Микропроцессорные системы: система ДЦ-МПК, система Юг
СОДЕРЖАНИЕ: Система Юг - распределенные контролируемые пункты, телемеханический контроль состояния технологических объектов. Система диспетчерской централизации на основе микро-ЭВМ и программируемых контроллеров (ДЦ-МПК), адаптирована к условиям метрополитенов.МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ:
СИСТЕМА ДЦ-МПК, СИСТЕМА «ЮГ»
1. Система «Юг» с распределенными контролируемыми пунктами
Первый вариант системы «Юг» принят в постоянную эксплуатацию на участках Батайск — Староминская — Тимашевская Северо-Кавказской железной дороги. В РГУ ПС разработаны программно-аппаратные решения на основе современной технической базы. Полностью выполнены требования ОСТ 32.111-98 и ОСТ 32.112—98, нормирующих параметры современных систем ДЦ.
Комплекс ДЦ-Юг с распределенными контролируемыми пунктами (РКП) введен в эксплуатацию на участке Краснодар — Тихорецкая Северо-Кавказской железной дороги.
Использован практический опыт внедрения линейных пунктов управления (ЛПУ) на 60 станциях в увязке с ЭЦ-4, ЭЦ-9, МРЦ-12, МРЦ-13. Выполнен переход на новые технические средства центрального поста управления (ЦПУ) на базе IBMPC индустриального исполнения и жидкокристаллических мониторов, расширен состав отображаемых данных (результаты диагностирования технических средств, сигналы от перегретых букс — аппаратура ПОНАБ, состояние переездов и др.), сформирована база приказов ДНЦ и ТРА станций, инструкций ДНЦ, подготовлены программные средства взаимодействия с АСОУП. Центральный пункт управления функционирует в операционной системе реального времени QNX с использованием технологии INTRANET, файлов HTML, реляционных баз данных формата SQL.
Информационные функции системы:
телемеханический контроль состояния технологических объектов (рельсовых цепей, стрелок, сигналов, переездов, устройств обнаружения перегретых букс и т.д.);
контроль состояния устанавливаемых и установленных маршрутов;
диагностирование собственных средств ДЦ;
контроль исправности устройств СЦБ;
ведение динамической поездной модели, контроль поездного положения на участке, подвижных единиц на участке с учетом номеров и индексов поездов;
регистрация, отображение, при необходимости, печать графика исполненного движения с приложениями;
ведение баз данных по поездам и обеспечение простого доступа к ним;
регистрация «окон», предупреждений и приказов диспетчера;
связь с АСОУП и информационными системами верхнего уровня ДАДЦУ (Дорожный автоматизированный диспетчерский центр управления);
протоколирование работы системы.
Управляющие функции системы:
установка, отмена поездных и маневровых маршрутов;
индивидуальное управление стрелками и сигналами;
перевод станций на резервное, сезонное, диспетчерское управление, групп стрелок на местное управление;
исключение (отмена исключения) перевода стрелок;
искусственная разделка стрелочных секций после полного замыкания маршрута;
управление средствами акустической и радиосвязи (включение/ выключение радио- и громкоговорящей связи, вызов к телефону, акустический вызов и т.д.);
управление режимами работы сигналов «День»/ «Ночь»;
накопление команд по заданию маршрутов в основном режиме функционирования с реализацией логики маршрутного набора и блокированием некорректных команд.
В состав аппаратуры центрального пункта управления (ПУ) входят IBM-совместные промышленные компьютеры, имеющие следующие технические характеристики:
Процессор.......................................... …………..PentiumII
Тактовая частота, МГц, не менее……………..………..233
Объем оперативной памяти, Мбайт, не менее………..32
Емкость жесткого диска, G байт, не менее……..……..1
Видеоадаптер……………………………………….…..S3
Сетевойадаптер……………………...Ethernet-10 Base T
В состав аппаратных средств ПУ входят также 21- и 14-дюймовые мониторы, модемы, лазерные и цветные струйные принтеры, сервер.
Круглосуточный режим работы аппаратных средств ПУ обеспечивается источниками бесперебойного питания, а также системой резервирования энергоснабжения, используемой на железнодорожном транспорте.
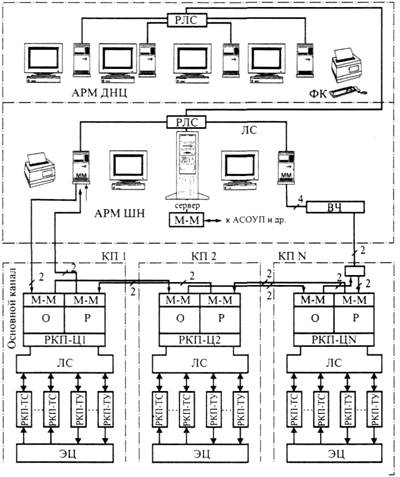
Состав и структура технических средств ДЦ-ЮГ приведены на рис. 1.
Условные обозначения элементов структурной схемы следующие:
АРМ ДНЦ — автоматизированное рабочее место поездного диспетчера; ФК — функциональная клавиатура, обеспечивающая ввод и формирование команд телеуправления при взаимодействии центрального пункта управления с контролируемыми пунктами (КП); РЛС — расширитель локальной сети, позволяющий подключить к локальной сети несколько пользователей; М-М — модем — устройство приема передачи данных по линиям связи (О — основной, Р — резервный); АРМ ШН — автоматизированное рабочее место электромеханика ДЦ, выполняющее функции организации связи ПУ с КП по основному и резервному каналам, контроль и диагностирование аппаратуры ДЦ; РКП-ТУ, РКП-ТС — блоки телеуправления и телесигнализации, обеспечивающие сопряжение аппаратуры ДЦ на КП с устройствами ЭЦ; РКП-Ц — центральный блок управления контролируемыми пунктами, обеспечивающий взаимодействие КП с ПУ, с соседними КП, а так же блоками РКП-ТУ и РКП-ТС; ЛС — локальная сеть.
Агрегатный принцип построения системы на базе РКП обеспечивает высокую унификацию, технологичность в серийном производстве, простоту изменения объема выполняемых функций и конфигураций.
Функциональная и структурная децентрализация системы на основе локальной сетевой архитектуры РКП обеспечивает ее высокую надежность.
Применение блоков РКП-ТУ и РКП-ТС, которые монтируются на базе реле НМШ и устанавливаются на релейном стативе в розетке реле НМШ, способствует сокращению релейного оборудования (стативов, реле, релейных блоков и т.д.), а также объема монтажных работ и внутрипостового кабеля.
Блоки РКП-ТУ предназначены для включения управляющих реле по командам телеуправления поездного диспетчера. Один блок РКП-ТУ позволяет включать до восьми управляющих реле.
Блоки РКП-ТС служат для ввода контролируемых сигналов.
Один блок позволяет обработать до 20 сигналов ТС. Число блоков определяется количеством сигналов.
Резервированные блоки РКП-Центр предназначены для ввода, обработки всех сигналов, поступивших с блоков РКП-ТУ, РКП-ТС и передачи данных на ПУ. Блок РКП-Центр разработан в виде настенного шкафа с набором электронных плат, устанавливается в релейном помещении, один на промежуточной станции.
Система характеризуется следующими общими техническими показателями:
Способ функционирования программный
Тип используемых в РПК микропроцессоров - 80С196, PIC6C63
Хранение рабочих программ - ПЗУ
Операционная система реального времени - QNX
Структура линий связи - радиальная, многоточечная, кольцевая
Число РКП на кольцо связи, не более 15
Число двухпозиционных объектов на РКП:
управления, не более 1008
контроля, не более 2520
Способы опроса объектов контроля - циклический, спорадический, смешанный
Время, с:
цикла опроса объектов контроля, не более 5
передачи одной команды, не более 0.5
отображения поездной ситуации, не более 5
ответа на запрос диспетчера, не более 5
Модуляция каналов ТУ, ТС - частотная
Скорость передачи по каналам ТУ, ТС, Бод, не менее 1200
Характеристика частоты каналов ТУ, ТС, Гц, для сигнала:
логическая 1….1300 ± 10
логический 0….2100 ± 10
Номинальное значение входного и выходного сопротивлений
модема, Ом… 600
Уровень мощности сигнала, дБ:
на выходе передатчика….-28...0
на входе приемника -40…0
Напряжение, обеспечиваемое выходными элементами телеуправления РПК, В, при сопротивлении нагрузки:
1400 Ом, не менее…2
20 Ом….10
Коммутируемый объектами контроля постоянный ток, мА, при напряжении не более 20 В…20...50
Конструкция РКП-ТУ, РКП-ТС - корпус реле НМШ
Напряжение питания источника постоянного тока, В, РКП…24
Вид межблочной связи - локальная сеть
Станция А Станция Б Станция N
Рис. 1. Структурная схема системы «Юг» с распределительными
контролируемыми пунктами
Помимо известных технико-экономических преимуществ систем диспетчерской централизации применение РКП обеспечивает:
использование на станциях изделий отечественного производства:
упрощение и сокращение продолжительности цикла подготовки устройств к сдаче в эксплуатацию:
повышение качества обслуживания системы благодаря автоматическому и автоматизированному многоуровневому тестированию и непрерывному диагностированию устройств РКП и ЭЦ;
сокращение объемов проектных (на 30 %) и строительно-монтажных (на 70 %) работ;
уменьшение расхода монтажного провода на 20—30 % и кабеля межстативных соединений на 90 %;
подключение к лампам табло или «сухим» контактам, что исключает установку дополнительных реле;
снижение энергопотребления в 8—15 раз.
2. Система ДЦ-МПК
Структура системы . Сотрудниками Центра компьютерных железнодорожных технологий (ЦКЖТ) ПГУ ПС разработана и в конце 1995 г. принята в постоянную эксплуатацию система диспетчерской централизации на основе микроЭВМ и программируемых контроллеров ДЦ-МПК. В 1996 г. ДЦ-МПК была адаптирована к условиям метрополитенов и принята в постоянную эксплуатацию на Петербургском метрополитене. Аппаратные средства центрального пункта управления и линейных контролируемых пунктов построены на основе серийно изготавливаемого промышленного оборудования, что обеспечивает низкую себестоимость системы, а значит, и ее высокую конкурентоспособность.
Система ДЦ-МПК обеспечивает реализацию функций управления и контроля рассредоточенных объектов и применяется при диспетчеризации, автоматизации и концентрации управления. Система современная, открытая и наращиваемая, легко адаптируется к условиям конкретного полигона управления при проектировании и их изменении во время эксплуатации.
Кроме того, аппаратура системы может быть использована в целях:
обеспечения поэтапной замены аппаратуры других систем телемеханики, при переносе или модернизации рабочих мест диспетчеров;
управления соседними станциями с опорной (мини ДЦ);
организации центров диспетчерского управления с возможностью объединения АРМов оперативного диспетчерского персонала в локальную сеть;
передачи информации о состоянии полигона управления в вышестоящие иерархические уровни управления.
Центральный пункт управления обеспечивает взаимодействие с линейными контролируемыми пунктами ДЦ-МПК и эксплуатируемыми на железных дорогах линейными КП систем ДЦ «Луч» ЧДЦ, СКЦ и «Нева».
Система ДЦ-МПК состоит из:
устройств центрального пункта управления (ПУ), которые устанавливаются у поездного диспетчера (в отделении, региональном или дорожном центре и т.п.) и могут быть объединены локальной сетью;
аппаратуры линейных контролируемых пунктов (КП) на базе программируемых контроллеров или КП систем «Луч», «Нева», СКЦ и ЧДЦ;
каналов связи между КП и ПУ;
каналов связи и локальной сети для объединения ПУ с другими системами и уровнями управления.
Автоматизированные рабочие места диспетчеров других хозяйств (СЦБ. локомотивного, вагонного, электроснабжения) могут быть подключены к локальной сети АРМов поездных диспетчеров и содержат аппаратуру, необходимую для реализации этих функций.
Информационный обмен между компонентами системы базируется на стандартных протоколах вычислительных систем и локальных сетей.
Аппаратура ДЦ-МПК совместима с информационными системами автоматизированной выдачи предупреждений; вышестоящими системами долговременного планирования дорожного уровня (АРМами дорожных диспетчеров ДГП).
Для обмена информацией с указанными системами используется спорадический способ с квитированием сообщений.
Управление перевозочным процессом осуществляется поездным диспетчером. Для обеспечения его непрерывности при неисправности устройств СЦБ предусматриваются снятие блокировочных зависимостей и передача ответственных команд. В этом случае вся ответственность возлагается на двух человек: поездного диспетчера и дежурного по отделению.
В аварийном режиме (при выходе из строя оборудования ДЦ) управление осуществляется с пульта ЭЦ на станции (резервное управление), при этом возможен централизованный контроль на ПУ.
Безопасность при формировании ответственных команд обеспечивается участием двух агентов движения для формирования двух последовательных кодовых посылок в ограниченном временном Интервале.
Система ДЦ-МПК обеспечивает передачу ответственных команд:
вспомогательной смены направления двусторонней автоблокировки;
вспомогательного перевода стрелок при ложной занятости рельсовой цепи;
искусственного размыкания маршрутов;
вспомогательного открытия переездов;
пользования пригласительными сигналами (на метрополитене);
дачи согласия на пользование пригласительными сигналами при движении по соединительной ветке (на метрополитене).
Общий принцип посылки ответственных команд предполагает передачу подготовительной кодовой посылки. После получения сигнала квитирования посылается рабочая кодовая серия.
Условиями формирования обеих серий является проверка отжатого и нажатого состояний пломбируемой кнопки дежурным по отделению в соответствующие моменты выполнения алгоритма. Дополнительно в режиме ответственных команд программно исключается управление другими объектами СЦБ.
Аппаратура центрального пункта управления. Центральный пункт диспетчерского круга обычно находится в здании отделения или управления дороги. Он представляет собой АРМ поездного диспетчера, которое реализовано на базе современной вычислительной техники (рис. 2). На ПУ одного диспетчерского круга используются два компьютера: основной (т.е. реализующий команды телеуправления) и резервный, который постоянно находится в работе (так называемый «горячий» резерв).
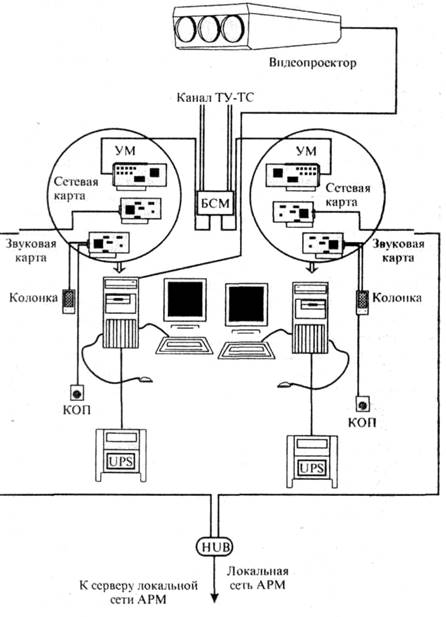 |
Рис. 2. Структурная схема центрального поста системы ДЦ-МПК
В системном блоке каждой рабочей машины установлены: универсальный модем УМ, сетевая карта, звуковая карта.
К компьютеру подключаются следующие внешние устройства: дисплей с диагональю 20—21; клавиатура, манипулятор «мышь»; блок согласования модемов БСМ; акустический громкоговоритель (колонка); кнопка ответственных приказов (КОП); кабель локальной сети; видеопроектор или плазменная панель.
Для обеспечения устойчивой работы системы при перебоях в электропитании все устройства включаются в питающую сеть через источник бесперебойного питания UPS и сетевые фильтры.
Универсальный модем является основой каналообразующей аппаратуры ДЦ-МПК и обеспечивает функции усиления, демодуляции и анализа правильности структуры кодовой последовательности известительного сигнала. При передаче команд телеуправления в УМ формируется управляющий код (временные параметры, стартовые и стоповые импульсы), а также осуществляется модуляция и задается необходимый уровень аналогового сигнала ТУ. Кабелем модем соединяется с БСМ, который обеспечивает подключение комплектов к каналу передачи. Информация о состоянии стационарных путевых объектов обновляется в режиме реального перевозочного процесса в виде известительных кодовых посылок. При этом на ПУ после БСМ известительный сигнал поступает на модем, где выполняются функции усиления, демодуляции и анализа правильности структуры кодовой последовательности. При этом проверяются: качество стартового и стопового импульсов; временные параметры сигнала (длительностей импульсов и сигналов); полнота кодовой последовательности; дешифрация адресной части сигнала и качество информационных импульсов.
Затем сигнал направляется в соответствующий массив памяти, который через интерфейс ISA перенаправляется в память компьютера. Здесь кодовая последовательность, отображающая состояние станционных объектов, обрабатывается функциями алгебры логики, в соответствии с которыми происходит перерисовка изображения на экране дисплея.
Для передачи команды ТУ пользователь выбирает объекты управления, которым соответствуют в массиве команд кодовые последовательности, содержащие адресную и исполнительную
части. Кодовая последовательность направляется через интерфейс ISA в универсальный модем. Последний формирует сигнал ТУ и передает его в линию.
Сетевая карта предназначена для обмена информацией по локальной сети. Кабелем типа «витая пара» компьютер подключается к концентратору HUB и с его участием обменивается информацией с другими машинами, а также с сервером локальной сети, где ведется протоколирование работы всех АРМов центра диспетчерского управления.
Звуковая карта совместно с акустической колонкой применяется для формирования речевых сообщений при возникновении нештатных ситуаций (отказы устройств, отключение электропитания, отклонение поезда от графика движения и т.п.).
Дисплей отображает актуальную информацию: поездное положение, положение стрелок, сигналов, блок-участков и др. Для большей информативности применяются дисплеи с диагональю экрана 20—21. Во избежание эффекта мерцания дисплеи должны представлять изображение с кадровой разверткой не менее 85 Гц. Кроме дисплеев, в центрах диспетчерского управления система ДЦ-МПК позволяет применить видеопроекторы или плазменные панели в качестве табло коллективного пользования информацией.
Манипулятор «мышь» является основным средством управления всистеме. Клавиатура используется для ввода необходимых символьно-цифровых данных, а также для дублирования действий «мыши» в случае неисправности последней.
Аппаратура линейного контролируемого пункта. Линейный КП представляет собой комплекс программно-аппаратных средств, предназначенных для сбора, обработки, передачи на ПУ информации о состоянии двухпозиционных объектов и приема от ПУ и исполнения команд телеуправления. Как и ПУ, КП состоит из двух комплектов 100 % резервированной аппаратуры на основе программируемых контроллеров (основного и резервного). Резервный комплект находится во включенном, рабочем, состоянии и готов перейти в активное состояние. Переключение комплектов осуществляется: автоматически — благодаря взаимному контролю полукомплектов; командой, поступающей от ПУ (при возникновении систематических сбоев); кнопками на лицевой панели КП для выполнения ремонтных и профилактических работ обслуживающим персоналом.
Комплекс устройств КП, как правило, располагается в релейном помещении. На станциях автономного управления КП, для сокращения затрат на оборудование, может находиться в табло дежурного по станции.
Оборудование КП размещается в электротехническом шкафу, который имеет пыле- и влагозащитную конструкцию.
Контроллер КП состоит из следующих компонентов (рис.3):
промышленного одноплатного компьютера SSC-5x86H, основанного на базе архитектуры процессора 486 и содержащего центральный процессор AMD486-DX2. видеоадаптер, контроллер клавиатуры, энергонезависимую память на основе микросхемы Flash емкостью 2 Мбайта, оперативную память до 64 Мбайт, систему портов для подключения внешних устройств (жесткие, гибкие диски), громкоговоритель;
двух плат ввода-вывода;
сетевой карты;
универсального модема;
платы обработки аналоговых сигналов.
Основными функциями контроллера являются: циклический опрос входов УМВ-56/8, обработка полученной информации с фиксацией изменения состояния контролируемых объектов, формирование известительных приказов в соответствующем формате, фиксация поступления из канала команд телеуправления объектами, реализация команд ТУ через интерфейсное устройство сопряжения с объектами управления. При включении питания комплекта контроллер проводит проверку устройств, входящих в его состав. В случае успешного тестирования в контроллере автоматически запускается программа работы линейного пункта, что сопровождается звуковым сигналом. Программа периодически проверяет наличие приказа ТУ в канале телеуправления, и при обнаружении стартовой посылки приказа начинается заполнение внутреннего буфера командой ТУ. По окончании приема содержимое буфера сравнивается с электронной таблицей управляющих кодов канала ТУ для определения объектов управления. При совпадении полученной команды и приказа в таблице включается соответствующее управляющее реле на плате TB-24R или УДО-48. В противном случае содержимое буфера аннулируется.
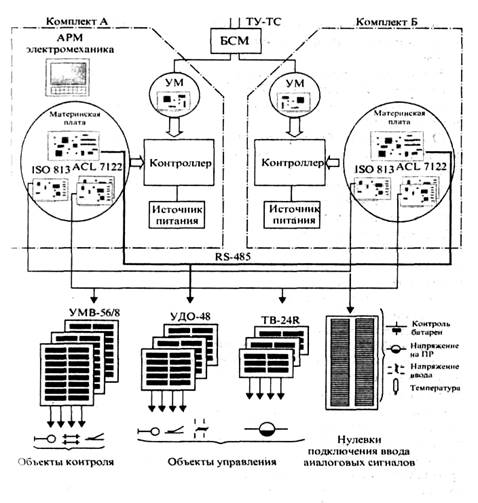
Рис. 3. Структурная схема линейного поста системы ДЦ-МПК
Вместе с ожиданием приказа ТУ проводится опрос плат УМВ-56/8, реализующих матричный съем информации о состоянии объектов в течение восьми циклов. В каждом цикле считывания на все платы УМВ комплекта выставляются одинаковые управляющие слова, что отражается показаниями светодиодов на этих платах. В паузе между считываниями таких блоков информация о состоянии объектов сортируется по группам, которые соответствуют таблице занятости канала ТС. В другом массиве памяти контроллера так же хранится содержание групп ТС, полученное в предыдущем сеансе. Новое содержание группы сравнивается со старым и, если в группе произошли изменения, она направляется в буфер передачи. Группы с новой информацией по очереди передаются на центральный пост.
Для сокращения времени обновления информации о поездной ситуации у диспетчера часть групп, связанных с дополнительной диагностической информацией о состоянии устройств СЦБ, не передается на ПУ. Эти данные всегда доступны только для пользования на КП (АРМ электромеханика СЦБ) и могут быть переданы на ПУ после поступления команды запроса.
Каналообразующие устройства . В каналообразующую аппаратуру входят универсальный модем и блок сопряжения с линией (рис.4).
Универсальный модем УМ является программно-аппаратным средством, предназначенным для организации обмена информацией между ПУ и КП системы. Модем обеспечивает связь с линейными КП по двух- или четырехпроводной линии (Л). Канал связи может быть тональным или физическим. Он также обеспечивает связь с контролируемыми пунктами в протоколе систем ДЦ-МПК, ЧДЦ-66, «Луч» и «Нева». В этом случае в модем загружается программный драйвер протокола обмена информацией соответствующей системы ДЦ.
Модем представляет собой две платы, устанавливаемые в системный блок компьютера. На основной плате (комплект 1) расположен микропроцессор цифровой обработки сигналов (сигнальный процессор). Дополнительная плата (комплект 2) предназначена для преобразования аналоговых сигналов в цифровые и регулировки уровней сигналов.
Модемы обоих комплектов на ПУ подключаются к устройству сопряжения с линией связи БСМ, которое обеспечивает
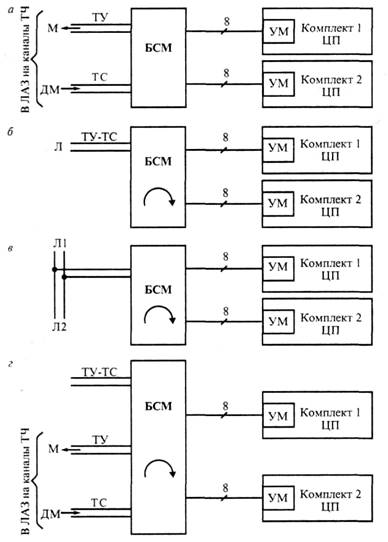
Рис. 4. Схемы сопряжения четырехпроводной (а), двухпроводной (б), двух двухпроводных (в) и двух- и четырехпроводных (г) цепей с каналом связи гальваническую развязку и согласование с двух- и четырехпроводной линиями.
Модем может работать в активном и пассивном режимах. Переключение из одного режима в другой выполняется по команде компьютера. Пассивный (резервный) режим предназначен для сопряжения с каналом связи только по тракту ТС, а активный режим — по трактам ТС и ТУ. Это позволяет организовывать «горячее» резервирование аппаратуры ПУ, когда два модема подключены параллельно к одному и тому же каналу связи.
При подаче напряжения на модем (т.е. при включении компьютера) выполняется самотестирование и при успешном его завершении модем переходит в резервный режим работы. В этом режиме передатчик модема не работает, а приемник синхронизируется с передатчиком другого модема, работающего в активном режиме. Приемник принимает сигналы ТС от КП по четырем частотным каналам.
В активном режиме модем передает сигналы цикловой синхронизации ТУ в соответствии с регламентом работы системы ДЦ-МПК или «Луч», «Нева». В УМ имеется возможность регулировки уровней передачи сигналов ТУ непосредственно на ПЭВМ АРМа поездного диспетчера и дистанционно по локальной сети с АРМа электромеханика. В табл. 1 приведены рабочие уровни сигналов каналообразующей системы ДЦ-МПК.
Кроме выполнения функции сопряжения активного и пассивного модемов с линиями связи БСМ, может использоваться как усилительный и трансляционный пункт, а также для согласования тонального четырехпроводного канала и двухпроводных физических линий связи.
Таблица 1
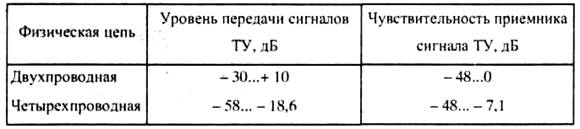
Сигналы ТУ1 и ТУ2 двух модемов суммируются и передаются в четырехпроводную линию, а также через разделительный фильтр низкой частоты в двухпроводную линию связи. Выходной сигнал ТУ модема, работающего в резервном режиме, равен нулю. В связи с этим используемая схема включения модемов не создает интерференции сигналов ТУ. Обеспечивается возможность смены режима активный / резервный для каждого модема без дополнительной коммутации сигналов.
Сигнал ТС из четырехпроводной линии суммируется с сигналом ТС из двухпроводной линии и поступает на входы модемов. Для разделения сигналов ТУ и ТС в двухпроводной линии используется фильтр высокой частоты. Схема БСМ обеспечивает возможность приема сигналов ТС одновременно из двух- и четырехпроводных линий, а также использования БСМ для передачи сигналов в ретрансляционных пунктах (рис.5). На этом рисунке ЛАЗ — линейно-аппаратный зал, М — модулятор, ДМ — демодулятор.
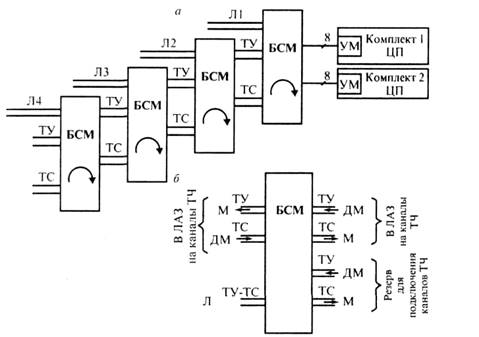
Рис. 5. Схемы включения нескольких радиальных направлений (а ) и трансляционного и усилительного пунктов (б)
В случае использования волоконно-оптических линий связи (ВОЛС) аналоговые УМ и БСМ не используются. Аппаратура ПУ и КП подключается непосредственно к коммутаторам или маршрутизаторам ВОЛС. Такой способ организации передачи информации позволяет значительно повысить быстродействие, функциональные и информационные возможности системы ДЦ-МПК. На Петербургском метрополитене система ДЦ-МПК работает по каналам ВОЛС с 1998г.