Методические указания и контрольные задания для студентов-заочников Салаватского индустриального колледжа по специальности 140613 «Техническая эксплуатация и обслуживание электрического и электромехан
СОДЕРЖАНИЕ: Методические указания и контрольные задания для студентов-заочников Салаватского индустриального колледжаСалаватский индустриальный колледж
Системы автоматизированного управления
электроприводами
Методические указания и контрольные задания для студентов-заочников Салаватского индустриального колледжа
по специальности 140613
«Техническая эксплуатация и обслуживание электрического
и электромеханического оборудования»
2006
|
| Составитель: |
|
| преподаватель Салаватского индустриального колледжа |
_________ Ф.А.Кобякова |
| Рецензент |
|
| преподаватель Салаватского индустриального колледжа |
_________ М.Е.Колеганов |
| Ответственный за выпуск |
_________ А.Б.Денисов |
Содержание
| 1 Введение |
4 |
| 2 Программа учебной дисциплины |
5 |
| 3 Перечень практических и лабораторных работ |
28 |
| 4 Задания для контрольных работ |
28 |
| 5 Литература |
33 |
Введение
Дисциплина «Системы автоматизированного управления электроприводами» продолжает знакомить студентов с принципами построения автоматизированного электропривода, основы которых рассматривались при изучении дисциплины «Электрический привод». В дисциплине «Системы автоматизированного управления электроприводами» рассматриваются основные типы преобразователей, применяемые в настоящее время в регулируемом электроприводе постоянного и переменного токов, в первую очередь это тиристорные преобразователи. Они представляют собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схеме. Определенные перспективы развития этого вида электропривода связаны и с использованием транзисторных преобразователей. В настоящее время силовые транзисторы выпускаются на напряжение до 1500 В и токи до 40 А, что делает возможным создание электроприводов мощностью до нескольких десятков киловатт. Вместе с тем их стоимость по сравнению со стоимостью тиристоров заметно выше, а выпуск ограничен, что препятствует их широкому использованию в автоматизированном электроприводе.
Дисциплина «Системы автоматизированного управления электроприводами» является дисциплиной по выбору студентов, устанавливаемой учебным заведением и базируется на знаниях, полученных студентами при изучении дисциплин “Электронная техника” и “Электрический привод”.
В результате изучения дисциплины студенты должны:
иметь представление:
- о системах управления электроприводами;
- о комплектных тиристорных электроприводах;
- об аппаратуре цепей регулирования, защиты и сигнализации автоматизированного электропривода;
знать:
- условные графические обозначения полупроводниковых приборов ;
- схемы и принцип работы вентильных преобразователей;
- назначение, характеристики, схемы и принцип работы СИФУ;
- схемы и принцип работы реверсивных вентильных преобразователей напряжения;
- схемы и принцип работы широтно-импульсных преобразователей постоянного тока;
- схемы и принцип работы преобразователей частоты для управления асинхронных двигателей;
- сущность, преимущества и недостатки системы подчиненного регулирования параметров электропривода;
- назначение и принцип работы автоматического регулирования возбуждения синхронных двигателей.
уметь:
- работать со справочной литературой;
- осуществлять выбор трансформатора для тиристорного электропривода;
- осуществлять выбор сглаживающего дросселя.
Рабочая программа рассчитана на 96 часов (из них 20 ч. лабораторных и практических занятий ).
Методические указания
При изучении учебной дисциплины необходимо постоянно обращать внимание на ее прикладной характер.
Освоение учебной дисциплины предполагает практическое осмысление ее разделов и тем на лабораторных и практических занятиях, в процессе которых студенты должны закрепить и углубить теоретические знания, приобрести необходимые умения.
В содержании учебной дисциплины по каждой теме приведены требования к формируемым представлениям, знаниям и умениям.
При изучении материала необходимо соблюдать единство терминологии и обозначений в соответствии с действующими стандартами.
Вначале необходимо проработать материал по разделам тематического плана и только после его усвоения следует перейти к расчетной и теоретической частям контрольной работы.
Изучение материала следует вести по приведенной литературе, тщательно конспектируя прорабатываемый материал.
Помните, что наличие хорошего конспекта со ссылками на литературу поможет успешно выполнить контрольную работу и сдать экзамен.
Изображение схем в конспекте облегчает их понимание и способствует запоминанию отдельных типовых узлов, которые часто повторяются во многих схемах. Приучайтесь, читая схему, выделять в ней функциональные узлы, т.е. такие кусочки схемы, которые состоят из нескольких элементов, повторяются в различных схемах, но служат одним и тем же целям.
Для успешного освоения учебного материала в процессе конспектирования пользуйтесь прилагаемым перечнем вопросов. При ответе на них легче усвоите математические выводы, формулы и схемы. Помните, что вопросы для самоконтроля не исключают необходимости тщательного анализа всего материала. Расчетные навыки получите при выполнении контрольной работы.
При выполнении контрольной работы необходимо помнить, что все расчеты должны быть подробными, четко выполненными с соответствующими пояснениями. В расчетах должны использоваться единицы физических величин международной системы СИ.
Результаты расчетов следует анализировать с точки зрения реальности и соответствия их данной задаче.
Все ответы на вопросы должны быть краткими, четкими и в то же время исчерпывающими.
Все схемы должны выполняться карандашом по линейке с соблюдением всех условных обозначений согласно действующим ГОСТам (ГОСТ 2.105 и последующие).
Учебным планом предусмотрена сдача экзамена.
2 Программа учебной дисциплины
Тематический план
|
Наименование разделов и тем |
Максимальная учебная нагрузка в часах |
Количество аудиторных часов при очной форме обучения |
Самостоятельная работа студента |
||
|
Всего
|
Лабораторные |
Практические
|
|||
| 1 |
2 |
3 |
4 |
5 |
6 |
| Раздел 1 Преобразователи электрической энергии |
34 |
30 |
4 |
4 |
|
| Тема 1.1 Управляемые выпрямители. Динамические свойства вентильного преобразователя. |
4 |
4 |
|||
| Тема 1.2 Системы импульсно - фазового управления тиристорами |
4 |
4 |
|||
| 1 |
2 |
3 |
4 |
5 |
6 |
| Тема1.3 Реверсивные вентильные преобразователи напряжения |
4 |
4 |
|||
| Тема 1.4 Широтно-импульсные преобразователи постоянного тока |
4 |
4 |
|||
| Тема 1.5 Преобразователи частоты для управления асинхронными двигателями. Принцип работы автономного инвертора |
4 |
4 |
2 |
||
| Тема 1.6 Инверторы напряжения и инверторы тока |
4 |
4 |
|||
| Тема 1.7 Преобразователи частоты с непосредственной связью |
10 |
6 |
2 |
4 |
|
| Раздел 2 Принципы управления электроприводами |
12 |
12 |
4 |
||
| Тема 2.1 Принципы автоматического управления скоростью и моментом резисторных электроприводов |
4 |
4 |
2 |
||
| Тема 2.2 Принципы автоматического управления скоростью и моментом в системе управляемый преобразователь – двигатель. |
4 |
4 |
2 |
||
| Тема 2.3 Принципы позиционирования электроприводов |
4 |
4 |
|||
| Раздел 3 Замкнутые системы управления электроприводами |
40 |
24 |
12 |
16 |
|
| Тема 3.1Замкнутые системы стабилизации скорости и момента электропривода постоянного тока с промежуточным усилителем |
4 |
2 |
2 |
||
| 1 |
2 |
3 |
4 |
5 |
6 |
| Тема 3.2 Система стабилизации момента и скорости электропривода постоянного тока при питании от источника тока |
2 |
2 |
|||
| Тема 3.3 Системы подчиненного регулирования параметров электропривода |
14 |
10 |
6 |
4 |
|
| Тема 3.4 Управление скоростью и моментом двигателя при регулировании скорости во второй зоне (изменением магнитного потока) |
6 |
2 |
4 |
||
| Тема 3.5Системы стабилизации скорости и момента электроприводов переменного тока |
6 |
4 |
2 |
||
| Тема 3.6 Регулирование момента и скорости частотно – управляемых электроприводов |
8 |
4 |
4 |
||
| Тема 3.7 Автоматическое управление возбуждения синхронных двигателей |
10 |
10 |
6 |
||
| Итого: |
96 |
76 |
20 |
20 |
Содержание учебной дисциплины и методические указания
Раздел 1 Преобразователи электрической энергии
Тема 1.1 Управляемые выпрямители. Динамические свойства вентильного преобразователя (ВП).
Структурная и обобщенная схемы ВП. Основные характеристики ВП . Свойства собственно вентильного преобразователя. Схемы соединений преобразователей (мостовые, нулевые). Динамические свойства ВП.
Студент должен:
знать:
- объем, структуру, порядок изучения учебной дисциплины;
- назначение элементов и принцип работы схем ВП ;
- внешние характеристики ВП для различных углов включения вентилей.
уметь:
- проявлять самостоятельность, инициативу, прилежание при изучении дисциплины.
Методические указания
В обобщенном виде схема т-фазного вентильного преобразователя (ВП) представлена на рис.1
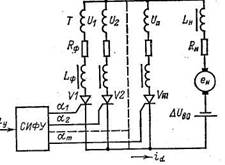
Рисунок 1- Обобщенная схема ВП
В общем случае цепь нагрузки состоит из ЭДС двигателя, индуктивности и активного сопротивления нагрузки, сглаживающего реактора, токонесущих проводов.
|
|
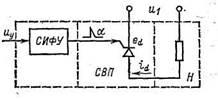
В упрощенном виде структурная схема вентильного преобразователя представлена на рис.2 тремя основными элементами: собственно вентильным преобразователем СВП, цепью нагрузки Н, системой импульсно – фазового управления СИФУ.
Основными характеристиками ВП яв ляются (рис. 3.): характеристика управления Е d = f ((Uy ) и внешняя характеристика Ud = f ( Id ).
Рисунок 2- Структурная схема ВП
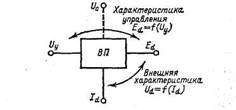
Рисунок 3 –Функциональные связи в ВП
Свойства СВП определяются законом изменения выходной координаты Е d при отсут ствии тока нагрузки Id в зависимости от входной величины, которой является угол управления a .
Динамические свойства СВП определя ются рядом специфических особенностей: дискретностью подачи управляющих воздействий, интенсивность изменения которых определяется не только числом фаз преобразователя, но и темпом их изменения; неполной управляемостью вентилей (включение в момент подачи импульса, а выключение только при спадании тока до определенного значения).
Так как предельная наибольшая час тота системы, в которую включен ВП, ограничена, то становится важной оценка динамических возможностей преобразователя как импульсного звена.
Неполная управляемость вентилей проявляется при скорости изменения управля ющего сигнала больше критической, когда ЭДС СВП не определяется законом изменения угла управления, а представляет собой отрезок синусоиды ЭДС, соответствующей вентилю, который был открыт последним.
Вопросы для самоконтроля:
1 Объясните назначенье элементов обобщенной схемы ВП.
2 Какими характеристиками описывается ВП?
3 Что относится к динамическим свойствам СВП?
4 Начертите схему соединений преобразователей (мостовую) и поясните принцип работы.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 1.2 Системы импульсно - фазового управления (СИФУ) тиристорами
Основные требования, предъявляемые к СИФУ. Вертикальный принцип построения СИФУ. Структурная и принципиальная схемы полупроводникового СИФУ. Характеристики СИФУ. Достоинства и недостатки СИФУ.
Студент должен:
знать:
- требования, предъявляемые к СИФУ;
- назначение элементов и принцип работы схем СИФУ ;
- регулировочные характеристики СИФУ;
- достоинства и недостатки СИФУ.
Методические указания
В выпрямителях в качестве управляемых ключей используются тиристоры. Для открывания тиристора необходимо выпол нение двух условий:
• потенциал анода должен превышать потенциал катода;
• на управляющий электрод необходимо подать открываю щий (управляющий) импульс.
Момент появления положительного напряжения между анодом и катодом тиристора называется моментом естественного открывания. Подача открывающего импульса может быть задержана относительно момента естественного открывания на угол открывания. Вследствие этого задерживается начало прохождения тока через вступающий в работу тиристор и регулируется напряжение выпрямителя.
Для управления тиристорами выпрямителя используется сис тема импульсно-фазового управления (СИФУ), выполняющая следующие функции:
• определение моментов времени, в которые должны откры ваться те или иные конкретные тиристоры; эти моменты време ни задаются сигналом управления, который поступает с выхода САУ на вход СИФУ;
• формирование открывающих импульсов, передаваемых в нужные моменты времени на управляющие электроды тиристо ров и имеющих требуемые амплитуду, мощность и длительность.
По способу получения сдвига открывающих импульсов отно сительно точки естественного открывания различают горизон тальный, вертикальный и интегрирующий принципы управления. При горизонтальном управлении управ ляющее переменное синусоидальное напряжение u у сдвигается по фазе (по горизонтали) по отношению к напряжению u 1 , пи тающему выпрямитель. В момент времени t = из управляю щего напряжения формируются прямоугольные отпирающие импульсы Ugt - Горизонтальное управление в электроприводах практически не применяется, что обусловлено ограниченным диапазоном регулирования угла а (около 120°).
При вертикальном управлении момент по дачи открывающихся импульсов определяется при равенстве управляющего напряжения uy (постоянного по форме) с перемен ным опорным напряжением u пил , (по вертикали). В момент равен ства напряжений формируются прямоугольные импульсы ugt .
При интегрирующем управлении момент подачи открывающих импульсов определяется при равенстве пе ременного управляющего напряжения u у с постоянным опор ным напряжением U оп . В момент равенства напряжений форми руются прямоугольные импульсы ugt .
Вопросы для самоконтроля:
1. Назовите принципы управления тиристорами.
2. Нарисуйте структурную схему вертикальной СИФУ.
3. Поясните принцип действия вертикальной СИФУ.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 1.3 Реверсивные вентильные преобразователи (РВП) напряжения
Общие сведения. Схема встречно – параллельного включения преобразователя. Схема перекрестного включения преобразователя. Обобщенная перекрестная схема замещения m -фазного преобразователя. Методы управления вентильными комплектами реверсивного РВП.
Студент должен:
знать:
- назначение элементов и принцип работы схем РВП ;
- принцип совместного управления РВП ;
- принцип раздельного управления РВП .
Методические указания
Макси мальное быстродействие реверсивного электропривода дости гается при использовании реверсивного выпрямителя, обеспе чивающего возможность прохождения тока в якоре в обоих направлениях.
Реверсивный выпрямитель образуется соединением по соответствующей схеме двух нереверсивных, называемых комплектами тиристоров. Комплекты в большинстве применений включаются по перекрестным или встречно-параллельным схемам, питаются от общей сети (или трансформатора) и имеют общие элементы системы управления тиристорами (СУТ).
Для управления комплектами тиристоров применяют два принципа (совместное и раздельное управление), которые оказывают влияние на построение силовой схемы реверсивного выпря мителя. В мощных выпрямителях с совместным управлением ис пользуют преимущественно перекрестную схему, в выпрямителях средней и малой мощности с раздельным управлением — в основ ном встречно-параллельную схему включения комплектов.
Вопросы для самоконтроля:
1. Приведите выражение характеристики управляемого выпрями теля для режима непрерывного тока.
2. Чем обусловлено возникновение режима прерывистого тока?
3. Нарисуйте внешние характеристики выпрямителя: для режима непрерывного тока; для режима прерывистого тока.
4. Назовите принципы управления комплектами вентилей ревер сивного выпрямителя.
5. Каковы назначение и функции логического переключающего уст ройства?
6. Сопоставьте достоинства и недостатки совместного и раздель ного управления.
7. Каковы особенности регулирования скорости вниз и вверх от номинальной?
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 1.4 Широтно-импульсные преобразователи (ШИП) постоянного тока
Общие сведения. Функциональная схема ШИП. Формирование широтно- модулированных сигналов посредством прямоугольных импульсов. Схема реверсивного ШИП. Блок-схема нереверсивного ШИП. Характеристики ШИП.
Студент должен:
знать:
- назначение элементов и принцип работы схем ШИП ;
- способы получения модулированных импульсов;
- силовую часть ШИП.
Методические указания
Для электроприводов малой мощности (до десятка киловатт) широкое распространение получают полупроводниковые импульсные преобразователи, питающиеся через выпрямитель от сети переменного тока и работающие с широтно-импульсным регулированием (ШИР), когда амплитуда и частота импульсов постоянны, а длительность их меняется. В настоящее время широко применяются широтно - импульсные преобразователи (ШИП). По сравнению с управляемыми ВП ШИП отличают более высокие динамические показатели при высоком диапазоне регулирования скорости—порядка Д= (2000-6000) : 1, лучшее использование двигателей по току, меньшее влияние на питающую сеть.
Для системы с ШИП (рис.1) среднее напряжение на нагрузке Uср определяется следующим образом:
Uср = Uп g,
где Uп – напряжение питания; g = t / Tк –скважность импульсов; Tк– период коммутации; t – длительность рабочей части Tк.
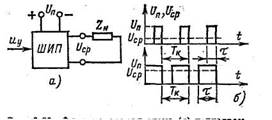
Рисунок 1 – Функциональная схема (а) и диаграммы напряжений (б)ШИП при разных g.
На рис. 2 изображена блок-схема ШИП, который состоит из следующих основных элементов: усилителя постоянного тока УПТ (при невысоких требованиях к жесткости механических характеристик и Д до 200 : 1 может быть исключен из схемы), широтно-импульсного модулятора ШИМ, усилителей импульсов УИ-1 — УИ-4 (в обдаем случае л), СВП в виде импульсного усилителя мощности ИУМ (с рабочими и коммутирующими вентилями) и устройства токоограничения УТО.
ШИМ формирует необходимые по длительности импульсы в зависимости от уровня сигнала управления uу .
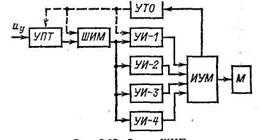
Рисунок 2 – Схема ШИП
Вопросы для самоконтроля:
1 Назначение ШИП.
2 Перечислите основные элементы ШИП.
3 какие способы получения модулированных импульсов знаете?
4 Начертите функциональную схему и поясните диаграммы напряжений ШИП.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 1.5 Преобразователи частоты для управления асинхронными двигателями. Принцип работы автономного инвертора
Общие сведения. Электромеханический преобразователь частоты. Функциональная схема преобразователя частоты с промежуточным звеном постоянного тока. Схема мостового инвертора и диаграммы выходных напряжений при различных углах проводимости тиристоров.
Студент должен:
знать:
- назначение элементов и принцип работы схем преобразователя частоты с промежуточным звеном постоянного тока ;
- назначение элементов и принцип работы схем мостового инвертора;
- диаграммы выходных напряжений при различных углах проводимости тиристоров.
Методические указания
В частотно-управляемом асинхронном ЭП применяются различные инверторы, отличающиеся видами коммутации тиристоров, схемами их соединения, способами регулирования напряжения на АД и др.
В зависимости от способа коммутации тока тиристоров инверторы делятся на ведомые сетью и автономные. В инверторах, ведомых сетью (их еще называют зависимыми инверторами), коммутация тока с тиристора на тиристор обеспечивается напряжением источника питания.
В автономных (независимых) инверторах для коммутации тока используются дополнительные элементы - тиристоры, диоды, конденсаторы и катушки индуктивности (дроссели).
Автономные инверторы делятся на инверторы напряжения и тока.
Регулирование выходного напряжения ПЧ может осуществляться несколькими способами. В ПЧ с непосредственной связью оно осуществляется так же, как и в управляемых выпрямителях. Такое управление получило название фазового.
В ПЧ со звеном постоянного тока регулирование напряжения на нагрузке (статоре АД) производится двумя способами - или с помощью специального регулятора напряжения, или самим инвертором.
Первый способ, в свою очередь, может быть реализован двумя путями - за счет использования управляемого выпрямителя (фазовое управление) или неуправляемого выпрямителя и размещаемого между ним и инвертором широтно-импульсного преобразователя (ШИП) (амплитудное регулирование напряжения). К достоинствам этого способа следует отнести широкий диапазон регулирования напряжения и возможность использована для любого типа инвертора.
Второй способ связан с совмещением функций регулирования частоты и напряжения в самом инверторе. Оно реализуется с помощью соответствующих алгоритмов управления тиристорами и предусматривает использование широтно-импульсной модуляции (ШИМ).
Частотное управление является весьма экономичным, так как обеспечивает регулирование скорости АД без больших потерь мощности в роторной цепи, ухудшающих КПД ЭП и приводящих к необходимости завышения мощности АД.
Частотное регулирование скорости может осуществляться плавно, в широком диапазоне, в обе стороны от естественной характеристики, т. е. АД может иметь скорость как больше, так и меньше номинальной. При этом регулировочные характеристики имеют высокую жесткость, а АД сохраняет большую перегрузочную способность.
Реализуемый диапазон регулирования скорости в разомкнутых системах составляет 5... 10, а в замкнутых системах (при использовании обратных связей) его значение может достигать 1000 и более.
Вопросы для самоконтроля:
1 На какие группы подразделяются тиристорные преобразователи частоты?
2Перечислите достоинства преобразователей с промежуточным звеном постоянного тока.
3 Поясните функциональную схему преобразователя частоты с промежуточным звеном постоянного тока.
4 Принцип действия мостового инвертора.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 1.6 Инверторы напряжения и инверторы тока
Общие сведения. Условные схемы однофазных инверторов напряжения и тока. Диаграммы однофазных инверторов напряжения и тока. Внешние характеристики идеализированных инверторов напряжения и тока. Способы принудительной коммутации тиристоров в автономных инверторах. Схемы автономных инверторов. Методы регулирования напряжения на выходе преобразователя частоты.
Студент должен:
знать:
- назначение элементов и принцип работы схем однофазных инверторов напряжения и тока ;
- внешние характеристики идеализированных инверторов напряжения и тока;
- назначение элементов и принцип работы схем автономных инверторов;
- методы регулирования напряжения на выходе преобразователя частоты.
Методические указания
При активно-индуктивной наг рузке электромагнитные процессы в инверторе имеют более сложный характер. Для их ана лиза оказывается полезным разделение всех автономных инверторов на автономные инверторы напряжения (АИН) и автономные инверторы тока (АИТ). Пояснить эти понятия можно на примере однофазных мостовых схем (рис.1, а, б), имеющих активно-индуктивную нагрузку.
|
|

Рисунок 1 – Условная схема мостового инвертора (а) и диаграммы выходных напряжений при углах проводимости тиристоров 180градусов (б) и 120градусов (в).
Инвертор напряжения должен быть выполнен на полностью управляемых вентилях VI — V 4, способных включаться и выклю чаться в заданный момент времени при подаче на них управляющего сигнала. Попарное периодическое включение и отключение вентилей VI , VЗ и V2, V4 приводит к тому, что напряжение на нагрузке uн имеет прямоуголь ную форму с амплитудой, равной напряжению источника питания. Кривая тока в наг рузке будет состоять из отрезков экспоненты (рис. 2, в). Пусть произошла коммутация в схеме таким образом, что вентили VI и V З выключились, а вентили V2 и V4 открылись. Ток в нагрузке индуктивного характера имеет направление, встречное по отношению к направлению проводимости включенных вентилей. Для обеспечения цепи протекания этого тока в схемы введены диоды VD1—VD4, включенные встречно-параллельно тиристорам VI — V4. Диоды оказываются открытыми, когда ток и напряжение нагрузки имеют про тивоположные знаки. При этом ток, потребляемый от источника id , меняет свое направление и протекает навстречу напряжению Е. Если источник имеет одностороннюю проводимость (выпрямитель), его необходимо зашунтировать конденсатором, который будет заряжаться, когда ток протекает от инвертора к источнику, и разряжаться, когда ток потребляется от источника. Этот конденсатор должен иметь достаточную емкость для того, чтобы пульсации напряжения источника питания были незначительны.
|
|
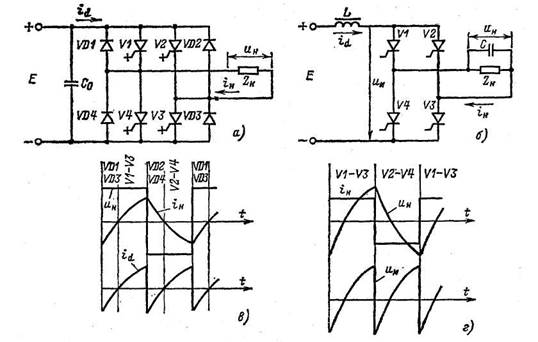
Рисунок 2 – Условные схемы однофазных инверторов напряжения (а) и тока (б) и их рабочие диаграммы (в и г) соответственно.
Инвертор тока (рис. 2, б) может быть выполнен на приборах с неполной управляемостью. В этом случае параллельно нагрузке необходимо включить конденсатор, который будет обеспечивать выключение пары тиристоров при включении другой пары и поддерживать на выключаемых тиристорах отрицательное напряжение в течение времени, необходимого для восстановления ими управляющих свойств. В соответствии со способом подключения коммутирующего конденсатора такой инвертор называют параллельным. На вход АИТ подключается достаточно большая индуктивность с тем, чтобы пульсации тока, потребляемого от источника, были невелики. При этом ток в нагрузке, если конденсатор также считать элементом нагрузки, имеет прямоугольную форму. Напряжение: на нагрузке и его форма определяются нагрузкой и ее характером. Напряжение: на входе инвертора ии имеет форму, показанную на рис. 2, г. Те интервалы времени, когда напряжение ии отрицательно, соответствуют времени закрытого состояния тиристоров.
Таким образом, основная особенность АИН заключается в том, что напряжение на нагрузке не зависит от нее, а определя ется лишь очередностью коммутации управ ляемых вентилей в инверторе. Это достигается введением в схему обратных диодов, предназ наченных для пропускания индуктивного тока нагрузки, и включением параллельно источнику конденсатора Со , на который этот ток замыкается.
В АИТ, наоборот, очередность коммута ции тиристоров определяет форму тока, а форма напряжения зависит от нагрузки. Это обусловлено включением на вход инверто ра реактора с достаточно большой индуктивностью.
Вопросы для самоконтроля:
1 Поясните понятие АИН.
2 Поясните понятие АИТ.
3 Назначение конденсатора в условных схемах АИН и АИТ.
4 В каких инверторах форма напряжения зависит от нагрузки.
5 Особенности АИН и АИТ.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 1.7 Преобразователи частоты с непосредственной связью (ПЧН)
Принцип работы ПЧН. Трехфазная и трехфазная мостовая схемы ПЧН. Принципы управления ПЧН. Принципы построения систем управления ПЧН. Достоинства и недостатки ПЧН. Типы промышленных преобразователей частоты. Выбор трансформатора для тиристорного электропривода.Выбор сглаживающего дросселя.
Студент должен:
знать:
- назначение элементов и принцип работы схем ПЧН ;
- состав и функциональные схемы тиристорных электроприводов;
- трансформаторное и реакторное оборудование тиристорных электроприводов.
уметь:
- осуществлять выбор трансформатора для тиристорного электропривод;
- осуществлять выбор сглаживающего дросселя.
Методические указания
В настоящее время большое распространение получили статические ПЧ, названные так потому, что в них используются не имеющие движущихся частей элементы и устройства, такие как полупроводниковые приборы, реакторы, конденсаторы и др. Развитие статических ПЧ особенно ускорилось в связи с массовым производством тиристоров и силовых транзисторов. Использование статических ПЧ позволило повысить технико-экономические показатели регулируемого частотного ЭП: увеличить его КПД и быстродействие, устранить шум и упростить обслуживание. Статические ПЧ могут быть без звена постоянного тока с непосредственной связью питающей сети и нагрузки и с промежуточным звеном постоянного тока.
ПЧ без звена постоянного тока с непосредственной связью питающей сети и нагрузки может обеспечивать регулирование частоты на статоре АД только в сторону ее уменьшения по сравнению с сетевой.
Важной особенностью ПЧ со звеном постоянного тока является возможность обеспечения с их помощью плавного регулирования частоты напряжения на статоре АД как ниже, так и выше сетевой, в силу чего такие ПЧ получили наибольшее распространение.
Вопросы для самоконтроля:
1 Поясните принцип работы ПЧН.
2 Перечислите принципы управления ПЧН.
3 Преимущество согласованного управления.
4 В чем заключается отличительная особенность раздельного управления вентилями с контролем тока нагрузки?
5 Принципы построения систем управления ПЧН.
6 Достоинства ПЧН.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Раздел 2 Принципы управления электроприводами
Тема 2.1 Принципы автоматического управления скоростью и моментом резисторных электроприводов
Структурная схема резисторного электропривода. Управление моментом с контролем скорости. Управление моментом с контролем тока.
Студент должен:
знать:
- назначение элементов и принцип работы структурной схемы резисторного электропривода ;
- реализация и применение принципа управления моментом с контролем скорости ;
- реализация и применение принципа управления моментом с контролем скорости.
Методические указания
Широкое распространение во всех отраслях промышленности получили резисторные элеектроприводы с питанием электрических двигателей от сети с неизменным напряжением. Структура таких электроприводов приведена на рис. 1 Подключение обмоток двигателей М к питающей сети производит силовое устройство Q , получающее команды от управляющего устройства А. Командное устройство S в таких электроприводах обес печивает команду на начало процессов пуска, реверса и остановки двигателя и определяет значение установившейся скорости двигателя. Устройства обратной связи обеспечивают контроль работы рабочей машины по положению ее исполнительного органа (В1) и контроль скорости и момента (В2) электропривода в динамических режимах пуска и торможения электрического двигателя.
|
|
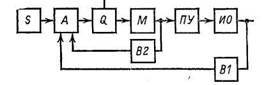
Рисунок 1– Структурная схема резисторного элек тропривода.
В группе резисторных электроприводов большое место занимают электроприводы без регулирования скорости, работающие с постоянной установившейся скоростью.
Резисторные электроприводы, как и любые другие, обеспечивают динамические (переходные) и статические (установившиеся) режимы работы. В динамических режимах обеспечиваются пуск, реверсирование и остановка электропривода с торможением и без торможения. Процессы пуска в резисторных электроприводах обеспечиваются прямым подключением обмоток двигателя к питающей сети без ограничения и с ограничением пускового момента (тока). Без ограничения момента пускаются АД с короткозамкнутым ротором, маломощные ДПТ (до сотен ватт), приводящие в движение исполнительные органы рабочих машин, не требующих ограничения момента в переходных режимах и допускающих ускорения, обеспечиваемые двигателем при его прямом подключении к сети. Устройство управления А в таких электроприводах (см. рис.1) только усиливает сигналы управления, поданные командным устройством S и датчиком обратной связи по положению рабочего органа рабочей машины В1, или часто отсутствует совсем. В этом случае сигналы управления подаются сразу на силовое устройство Q.
С ограничением моментов запускаются АД с фазным ротором и ДПТ средней и большой мощности (единицы — сотни киловатт), в ко торых независимо от требований механизма пусковые токи ограничиваются на уровне допустимой перегрузочной способности.
Вопросы для самоконтроля:
1 Поясните структуру автоматического управления скоростью и моментом резисторных электроприводов.
2 В каких режимах могут работать резисторные электропривода?
3 Каким образом обеспечивается управление моментом с контролем скорости?
4 Каким образом обеспечивается управление моментом с контролем тока?
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 2.2 Принципы автоматического управления скоростью и моментом в системе управляемый преобразователь – двигатель.
Схемы питания электродвигателей постоянного и переменного токов. Основные принципы управления. Структурные схемы системы регулирования скорости и момента электропривода. Основные требования, предъявляемые к электроприводам с замкнутыми системами регулирования скорости.
Студент должен:
знать:
- назначение элементов и принцип работы схем питания электродвигателей постоянного и переменного токов ;
- назначение элементов и принцип работы структурной схемы системы регулирования скорости и момента электропривода ;
- назначение элементов и принцип работы структурных схем систем электропривода;
- основные показатели качества регулирования скорости и момента в установившихся и переходных режимах .
Методические указания
Автоматическое управление скоростью и моментом наиболее полно проявляется при регулировании напряжения электрического двигателя в системе управляемый преобразователь — двигатель (УП—Д). В электроприводах постоянного тока питание электрического двигателя осуществляется от управляемых преобразователей (выпрямителей) U М и продолжают применяться электромашинные вращающиеся преобразователи — генераторы с вентильными возбудителями. Использование генераторов постоянного тока связано с неудовлетворительными энергетическими показателями сетей, на которые оказывают большое влияние процессы коммутации вентилей при использовании вентильных преобразователей. При необходимости регулирования скорости изменением магнитного потока двигателя его обмотка возбуждения питается также от управляемого преобразователя.
В электроприводах переменного тока используются также статические вентильные управляемые преобразователи напряжения и частоты, позволяющие обеспечить управление скоростью и моментом двигателя путем изменения частоты и напряжения питания.
Системы УВП—Д осуществляют задание и автоматическое поддержание постоянства скорости или момента двигателя в установившихся и переходных режимах. Такие системы выполняются замкнутыми с обратными связями по скорости, напряжению и току с питанием двигателя от управляемого преобразователя напряжения, тока или частоты. Это позволяет обеспечить большие диапазоны регулирования скорости (до 10 000 и выше), высокие статические и динамические показатели точности, при которых отклонения момента и скорости двигателя от заданных значений составляют менее 0,01 %.
Такие системы электропривода обеспечивают стабилизацию параметра регулирования на одном заранее заданном уровне. Поэтому процесс стабилизации является частным случаем процесса управления и называется регулированием и системы стабилизации называются системами регулирования параметров. В них используются принципы регулирования по отклонению и возмущению.
Основным принципом управления (регулирования) является принцип обратной связи, позволяющий осуществлять контроль регулирования по отклонению управляемого параметра от заданного значения. Структурная схема системы регулирования скорости и момента электропривода приведена на рис. 1. При регулировании (стабилизации) скорости двигателя используется главная отрицательная обратная связь по скорости, осуществляющая контроль скорости двигателя в динамических и статических режимах с помощью датчика обратной связи по скорости В2. Командное устройство S задает уровень регулирования скорости, поэтому его называют задатчиком скорости. Управляющее устройство, в качестве которого обычно используется сумматор А W, сравнивает сигнал задатчика U з с сигналом обратной связи U с , определяет ошибку управления (Uу = U3 —U!с и вырабатывает управляющий сигнал, пропорциональный ошибке и ее знаку. В системах регулирования скорости применяются также внутренние обратные связи, обеспечивающие обратную связь по внутреннему параметру, например по напряжению U двигателя. Она осуществляется с помощью датчиков напряжения UV.
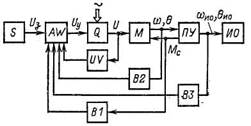
Рисунок 1– Структурная схема системы регулиро вания скорости и момента электропривода.
Стабилизация момента двигателя обеспе чивается в рассматриваемых системах регули рования с помощью отрицательной обратной связи по току двигателя или для этого используются системы с питанием двигателей от источников тока .
Вопросы для самоконтроля:
1 Поясните назначение всех элементов структурной схемы системы регулиро вания скорости и момента электропривода.
2 Каким образом обеспечивается стабилизация момента двигателя?
3 Классификация системы стабилизации скорости и момента.
4 Основные требования к ЭП с замкнутыми системами регулирования скорости.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 2.3 Принципы позиционирования электроприводов
Общие сведения. Автоматическое управление положением. Основные требования, предъявляемые к позиционным электроприводам.
Студент должен:
знать:
- реализация и применение принципа позиционирования электроприводов ;
- требования, предъявляемые к позиционным электроприводам;
Методические указания
При автоматизации промышленных установок широкое распространение нашло управление движением исполнительного органа рабочей машины с контролем пути (положения), когда управляющие команды на включение и отключение двигателя подаются при достижении исполнительным органом машины определенного положения. Контроль пути не используется при управлении контакторами ускорения при пусках и торможениях двигателя, так как путь, проходимый механизмом, при этом очень мал. Управляющая команда от конечного или путевого выключателя используется для начала пуска или торможения двигателя при его остановке или реверсировании, а также для изменения скорости двигателя, связанной с технологическим режимом работы механизма.
Автоматическое управление положением осуществляется двух видов: 1) дискретное позиционирование электропривода в заданных точках пути по дискретным сигналам путевых датчиков; 2) непрерывное автоматическое управление положением по отклонению для осуществления дозированных перемещений или по заданной программе.
Независимо от способа управления элек тропривод обеспечивает: задание позиции или значения перемещения; контроль перемеще ния в позиции; точный останов в заданной позиции. Задание позиции может осуществляться дискретно или непрерывно. Контроль перемещения определяется требуемой точностью останова в заданной позиции и производительностью рабочей машины, зависящей от скорости перехода в заданную позицию. В зависимости от вида управления контроль позиции осуществляется дискретно или непрерывно с использованием датчиков положения или перемещения.
При дискретном позиционировании применяются датчики положения. Они фиксируют заданное конечное положение дискретно при достижении исполнительным органом заданной позиции. Контроль промежуточных положений не осуществляется. В этом случае в заданной позиции электродвигатель автоматически отключается и останавливается обычно с наложением механического тормоза. Задачей электропривода является точная остановка исполнительного органа рабочей машины в заданной позиции. Та кой вид управления применяется при невысокой точности позиционирования с редко переналаживаемым циклом перемещений.
При непрерывном управлении положе нием используются датчики перемещения, осу ществляющие контроль положения исполнительного органа непрерывно. Они выдают информацию о положении исполнительного органа на протяжении всего пути в непрерывной (аналоговой) или в дискретной (цифровой) форме. Такой вид управления преимущественно используется в системах позиционирования высокой точности с часто переналаживаемым циклом перемещений.
Вопросы для самоконтроля:
1 Каким образом осуществляется автоматическое управление положением?
2 Как осуществляется задание позиции?
3 Какие датчики применяются при дискретном позиционировании?
4 Какой вид управления применяется при невысокой точности позиционирования?
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Раздел 3 Замкнутые системы управления электроприводами
Тема 3.1Замкнутые системы стабилизации скорости и момента электропривода постоянного тока с промежуточным усилителем
Функциональная схема электропривода постоянного тока. Структурная схема электропривода постоянного тока. Функциональная схема электропривода с отрицательной обратной связью по ЭДС двигателя. Функциональная схема электропривода с отрицательной обратной связью по току с отсечкой. Функциональная схема и электромеханические характеристики электропривода с отрицательными обратными связями по скорости и току с отсечками. Функциональная схема электропривода с непрерывными обратными связями по скорости и току с отсечками. Функциональная схема, характеристики, переходные процессы и структурная схема системы электропривода с ограничением сигнала управления и токовой отсечкой. Функциональная схема, электромеханические характеристики, переходные процессы и структурная схема системы электропривода с ограничением сигнала управления и положительной обратной связью по ЭДС двигателя. Функциональная и структурная схемы системы электропривода с независимым управлением стабилизацией скорости и момента двигателя. Структурные схемы электропривода при возмущающем воздействии по нагрузке.
Студент должен:
знать:
- назначение элементов и принцип работы функциональной схемы электропривода постоянного тока ;
- назначение элементов и принцип работы структурной схемы электропривода постоянного тока ;
- назначение элементов и принцип работы функциональной схемы электропривода с отрицательной обратной связью по ЭДС двигателя ;
- назначение элементов и принцип работы функциональной схемы электропривода с отрицательной обратной связью по току с отсечкой;
- назначение элементов и принцип работы функциональной схемы электропривода с отрицательными обратными связями по скорости и току с отсечками;
- назначение элементов и принцип работы функциональной схемы электропривода с непрерывными обратными связями по скорости и току с отсечками;
- назначение элементов и принцип работы функциональной схемы электропривода с ограничением сигнала управления и токовой отсечкой;
- назначение элементов и принцип работы функциональной и структурной схем системы электропривода с ограничением сигнала управления и положительной обратной связью по ЭДС двигателя;
- назначение элементов и принцип работы функциональной и структурной схем системы электропривода с независимым управлением стабилизацией скорости и момента двигателя.
Методические указания
Широкое распространение в электро приводах постоянного тока получила статическая система непрерывного действия стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивающая регулирование скорости и ее стабилизацию с высокой точностью в статических и динамических режимах. Функциональная схема такой системы приведена на рис. 1.
|
|
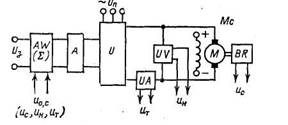
Рис. 7.13. Функциональная схема электропри вода постоянного тока.
Она включает в себя двигатель М, преобразователь U , промежуточный усили тель А, измерительный элемент АW (сум матор) и обратную связь.
В качестве преобразователей в таких системах электропривода используются генераторы постоянного тока, электромашинные и магнитные усилители и полупроводниковые (транзисторные и тиристорные) управляемые выпрямители.
В качестве промежуточных усилителей в электроприводах используются электромашинные, магнитные, транзисторные и интегральные усилители.
Вопросы для самоконтроля:
1 Поясните назначение всех элементов функциональной схемы электропривода постоянного тока.
2 Что используется в качестве преобразователей в таких схемах?
3 Что используется в качестве промежуточных усилителей в таких схемах?
4 Какие обратные связи применяются в системах электропривода постоянного тока?
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 3.2 Система стабилизации момента и скорости электропривода постоянного тока при питании от источника тока
Общие сведения. Функциональная схема и механические характеристики электропривода постоянного тока с индуктивно-емкостным преобразователем.
Студент должен:
знать:
- назначение элементов и принцип работы принципиальной схемы электропривода постоянного тока с индуктивно-емкостным преобразователем ;
- назначение элементов и принцип работы функциональной схемы электропривода постоянного тока с индуктивно-емкостным преобразователем ;
- достоинства и недостатки электропривода постоянного тока с индуктивно-емкостным преобразователем .
Методические указания
Стабилизация момента и тока двигателя постоянного тока осуществляется также в эле ктроприводах с источником тока.
|
|

Рисунок 1–Принципиальная схема (а) и механи ческие характеристики (б) электропривода посто янного тока с индуктивно-емкостным преобразо вателем, обеспечивающим регулирование момента двигателя.
Наибольшее распространение в электро приводе получили трехфазные индуктивно-емкостные преобразователи (ИЕП), являющиеся источником тока. Они используются для питания ДПТ. Схема такого преобразователя приведена на рис. 1, а. Эта схема при определенном выборе параметров обеспечивает стабилизацию тока якоря в широких пределах изменения противо-ЭДС двигателя. Индуктивности и емкости, включенные в треугольник, образуют трехфазный источник тока с выходом на переменном токе, а трехфазный мостовой выпрямитель V позволяет подключить к источнику тока обмотку якоря двигателя постоянного тока. Принцип действия ИЕП основан на явлении резонанса напряжений в цепи L , С, ток в которой при равных сопротивлениях индуктивности хL и емкости хC не зависит от сопротивления нагрузки, а определяется линейным напряже нием питающей сети и сопротивлением х = хL = хC
Достоинством электропривода с ИЕП является его простота, а недостатком плохие массо-габаритные показатели и низкое быстродействие.
Вопросы для самоконтроля:
1 Принцип действия схемы электропривода посто янного тока с индуктивно-емкостным преобразо вателем, обеспечивающим регулирование момента двигателя.
2 Каким образом обеспечивается стабилизация тока якоря?
3 На каком явление основан принцип действия ИЕП?
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 3.3 Системы подчиненного регулирования параметров электропривода
Общие сведения. Структура системы подчиненного регулирования. Структурная схема тиристорного электропривода с внешним контуром скорости и внутренним контуром тока якоря. Структурная схема системы регулирования с внутренним контуром напряжения преобразователя. Состав и функциональные схемы тиристорных электроприводов.
Студент должен:
знать:
- назначение элементов и принцип работы системы подчиненного регулирования;
- назначение элементов и принцип работы с труктурной схемы тиристорного электропривода с внешним контуром скорости и внутренним контуром тока якоря;
- назначение элементов и принцип работы с труктурной схемы системы регулирования с внутренним контуром напряжения преобразователя.
уметь:
- определять по силовой схеме серию комплектного тиристорного электропривода;
- расшифровывать типы комплектных тиристорных электроприводов;
- объяснить назначение и взаимосвязь каждого элемента функциональной схемы электроприводов серий КТЭУ, ЭКТ, КТЭ, ЭТ, ЭТУ, ЭТРП.
Методические указания
В настоящее время в электроприводе при создании систем регулирования нашел широкое применение принцип последовательной коррекции или так называемого подчиненного регулирования .
Сущность его заключается в следующем.
Объект регулирования представляется в виде последовательно соединённых звеньев, выходными параметрами которых являются существенные координаты объекта, например ток, напряжение, ЭДС, магнитный поток, момент, скорость, положение.
Для управления каждой из этих коорди нат организуется отдельный регулятор, образующий с объектом контур, замкнутый соответствующей обратной связью.
Регуляторы соединяются последовательно, так что выход одного является входом другого.
При этом замкнутые контуры регулиро вания образуют систему, в которой имеется внутренний контур управления, состоящий из регулятора и одного из звеньев объекта управления, первый внешний контур, включающий в себя внутренний контур и следующее звено объекта, управления, второй внешний контур, включающий в себя первый и следующее звено объекта управления и т. д.
Выходной сигнал каждого внешнего кон тура является задающим для последующего, заключенного внутри него контура. Таким образом, каждый внутренний контур регулирования подчинен соответствующему внешнему.
Указанное иллюстрируется рис. 1, на котором внешний контур образован регулятором 1 и звеном объекта управления 6, подчиненный ему внутренний контур образован регулятором 2 и звеном объекта управления 5 и последний, подчиненный внутренний контур образован регулятором 3 и звеном объекта управления 4. В некоторых случаях объект управления обладает более сложной структурой, чем показано на рис. 1. Имеются внутренние и перекрестные связи, и принцип последовательной коррекции неприменим в чистом виде. В этих ситуациях на регуляторы подаются компенсирующие сигналы, принцип распространяется на отдельные части объекта управления или производятся структурные преобразования и регулируется некоторая обобщенная координата, являющаяся функцией координат объекта.
|
|
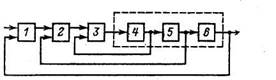
Рисунок 1– Структура системы подчиненного ре гулирования.
1-3 – регуляторы; 4—6 — звенья объекта управления.
Преимущества подчиненного регулирова ния по сравнению с параллельной коррекцией заключаются в упрощении решения задачи ограничения координат, облегчении наладки и, следовательно, сокращении сроков пуска объектов, в широких возможностях унификации узлов управления различными объектами.
Недостаток — некоторый проигрыш по быстродействию, связанный с последовательным воздействием на систему через внутренние контуры, а не сразу на входное звено объекта управления.
В большинстве случаев конкретного применения в электроприводе указанный недоста ток несуществен, а перечисленные выше пре имущества имеют решающее значение.
Обычно объект регулирования описывается математически и разбивается на звенья с известными передаточными функциями. В большинстве случаев известна желаемая передаточная функция замкнутой и разомкнутой систем регулирования. Она выбирается, исходя из требований к динамике объекта регулирования.
Принцип подчиненного регулирования значительно облегчает поиск передаточных функций регуляторов и реализацию желаемого управления.
Вопросы для самоконтроля:
1 В чем заключается сущность подчиненного регулирования ?
2 Поясните назначение элементов системы подчиненного ре гулирования.
3 Преимущества подчиненного регулирования.
4 Недостатки подчиненного регулирования.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 3.4 Управление скоростью и моментом двигателя при регулировании скорости во второй зоне (изменением магнитного потока)
Общие сведения. Функциональная и структурная схемы электропривода с регулированием скорости магнитным потоком. Функциональная и структурная схемы электропривода с регулированием скорости магнитным потоком с регулятором скорости. Функциональная и структурная схемы двухзонного электропривода
Студент должен:
знать:
- назначение элементов и принцип работы функциональной и с труктурной схем электропривода с регулированием скорости магнитным потоком;
- назначение элементов и принцип работы функциональной и с труктурной схем электропривода с регулированием скорости магнитным потоком с регулятором скорости.
Методические указания
При регулировании скорости ДПТ неза висимого возбуждения во второй зоне изменением магнитного потока обмотка возбуждения двигателя питается от управляемого преобразователя. Наибольшее распространение получили статические тиристорные преобразователи с однофазными, трехфазными мостовыми и нулевыми схемами выпрямления. При этом обмотка якоря двигателя может питаться от неуправляемого и управляемого преобразователей в зависимости от необходимости однозонного или двухзонного регулирования скорости.
При регулировании скорости только во второй зоне за счет изменения магнитного по тока и при номинальном напряжении на якоре применяется электропривод, функциональная схема которого приведена на рис. 1, а. Здесь обмотка якоря двигателя питается от неуправляемого выпрямителя V М, а обмотка возбуждения LM — от управляемого преобра зователя UL.. Для повышения жесткости механических характеристик в электроприводе используется стабилизация скорости, осу ществляемая отрицательной обратной связью по скорости двигателя, заведенной от тахоге-нератора ВR на вход управляемого преобразователя UL цепи обмотки возбуждения LМ и воздействующая на магнитный поток двигателя. Характеристика преобразователя в таком электроприводе имеет вид, приведенный на рис. 1, б. Это позволяет иметь номинальное напряжение возбуждения UВ,,НОМ и номинальный магнитный поток ФНОМ двигателя при отсутствии сигнала управления преобразователем u у и снижение Uв и Ф при возрастании u у .
Усилительные устройства АL и системы импульсно-фазового управления тиристор ными преобразователями UL используются те же, что и в преобразователях, питающих обмотку якоря двигателя в однозонных элек троприводах.
При повышении нагрузки на валу двига теля и снижении напряжения на якоре и ско рости повышается напряжение управления преобразователем uу ,в . Это приводит к сниже нию напряжения на обмотке возбуждения и снижению магнитного потока, что и повышает скорость двигателя и жесткость механической характеристики.
Пуск и торможение двигателя в таких электроприводах производится с помощью пусковых и тормозных резисторов в виде одно- или многоступенчатого пуска и обычно одноступенчатого динамического торможения.
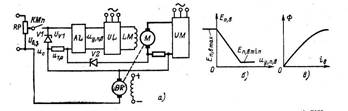
Рисунок 1– Функциональная схема электропривода с регулированием скорости магнитным пото ком (а); характеристика преобразователя UL . (б) и кривая намагничивания двигателя (в).
Для ограничения тока двигателя при пуске его до скорости выше основной в та ких электроприводах используется стабилизация тока, осуществляемая отрицательной обратной связью по току u Т с отсечкой, воз действующей на магнитный поток двигателя.
Вопросы для самоконтроля:
1 Поясните назначение всех элементов функциональной схемы электропривода с регулированием скорости магнитным пото ком.
2 Каким образом осуществляется пуск и торможение двигателя?
3 Каким образом осуществляется ограничение тока двигателя при пуске?
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 3.5Системы стабилизации скорости и момента электроприводов переменного тока
Общие сведения. Функциональная и структурная схемы асинхронного электропривода с преобразователем напряжения в цепи обмотки статора.
Студент должен:
знать:
- назначение элементов и принцип работы функциональной и с труктурной схем асинхронного электропривода с преобразователем напряжения в цепи обмотки статора;
Методические указания
Стабилизация (регулирование) скорости и момента в электроприводах переменного тока осуществляется с помощью управляе мых преобразователей (регуляторов) пере менного напряжения сети и преобразователей частоты, питающих обмотку статора, управляемых преобразователей в цепи ротора (реостатное регулирование и регулирование по схеме асинхронно-вентильного каскада) и с помощью электромагнитной муфты скольжения.
Стабилизация скорости в электроприво дах с управляемым преобразователем напряжения в цепи статора обеспечивается в замкнутой системе управления с отрицательной обратной связью по скорости, потому что преобразователь напряжения в разомкнутой системе обеспечивает регулирование момента электропривода. В качестве управляемых преобразователей напряжения используются тиристорные преобразователи (регуляторы) напряжения.
Функциональная схема асинхронного электропривода с преобразователем напряжения в цепи обмотки статора приведена на рис. 1, а. Преобразователь напряжения U с управляющим устройством AS, в качестве которого используется СИФУ тиристорного преобразователя, получает на вход сигнал рассогласования по скорости, равный
U у = U З – kc w ,
где U 3 — задающее напряжение системы ре гулирования скорости; kc = Uтг / w — коэффициент обратной связи по скорости при использовании в качестве датчика обратной связи тахогенератора постоянного тока. Напряжение управления uу может быть усилено промежуточным усилителем А.
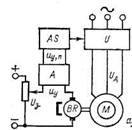
Рисунок 1 – Функциональная схема АД с преобразователем напряжения.
Вопросы для самоконтроля:
1 Каким образом осуществляется стабилизация скорости и момента в электроприводах переменного тока?
2 Поясните назначение всех элементов функциональной схемы асинхронного электропривода с преобразователем напряжения.
3 Недостатки системы асинхронного электропривода с преобразователем напряжения.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 3.6 Регулирование момента и скорости частотно – управляемых электроприводов
Общие сведения. Функциональная схема системы автоматического управления с ориентацией по вектору потокосцепления ротора. Функциональная схема системы автоматического управления с автономным инвертором тока. Функциональная схема системы автоматического управления с ориентацией по положению ротора.
Студент должен:
знать:
- назначение элементов и принцип работы функциональной схемы системы автоматического управления с ориентацией по вектору потокосцепления ротора;
- назначение элементов и принцип работы функциональной схемы системы автоматического управления с автономным инвертором тока;
- назначение элементов и принцип работы функциональной схемы системы автоматического управления с ориентацией по положению ротора.
Методические указания
Современные системы регулирования ча стотно-управляемых электроприводов выполняются, как правило, по принципу подчиненного регулирования переменных. Синтез систем автоматического управления указанного типа имеет ряд специфических особенностей, связанных со своеобразием АД и преобразователя частоты как объектов регулирования. На характеристики электропри вода существенное влияние оказывают электромагнитные переходные процессы в системе ПЧ — АД, пренебрежение которыми не только не позволяет получить высокие динамические показатели, но и вызывает серьезные затруднения в обеспечении устойчивости электропривода.
Основные трудности синтеза САУ дан ными электроприводами связаны в первую очередь с чрезвычайной сложностью АД как объекта регулирования. Как следует из рассмотрения структурных схем АД, он принципиально является многоканальным объектом регулирования с большим количеством нелинейных перекрестных связей между каналами. Кроме того, состояние АД определяется совокупным действием всех его фаз, причем управляющие воздействия (напряжения или токи) не являются постоянными величинами даже в установившихся режимах.
Как показывает опыт создания высококачественных САУ, синтез частотно-управляемых электроприводов традиционными способами, основанными на линеаризации дифференциальных уравнений объекта и применении частотных методов, оказывается чрезвычайно трудоемким и малоэффективным.
Указанные обстоятельства привели к то му, что в последнее время сформировался новый подход к синтезу систем автоматического управления АД. Он предполагает использование полных дифференциальных уравнений АД, полученных на основе теории обобщенной электрической машины. При этом большое значение имеет рациональный выбор переменных, относительно которых синтезируется САУ, и рациональное ориентирование координатной системы относительно выбранных переменных. Это дает возможность в ряде случаев существенно упростить задачу синтеза.
При синтезе САУ производится компен сация нелинейностей объекта и нейтрали зация внутренних связей, что позволяет при менить к преобразованной структуре методы подчиненного регулирования, хорошо зарекомендовавшие себя в электроприводах постоянного тока. При описании системы широко используется метод обобщенных векторов, с помощью которого удается в наиболее удобной форме представить результирующее влияние всех фаз АД на ее состояние.
В настоящее время разработано большое количество различных САУ асинхронными электроприводами. Разделяя их по способу ориентации координатной системы, в которой осуществляется регулирование векторов напряжения, тока и потокосцепления, можно отметить системы с ориентацией координатной системы по направлению вектора потокосцепления ротора и с ориентацией относительно положения ротора.
Вопросы для самоконтроля:
1 Какими особенностями характеризуется системы регулирования ча стотно-управляемых электроприводов?
2 Принцип построения САУ асинхронным электроприводом с автономным инвертором тока.
3 Принцип построения САУ асинхронным электроприводом с ориентацией по положению ротора.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
Тема 3.7 Автоматическое управление возбуждения синхронных двигателей
Общие сведения. Законы регулирования возбуждения. Технические данные возбудителей. Упрощенная принципиальная схема пуска синхронного двигателя. Функциональная схема системы регулирования возбуждения синхронного двигателя с автоматическим регулированием возбуждения типа ТЕ8. Функциональная схема системы подчиненного регулирования возбуждения синхронного двигателя
Студент должен:
знать:
- законы регулирования возбуждения ;
- технические данные возбудителей ;
- назначение элементов и принцип работы упрощенной принципиальной схемы пуска синхронного двигателя ;
- назначение элементов и принцип работы функциональной схемы системы регулирования возбуждения синхронного двигателя с автоматическим регулированием возбуждения типа ТЕ8
уметь:
- реализовывать законы регулирования возбуждения;
- объяснить назначение и взаимосвязь каждого элемента функциональной схемы системы подчиненного регулирования возбуждения синхронного двигателя .
Методические указания
Системы автоматического управления синхронными электроприводами должны обеспечить, с одной стороны, устойчивую работу электропривода, с другой — стабилизацию параметров питающей сети системы электроснабжения.
Кроме того, использование синхронных электроприводов для механизмов, работающих с резкоперемеыной нагрузкой, требует применения быстродействующей форсировки тока возбуждения СД, что улучшает технико-экономические показатели электроприводов, повышает устойчивость и перегрузочную способность двигателя и снижает его установленную мощность.
Все это определило использование в синхронных электроприводах быстродействующих возбудителей с автоматическим регулированием возбуждения (АРВ) в зависимости от требований электропривода и системы электроснабжения.
Устройства АРВ обеспечивают различные законы регулирования параметров синхронного электропривода и питающей сети в установившихся и переходных режимах работы. АРВ СД в установившихся режимах обусловлено требованиями системы электроснабжения, а именно ликвидацией колебаний напряжения сети и потребностью реактивной мощности. Основными требованиями регулирования в этом случае является качество регулирования, т. е. точность стабилизации регулируемого параметра и надежность работы. АРВ в динамических режимах определяет мгновенные значения регулируемых параметров в переходных процессах. Сюда относятся повышение динамической устойчивости электропривода и демпфирование качаний ротора при набросах и сбросах нагрузки в электроприводах, работающих с резкопеременной нагрузкой. Основным требованием к АРВ в этом случае является высокое быстродействие.
Автоматическое регулирование возбуждения в установившихся режимах работы обеспечивается по одному из следующих законов: постоянство cos j двигателя ( cos j д = const ); постоянство реактивной мощности, вырабатываемой СД ( Q = const );
постоянство напряжения, в узле нагрузки (в системе питания) ( U п = const); постоянство cos j п в узле нагрузки (в системе питания) ( cos j п = const).
При реализации требуемых законов управления некоторые регулируемые величины не измеряются непосредственно, а используются косвенные параметры. Параметрами регулирования возбуждения СД являются: полный ток статора, активная и реактивная составляющие тока статора, производные от тока статора, фаза тока статора (угол j ), напряжение на шинах питания СД, реактивная мощность двигателя, угол мощности двигателя (угол q ) и его производные.
Все перечисленные законы регулирования возбуждения могут использоваться для электроприводов с различными видами нагрузки при условии, если пики нагрузки не превышают максимального момента СД. При пиках моментов нагрузки, превышающих Мтах двигателя, используются первые два закона управления. Закон регулирования cos j д = const целесообразен для электроприводов большой и средней мощности с плавно изменяющейся нагрузкой при незначительных колебаниях напряжения питающей сети.
В возбудителях ТЕ8-320-4 предусмотрены ручной и аварийный режимы управления током возбуждения, а в возбудителях серии ТЕ8-320-5 — еще и автоматический режим.
При работе в режиме ручного управления возбудитель обеспечивает: пуск синхронного двигателя с автоматической подачей возбуждения с контролем тока статора; плавную регулировку тока возбуждения от 0,3 до 1,4 номинального с возможностью подстройки граничных пределов; ограничение напряжения возбуждения по минимуму в пределах О—0,5 номинального значения; ограничение тока возбуждения по максимуму в пределах 0,8—1,75 номинального значения; защиту обмотки ротора от длительной перегрузки по току; форсировку по напряжению, равную 1,75 номинального значения при номинальном напряжении сети, питающей возбудитель, причем форсировка возбуждения срабатывает при падении напряжения сети статора на 15—20 % от номинального значения; форсированное гашение поля ротора при отключении двигателя, а также при перерывах питания двигателя и наличии дополнительного сигнала на гашение поля.
Вопросы для самоконтроля:
1Назначение автоматического регулирования возбуждения СД.
2 По каким законам обеспечивается автоматического регулирования возбуждения СД?
3 Принцип действия упрощенной принципиальной схемы пуска СД.
4 Назначение элементов функциональной схемы системы регулирования возбуждения СД с АВР типа ТЕ8.
Литература: [ 1 ] ; [ 2 ] ; [ 4 ] .
3 Перечень лабораторных и практических работ
| № темы |
Номер и наименование занятия |
| 1.5 |
1 Изучение условной схемы мостового инвертора и построение диаграмм выходных напряжений при различных углах проводимости тиристоров. |
| 1.7 |
2 Изучение принципов управления ПЧН. |
| 2.1 |
3 Изучение системы «тиристорный преобразователь – двигатель». |
| 2.2 |
4 Изучение структурных схем систем электропривода |
| 3.3 |
5 Изучение устройства и принципа работы функциональной схемы электроприводов серий КТЭУ, ЭКТ, КТЭ, ЭТ, ЭТУ, ЭТРП. |
| 3.7 |
6 Изучение устройства и принципа работы функциональной схемы системы подчиненного регулирования возбуждения синхронного двигателя |
4 Задания для контрольной работы
Контрольная работа – это отчет студента заочника о проделанной работе по изучению программы дисциплины «Системы автоматизированного управления электроприводами».
Учебный материал состоит из трех разделов. Студенту необходимо выполнить одну контрольную работу в срок, установленный учебным планом.
Контрольная работа №1 включает в себя 3 задания. Номер Вашего варианта совпадает с номером в учебном журнале .
Задание №1. Принцип разработки схем управления двигателями.
Разработать схему управления короткозамкнутым асинхронным двигателем.
| Номер варианта |
Условия разработки схем |
| 1 |
При работе двигателя горит красная сигнальная лампа, при останове зеленая. |
| 2 |
Пуск двигателя осуществляется от импульса определенной продолжительности. |
| 3 |
Останов двигателя осуществляется от импульса определенной продолжительности. |
| 4 |
Нажатием на кнопку «Пуск» включается двигатель и зажигается красная сигнальная лампа. Через время красная сигнальная лампа погасает и зажигается зеленая. Нажатием на кнопку «Стоп» все отключается. |
| 5 |
Нажатием на кнопку «Пуск» зажигается сигнальная лампа и включается двигатель, при отпускании кнопки «Пуск» лампа гаснет, двигатель продолжает работать. Останов двигателя осуществляется нажатием кнопки «Стоп». |
| 6 |
Нажатием на кнопку «Пуск» включается двигатель, при отпускании - зажигается лампа. Двигатель продолжает работать. Кнопкой «Стоп» все отключается. |
| 7 |
Двигатель включается и отключается кнопками «Пуск» и «Стоп». Пока нажата кнопка «Стоп» горит красная сигнальная лампа. |
| 8 |
Нажатием на кнопку «Пуск» включается двигатель, зажигается сигнальная лампа и звенит звонок. Через некоторое время звонок отключается. Нажатием на кнопку «Стоп» двигатель отключается, сигнальная лампа гаснет. |
| 9 |
Нажатием на кнопку «Пуск» включается двигатель, |
| 10 |
В схеме управления двумя двигателями второй можно |
| 11 |
В схеме управления двумя двигателями второй может работать, если работает первый. Сигнальная лампа горит, если оба двигателя работают или оба не работают. |
| 12 |
Нажатием на кнопку «Пуск» включается первый двигатель и через время - второй. Кнопка «Стоп» для каждого своя. Сигнальная лампа горит, если работает только второй двигатель. |
| 13 |
Пуск и останов двигателя осуществляются кнопками
S
В1 |
| 14 |
Второй двигатель можно включить, если работает первый. Через некоторое время после включения второго двигателя оба двигателя отключаются. Если работает только первый двигатель - горит красная сигнальная лампа(НL1), только второй - зеленая(НL2), если работают оба - белая(НL3). Второй двигатель можно остановить, если работает первый. Если работают оба двигателя, горит красная сигнальная лампа, оба не работают - зеленая. |
| 15 |
Нажатием на кнопку «Пуск» зажигается сигнальная |
| 16 |
Первый двигатель включается нажатием на кнопку «Пуск», а второй - при ее отпускании. Оба двигателя отключаются нажатием на кнопку «Стоп». |
| 17 |
Нажатием на кнопку «Пуск» в первый раз включается |
| 18 |
Кнопками ЗВ1и ЗВ2 включаются соответственно первый и второй двигатель. Нажатием на кнопку ЗВЗ в первый раз отключается первый двигатель, во второй раз – второй двигатель. |
| 19 |
Нажатием на кнопку «Пуск» включается двигатель и зажигается красная сигнальная лампа. Через время красная сигнальная лампа погасает и зажигается зеленая. Нажатием на кнопку «Стоп» все отключается. |
| 20 |
Нажатием на кнопку «Пуск» включается двигатель и зажигается сигнальная лампа. Нажатие на кнопку «Стоп» первый раз отключает двигатель, во второй раз - гаснет лампа. |
| 21 |
Второй двигатель можно включить, если работает первый и подольше подержать кнопку «Пуск». |
| 22 |
Составить схему управления реверсивным асинхронным двигателем, причем, при работе «Вперед» горит сигнальная лампа, при работе «Назад» звенит звонок. |
| 23 |
Составить схему управления реверсивным асинхронным двигателем, причем включение «Назад» может осуществляться кнопкой «Назад», а также возможно через некоторое время после замыкания контактов концевого выключателя. Сигнальная лампа горит в паузе между движением вперед и назад. |
| 24 |
Нажатием на кнопку «Пуск» включается первый двигатель и через время - второй. Кнопка «Стоп» для каждого своя. Сигнальная лампа горит, если работает только второй двигатель. |
| 25 |
Составить схему управления реверсивным столом обрабатывающего станка с применением концевых выключателей. Вначале хода вперед некоторое время звенит звонок, вначале хода назад горит сигнальная лампа / |
| 26 |
Составить схему управления реверсивным асинхронным двигателем с концевыми выключателями и одним реле времени по программе: « вперед - пауза - назад - пауза - вперед и т.д.». |
| 27 |
Составить схему управления с использованием ключа управления, причем, в автоматическом режиме «А» сигнал на включение двигателя подает промежуточное реле КL1, на отключение - КL2 (по условиям технологического процесса). В ручном режиме «Р» пуск и останов осуществляется с помощью кнопок управления. |
Задание №2. Замкнутые системы управления электроприводами.
Подробно описать ответ на вопрос задания.
| Номер варианта |
Задание |
| 1. |
Какие виды обратных связей применяются в замкнутых схемах электропривода? |
| 2. |
Какие отличительные признаки имеют схемы управления с общим усилителем? |
| 3. |
Что такое технический и симметричный оптимумы настройки систем с подчиненным регулированием координат? |
| 4. |
Какую структуру силовой части имеет большинство замкнутых электроприводов? |
| 5. |
Какие отличительные признаки имеют схемы управления, по строенные по принципу подчиненного регулирования координат? |
| 6. |
Какие способы управления применяются в асинхронных элек троприводах с использованием преобразователей частоты? |
| 7. |
Какие виды регулируемых электроприводов с синхронными двигателями вы знаете? |
| 8. |
С какой целью осуществляется автоматическое регулирование тока возбуждения синхронных двигателей? |
| 9. |
Какой электропривод называется следящим? |
| 10. |
Что называется электроприводом с программным управлением? |
| 11. |
В чем состоят особенности электропривода с ЧПУ? |
| 12. |
Что называется адаптивным электроприводом? |
| 13. |
Какой электропривод называется комплектным? |
| 14. |
Какие отличительные признаки имеют схемы управления, по строенные по принципу подчиненного регулирования координат? |
| 15. |
Какой электропривод называется интегрированным? |
| 16. |
В каких случаях требуется создание замкнутых систем электропривода? |
| 17. |
Каковы негативные последствия регулирования скорости напря жением в цепи статора при длительном режиме работы? |
| 18. |
Какие виды обратных связей применяются в замкнутых схемах электропривода? |
| 19. |
По какой причине частотное регулирование скорости АД являет ся наиболее экономичным? |
| 20. |
Должно ли регулироваться напряжение при регулировании час тоты и почему? |
| 21. |
Какие, ограничения имеются при регулировании частоты АД сверх номинального значения? |
| 22. |
Какие типы преобразователей частоты для питания АД вы знае те? Приведите формы напряжения на двигателе. |
| 23. |
Какие способы коммутации тиристоров знаете? |
| 24. |
Какие отличительные признаки имеют схемы управления, по строенные по принципу подчиненного регулирования координат? |
| 25. |
Какими способами осуществляется регулирование напряжения статических преобразователей? |
| 26. |
Возможно ли рекуперативное торможение в системе частотного электропривода? Что для этого нужно в системе АИН-АД и системе НПЧ-АД? |
| 27. |
Возможно ли получение частоты питания АД выше частоты сети в системе НПЧ-АД? |
| 28. |
Сравните значение коэффициента мощности для частотного электропривода с АД при питании от автономного инвертора напряжения и для АД при питании от сети (при одинаковых значениях частоты и нагрузки). |
Задание № 3. Замкнутые системы управления электроприводами.
Подробно описать ответ на вопрос задания.
| Номер варианта |
Задание |
| 1. |
Для вентильного преобразователя с однофазной двухполупериодной схемой выпрямления начертите диаграммы ЭДС и объясните принцип вертикального управления. |
| 2. |
Напишите и объясните зависимость угла управления тиристорами от напряжения управления при различных формах опорного напряжения. |
| 3. |
Почему при косинусоидальном опорном напряжении регулировочная характеристика преобразователя оказывается линейной? |
| 4. |
Начертите функциональную схему СИФУ с вертикальным управлением и объясните её работу. |
| 5. |
Привести регулировочную характеристику СИФУ и регулировочную характеристику вентильного преобразователя, дать пояснения. |
| 6. |
Начертите и объясните функциональную схему тиристорного электропривода постоянного тока. |
| 7. |
Напишите условие выбора сглаживающего дросселя для обеспечения непрерывного тока. Почему включение дросселя последовательно с якорем двигателя позволяет уменьшить диапазон нагрузок, при которых ток в цепи выпрямленного тока прерывистый? |
| 8. |
Начертите функциональную схему СИФУ с вертикальным управлением и объясните её работу. |
| 9. |
Напишите и объясните условия выбора питающего трансформатора для тиристорного электропривода . |
| 10. |
Напишите и объясните условие выбора реактора для сглаживания пульсаций выпрямленного тока. |
| 11. |
В каких случаях и почему питание тиристорных преобразователей может осуществляться без трансформатора. Приведите соответствующие схемы. |
| 12. |
Начертите и объясните функциональную схему тиристорного электропривода постоянного тока. |
| 13. |
Назовите законы частотного регулирования. Приведите механические характеристики при различных законах регулирования. |
| 14. |
Каким должно быть напряжение на статоре двигателя при регулировании скорости вверх от номинальной? Как при этом изменяется перегрузочная способность? |
| 15. |
Начертите и объясните схему и принцип работы ПЧН. Укажите |
| 16. |
Каким образом осуществляется регулирование частоты в ПЧН? Объясните зависимость регулируемой частоты от Т var ,от длительности паузы и, от порядка включения тиристоров? |
| 17. |
Начертите и объясните схему вентильного электропривода с трехфазной мостовой схемой выпрямления с питающим трансформатором и сглаживающим дросселем. |
| 18. |
Почему при частотном регулировании скорости необходимо изменять подводимое к двигателю напряжение? |
| 19. |
Каким образом в ПЧН регулируется выходное напряжение? Перечислите недостатки ПЧН. |
| 20. |
Начертите функциональную схему СИФУ с вертикальным управлением и объясните её работу. |
| 21. |
Объясните принцип формирования напряжения прямоугольно-ступенчатой формы в ПЧН. Какие тиристоры открыты в каждом из указанных на диаграмме интервалов? Назовите угол (в электрических градусах) между импульсами, открывающими тиристоры. |
| 22. |
Начертите схему и объясните работу схемы автономного инвертора. |
| 23. |
Начертите и объясните работу замкнутой схемы частотного регулирования. |
| 24. |
Назначение и принцип действия инверторов напряжения и инверторов тока. |
| 25. |
Начертите и объясните функциональную схему тиристорного электропривода постоянного тока. |
| 26. |
Методы регулирования напряжения на выходе преобразователя частоты. |
| 27. |
Принципы построения систем управления ПЧН. |
Вопросы для зачета
| Тема 1.1. Преобразователи электрической энергии |
|
| 1 |
Управляемые выпрямители. Динамические свойства вентильного преобразователя. |
| 2 |
Системы импульсно - фазового управления тиристорами |
| 3 |
Реверсивные вентильные преобразователи напряжения |
| 4 |
Широтно-импульсные преобразователи постоянного тока |
| 5 |
Преобразователи частоты для управления асинхронными двигателями. Принцип работы автономного инвертора |
| 6 |
Инверторы напряжения и инверторы тока |
| 7 |
Преобразователи частоты с непосредственной связью |
| 8 |
Выбор трансформатора для тиристорного привода |
| 9 |
Выбор сглаживающего дросселя |
| Тема 1.2. Замкнутые системы управления электропривода |
|
| 10 |
Схемы замкнутых структур электропривода. Технические средства замкнутых схем управления ЭП |
| 11 |
Аналоговые элементы и устройства управления ЭП. Дискретные элементы и устройства управления ЭП. |
| 12 |
Датчики скорости и положения, применяющиеся в замкнутых схемах управления. Микропроцессорные средства управления ЭП |
| 13 |
Замкнутая система П-Д с отрицательной обратной связью по скорости |
| 14 |
Замкнутая система П-Д с отрицательной обратной связью по напряжению |
| 15 |
Замкнутая система П-Д с положительной обратной связью по току якоря |
| 16 |
Замкнутые системы стабилизации скорости и момента электропривода постоянного тока с промежуточным усилителем |
| 17 |
Переходные процессы в системе П-Д. Формирование переходных процессов |
| 18 |
Влияние вентильного электропривода постоянного тока на сети электроснабжения и способы снижения этого влияния |
| 19 |
Замкнутая схема управления асинхронного ЭП, выполненного по системе тиристорный регулятор напряжения-двигатель. Замкнутый ЭП с частотным управлением АД |
| 20 |
Схемы автоматического пуска синхронных двигателей. Автоматическое регулирование возбуждения (АРВ) |
Список литературы
Основной
1. Справочник по автоматизированному электроприводу/ Под ред. В.А.Елисеева и А.В.Шинянского- М.: Энергоатомиздат,1983.
2. Зимин Е.Н., Яковлев В.И. Автоматическое управление электроприводами: Учеб. пособие для студентов вузов. -М.: Высшая школа, 1979.
3. Комплектные тиристорные электроприводы: Справочник/ И.Х.Евзеров, А.С. Горобец, Б.И.Мошкович и др.; Под ред. Канд. Техн. Наук В.И.Перельмутера. - М.: Энергоатомиздат,1988
4. Системы автоматизированного управления электроприводами: Учеб.пособие /Г.И.Гульков, Ю.Н.Петренко, Е.П. Раткевич, О.Л.Симоненкова; Под общ.ред.Ю.Н.Петренко. – Мн.: Новое знание, 2004.
Дополнительной
1. Правила устройства электроустановок. - М.: Энергоатомиздат, 2003.
2. Чиликин М.Г., Сандлер А.С. Общий курс электропривода. М.:Энергоиздат, 1981.
3. Москаленко В.В Электрический привод: Учеб, пособие для студ. обра зовательных учреждении сред. проф. образования. - М.: Мастерство: Высшая школа, 2000