготовку прибора к работе. Исходными материалами являются:
1.материалы наземной, аэро- или космической съёмки.
2.паспортные данные фотокамеры: фокусное расстояние, расстояния между координатными метками или координаты этих меток, данные о дисторсии объектива и другие данные при использовании не кадровых фотокамер;
3.значение высоты фотографирования над средней плоскостью участка местности или значение среднего масштаба снимков;
4.элементы внешнего ориентирования снимков, если они были определены во время съёмки (данные ГЛОНАСС или GPS) или при построении сети фототриангуляции;
5.материалы планово-высотной подготовки снимков.
6.материалы полевого и камерального дешифрирования;
7.редакционные указания и ведомственные материалы картографического назначения;
8.уточнённые фотосхемы или снимки, увеличенные до масштаба составляемой карты с подписанными географическими названиями и характеристиками топографических объектов.
![]()
Съёмку рельефа выполняют только в стереоскопическом режиме. Съёмку контуров выполняют в стереоскопическом режиме или монокулярном по фотоплану. Стереосъёмка контуров выполняется при создании топографических карт на всхолмленные, горные и высокогорные районы, а также на территории с многоэтажной застройкой. Монокулярная съёмка контуров по ортофотоплану используется при создании топографических карт на равнинные и всхолмленные районы, незастроенные территории или с малоэтажной застройкой.
Стереосъёмку рельефа и контуров производят в пределах рабочих площадей стереопар. На их границах производят сводку контуров и горизонталей. Нестыковка контуров не должна быть больше 0,6 мм в масштабе карты, а одноимённых горизонталей - не больше одной трети высоты сечения рельефа. При величине заложения горизонталей менее 2 мм, нестыковка одноимённых горизонталей не должна быть больше 0,7 мм в масштабе карты.
Вопросы для самоконтроля
1. Раскройте технологическую схему фотограмметрической обработки стереопары.
2. Что является исходными материалами при создании карт на приборах?
3. Как выполняют съемку рельефа?
4. Как выполняют съемку контуров?
5. В каких пределах выполняется съемка рельефа и контуров?
6. Где производится сводка контуров и горизонталей?
Тема 6.5 Обновление топографических карт по аэрофотоснимкам
С течением времени природные факторы и деятельность человека изменяют внешний вид участков земной поверхности и они перестают соответствовать содержанию топографических карт, созданных ранее на эти участки. В результате возникает необходимость либо создавать карту заново, либо обновлять существующую. Карту создают заново, если 1) земная поверхность изменила свой внешний вид существенно и на значительной площади, что требует создания новой планово-высотной основы карты; 2) изменились требования к точности карты, и ранее выполненная съёмка им не соответствует.
Однако такие изменения происходят редко. Кроме того, из двух составляющих внешнего вида земной поверхности: ситуации и рельефа, последний на больших площадях не изменяется длительное время, а возникающие из-за природных факторов и деятельности человека изменения носят локальный характер. Что касается ситуации, то её изменения носят динамичный характер. Старение карт на районы интенсивного развития государственного хозяйства происходит значительно быстрее, чем на малообжитые районы. В связи с этим обновление карт на обжитые и промышленно развитые районы выполняется через 6-8 лет, а на остальные районы - через 10-15 лет.
Обновление карт через определённые промежутки времени называется периодическим и является основным. В то же время на районы с интенсивным развитием хозяйства, где изменение ситуации происходит очень быстро, применяется непрерывное обновление карт, для чего ведут дежурную карту масштаба 1:25000 или 1:10000, на которую наносят возникающие изменения и на основе этой карты издают обновлённую.
Обновление топографических карт производят, в основном, по снимкам с использованием компьютерной техники. При обновлении используют три способа: 1) по одиночным снимкам, 2) по новому фотоплану, 3) по модели местности.
1. Обновление карты по снимкам выполняют, если объём исправлений меньше 30-40% контурной нагрузки карты, и применяют для плоскоравннных и равнинных районов.
2.Обновление карты на основе нового фотоплана производят, если объём исправлений превышает 30-40%, и применяют для плоскоравнинных, равнинных и всхолмленных районов.
3. Обновление карты по модели местности выполняют для рельефных, горных районов.
Технологическая схема укрупнённых процессов обновления карт по яимкам приведена на рис. 27.
В подготовительные работы входят: сбор материалов картографического значения, анализ объёма и характера изменений местности, составление рабочего проекта камеральных работ, преобразования топографической карты и снимков в цифровую форму и ввода их в компьютер, построение цифровой мочи рельефа по оцифрованным горизонталям.
В фотограмметрическую обработку снимков входят: фотограмметрическое сгущение опорной сети путём построения сетей фототриангуляции, орто-фототрансформирование снимков с использованием ЦМР и монтирование фотоплана, съёмка контуров по фотоплану (равнинно-всхолмленные районы) или по стереомодели (горных районов).
![]()
После камерального исправления карты производят полевое обследование, в ходе которого уточняют объекты, дешифрированные неуверенно, и производят съёмку объектов, не изобразившихся на снимках или появившихся после проведения аэросъёмки. Кроме того, производят сбор сведений для топографического описания и уточняют названия объектов.
По завершении указанных работ изготавливают издательский оригинал и приступают к обновлению карт всего масштабного ряда вплоть до 1:100000, включительно, что должно быть сделано за период, не превышающий 2-3 года.
Вопросы для самоконтроля
1. По каким причинам необходимо создавать топографическую карту заново?
2. Назовите периодичность обновления карт.
3. С использованием каких средств происходит обновление карт?
4. Назовите способы обновления карт.
5. приведите технологическую схему процессов обновления топографических карт.
6. Что входит в подготовительные работы при обновлении карт?
7. Что включает в себя фотограмметрическая обработка снимков?
Раздел 7. Фототриангуляция
Литература: /1/, гл.XIII, §§106-118.
Тема 7.1 Назначение и классификация пространственной фототриангуляции
Фототриангуляция это камеральное сгущение сети опознаков, полученных в процессе полевых работ. Сущность фототриангуляции в построении по снимкам модели, ее ориентировании и определении координат точек сгущения. Если определяют только плановые координаты точек, то фототриангуляцию называют плоскостной, а если все три координаты – пространственной. В настоящее время на производстве используют в основном пространственную фототриангуляцию. Классифицируют ее также по количеству маршрутов, участвующих в построении модели и применяемым техническим средствам.
Пространственная фототриангуляция может быть одномаршрутной (маршрутной) или многомаршрутной (блочной). Поскольку минимальное число точек, необходимых для внешнего ориентирования модели, не зависит от числа маршрутов, участвующих в ее построении, то особенно выгодна блочная фототриангуляции, так как значительно сокращается объем полевых работ.
В зависимости от применяемых технических средств различают аналитическую, аналоговую и аналого-аналитическую фототриангуляцию. В аналитической пространственной фототриангуляции построение модели и определение координат точек сгущения выполняется на ЭВМ по результатам измерения снимков на стереокомпараторе (аналитическом стереоприборе) или непосредственно на ЭВМ. Этот вариант не накладывает ограничений на формат и элементы ориентирования снимков. Он отличается наивысшей производительностью труда и точностью, так как в процессе машинной обработки результатов измерений учитываются все систематические погрешности, влияние которых можно выразить в математической форме.
Вопросы для самоконтроля
1. Назначение фототриангуляции.
2. В чем состоит сущность фототриангуляции?
3. Классификация фототриангуляции в зависимости от количества маршрутов.
4. Классификация фототриангуляции в зависимости от применяемых технических средств.
Тема 7.2 Аналитическая пространственная фототриангуляция
Технологий выполнения аналитической пространственной фототриангуляции довольно много. Рассмотрим те, что были предложенные в свое время Советскими фотограмметристами и хорошо раскрывают суть дела. Речь идет о способах частично зависимых моделей, независимых моделей и связок.
Сущность способа частично зависимых моделей в том, что вначале строится модель по первой стереопаре. За начало фотограмметрической системы координат принимается центр проекции левого снимка. Его угловые элементы внешнего ориентирования и базис фотографирования устанавливаются произвольно. Затем строится модель по второй стереопаре. Но за угловые элементы внешнего ориентирования ее левого снимка принимаются величины, которые характеризуют его положение относительно фотограмметрической системы координат используемой для построения первой модели. Так поступают с третьей и всеми последующими моделями. Зависимость в результате состоит в том, что оси фотограмметрических координат всех моделей оказываются взаимно параллельными.
Алгоритм решения задачи может быть сконструирован следующим образом. Предположим, что построение любой модели в маршруте осуществляется поворотом, как левого, так и правого снимков. Тогда при решении задачи задействованы следующие величины:
-угловые элементы внешнего ориентирования левого снимка a л w л k л ,, они известны;
-элементы взаимного ориентирования a л и k л , характеризующие поворот левого снимка при построении модели, но с другой стороны, тоже являющиеся угловыми элементами внешнего ориентирования левого снимка, но относительно базисной системы координат. Они вычисляются в процессе взаимного ориентирования.
-элементы взаимного ориентирования a п w п и k п характеризующие поворот правого снимка, но являющиеся и его угловыми элементами внешнего ориентирования в базисной системе координат;
-элементы внешнего ориентирования правого снимка a п w п и k п. относительно той же системы фотограмметрических координат, что и a л w л k л . Их и нужно вычислить, для построения следующей модели.
В способе независимых моделей модели независимы между собой. Для их построения выбирают базисы произвольной длины, измеряют координаты соответственных точек, включенных в сеть, вычисляют элементы взаимного ориентирования в базисной системе координат и трансформируют снимки относительно плоскости, перпендикулярной к главной базисной плоскости левого снимка. В результате координаты точек модели можно вычислять по формулам нормального случая съемки. Как видим, данный вариант не требует вычисления элементов внешнего ориентирования снимков. Для построения общей для всего маршрута модели выполняют операцию внешнего ориентирования второй модели по отношению к первой, третьей по отношению к первым двум и т.д. Затем выполняют внешнее ориентирование общей модели.
В способе связок для каждой точки, включенной в фотограмметрическую сеть, составляются два уравнения коллинеарности, связывающие ее фотокоординаты x и y с пространственными координатами X ,Y ,Z соответствующей точки местности. Каждое из уравнений содержит 6 неизвестных, если они составлены для опознака (неизвестными являются элементы внешнего ориентирования снимка), и 9 неизвестных для точки, пространственные координаты которой подлежат определению. Фотокоординаты точек измеряют на всех снимках маршрута, после чего приступают к вычислению искомых координат, действуя в установленной последовательности.
Этот способ дает возможность при построении сети использовать зафиксированные в полете элементы внешнего ориентирования (GPS определения, показания статоскопа, радиовысотомера и т.д.). Уравнивание, в этом случае, выполняют с учетом весов всех измеренных величин. Следует заметить, что он в настоящее время и наиболее популярен, так как практически нет ограничений на использование памяти ЭВМ, что ранее было серьезной проблемой.
Так же как и в маршрутной в блочной фототриангуляции, также могут использоваться три варианта ее построения.
Наиболее популярный из них является развитием способа связок для маршрутной фототриангуляции. Важно только выбирать связующие точки не только в зоне тройного перекрытия, но и в зоне поперечного перекрытия снимков.
Второй вариант основан на построении независимых моделей соединении их в общую для всего блока модель, для которой затем выполняется операция внешнего ориентирования. То есть это эквивалент способа независимых моделей маршрутной фототриангуляции.
В третьем варианте вначале создаются свободные маршрутные сети. Затем по точкам, расположенным в зоне поперечного перекрытия они соединяются в общую модель для блока, внешнее ориентирование которой осуществляется с помощью опознаков.
Построить идеальную модель по паре снимков нельзя, так как в процессе летносъемочных, геодезических и фотограмметрических работ на положении ее точек влияет большое число различных факторов. Основными причинами, вызывающими деформацию модели, являются:
- Отступление изображений на реальных снимках от центральной проекции;
- Погрешности измерения снимков;
- Методические ошибки, связанные с отступлениями от строгой теории в технологии построения модели.
Вопросы для самоконтроля
1. Какие технологии выполнения фототриангуляции Вам известны?
2. В чем сущность способа частично зависимых моделей?
3. Как работает алгоритм решения задачи в способе частично зависимых моделей?
4. В чем сущность способа независимых моделей?
5. Расскажите о способе связок.
6. Какие варианты используются маршрутной в блочной фототриангуляции?
7. Назовите основные причины, вызывающими деформацию модели.
Тема 7.3 Понятие о цифровой модели местности
Построение ЦМР это очень важный этап работы любой цифровой фотограмметрической системы. Без нее невозможно выполнить трансформирование снимков рельефной местности и ортотрансформирование, автоматизировать процесс нанесение горизонталей и проч. Кроме того, ЦМР представляет и самостоятельный интерес для специалистов различных областей науки и техники.
Строят ее в ручном и автоматическом режиме. В первом случае необходимо набрать высотные пикеты характерных точек рельефа местности и по характерным его линиям. Чем больше таких точек, тем точнее будет ЦМР.
При построении в автоматическом режиме получается, как правило, регулярная ЦМР, являющаяся набором точек в некоторых границах, расположенных по сетке с одинаковым шагом. Значения высот в этих точках определяются с помощью коррелятора (например, модуль DTM программы PHOTOMOD) или методом интерполирования по значениям высот, набранных в процессе векторизации пикетов (Талка).
Алгоритмы построения ЦМР различны, и в модуле DTM (Digital Terrain Model), например, их несколько: регулярная, адаптивная, гладкая и оптимизация. Он строит и визуализирует ЦМР исследуемого объекта в виде пространственной сети триангуляции TIN (Triangulation Irregular Network); Какую из четырех моделей построения ЦМР использовать зависит от характера местности.
Любая программа обеспечивает редактирование ЦМР, построенной в автоматическом режиме, проведение горизонталей с заданным сечением, построение профилей местности, определение объемов и т.д.
Вопросы для самоконтроля
1. Для каких целей необходимо построение ЦМР?
2. В каком режиме возможно построение цифровых моделей рельефа?
3. Как строится ЦМР в программе PHOTOMOD?
4. Какие алгоритмы построения ЦМР предусмотрены в программе PHOTOMOD?
5. Какие операции предусматривает программа PHOTOMOD при работе с ЦМР?
Раздел 8. Создание топографических карт по наземным снимкам
Литература: /1/, гл.XVI, §§126-132, /2/, гл.10.1-10.2.
Тема 8.1 Общая характеристика метода
Наземную стереофототопографическую съёмку применяют в предгорной, горной и высокогорной открытой местности для создания топографических карт и специальных планов в масштабах 1:5000 и крупнее, когда экономически невыгодно проводить аэросъёмку и наземные методы съёмки. Её можно также применять в отдалённых, малообжитых всхолмленных районах с коротким полевым сезоном, т.к. её объём полевых работ намного меньше, чем у других видов наземных съёмок. Данный вид съёмки можно использовать для создания планов населённых пунктов, расположенных в долинах, котловинах между возвышенностями, с которых можно произвести стереофотосъёмку. Наземную стереофототопографическую съёмку можно проводить в сочетании е аэросъёмкой для создания топографических карт в масштабах 1:10000 и мельче. В этом случае по наземным снимкам можно выполнить привязку аэроснимков. Кроме того, при аэросъёмке глубокие ущелья могут стереоскопически не просматриваться, т.к. контура, расположенные в ущелье, могут изобразиться только на одном аэроснимке. Также часть территории может быть закрыта небольшим облаком. Такие «мертвые зоны» доснимают наземной стереофотосъёмкой. Однако нужно отметить, что при наземной стереофотосъёмке процент наличия «мертвых зон» выше из-за того, что возвышенность или выступ на склоне могу т закрыть территории, расположенные за ними, и приходится проводить дополнительные фотосъёмочные и геодезические работы.
При выполнении стереофототопографической съёмки используют фотокамеры, в конструкцию которых входит угломерное устройство, называемое ориентирующим устройством. Оно обеспечивает установку главной оптической оси фотокамеры в заданном направлении относительно базиса фотографирования. Фотосъёмка ведется, в основном, на фотопластинки, хотя имеются фотокамер, у которых предусмотрена съёмка и на фотопластинки, и на фотоплёнки. Не у каждой фотокамеры имеется затвор, т.к. при фотографировании неподвижных объектов он необязателен. Формат кадра, в основном, прямоугольный. Длинная сторона кадра ориентируется в горизонтальном направлении. В нашей стране, в основном, использовались фотокамеры фирмы К.Цейсс: Photheo 19/1318, UMK и SMK. Фототеодолитный комплект Photheo 19/1318 был создан для использования при топографической съёмке и состоит из фотокамеры, теодолита, базисной рейки, трёх штативов. Универсальная фотограмметрическая камера UMK была создана для выполнения фотосъёмок, в основном, прикладного характера. Стереофотограмметрическая камера SMK предназначена для фотосъёмки с близких расстояний и динамических процессов. Она состоит из двух фотокамер, жестко укреплённых на штанге. Штанга с фотокамерами крепится на вертикальной стойке, позволяющей с помощью ручки менять высоту фотокамер.
В настоящее время нес большее распространение получают цифровые фотокамеры, а также лазерные сканирующие съёмомиые системы. Последние позволяют получить не только изображение объекта, но и координат ею точек в заданной системе координат, что ускоряет процесс фотограмметрической обработки снимков.
Вопросы для самоконтроля
1. Где применяют наземную стереофототопографическую съёмку?
2. В сочетании с чем можно проводить наземную стереофототопографическую съёмку и для каких целей?
3. Каким образом используется наземная и аэрофотосъемка при взаимном выполнении.
4. Какие технические средства Вы знаете для выполнения наземной стереофототопографической съёмки?
5. Какие технические средства для выполнения наземной стереофототопографической съёмки получают наибольшее распространение в настоящее время?
Тема 8.2 Создание топографических карт по наземным фотоснимкам
Наземная стереофототопографическая съёмка какого-либо объекта выполняется с одной или нескольких фотостанций, состоящих из двух или трёх точек фотографирования. На этих точках устанавливают штативы, в трегеры которых по очереди вставляют фотокамеру, теодолит, дальномерную рейку или марку. Весь объём работ при наземной стереофототопографической съёмки делится на две части: полевую и камеральную.
В полевые работы при наземной стереофототопографической съёмке входят: рекогносцировка местности, геодезические измерения. фотографирование. фотолабораторные работы, дешифрирование. В ходе рекогносцировки местности уточняют границы съёмочного участка, устанавливают расположение пунктов геодезической сети, выбирают места расположения фотостанций, опорных и контрольных точек, намечают способы привязки станций к геодезической сети и определения координат опорных и контрольных точек. При выборе мест расположения фотостанций исходят из условия, что фотографирование всего участка должно быть произведено с наименьшего их числа. При этом число «мертвых» пространств на стереоскопическом изображении должно быть сведено к минимуму, чтобы сократить затраты на их досъёмку.
Наметив положение фотостанции и определив расстояние до ближней и дальней границы съёмочного участка, рассчитывают длину базиса фотографирования. Расчёт выполняют с учётом точности создаваемой карты. При определении по наземным снимкам трёх координат точек местности с наименьшей точностью получают отстояния, которые обозначаются координатой Y. Для повышения точности их определения нужно увеличить базис фотографирования. Его минимально допустимую длину рассчитывают но формуле

где т Y - точность определения отстояний точек, которая зависит от точности создаваемой карты, nip - точность измерения продольного параллакса.
Максимальное значение базиса фотографирования зависит от минимального отстояния Ymin точек и длины lХ стороны кадра вдоль базиса фотографирования. Следовательно, при выборе фотостанции точки фотографирования нужно располагать на расстоянии В. значение которою не должно выходить за пределы: Bmn В Вm ах . Выбранные на местности точки фотографирования закрепляют.
После выбора положения фотостанции устанавливают границы рабочих площадей каждой стереопары, которые будут получены на этой фотостанции, и в пределах этих площадей намечают контрольные точки. Если нужно, их маркируют. В ходе выполнения на фотостанции геодезических работ измеряют геодезические координаты точек фотографирования и контрольных точек, длину базиса фотографирования. Длину базиса фотографирования измеряют как неприступное расстояние параллактическим методом с помощью теодолита и дальномерной базисной рейки. Координаты точек фотографирования определяют с помощью обратных засечек, прокладкой ходов полигонометрии и тригонометрического нивелирования. Координаты контрольных точек определяют прямыми засечками. В связи с развитием спутниковых навигационных систем их стали использовать для привязки фотостанции. Средние ошибки положения точек фотографирования, опорных и контрольных точек не должны превышать 0,2 мм в масштабе создаваемой карты, а по высоте 0,2 от высоты сечения рельефа, выбранной для создаваемой карты.
Фотографирование местности производят во время её наилучшей освещённости. Фотокамеру устанавливают на точку фотографирования, по уровням приводят вертикальную ось вращения в отвесное положение, с помощью ориентирующего устройства главную оптическую ось разворачивают в заданном направлении. Фотосъёмку с обоих концов базиса проводят в минимально короткий промежуток времени, чтобы оба снимка стереопары были получены при одинаковых условиях освещённости. Экспонированные фотопластинки проявляют на фотостанции, чтобы избежать возможного брака при определении выдержки или по другим причинам. С полученных негативов изготавливают контактные отпечатки, на которых отмечают контрольные точки и наносят результаты полевого топографического дешифрирования.
Полученные на станции снимки обладают перед аэроснимками тем преимуществом, что их элементы внешнего ориентирования определяются геодезическими измерениями с большой точностью, и, следовательно, их обработка проходит гораздо быстрее и проще, чем обработка аэроснимков. При выполнении камеральной обработки наземных снимков на стереофотограмметрических приборах собирают цифровую и графическую информацию об объекте так же, как это делается по аэроснимкам.
Вопросы для самоконтроля
1. Как выполняется наземная стереофототопографическая съёмка?
2. Что входит в полевые работы при наземной стереофототопографической съёмке?
3. Как рассчитывают длину базиса фотографирования при наземной стереофототопографической съёмке?
4. Как устанавливают границы рабочих площадей каждой стереопары?
5. Каковы средние ошибки положения точек фотографирования, опорных и контрольных точек?
6. Как производят фотографирование местности?
7. На каких приборах производят обработку наземной стереофототопографической съёмки?
Раздел 9. Понятие о космической съемке
Литература: /1/, гл.XVI, §§126-132, /2/, гл.11.1-11.7.
Тема 9.1 Общие сведения о космической съемке
Если грамотное выполнение аэро- и наземной съёмки обеспечивают успешное выполнение фотограмметрической обработки снимков, то объём картографической информации о поверхности планеты, получаемой по космическим снимкам, и методика фотограмметрической обработки этих снимков определяются условиями проведения съёмочного сеанса. Среди этих условий основными являются:
- вид траектории, по которой перемещался носитель съёмочной системы,
- ориентация оптической оси съёмочной системы в пространстве,
- принцип построения изображения, положенный в основу работы съёмочной системы.
Космическая съёмка производится с гораздо больших высот, чем аэросъёмка. Высоты фотографирования равны сотням и тысячам километров, поэтому по сравнению с аэроснимками космические снимки имеют более мелкий масштаб. Для того чтобы укрупнить масштаб снимков, приходится увеличивать фокусное расстояние фотокамеры, т.е. брать более длиннофокусные фотокамеры, чем используются при топографической аэросъёмке. Кроме того, высоты фотографирования во время съёмочного сеанса изменяются в больших пределах как за счёт взаимного расположения траектории и небесного тела, так и за счёт кривизны траектории и сферичности поверхности небесного тела, а это приводит к значительной разномасштабности снимков.
В связи с изменением высот фотографирования в больших пределах возрастают требования к выдерживанию продольного перекрытия снимков. При съёмке с постоянным интервалом фотографирования процент продольного перекрытия на больших высотах фотографирования будет близок к максимальному значению и начнет уменьшаться по мере приближения носителя фотокамеры к планете, достигнув наименьшего значения на минимальной высоте, а затем с удалением носителя от планеты снова будет увеличиваться.
Еще одна особенность космической съёмки состоит в том, что нужно учитывать изменение освещённости по трассе полёта из-за изменения высоты Солнца над горизонтом, В связи с этим съёмочная система должна иметь автомат регулирования экспозиции.
Т.к. фотокамера установлена в герметичном отсеке носителя, где поддерживаются заданные температура и давление, на геометрию построения изображения оказывают влияние иллюминатор, через который производится фотографирование, и внутренняя фотограмметрическая рефракция, возникающая из-за прохождения оптическими лучами резко различных сред по обе стороны иллюминатора. В то же время при фотографировании планет, не имеющих атмосферы, отсутствует влияние атмосферной рефракции.
При планировании каждого космического полёта выбирают оптимальную траекторию, которая позволила бы при пролёте небесного тела, его облёте или выходе на орбиту его спутника получить максимальную информацию при решении разнообразных научно-технических задач. Движение космического аппарата при условии, что на него действует притяжение только одного небесного тела, происходит по так называемым кеплеровским орбитам, соответствующим математическим линиям: прямой, окружности, эллипсу, параболе, гиперболе.
В течение сеанса космической съёмки применяют два варианта расположения оптической оси съёмочной системы в пространстве. Эти варианты соответствуют двум известным случаям съёмки: параллельному и конвергентному, но при космической съёмке частным случаем последнего является отслеживание оптической осью съёмочной системы местной вертикали на поверхности планеты.
После выбора оптимальной траектории полёта космического носителя съёмочной системы на ней намечают в зависимости от задач, которые должны решаться по космическим снимкам, отдельные участки, где предполагается проведение съёмочных сеансов. Возможны следующие варианты выбора таких участков на траектории полёта при съёмке планеты: 1) при подлёте к ней или отлёте от неё; 2) в районе прохождения станцией перицентра траектории; 3) на различных участках орбиты искусственного спутника планеты. Если программой полёта предусмотрена посадка космического аппарата на поверхность планеты, то съёмка производится по аналогии с наземной фотосъёмкой, и полученные снимки используют для создания крупномасштабных карт и планов на небольшие участки.
Использование космических снимков для создания карт в масштабах мельче 1:100000 даёт возможность отказаться от технологии составления от крупного масштаба к мелкому. Т.к. на космических снимках имеет место естественная генерализация контуров, сокращается влияние субъективных факторов при генерализации изображения на создаваемой карте. В результате общегеографические и тематические карты создаются быстрее, и их качество повышается, т.к. картограф-составитель, меньше занимаясь вопросами, касающимися генерализации, больше уделяет внимания вопросам содержания карты.
Космические снимки охватывают большие площади планеты, в пределах которых сферическую поверхность планеты нельзя аппроксимировать плоскостью. Её разворот на плоскость осуществляется по формулам математической картографии.
Например, для топографических карт в нашей стране используется проекция Гаусса-Крюгера, в которой при фотограмметрической обработке аэроснимков задают координаты опорных точек, и на этапе внешнего ориентирования проблем не возникает. Но система координат проекции Гаусса-Крюгера привязана к узкой полосе шириной в 6°. Следовательно, таких систем координат на поверхности Земли будет 60, и в пределах стереопары космических снимков или одного снимка будет не одна такая система координат. При фотограмметрической обработке на этапе внешнего ориентирования снимков система координат планеты должна быть одна. В качестве такой системы координат нужно взять планетоцентрическую систему координат, которая является единой для всей поверхности планеты и исходной при расчёте картографической проекции.
Таким образом, обработка космических снимков должна быть произведена с учётом фотограмметрических преобразований и формул выбранной картографической проекции. В этом случае влияние сферичности планеты будет находиться в пределах, устанавливаемых для данной проекции и масштаба карты.
При космической съёмке используются панорамные фотокамеры, которые позволяют за один орбитальный пролёт сфотографировать с учётом возможностей съёмочной системы практически всю освещённую поверхность планеты от горизонта до горизонта поперёк маршрута и от утреннего до вечернего терминатора вдоль маршрута. Панорамные фотокамеры относятся к сканерным съёмочным системам, выполняющим регистрацию изображения построчно.
Особенностью радиолокационной съёмки является то, что её можно проводить независимо от времени суток, погодных условий, наличия облачного покрова. Сдерживающими факторами широкого применения этой съёмки для целей картографирования поверхностей планет была низкая разрешающая способность по сравнению с фотосъёмкой и сложность обработки полученных радиолокационных изображений. Однако эти недостатки устраняются совершенствованием радиолокационной техники, записью изображений в цифровом форме, электронно-оптическими методами преобразования изображений, компьютерными методами обработки получаемой информации.
Вопросы для самоконтроля
1. Назовите условия проведения съёмочного сеанса.
2. Что необходимо выполнить для укрупнения масштаба снимков?
3. Как изменяются требования к выдерживанию продольного перекрытия снимков в связи с изменением высот фотографирования?
4. Почему необходимо учитывать изменение освещённости по трассе полёта?
5. Назовите виды кеплеровских орбит при движении космического аппарата.
6. Назовите варианты выбора оптимальной траектории полёта космического носителя съёмочной системы.
7. Назовите особенности фотограмметрической обработки космических снимков.
8. Какова особенность радиолокационной съёмки?
Раздел 10. Автоматизация фотограмметрических работ
Литература: /1/, гл.XVII, §§134.
Тема 10.1 Автоматизация основных процессов создания карт
Уже в семидесятых годах двадцатого столетия стало очевидным, что от графических продуктов (планов и карт), которые получают в процессе съемок нужно переходить к их цифровым аналогам. Связано это было с бурным развитием вычислительной техники, увеличением ее мощности и быстродействия. В результате появилась реальная возможность заменить в качестве носителей информации картографические материалы на цифровые модели объектов. На основе таких моделей автоматизация решения различных прикладных задач, в том числе и проектирования, а также составления необходимых графических документов становилась делом техники.
Получить цифровые модели можно, например, путем цифрования карт и планов. Но гораздо производительнее совместить их построение с процессом съемки (с процессами выполнения линейно-угловых измерений в тахеометрии или обработки снимков в фотограмметрии). В тахеометрической съемке это привело к появлению полевых регистраторов информации, а затем и электронных тахеометров, исключивших ручной ввод данных из журналов в компьютер. В фотограмметрии было создано второе поколение универсальных аналоговых стереофотограмметрических приборов. Они были обеспечены аналого-цифровыми преобразователями, пакетами прикладных программ, обеспечившими автоматизацию процессов внешнего ориентирования модели, построенной на приборе, регистрацию результатов измерения снимков и построения цифровых моделей. Иногда такое сочетание аналоговых приборов со средствами автоматизации называют гибридными системами.
Когда речь идет об автоматизации обработки снимков, то предполагается, что автоматизированными должны быть следующие процессы решения двойной обратной пространственной засеки:
1. Внутреннее ориентирование снимков;
2. Построение фотограмметрической модели (взаимное ориентирование снимков);
3. Внешнее ориентирование модели по опознакам;
4. Съемка ситуации и рельефа.
При этом на всех этапах должна быть обеспечена автоматическая регистрация измерений снимков и программная поддержка построения цифровой модели на ПЭВМ. Для реализации процесса автоматизированной обработки необходимы аппаратные и программные средства.
Что касается программного обеспечения, то в нашей стране разработано несколько пакетов, обеспечивающих и решение двойной обратной пространственной засечки, и построение цифровой модели объекта, при чем как по результатам аэрофотосъемки, так и по результатам наземной стереофотограмметрической съемки.
В целом автоматизированная обработка снимков при наземной стереофотограмметрической съемке включает в себя следующие этапы:
1. Подготовительные работы;
2. Корректирование фотограмметрической модели;
3. Геодезическое ориентирование фотограмметрической модели (ее внешнее ориентирование);
4. Сгущение съемочного обоснования и фотограмметрическую съемку объекта.
Вопросы для самоконтроля
1. По каким причинам в настоящее время осуществляется повсеместный переход с аналоговых на цифровые технологии?
2. Какими способами можно получать цифровые модели местности?
3. Каковы основные процессы автоматизации обработки снимков?
4. Что необходимо для реализации процесса автоматизированной обработки снимков?
5. Что в себя включает автоматизированная обработка снимков при наземной стереофотограмметрической съемке?
3. ЗАДАНИЯ ДЛЯ КОНТРОЛЬНЫХ РАБОТ
Вариант №1
1. Аэрофотосъемочные самолеты
2. Цель, принцип и способы трансформирования
3. Организация камерального дешифрирования снимков
4. Механизм корреляции изображений
5. Назначение, цель и сущность фототриангуляции.
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №2
1. Устройство АФА
2. Искажения на аэрофотоснимке
3. Топографическое дешифрирование снимков
4. Стереотопографическая съемка. Технологическая схема
5. Создание топографических карт по наземным снимкам
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №3
1. Виды АФА, их предназначение
2. Элементы и свойства центральной проекции
3. Технические средства для трансформирования
4. Дешифровочные признаки, краткая характеристика
5. Особенности фотограмметрической обработки космических снимков
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №4
1. Космические носители аппаратуры дистанционного изучения земной поверхности
2. Центральная и ортогональная проекция
3. Создание фотоплана и фотосхемы
4. Монокулярное и бинокулярное зрение
5. Аналитическая пространственная фототриангуляция
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №5
1. Объектив АФА и его основные характеристики
2. Элементы ориентирования снимка
3. Приборы для дешифрирования изображений
4. Элементы стереопары снимков
5. Особенности космической съемки
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №6
1. Принцип получения цифровых снимков
2. Трансформирование аэрофотоснимков
3. Технические средства для дешифрирования космических снимков
4. Стереоскопический эффект, стереоскопическая модель
5. Автоматизация основных процессов создания карт и планов
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №7
1. Назначение и классификация АФА
2. Оборудование для фотографирования с Земли
3. Системы координат точек местности и снимка
4. Особенности цифрового трансформирования и составления фотоплана
5. Алгоритмы построения ЦМР
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №8
1. Получение снимков местности
2. Ортофототрансформирование
3. Виды и методы дешифрирования, их основные достоинства и недостатки
4. Элементы взаимного ориентирования стереопары
5. Области применения наземной стереофототопографической съемки
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №9
1. Вспомогательное аэрофотосъёмочное оборудование
2. Создание цифровых фотопланов
3. Стереопара аэрофотоснимков и стереомодель
4. Способы получения стереоэффекта
5. Назначение цифровых моделей рельефа и область их применения
6. Решить задачи №№ 1-4 (см. приложение)
Вариант №10
1. Масштаб снимка
2. Координаты и параллаксы точек стереопары
3. Особенности измерения цифровых снимков
4. Обновление топографических карт по аэрофотоснимкам
5. Применение цифровых фотокамер и лазерных сканирующих съемочных систем при наземной съемке
6. Решить задачи №№ 1-4 (см. приложение)
ПРИЛОЖЕНИЕ
Задача 1
Для расчета плановой аэрофотосъемки необходимо вычислить:
Н – высоту фотографирования;
В – базис фотографирования;
DY – расстояние между маршрутами на местности;
L – число аэрофотоснимков в одном маршруте;
К – число маршрутов;
N – число аэрофотоснимков на участке.
Для вычисления даны следующие исходные данные.
Таблица 1
| № варианта |
Длина участка С (км) |
Ширина участка D (км) |
Масштаб залета 1:m |
fk (мм) |
p*q (%) |
lx *ly (см) |
| 1 |
25 |
20 |
1:9000 |
200 |
64*36 |
18*18 |
| 2 |
28 |
17 |
1:12000 |
70 |
62*34 |
18*18 |
| 3 |
17 |
12 |
1:14000 |
100 |
63*32 |
18*18 |
| 4 |
32 |
24 |
1:17000 |
200 |
61*33 |
18*18 |
| 5 |
28 |
16 |
1:24000 |
100 |
60*32 |
18*18 |
| 6 |
43 |
26 |
1:27000 |
200 |
61*36 |
18*18 |
| 7 |
85 |
42 |
1:28000 |
70 |
62*32 |
18*18 |
| 8 |
47 |
34 |
1:35000 |
100 |
61*33 |
18*18 |
| 9 |
55 |
30 |
1:41000 |
140 |
60*30 |
18*18 |
| 10 |
65 |
42 |
1:48000 |
70 |
64*33 |
18*18 |
Указания к решению задачи
Для расчета плановой аэрофотосъемки необходимо использовать формулы из /1/ (гл.XIV, §121). К задаче выполнить схему участка аэрофотосъемки.
Задача 2
Вычислить средний масштаб планового аэрофотоснимка, если на аэрофотоснимке измерены соответствующие отрезки. Масштаб карты равен 1:m = 1:10 000.
Таблица 2
| № варианта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
| l1 (см) |
17.8 |
14.1 |
18.8 |
11.2 |
16.0 |
15.2 |
19.6 |
10.1 |
17.0 |
19.0 |
| L1 (см) |
25.0 |
19.6 |
27.0 |
16.6 |
22.4 |
21.8 |
27.5 |
14.5 |
23.8 |
26.6 |
| l2 (см) |
20.0 |
17.6 |
15.2 |
13.7 |
12.7 |
12.3 |
20.5 |
17.3 |
14.8 |
16.2 |
| L2 (см) |
28.0 |
24.6 |
21.8 |
20.2 |
17.9 |
17.7 |
28.7 |
25.0 |
20.7 |
22.8 |
Условные обозначения: l – на аэрофотоснимке; L – на карте.
Указания к решению задачи
Для вычисления масштаба аэрофотоснимка необходимо использовать формулу:
m*l=M*L,
где m – знаменатель масштаба аэрофотоснимка;
M – знаменатель масштаба карты.
Задача 3
Вычислить линейное смещение точки на аэрофотоснимке, вызванное рельефом местности.
Таблица 3
| № варианта |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
| r (мм) |
65 |
70 |
60 |
90 |
80 |
75 |
73 |
68 |
72 |
84 |
| h (м) |
92 |
-40 |
30 |
35 |
-55 |
88 |
95 |
-100 |
112 |
-130 |
| H (м) |
2100 |
1950 |
1820 |
2000 |
1890 |
1500 |
1760 |
1830 |
2300 |
1720 |
Задача 4
Вычислить отметку точки А2 , если известна отметка точки А1 , высота фотографирования над уровнем моря, базис фотографирования в масштабе аэрофотосъемки и продольные параллаксы точек 1 и 2.
Таблица 4
| № варианта |
А1 (м) |
Набс (м) |
В (мм) |
р1 (мм) |
р2 (мм) |
| 1 |
180.9 |
1750 |
67.4 |
68.47 |
67.09 |
| 2 |
366.6 |
1480 |
62.6 |
61.89 |
62.42 |
| 3 |
293.4 |
1350 |
73.9 |
74.92 |
73.94 |
| 4 |
278.0 |
2290 |
72.6 |
72.21 |
72.56 |
| 5 |
256.5 |
1620 |
58.3 |
61.19 |
58.70 |
| 6 |
212.4 |
1400 |
63.4 |
60.88 |
63.15 |
| 7 |
374.6 |
2100 |
53.0 |
54.58 |
53.98 |
| 8 |
269.9 |
1710 |
56.9 |
55.19 |
56.72 |
| 9 |
349.8 |
2210 |
55.0 |
57.16 |
55.34 |
| 10 |
296.6 |
2340 |
53.8 |
52.56 |
53.16 |
Указания к решению задачи
При решении задачи следует иметь ввиду, что Н – высота фотографирования над начальной точкой Н= Набс - Аi , где Набс – высота фотографирования над уровнем моря. Для вычисления отметки точки необходимо использовать формулы из /1/ (гл.VIII, §48).
4. ПЕРЕЧЕНЬ РЕКОМЕНДУЕМОЙ ЛИТЕРАТУРЫ ДЛЯ ИЗУЧЕНИЯ
1. Краснощекова И.А., Нормандская О.Б., Кислова A.M., Кислов В.В. Фотограмметрия. - М.: Недра, 1978.
2. Краснопевцев Б.В. Фотограмметрия. – М., МИИГАИК, 2008.
3. Михайлов А.П. «Курс лекций по фотограмметрии». – М., МИИГАИК.
4. Инструкция по фотограмметрическим работам при создании цифровых топографических карт и планов. – М.: ЦНИИГАиК, 2002.
5. Лобанов А.Н., Буров М.И., Краснопевцев Б.В. Фотограмметрия. - М.: Недра, 1987.
6. Фельдман М.И., Фостиков А.А. Фотограмметрия. - М., Недра, 1993.
7. Аковецкий В.И. Дешифрирование снимков. - М.: Недра, 1983.
8. Фельдман М.И., Макаренко К.И., Денисюк Б.Д. Лабораторный практикум по фотограмметрии и стереофотограмметрии. - М.: Недра, 1989.
9. Буров М.И., Краснопевцев Б.В., Михайлов А.П. Практикум по фотограмметрии. - М.: Недра, 1987.
10.Обиралов А.И. и др. Практикум по фотограмметрии и дешифрированию снимков. - М.: Недра, 1990.
11.Инструкция по фотограмметрическим работам при создании топографических карт и планов. - М.: Недра, 1974.
12.Основные положения по аэрофотосъемке, выполняемой для создания топографических карт и планов. - М.: Недра, 1982.
13.Сердюков В.М. Фотограмметрия. - М.: Высшая школа, 1983.
14.Руководство по дешифрированию снимков при топографической съемке и обновление карт, масштабов 1 : 2 000 и 1 : 5 000. - М.: ЦНИИГАиК, 1980.
15.Инструкция по дешифрированию аэрофотоснимков и фотопланов в масштабах 1:10 000 и 1 : 25 000 для целей землеустройства, государственного учета и земельного кадастра. - М.: ВИСХАГИ, 1978.
16.Инструкция по топографической съемке в масштабах 1:5 000 - 1:500. - М.: Недра, 1985.
17.Инструкция по топографической съемке в масштабах 1:10000 - 1:25000.— М.: Недра, 1982.
18.Руководство по обновлению топографических карт. - М.: Недра, 1978.
СОДЕРЖАНИЕ
1. Введение……………………………………………………………………3
2. Примерная программа учебной дисциплины……………………………5
3. Задания для контрольных работ………………………………………....90
4. Перечень рекомендуемой литературы для изучения……………..……95![]()