Моделирование электропривода насосной станции
СОДЕРЖАНИЕ: КУРСОВАЯ РАБОТА Тема: «Моделирование электропривода насосной станции» Воронеж 2010 Введение В данной курсовой работе рассматривается электропривод насоса для подпитки тепломагистралей водой на ТЭЦ. Это тепло идет на нужды различных заводов, и на обогрев жилых зданий правого берега. В системе используется четыре насоса: три (дополнительные) могут питаться как от сети, так и входить в режим регулирования частотой для всех четырех двигателей, а один (основной) – двигатель, работающий с преобразователем частоты.
КУРСОВАЯ РАБОТА
Тема:
«Моделирование электропривода насосной станции»
Воронеж 2010
Введение
В данной курсовой работе рассматривается электропривод насоса для подпитки тепломагистралей водой на ТЭЦ. Это тепло идет на нужды различных заводов, и на обогрев жилых зданий правого берега. В системе используется четыре насоса: три (дополнительные) могут питаться как от сети, так и входить в режим регулирования частотой для всех четырех двигателей, а один (основной) – двигатель, работающий с преобразователем частоты. Для удобства, мы рассмотрим систему, в которой только основной двигатель работает с преобразователем частоты.
ТЭЦ предназначена для нужд близлежащих заводов, а также это первый по значимости в Воронеже источник тепла для жилых домов.
Раньше на предприятии регулировка давления воды осуществлялось весьма неэффективным способом – дросселированием с помощью задвижек. При дросселировании регулирование расхода осуществляется за счет изменения эффективного сечения трубопровода с помощью заслонки. В этом случае насос, так же как и при отсутствии регулирования, тратит энергию на преодоление противодавления заслонки, а повышенное давление вызывает утечки жидкости и износ оборудования. Соответственно, уменьшается полезная мощность насоса. Добавим также, что описанный метод неэффективен, так как изменения давления подкачка воды тоже меняется. Этот способ связан с повышенным энергопотреблением, невысокой точностью регулирования технологических параметров, а также повышенным износом электрического, механического и гидравлического оборудования. Прямые пуски двигателей большой мощности вызывают ударные нагрузки в передаточных механизмах, недопустимые посадки напряжения в системах электроснабжения.
Использование регулируемого электропривода вносит следующие преимущества:
– значение КПД насоса зависит от частоты вращения двигателя, так как частота двигателя регулируется, то насос может работать с максимальной производительностью;
– если основной двигатель, которым управляет преобразователь не справляется с нагрузкой, подключаются дополнительные двигатели;
– дополнительные двигатели запускаются так, чтобы давление в системе не превысило определенного значения;
Наиболее современным способом регулирования насосов является регулирование с помощью преобразователей частоты.
В случае применения преобразователя частоты, осуществляется поддержание давления в гидросистеме независимо от расхода, с помощью регулирования частоты вращения электродвигателя насоса. Таким образом, при малых расходах насос вращается на малой скорости необходимой только для поддержания номинального давления и не расходует лишней энергии. Экономится электроэнергия, а так же вода, тепло и ресурс оборудования.
Данный курсовой проект посвящен моделированию системы водоснабжения, а именно моделированию насосной станции с преобразователем частоты.
1. Описание технологического процесса
Режим водопотребления в городе характеризуется большой неравномерностью расходов, с коэффициентом часовой неравномерности. Это значит, что днем в период максимального разбора воды ее часовой расход может в несколько раз превышать среднее значение суточного расхода. Ночью, наоборот, расход воды резко сокращается.
Непосредственное включение насоса в сеть в условиях сильной неравномерности расхода привело бы к ненормальному режиму работы насоса с недостаточным напором или, наоборот, с малой подачей и чрезмерным давлением. На такие режимы работы и насосы, и сеть водоснабжения не рассчитаны, при этом в сети происходили бы глубокие перепады давления, перебои в подаче воды, резко возросло бы потребление электроэнергии. Включение в сеть водоснабжения преобразователя частоты позволяет насосу и потребителям воды действовать по своим графикам, причем насос всегда работает в расчетном, наиболее выгодном и правильном режиме.
Автоматизация насоса позволяет избежать всех недостатков ручного управления. Благодаря автоматизации не требуется дополнительных затрат труда и участие человека в технологическом процессе. При достаточно частой подкачке можно не опасаться замерзания воды, что особенно опасно зимой в ночной период, когда расход воды практически прекращается.
Регулирование избытка воды или недостачи принято частотными регуляторами фирмы Mitsubishi.
Наружный водопровод для железнодорожной станции и для жилого населенного пункта проектируем объединенный, обслуживающий одновременно:
1. хозяйственно питьевые нужды;
2. производственные нужды;
3. противопожарные нужды.
2. Технические данные
Для моделирования технического процесса необходимо рассчитать асинхронный электродвигатель, который присоединяется к насосы.
Расчет характеристик двигателя:
Типоразмер электродвигателя 4А250М2У3.
Таблица 1 – Характеристики двигателя
| Величина |
Значение |
| P 2 ном , кВт |
90 |
| Синхронная частота вращения, об/мин |
3000 |
| КПД, % |
92,0 |
| cos |
0,9 |
| X µ , отн. ед. |
5,2 |
|
|
0,029 |
|
|
0,078 |
|
|
0,016 |
|
|
0,13 |
| J д , кгм2 |
0,52 |
| S ном , % |
1,4 |
| Число пар полюсов |
2p=2 |
![]() (Гн); (2.8)
(Гн); (2.8)
![]() (Гн); (2.9)
(Гн); (2.9)
![]() (Гн); (2.10)
(Гн); (2.10)
![]() (Гн); (2.11)
(Гн); (2.11)
![]() (Гн); (2.12)
(Гн); (2.12)
![]() (Гн); (2.13)
(Гн); (2.13)
Преимущества:
1. Низкая стоимость внедрения и эксплуатации.
2. Снижение эксплуатационных расходов на обслуживание.
3. Экономия электроэнергии до 15–50%, с учетом различных суточных режимов работы.
4. Стабильность создаваемого давления за счет автоматического регулирования производительности насоса.
5. Повышение ресурса погружного насоса труб и запорной арматуры за счет исключения пусковых токов, исключения гидравлических ударов, плавного регулирования, плавного пуска и останова.
6. Возможность интеграции с системами учета расхода воды и электроэнергии.
7. Возможность работы с автономным аварийным источником.
8. Полностью необслуживаемый автоматический режим работы.
9. При наличии нескольких скважин обеспечивает периодическую смену работающего насоса.
10. При недостаточной производительности одного насоса автоматическое включение второго (при наличии нескольких скважин).
3. Математическое описание системы
Электрические машины в общем случае являются многофазными. Они описываются системами дифференциальных уравнений высокого порядка, анализ которых затруднен. Без ущерба качества можно перейти от многофазной электрической машины к двухфазной [1].
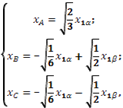
Формулы преобразования 3/2 и 2/3:
 (3.1)
(3.1)
где kc – коэффициент согласования,
 (3.2)
(3.2)
 (3.3)
(3.3)
где ![]()
Уравнения для преобразования 3/2:
 (3.4)
(3.4)
Уравнения для преобразования 2/3:
 (3.5)
(3.5)
Реализация преобразования 3/2 в системе Simulink выглядит следующим образом:
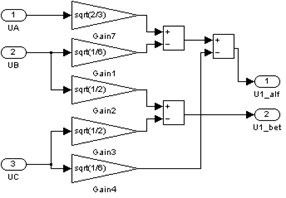
Рисунок 2 – Схема преобразования 3/2
На вход блока преобразования 3/2 подаем 3-х фазное синусоидальное напряжение, на выходе получаем 2-х фазное напряжение статора:
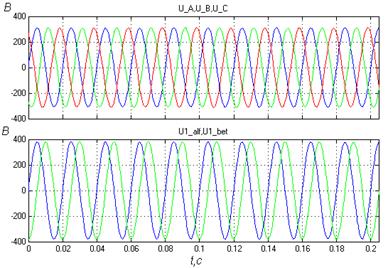
Рисунок 3 – Осциллограмма 3-х фазного напряжения и 2-х фазного напряжения статора
Реализация преобразование 2/3 в системе Simulink выглядит следующим образом:
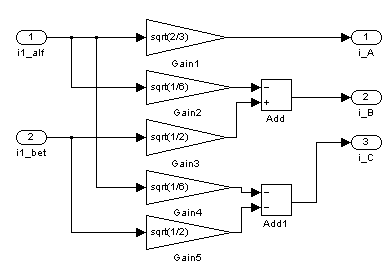
Рисунок 4 – Схема преобразования 2/3
На вход преобразователя 2/3 подаем 2-х фазные токи статора, на выходе получаем 3-х фазные токи:
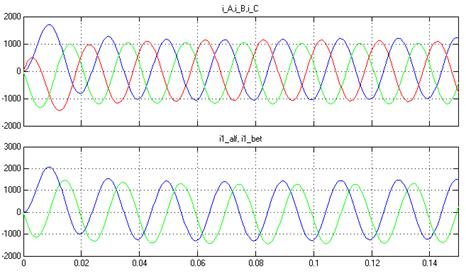
Рисунок 5 – Осциллограмма 2-х фазных тока статора и 3-х фазных токов статора
Подсистема реализующая насосную характеристику:
![]() (3.7)
(3.7)
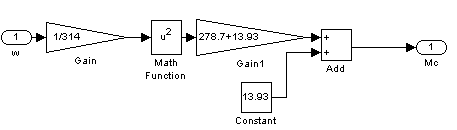
Рисунок 6 – Моделирование насосной характеристики
Получим график насосной характеристики:
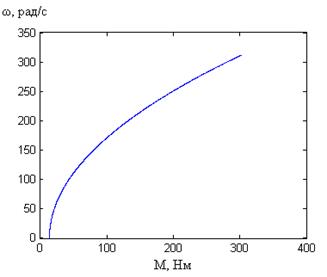
Рисунок 7 – График насосной характеристики
Подсистема задатчика давления:
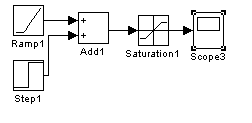
Рисунок 8 – Схема задачи давления
С помощью осциллографа получим график задатчика давления:
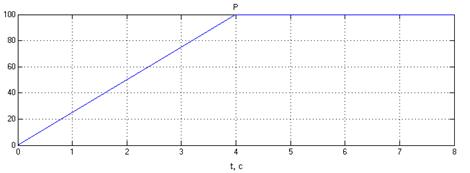
Рисунок 9 – График задатчика давления
Подсистема формирования напряжения в зависимости от давления представляет собой:

Рисунок 10 – Подсистема формирования напряжения
На вход блока подаем сигналы:
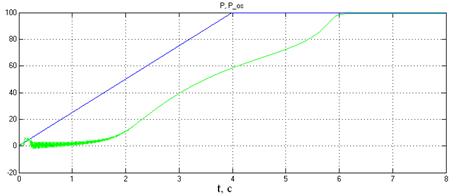
Рисунок 11 – Осциллограммы давления в системе и задатчика давления
На выходе получаем формирование напряжения и частоты:
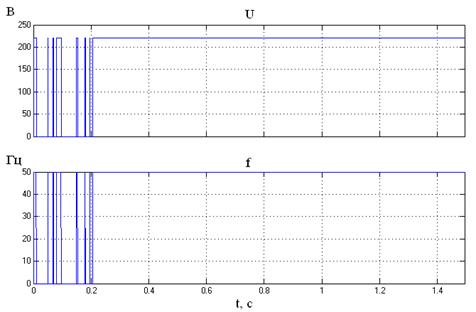
Рисунок 12 – Осциллограммы напряжения и частоты, сформированные для преобразователя частоты
Преобразователь частоты:
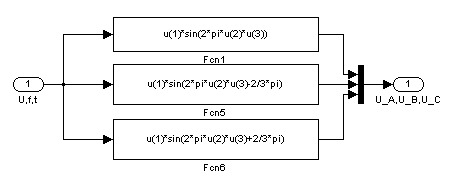
Рисунок 13 – Сигналы для преобразователя частоты
На выходе преобразователя частоты получаем 3-х фазную систему напряжения:
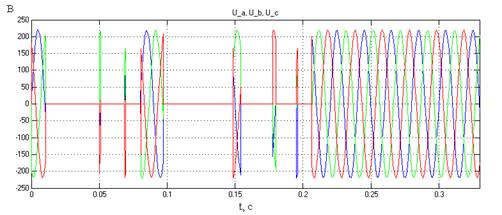
Рисунок 14 – Осциллограммы напряжения сформированные преобразователем частоты
Четыре уравнения системы содержат восемь линейно зависимых переменных. Необходимо, с помощью выражений связи токов и потокосцеплений обмоток статора и ротора исключить две пары переменных, то есть выбрать состав компонент вектора ![]() .
.
Система потокосцеплений:
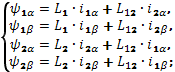 (3.9)
(3.9)
Из двух последних уравнений системы выразим токи ротора:
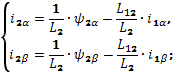 (3.10)
(3.10)
Полученные выражения подставим в уравнения для потокосцеплений статора, то есть первые два уравнения:
 (3.11)
(3.11)
Обозначив:
![]() (3.12)
(3.12)
Получим выражения для потокосцеплений обмоток статора:
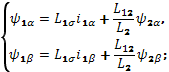 (3.13)
(3.13)
Обозначив:
![]() ;
;
Полный момент:
![]() (3.16)
(3.16)
Рассмотрим элементы, входящие в состав подсистем:
Подсистема «EL_MAG_1»:
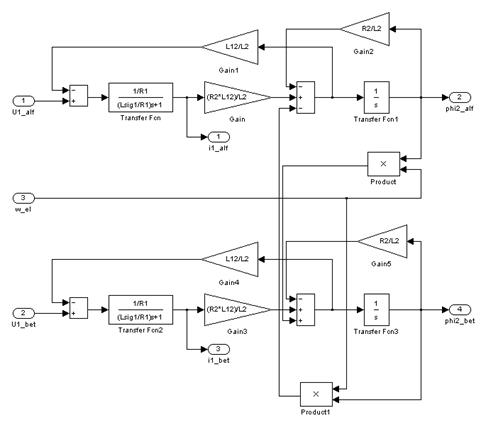
Рисунок 15 – Подсистема электромагнитного преобразователя EL_MAG_1
Подсистема «EL_MAG_2»:
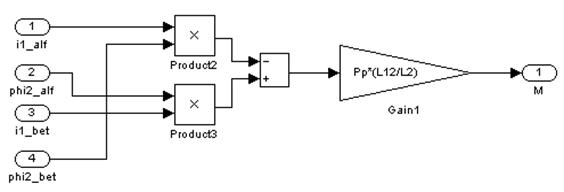
Рисунок 16 – Подсистема электромагнитного преобразователя «EL_MAG_2»
Подсистема «Mech»:
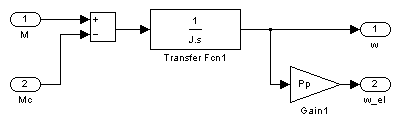
Рисунок 17 – Подсистема механического преобразователя «Mech»
Соединив вместе три подсистемы (EL_MAG_1, EL_MAG_2, Mech), получаем модель асинхронного электродвигателя в двухфазной системе координат (, ).
4. Работа насосной станции без преобразователя частоты
Моделирование в среде Simulink:
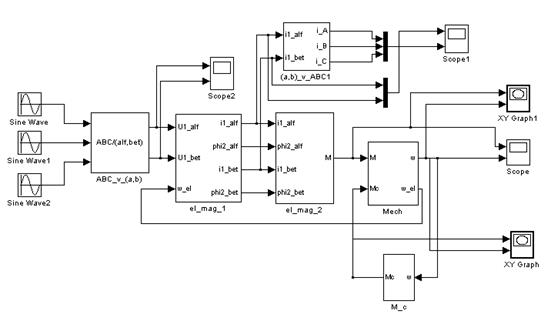
Рисунок 18 – Схема прямого запуска АД
Динамическая характеристика электродвигателя при прямом пуске (без преобразователя частоты) выглядит:
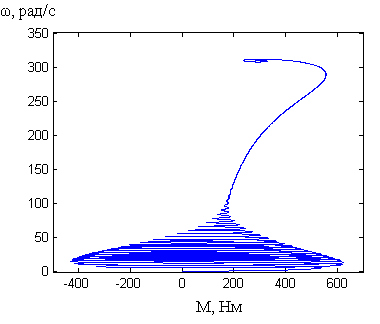
Рисунок 19 – Динамическая характеристика
Токи статора электродвигателя:
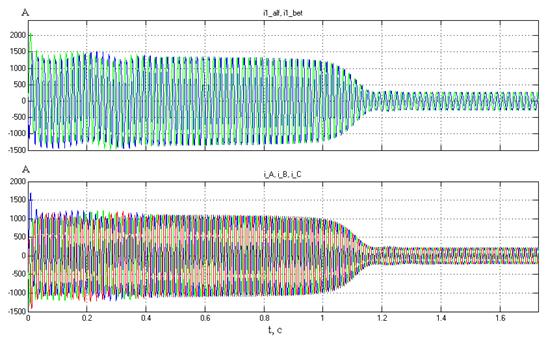
Рисунок 20 – Осциллограмма токов статора
График момента, момента сопротивления и скорости электродвигателя:
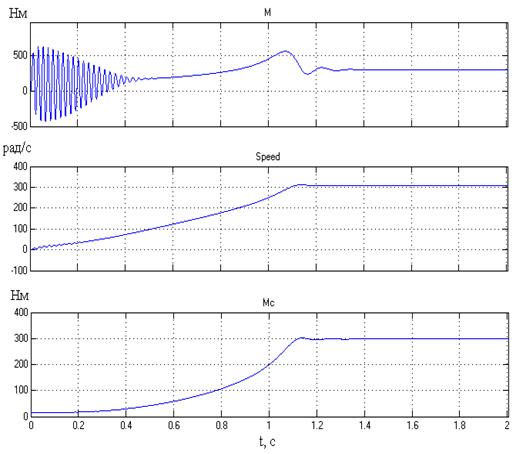
Рисунок 21 – Осциллограмма момента, момента сопротивления и скорости при прямом пуске.
Соединив вместе модели преобразователя частоты и асинхронного двигателя, получим модель управляемой насосной станции.
5. Работа насосной станции с частотным преобразователем
Смоделируем в среде Simulink насосную станцию с П – регулятором:
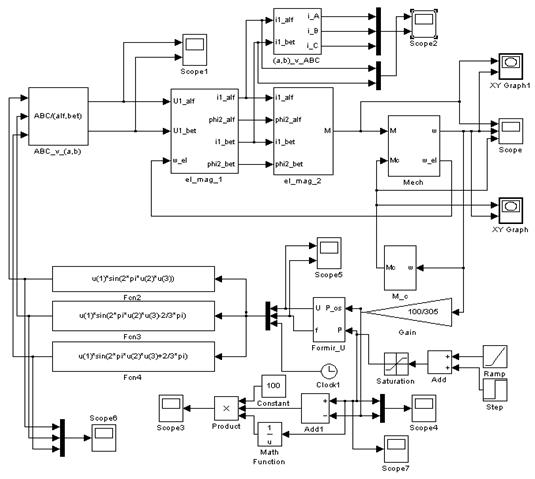
Рисунок 22 – Схема пуска АД с ПЧ
Динамическая характеристика электродвигателя (запуск с преобразователем частоты):
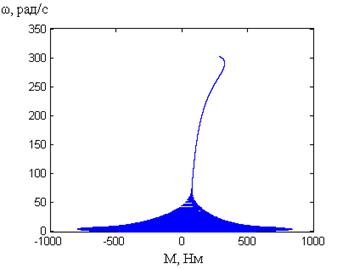
Рисунок 23 – Динамическая характеристика АД с П – регулятором
Токи статора электродвигателя имеют вид:
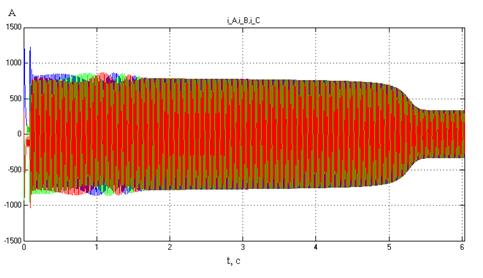
Рисунок 24 – Осциллограмма токов статора
График момента, момента сопротивления и скорости электродвигателя имеют вид:
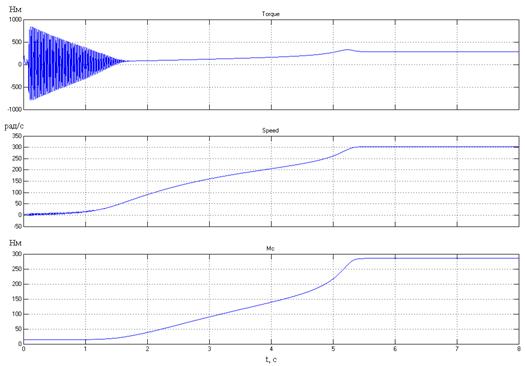
Рисунок 25 – Осциллограммы момента, момента сопротивления и скорости АД при пуске с ПЧ и П-регулятором
Графики задатчика давления и давления в системе с П – регулятором:
Рисунок 26 – Осциллограммы задатчика давления и давления в системе
При увеличении рисунка 28 можно рассмотреть ошибку регулирования:
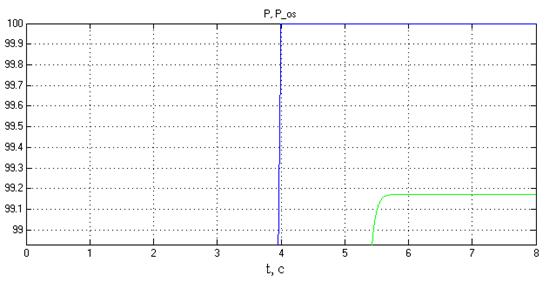
Рисунок 27 – Ошибка регулирования
Представим в виде графика ошибку системы:
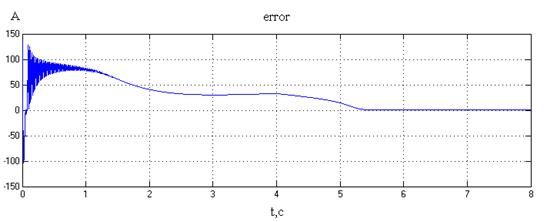
Рисунок 28 – Ошибка системы в процентах
Система с П – регулятором выдает нужное давление в системе и стоимость его ниже стоимости ПИ – регулятора.
Заключение
В данной работе было проведено моделирование подкачки воды асинхронными двигателями. Для этого из типовых блоков Simulink была составлена схема управления. На основе полученной схемы был смоделирован микроконтроллер. Для получения подержания постоянного параметра (давления) в системе была заведена обратная связь по давлению. В результате чего «основной» двигатель поддерживал постоянное давление в системе.
Список литературы
1. Фурсов В.Б. Моделирование электропривода: учеб. пособие / В.Б. Фурсов. Воронеж: ГОУВПО «Воронежский государственный технический университет», 2008. 105 с.
2. Фурсов В.Б. Моделирование в системе SimPowerSysem. Учебное пособие. Воронеж.: Воронеж. гос. техн. ун-т; 2005. 116 с.