Методические указания рассмотрены и рекомендованы к изданию методическим семинаром кафедры автоматизации и роботизации в машиностроении мсф «15» мая 2010 г
СОДЕРЖАНИЕ: «Металлообрабатывающие станки и комплексы» и по направлению 150900 «Технология, оборудование и автоматизация машиностроительных производств», магистерской программы «Динамика и акустика станочных систем» по курсу «Автоматизированные приводы»Федеральное агентство по образованию
Государственное образовательное учреждение высшего профессионального образования
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ
ТОМСКИЙ ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
»
Утверждаю
Декан МСФ
Р.И. Дедюх
« » 2010 г.
Рег.№169 от 25.05.2010г.
Д.П. Крауиньш
Автоматизированные приводы
Часть 1
Методические указания к выполнению лабораторных работ по курсу «Автоматизированный электропривод» для студентов IV..V курсов, обучающихся по специальности 151002 «Металлообрабатывающие станки и комплексы» и по направлению 150900 «Технология, оборудование и автоматизация машиностроительных производств», магистерской программы «Динамика и акустика станочных систем» по курсу «Автоматизированные приводы»
Издательство
Томского политехнического университета
2010
УДК 62-8(076)
ББК 31.291я73
К787
Крауиньш Д.П.
К787 Автоматизированные приводы: Методические указания к выполнению лабораторных работ по курсу «Автоматизированный электропривод» для студентов IV…V курса, обучающихся по специальности 151002 «Металлообрабатывающие станки и комплексы» и по направлению 150900 «Технология, оборудование и автоматизация машиностроительных производств», магистерской программы «Динамика и акустика станочных систем» по курсу «Автоматизированные приводы». Часть 1 / Д.П. Крауиньш. – Томск: Изд-во Томского политехнического университета, 2010. – 15 с.
УДК 62-8(076)
ББК 31.291я73
Методические указания рассмотрены и рекомендованы
к изданию методическим семинаром кафедры
автоматизации и роботизации в машиностроении МСФ «15
» мая
2010 г.
Зав. кафедрой АРМ
кандидат технических наук __________С.Е. Буханченко
Председатель учебно-методической
комиссии __________ М.Г. Гольдшмидт
Рецензент
Кандидат технических наук, доцент кафедры АРМ Смайлов С.А.
© ГОУ ВПО «Национальный исследовательский
Томский политехнический университет», 2010
![]() © Крауиньш Д.П., 2010
© Крауиньш Д.П., 2010
© Оформление. Издательство Томского
политехнического университета, 2010
Оглавление
Лабораторная работа №3. «Чувствительные элементы автоматизированных приводов». 12
Лабораторная работа №1. « Исследование быстрых периодических движений механизмов с помощью контрольно-измерительных устройств».
Цель работы:
1. Ознакомиться с научной аппаратурой для проведения различных исследований.
2. Ознакомиться с необходимыми для автоматизации подготовительными материалами - циклограммами, тарировочными графиками и др.
Теоретическая часть:
Стробоскопический эффект 1) восприятие в условиях прерывистого наблюдения движущегося предмета неподвижным; 2) восприятие быстрой смены изображений отдельных моментов движения тела как непрерывного его движения. Стробоскопический эффект основан на инерции зрения, т.е. сохранения в сознании наблюдателя воспринятого зрительного образа некоторое (малое, обычно около 0,1с) время после того, как вызвавшая образ картина исчезла.
|
Рис. 1.1 Рис. 1.2 |


Принцип действия стробоскопического прибора (рис. 1.1) заключается в том, что совершающее периодическое движение тело (рис. 1.2) освещается импульсами света или делается видимым в отдельные, очень малые по сравнению с периодом колебаний (вращения) промежутки времени. При этом если частота f следования импульсов света совпадает с частотой f1 колебаний тела, то оно кажется движущимся с частотой F=f – f1 . Если частота импульсов света кратная по отношению к частоте колебаний тела, то количество «видимых» тел зрительно кратно возрастает (см. рис. 1.3 и рис. 1.4).
Главное достоинство стробоскопического прибора – возможность измерять угловые скорости объекта без механического контакта с ним.
|
Рис. 1.3 |
|
Рис. 1.4 |


Задание:
|
|
|


| Рис.1.5 |
1. Используя строботахометр типа «ТСт100» и цифровой фототахометр типа «ДТ-2234А» произвести калибровку и настройку различных (визуальных – рис.1.5) элементов задания скорости привода главного движения металлорежущего станка (универсального или станка с ЧПУ).
2. Построить диаграммы (графики) зависимости частоты следования импульсов источника света от «физических» оцифрованных отметок визуализатора (вариатора, потенциометра).
3. Сделать необходимые выводы:
3.1. О работоспособности (правильности настройки) исследуемого привода.
3.2. Каким способом (какими средствами) еще можно контролировать скорость и правильность настройки привода?
3.3. Не изменяя электромеханику органов управления станка (рис.5) предложите техническое устройство, позволяющее изменять скорость привода главного движения по управляющей программе.
Экспериментальная часть:
Контролируем №__ потенциометра токарного станка с ЧПУ ТПК-125.
| Отметки на станке |
На тСт-100 |
Цифровой фототахометр |
Строим графики зависимости частоты следования импульсов источника света (строботахометра) и цифрового фототахометра от меток потенциометра.
Перевести положение физических отметок в угловые меры и построить график зависимости частоты вращения шпинделя от углового положения ручки потенциометра – регулировочная характеристика.
Выполняем пункт 3 задания.
Отчет должен содержать:
1. Цель работы.
2. Описание работы.
3. Характеристики, полученные в результате выполнения лабораторной работы.
4. Схему устройства автоматизации с необходимыми пояснениями.
5. Выводы по работе.
Лабораторная работа №2. « Исследование влияния прогрева двигателя на частоту вращения привода главного движения станка ТПК-125».
Цель работы: Определение постоянной времени прогрева двигателя станка при заданном режиме работы (например S 1 ) двигателя.
Инструменты и принадлежности:
· Станок ТПК-125
· Цифровой фототахометр типа «ДТ-2234А»
· Инфракрасный термометр типа « Infrared thermometer Center 350»
· Секундомер (часа)
Порядок работы: поясняется преподавателем
Теоретическая часть:
1. Режимы работы
1.1. Продолжительный режим работы S 1 (рис. 2.1)
Работа машины при неизменной нагрузке Р и потерях Р v достаточно длительное время для достижения установившейся (неизменной) температуры всех её частей (max ).
1.2. Кратковременный режим работы S 2 (рис. 2.2)
Работа машины при неизменной нагрузке Р в течение времени tp , недостаточного для достижения всеми частями машины установившейся температуры, после чего следует остановка машины на время, достаточное для охлаждения машины до температуры, не более чем на 2°С превышающей температуру окружающей среды.
Мощность двигателя в кратковременном режиме S 2 ориентировочно можно определить по формуле:
 ;
;
где: P S1 – номинальная мощность двигателя в длительном режиме S 1;
Т – постоянная времени нагрева двигателя.
При этом необходимо соблюдать условие:
 .
.
1.3. Периодический повторно-кратковременный режим работы S 3 (рис. 2.3)
Режим S 3 – последовательность идентичных циклов работы, каждый из которых включает время работы при неизменной нагрузке, за которое машина не нагревается до установившейся температуры, и время стоянки, за которое машина не охлаждается до температуры окружающей среды. При этом потери при пуске не оказывают влияния на температуру частей машины.
Мощность двигателя в повторно-кратковременном режиме ориентировочно можно определить по формуле:
 ;
;
где: 0 – коэффициент уменьшения теплоотдачи при стоянке двигателя;
К 0 – отношение потерь холостого хода к потерям при нагрузке;
ПВ – относительная продолжительность включения, %.
1.4. Периодический повторно-кратковременный режим с влиянием пусковых процессов S 4 (рис. 2.4)
Последовательность идентичных режимов работы, каждый из которых включает время пуска t D время работы при постоянной нагрузке t P , за которое двигатель не нагревается до установившейся температуры, и время стоянки t R , за которое двигатель не охлаждается до температуры окружающей среды.
Допустимое число пусков в час двигателя, имеющего динамический момент инерции ротора J M , кг·м2 , работающего в режиме S 4 со статической нагрузкой на валу, определяемой мощностью Р 2 , кВт, и динамической нагрузкой, определяемой динамическим моментом инерции приводимой машины J EXT , кг·м2 , ориентировочно можно определить по формулам:
 ;
;  ;
;
 ;
;
 ;
; 
где: Z0 – допустимое число пусков в час двигателя без статической и динамической нагрузки на валу;
mСТ.СР – относительное значение среднего за время разгона статического момента на валу двигателя;
mД.СР – относительное значение среднего за время разгона момента вращения двигателя.
Время разгона двигателя tD , с, до номинальной скорости вращения определяется по формуле:
 ;
;
1.5. Периодический повторно-кратковременный режим с влиянием пусковых процессов и электрическим торможением S5 (рис. 2.5)
Режим, включающий в себя те же элементы, что и S 4 с дополнительным периодом tF быстрого электрического торможения.
1.6. Перемежающийся режим работы S 6 (рис. 2.6)
Последовательность идентичных циклов, каждый из которых включает время работы tP с постоянной нагрузкой Р и время работы на холостом ходу tV , причём длительность этих периодов такова, что температура двигателя не достигает установившегося значения. Мощность двигателя, работающего в режиме S6, ориентировочно можно определить по формуле:
 ;
;
При этом необходимо соблюдать условие:
 ;
;
1.7. Периодический перемежающийся режим с влиянием пусковых процессов и электрическим торможением S 7 (рис. 2.7)
Последовательность идентичных циклов, каждый из которых включает достаточно длительное время пуска t D , время работы t P с постоянной нагрузкой и быстрое электрическое торможение t F . Так как режим не содержит пауз, то для него ПВ = 100%.
Если электрическое торможение осуществляется реверсированием, то следует иметь в виду, что один реверс в тепловом отношении эквивалентен трем пускам.
1.8. Периодический перемежающийся режим с периодически изменяющейся частотой вращения S 8 (рис. 2.8)
Это последовательность идентичных циклов, каждый из которых включает время разгона tD , работу t P1 с неизменной нагрузкой и частотой вращения n1 , электрическое торможение, работу t P2 при другой частоте вращения n2 и нагрузке, электрическое торможение и т. д.
| Рис. 1. Режимы работы |
|
|
|
|
| Рис. 2.1. Режим S1 |
Рис. 2.2. Режим S 2 |
|
|
|
| Рис. 2.3. Режим S3 |
Рис. 2.4. Режим S4 |
|
|
|
| Рис. 2.5. Режим S5 |
Рис. 2.6. Режим S6 |
|
|
|
| Рис. 2.7 Режим S7 |
Рис. 2.8 Режим S8 |
|
Рис. 2.9 |
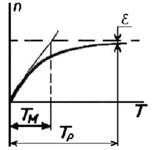
Принято считать, что технически оптимальным является процесса, когда для заданного
выполняется условие ![]() (см. рис. 2.9)
(см. рис. 2.9)
Время регулирования.
Временем регулирования ![]() называется время, в течение которого, начиная с момента приложения воздействия на систему, отклонения значений регулируемой величины от ее установившегося значения будут меньше наперед заданного значения
. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
называется время, в течение которого, начиная с момента приложения воздействия на систему, отклонения значений регулируемой величины от ее установившегося значения будут меньше наперед заданного значения
. Таким образом, время регулирования определяет длительность (быстродействие) переходного процесса.
Отчет должен содержать:
1. Цель работы.
2. Описание работы.
3. Схемы, рисунки и характеристики, полученные в результате выполнения лабораторной работы.
4. Некоторое заключение о работоспособности оборудования.
5. Выводы по работе.
Лабораторная работа №3. «Чувствительные элементы автоматизированных приводов»
Цель работы:
Изучение конструкций и принципов работы датчиков, используемых в различных системах управления автоматизированного привода.
Теоретическая часть:
Датчики (чувствительные элементы) – устройства, воспринимающие изменение контролируемой величины и преобразующие это изменение в выходной сигнал, удобный для дальнейшей обработки в дистанционной передачи.
По характеру получения – сигнала от измеряемой величины датчики разделяют на параметрические , в которых изменение измеряемой величины вызывает изменение какого – либо параметра (например – сопротивления, индуктивности и т.д.) и генераторные , у которых изменение измеряемой величины вызывает генерацию сигнала (появление Э.Д.С., оттока и т.д.).
По функциональной зависимости выходного сигнала от входного, так называемой статической характеристике различают датчики:
– пропорциональные , у которых сигнал на выходе пропорционален измеряемой величине;
– релейные , в которых сигнал на выходе изменяется скачкообразно;
– нелинейные , у которых сигнал на выходе нелинейно зависит от сигнала на входе;
– импульсные , в которых изменение входной величины вызывает появление сигналов (импульсов), сила которых пропорционально;
По виду преобразования сигналов датчики могут быть:
– электроконтактные , где механическая сила преобразуется в электрический сигнал;
– индуктивные , у которых изменение магнитной проницаемости преобразуется в изменение индуктивности;
– фотоэлектрические , в которых световой сигнал преобразуется в электрический;
–тензометрические , в которых механическая сила приводит к изменению сопротивления;
– гидравлические , в которых механические силы преобразуются в электрический сигнал, и т.д.
По назначению датчики можно разделить на:
– путевые и положения (линейного или углового положения);
– скорости;
– ускорения;
– силы (давления) и т.д.
Порядок работы:
– ознакомиться с конкретной конструкцией датчика;
– нарисовать принципиальную схему датчика и описать принцип его работы;
– определить типы датчика (по всем классификационным признакам);
– построить статическую характеристику датчика (теоретическую);
– указать область применения исследуемого датчика.
Отчет должен содержать:
1. Цель работы.
2. Описание каждого датчика.
3. Тип каждого датчика согласно классификации.
4. Теоретическую и (или) другую характеристики рассматриваемых (исследуемых) датчиков.
5. Область применения каждого из рассматриваемых датчиков.
6. Выводы по работе.
ЛИТЕРАТУРА
1. Ан Ж. и др. Датчики измерительных систем: В 2-х кн. – М.: Мир, 1992.
2. Винарский М.С., Лурье М.В. Планирование эксперимента в технологических исследованиях. – Киев: Техника, 1975. – 198с.
3. Головенков С.Н., Сироткин С.В. Основы автоматики и автоматического регулирования станков с программным управлением. Учеб. Для машиностроительных техникумов. М. Машиностроение. 1988. – 288 с.
4. Жданкин В. Ультразвуковые датчики для систем управления. / Журнал «Современные технологии автоматизации» №4 2003. – с.48…62.
5. Лившиц В.И. Измерительные преобразователи перемещений в станках с ЧПУ. Учеб. Пособие. Томск, Из-во ТПИ, 1980. – 88 с.
6. Миловзоров В.П. Элементы информационных систем. – М.: Высш. шк., 1989.
7. Мозоляк Е. Индуктивные датчики положения фирмы «Pepperl+Fuchs». / Журнал «Современные технологии автоматизации» №3 2003. – с.6…20.
8. Пустыльник Е.И. Статические методы анализа и обработки наблюдений. – М.: Наука, 1968. – 288с.
9. Терган В.С. Основы автоматизации производственных процессов в приборостроении. Учебн. М.: Высш. Школа. 1978. – 223 с.
10. Физический энциклопедический словарь/Гл.ред. А.М. Прохоров. Ред.Кол. Д.М. Алексеев, А.М. Бонч-Бруевич, А.С. Боровик-Романов и др. – М.: Сов.энциклопедия, 1983. – 928с., ил.
Учебное издание
Крауиньш Дмитрий Петрович
Автоматизированные приводы
Часть 1
Методические указания к выполнению лабораторных работ
по курсу «Автоматизированный электропривод» для студентов IV…V курсов, обучающихся по специальности 151002 «Металлообрабатывающие станки и комплексы» и по направлению 150900 «Технология, оборудование и автоматизация машиностроительных производств», магистерской программы «Динамика и акустика станочных систем» по курсу «Автоматизированные приводы»
Отпечатано в Издательстве ТПУ в полном соответствии
с качеством предоставленного оригинал-макета
| Подписано к печати 05.11.2010. Формат 60х84/16. Бумага «Снегурочка». Печать XEROX. Усл.печ.л. 9,01. Уч.-изд.л. 8,16. Заказ . Тираж 100 экз. |
||
|
|
Национальный исследовательский Томский политехнический университет Система менеджмента качества Томского политехнического университета сертифицирована NATIONAL QUALITY ASSURANCE по стандарту ISO 9001:2008 |
|
|
Тел./факс: 8(3822)56-35-35, www.tpu.ru |
||
