на тему “
СОДЕРЖАНИЕ: Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с незатухающими гармоническими колебаниями могут использоваться частотно-модулированные и дрМинистерство образования РФ
Санкт-Петербургский государственный электротехнический университет ЛЭТИ
Реферат на тему “Радиолокационные системы самолетов”
Выполнил: Солдатов Б.С.
Группа: 3411
Проверил: Никоза А.В.
Санкт-Петербург
2008г
Радиолокация– область радиотехники, обеспечивающая радиолокационное наблюдение различных объектов, то есть их обнаружение, измерение координат и параметров движения, а также выявление некоторых структурных или физических свойств путем использования отраженных или переизлученных объектами радиоволн либо их собственного радиоизлучения.
Информация, получаемая в процессе радиолокационного наблюдения, называется радиолокационной. Радиотехнические устройства радиолокационного наблюдения называются радиолокационными станциями (РЛС) или радиолокаторами. Сами же объекты радиолокационного наблюдения именуются радиолокационными целями или просто целями. При использовании отраженных радиоволн радиолокационными целями являются любые неоднородности электрических параметров среды (диэлектрической и магнитной проницаемостей, проводимости), в которой распространяется первичная волна. Сюда относятся летательные аппараты (самолеты, вертолеты, метеорологические зонды и др.), гидрометеоры (дождь, снег, град, облака и т. д.), речные и морские суда, наземные объекты (строения, автомобили, самолеты в аэропортах и др.), всевозможные военные объекты и т. п. Особым видом радиолокационных целей являются астрономические объекты.
Передатчик РЛС вырабатывает высокочастотные колебания, которые модулируются по амплитуде, частоте или фазе иногда весьма сложным образом. Эти колебания подаются в антенное устройство и образуют зондирующий сигнал. Наибольшее применение находит зондирующий сигнал в виде последовательности равноотстоящих по времени коротких радиоимпульсов. Наряду с простыми радиоимпульсами может применяться внутриимпульсная частотная модуляция и фазовая манипуляция. Другим видом зондирующего сигнала является непрерывный. Здесь наряду с незатухающими гармоническими колебаниями могут использоваться частотно-модулированные и др.
Излучаемые колебания нельзя считать радиолокационным сигналом, так как они никакой информации о цели не несут. После того, как электромагнитная волна, падающая на цель, вызывает в ее теле вынужденные колебания электрических зарядов, цель, подобно обычной антенне создает свое электромагнитное поле. Это поле в дальней зоне представляет собой вторичную, то есть отраженную волну, создающую в РЛС радиолокационный сигнал, который является носителем информации о цели. Так амплитуда сигнала в определенной степени характеризует размеры и отражающие свойства цели, время запаздывания относительно начала излучения зондирующего сигнала используется для измерения дальности, а частота колебаний благодаря эффекту доплела несет информацию о радиальной скорости цели. Поляризационные параметры отраженной волны могут также быть использованы для оценки свойств цели. Наконец, направление прихода отраженной волны содержит информацию об угловых координатах цели.
Приемник РЛС необходим для оптимального выделения полезного сигнала из помех (так называемая первичная обработка сигнала). Оконечное (выходное) устройство служит для представления радиолокационной информации в нужной потребителю форме. Если потребителем является человек-оператор, то используется визуальная индикация. Для потребителя в виде вычислительного устройства непрерывного действия оконечным является устройство автоматического сопровождения цели по измеряемому параметру (дальность, угловые координаты, скорость), и полезная информация выдается в виде напряжений или токов, функционально связанных с этими параметрами. Если же оконечным устройством является ЭВМ, то радиолокационная информация преобразовывается в двоичный код. При этом в ЭВМ происходит дальнейшая, так называемая вторичная обработка сигнала.
Вооружение современного самолёта представляет собой тесно связанный комплекс различных систем, которые можно условно разделить на Систему Управления Вооружением (СУВ), и непосредственно подвесное и встроенное вооружение.
Основой СУВ в первую очередь является Бортовая Радиолокационная Станция (БРЛС). Проведём краткий обзор истории развития РЛС воздушного базирования.
1. Первое поколение БРЛС, появившееся во время Второй Мировой позволяло только приблизительно оценить дальность до цели и направление правее/левее и выше/ниже и только на малой дальности. Антенна были выполнены в виде массивов штыревых неподвижных антенн, отдельно приёмников и излучателей. РЛС позволяла только вывести перехватчик в район цели, далее обнаружение и сама атака выполнялись визуально.
В конце войны появились параболические антенны, что дало возможность точнее оценивать расстояние и направление до цели. Первая отечественная БРЛС Изумруд устанавливалась на истребители МиГ-15 и МиГ-17. РЛС работала в импульсном режиме, и могла обнаруживать и сопровождать цели, летящие выше истребителя. Обнаружение и сопровождение осуществлялось двумя переключаемыми антеннами. Её дальнейшее развитие - Изумруд-2 имела уже одну антенну, вдвое большего диаметра, за счёт чего возросла дальность обнаружения целей (цель типа В-29 Изумруд обнаруживала на дистанции до 15км, Изумруд-2 до 25-30км).
Для перехватчиков Як-25 была создана БРЛС Сокол, и её модификация Орёл для Су-11, Як-28 и Су-15. За счёт большего диаметра зеркала и большей мощности передатчика дальность обнаружения цели типа В-29 возросла до 40 км.
2. Второе поколение БРЛС использовало уже полупроводники и микроминиатюрные лампы, но принципиально от первого поколения не отличались. К ним относятся БРЛС Алмаз самолётов Су-9, Сапфир-21 истребителей МиГ-21, Смерч перехватчиков Ту-128 и Смерч-А для МиГ-25. Основное отличие - снижение массогабаритных характеристики и улучшение сопряжения с комплексами бортового вооружения, в первую очередь - с ракетами В-В с полуактивными ГСН.
3. Третье поколение преследовало цель обнаружения самолётов на фоне земли, т.е. летящих ниже носителя. Для выделения сигнала цели на фоне отраженных от земли применён метод селекции движущихся целей с внешней когерентностью. Опорный сигнал создавался за счёт отражения зондирующих импульсов от протяженных объектов на земле. После захвата цели БРЛС переходит в режим непрерывного излучения для подсветки цели при атаке ракетами с доплеровскими полуактивными ГСН.
Первой БРЛС стала Сапфир-23 для истребителей-перехватчиков МиГ-23 и её модификация Сапфир-25 соответственно для МиГ-25.
4. К четвёртому поколению относят импульсно-доплеровские БРЛС с режимом квазинепрерывного излучения (КНИ). Данный режим, используя высокую частоту повторения зондирующих импульсов (причём каждая пачка импульсов состоит из пактов разных частот) детектирует движущиеся цели на фоне земли гораздо лучше. Но при этом значительно возрастает нагрузка на вычислительную подсистему БРЛС, первой БРЛС с полностью цифровой архитектурой стала APG-63 истребителя F-15. У нас работы по созданию БРЛС начались с создания РЛС для истребителей МиГ-31 и Су-27. При создании БРЛС Заслон впервые применена ФАР (комплекс принят на вооружение в 1981 году). При создании БРЛС для Су-27 ставилась задача превзойти APG-63, и для этого применили оригинальную антенну с электронным сканирование луча по углу места и механическим сканированием по азимуту со стабилизацией по крену. Идея была в том, что плоскость электронного сканирования антенны можно было совместить с двумя целями и добиться одновременного обстрела обеих ракетами Р-27 с полуактивной ГСН. К сожалению, созданный комплекс оказался неработоспособен в воздухе. Наряду с необходимостью коренной переработки и самого Су-27, начались работы по созданию БРЛС одноканального наведения на базе создаваемой в то же время БРЛС Н-019, истребителя МиГ-29. Главным отличием стала антенна большего диаметра и соответственно доработанный её силовой привод и узлы крепления. При этом возник неприятный момент - РЛС невидит цели расположенные ниже 3 градусов от плоскости горизонта, в момент смены полусферы наблюдения (т.е. расположенные перпендикулярно вектору наблюдения). Для этого было введено инерциальное сопровождение таких целей. Увы, от двухканальности наведения пришлось отказаться, так как чисто механический привод не позволял добиться требуемой скорости переброски диаграммы направленности. В 1985 году комплекс был принят на вооружение. В 1983 году также завершились испытания истребителя МиГ-29 БРЛС которого отличалась большой степенью унификации с БРЛС Су-27.
На данный момент созданы БРЛС Оса для оснащения лёгких самолётов (МиГ-2УБТ, в перспективе модернизация МиГ-21) и Сокол для оснащения тяжелых истребителей Су-37, Су-30МК и Су-35. Обе они оснащены ФАР и способны атаковать от 4 до 6 целей. Характеристики отечественных БРЛС приведены на рисунке 1.
| Наименование |
Н-007 (РП-31) Заслон |
Н-001 |
Н-019 |
Копье-21И |
Москит-23 |
Н-019М Топаз |
Оса |
Н-010 Жук |
Н-010М Жук-27 (Жук-М) |
Сокол |
Н-011М Барс |
|
| Радиолокационный прицельный комплекс |
СУВ Заслон |
СУВ С-27 |
СУВ С-29 |
СУВ Копье |
СУВ Москит |
СУВ С-29М4 |
РЛПК Оса |
СУВ С-29С |
С-27К (С-29УМ) |
СУВ Сокол |
СУВ Барс |
|
| Истребитель |
МиГ-31 |
Су-27 |
МиГ-29 |
МиГ-21-93 |
МиГ-23-98 |
МиГ-29СМТ-1 |
МиГ-29УБТ, МиГ-21 |
МиГ-29С |
Су-33, Су-27КУБ (МиГ-29СМТ-2) |
Су-З0МК, Су-37 |
Су-З0МКИ, Су-30 МКМ |
|
| Тип антенны |
ФАР |
Кассегрена |
ЩАР |
ЩАР |
ЩАР |
ФАР |
ЩАР |
ЩАР |
ФАР |
ФАР |
||
| Дальность обнаружения целей, км. |
ППС |
180...200 |
100 |
70 |
57 |
90 |
90 |
85 |
70...80 |
110…130 |
170…180 |
150…200 |
| ЗПС |
60…80 |
40 |
40 |
25…30 |
40 |
40 |
40 |
35…50 |
40…65 |
60…80 |
60…80 |
|
| sц , м2 |
19 |
3 |
3 |
5 |
5 |
5 |
5 |
3 |
5 |
5 |
5 |
|
| Зона сопро-вождения, град. |
Азимут |
±70 |
±60 |
±60 |
±40 |
+ 60 |
±70 |
+ 60 |
±85 |
+ 85...90 |
±70 |
±70 |
| Угол места |
–60…+70 |
±60 |
–45 …+60 |
±40 |
±60 |
–40…+50 |
±60 |
–40…+55 |
–40… …+55(60) |
±70 |
±40 |
|
| Количество сопровождаемых целей |
10 |
10 |
10 |
8 |
10 |
10 |
8 |
10 |
10…20 |
24…30 |
15 |
|
| Число одновременно атакуемых целей |
4 |
1 |
1 |
2 |
2…4 |
2 |
4 |
2 |
2…4 |
6…8 |
4 |
|
| Средняя мощность передатчика, Вт |
2500 |
1000 |
1000 |
1000 |
1000 |
700 |
1200 |
1200…1500 |
2000 |
1200 |
||
| Потребляемая мощность, кВт |
31 |
8,5 |
8,5 |
3,6 |
8,5 |
12 |
12 |
|||||
| Масса, кг |
100…160 |
100 |
380 |
120 |
250 |
220…260 |
245 |
|||||
| Надежность, ч / отк. |
55 |
100 |
120 |
150 |
400…550 |
120 |
120…200 |
200 |
200 |
|||
Рис.1. Характеристики отечественных БРЛС
В 1989 г. начались работы над новой модификацией самолета - МиГ-21И. Только за счет оснащения МиГ-21 современным радиоэлектронным оборудованием, удалось достичь многократного повышения боевой эффективности по сравнению с последней модификацией МиГ-21БИС. МиГ-21И оснастили многофункциональной когерентной импульсно-доплеровской БРЛС “КОПЬЕ”, превосходящей по основным характеристикам американскую РЛС AN/APG-68, устанавливаемую на истребителях F-16C.

Рис.2. МиГ-21И
Бортовая РЛС Копье
Предназначена для вновь разрабатываемых и модернизируемых легких истребителей типа МиГ-21-93. Обеспечивает управление бортовым вооружением, включающим все его виды: пушки, неуправляемые ракеты, современные управляемые ракеты с тепловыми и радиолокационными головками самонаведения, в том числе активными, корректируемые бомбы.
“Копье”- когерентная, многофункциональная, многорежимная бортовая радио-локационная станция(БРЛС), обнаруживает и захватывает воздушные цели в свободном пространстве и на фоне земли в условиях облачности на встречных и догонных курсах. Использование БРЛС “Копье” превращает самолет МиГ- 21 в современный, многофункциональный истребитель- бомбардировщик 4- го поколения.
БРЛС “Копье” обеспечивает в режиме “воздух- воздух”: обнаружение цели с определением дальности; сопровождение одиночной цели и нескольких целей с сохранением обзора пространства; выбор наиболее опасной цели и атаку нескольких целей; ближний маневренный бой. В режиме “воздух- поверхность”: картографирование поверхности реальным лучом антенны; замораживание карты; обнаружение движущихся наземных целей; измерение дальности до наземных целей.
Основные характеристики:
Диапазон частот Х
Антенна: тип щелевая решетка
диаметр, мм 500
Дальность обнаружения целей, навстречу/вдогон, км:
в режиме «воздух - воздух» 57/30
на фоне земли 57/25
Количество одновременно сопровождаемых/обстреливаемых целей 10/2
Вероятность определения отказа системой встроенного контроля (непрерывный по вызову, сквозной в полете и на земле), проц. 95
Наработка на отказ, ч 200
Боевые возможности МиГ-21-93:
используемое оружие:
ракеты с ТГС Р60МК, Р-73Э
ракеты «воздух - корабль» Х-31А
ракеты с РГС для встречного боя на больших дальностях РВВ-АЕ, Р-27Р1(Т)
управляемые бомбы МК82, МК83, КАБ-500Кр
На самолете МИГ-21И установлена многофункциональная БРЛС Копье, позволяющая обнаруживать и поражать воздушные цели всех типов круглосуточно и в любых условиях, а также наземные цели, в том числе вне их визуальной видимости. При работе по земле, импульсно-доплеровская РЛС Копье обеспечивает всепогодность и круглосуточность применения самолета и выдачу предварительного целеуказания. Так, движущаяся по лесной дороге колонна танков обнаруживается на дальности свыше 20 км, железнодорожный мост - 100 км.
БРЛС Копье обеспечивает применение:
- УР класса воздух - воздух средней дальности - РВВ-АЕ, Р-27;
- УР класса воздух - воздух малой дальности - Р-60 (Р-60М), Р-73;
- УР класса воздух- РЛС - Х-25МП;
- корректируемых авиабомб - КАБ-500КР и др.
Система управления вооружением (СУВ) самолета истребителя МиГ-21
Бортовая радиолокационная станция «Копье-21» является основной частью системы управления вооружением (СУВ) самолета-истребителя МиГ21БИС. СУВ совместно с ракетным вооружением, бортовыми системами и другим оборудованием самолета обеспечивает:
· перехват воздушных целей на встречных, встречнопересекающихся и догонных курсах;
· ведение ближнего маневренного боя с использованием ракетного и пушечного вооружения;
· выдачу пилотажно-навигационной информации для взлета, полета по маршруту и посадки;
· получение разномасштабной радиолокационной карты местности;
· обнаружение наземных и морских целей, измерение их дальности и азимута;
· применение всех видов вооружения класса «воздух-поверхность»;
· автоматизированный контроль СУВ с выдачей непрерывной информации о работоспособности всех блоков.
Обеспечена возможность сопряжения с аналоговым и цифровым оборудованием, имеющимся на борту самолета, а также удобство управления и эксплуатации. По своим основным характеристикам РЛС Копье соответствует или несколько превосходит американскую РЛС Вестингауз AN-APG-68, устанавливаемую на самолетах Дженерал Дайнэмикс F-16C. В состав оборудования входят бортовая ЦВМ, нашлемная система целеуказания, система отображения информации, новая система управления оружием, аппаратура инерциальной курсовертикали, цифровая система воздушных сигналов, радиотехническая система ближней навигации (РСБН), бортовая аппаратура приема команд радионаведения по КРУ, новая кабинная аппаратура, система эл,ектроснабжения, контроля и регистрации. Структурная схема СУВ «Копье-21» представлена на рисунке 3.
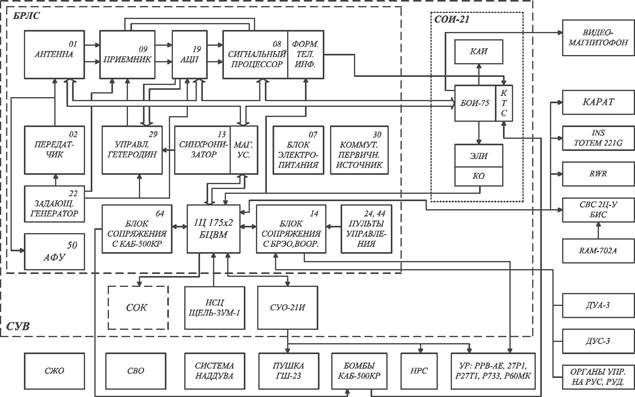
Рис.3. Структурная схема СУВ «Копье-21»
На схеме использованы следующие обозначения:
КАИ – коллиматорный авиационный индикатор на лобовом стекле кабины пилота;
СОИ-21 – система отображения информации;
БОИ – блок отображения информации – цифровой процессор, который обеспечивает отображение информации на ЭЛИ и КАИ;
КТС – коммутатор телевизионных сигналов;
ЭЛИ – электронно-лучевой индикатор на приборной панели;
КО – кнопочное обрамление ЭЛИ;
«КАРАТ» – бортовая автоматизированная система контроля (БАСК)
INS «TOTEM» – инерциальная курсовертикаль (измерение углов курса, крена, тангажа, составляющих абсолютной и относительной скорости на основе гироскопических датчиков) – инерциальная навигационная система;
RWR – система предупреждения об облучении самолета зенитными ракетными комплексами и РЛС истребителей противника;
СВС-2Ц-У – система воздушных сигналов – выдает значение воздушной скорости (по измерениям датчика воздушного давления – трубки Пито), барометрической высоты и температуры наружного воздуха, а также абсолютной высоты полета по показаниям радиовысотомера;
RAM-702A– радиовысотомер, измеряет высоту полета, предупреждает об опасном снижении;
ДУА-3 – датчик угла атаки;
ДУС-3 – датчик угла скольжения;
Оба датчика (ДУА и ДУС) являются аналоговыми потенциометрами, связанными с флюгерами.
РУС – ручка управления самолетом - рулевая колонка;
РУД – ручка управления двигателем (дросселем тяги);
Размещение органов управления (кнопок, переключателей, кнюппеля джойстика в форме кнопки) на РУС и РУД соответствуют концепции HOTAS - hands on throttle and stick - осуществление управления РЛС и оружием, не снимая рук с ручки дросселя и рулевой колонки.
НСЦ «Щель-Зум» – нашлемная система целеуказания – измеряет угловые координаты линии визирования цели, визуально наблюдаемой пилотом через визирную рамку;
СОК – система объективного контроля;
СУО-21И – система управления оружием (ракетным и стрелковым);
СЖО – система жидкостного охлаждения;
СВО – система воздушного охлаждения;
КАБ-500КР – корректируемая авиабомба с телевизионной головкой наведения;
НРС – неуправляемые ракетные снаряды;
УР – управляемые ракеты:
РВВ-АЕ – средней дальности с активной радиолокационной головкой самонаведения,
Р27Т1 – средней дальности с тепловой (инфракрасной) головкой,
Р73Э, Р73ТЭ, Р60МК – малой дальности с тепловыми головками,
Х25МП – противорадиолокационная (наводится на радиоизлучение).
- РВВ-АЕ – средней дальности с активной радиолокационной головкой самонаведения
- Р27Т1 – средней дальности с тепловой (инфракрасной) головкой
- Р73Э, Р73ТЭ, Р60МК – малой дальности с тепловыми головками
- Х25МП – противорадиолокационная (наводится на радиоизлучение)
Состав ракетного вооружения самолета МиГ-21 представлен на рисунке 4.

Рис.4. Ракетное вооружение «МиГ-21»
Режимы работы и параметры БРЛС Копье-21И
БРЛС «Копье-21» входит в состав системы управления вооружением и является многофункциональной РЛС, обеспечивающей решение боевых задач в трех основных режимах работы: «воздух-воздух», «воздух поверхность» и навигация.
В режиме «воздух-воздух» РЛС выполняет следующие задачи:
- Обнаружение целей с измерением дальности в свободном пространстве и на фоне земли (моря)
- Сопровождение одиночной цели
- Сопровождение до 8 целей с сохранением обзора: выбор двух наиболее опасных целей атака одновременно двух целей
Ближний маневренный бой:
- вертикальное сканирование в зоне индикатора на лобовом стекле
- ручное целеуказание цели (без сканирования) и целеуказание с помощью нашлемного визира
- поворачиваемое сканирование с помощью кнюппеля
В режиме «воздух-поверхность» имеет следующие подрежимы работы.
- Картографирование: а) реальным лучом, б) в режиме доплеровского обучения луча, в) синтезированной диаграммой направленности антенны.
- Укрупнение масштаба, «замораживание» карты.
- Измерение дальности до земли и до радиоконтрастных целей с целью коррекции навигационной системы.
- Обзор морской поверхности.
- Обнаружение и сопровождение движущихся наземных целей.
- Атака нескольких целей одновременно (до 4).
- Обнаружение и сопровождение постановщика активных помех.
В режиме «Навигация» РЛС обеспечивает: определение и выдачу значений крена, тангажа, магнитного и истинного курсов, составляющих относительной и абсолютной линейных скоростей, географических координат местонахождения и индикации координат наземных радиомаяков, промежуточных пунктов маршрута и аэродромов, вводимых с кнопочного обрамления на электронно-лучевом индикаторе (КО ЭЛИ).
Параметры антенны БРЛС «Копье-21»
тип – щелевая антенная решетка
диаметр антенны - 500 мм
встроенный компенсационный канал.
Зона сопровождения: по азимуту - ± 40 град., по наклону - ± 40 град.
зоны обзора: ±10/ ±20/ ±40 град
Коэффициент усиления - 29 дБ
Коэффициент шума - 4 дБ
Диапазон частот - X (3 см)
Кол-во литерных частот - 16
Мощность передатчика: импульсная - 5 кВт, средняя - 1 кВт.
Характеристики в режиме «воздух-воздух»:
- Дальность обнаружения целей с Sэпр = 5 кв.м:
в свободном пространстве навстречу - 57 км
в свободном пространстве в вдогон - 30 км
на фоне земли навстречу - 57 км
на фоне земли в вдогон - 20 км
- Дальность обнаружения по скорости целей с Sэпр = 5 кв.м. - 68 км
- Целеуказание управляемым ракетам РВВ-АЕ, Р-27Р, Р-27Э, Р-27Т, Р27АЕ, Р-73
Характеристики в режиме «воздух-поверхность»:
- Дальность обнаружения морских целей с Sэпр = 100 кв.м:
при волнении моря 0 баллов - 80 км
при волнении моря 4 балла - 50 км
- Целеуказание активным ракетам Х-31А, УРСам и авиабомбам.
- Обучение луча при картографировании: 20:1, 45:1, 90:1
- Разрешение при картографировании:
низкое (в зоне до 80 км) - 300х300 м
среднее (в зоне до 60 км) - 30х30 м
высокое (в зоне до 20 км) - 10х10 м
Масса и энергопотребление:
Масса - 115 кг
Потребляемая мощность:
по переменному току - 8.5 кВт
по постоянному току - 1 кВт
Напряжение питания:
переменное - трехфазное 200 В, 400 ± 8 Гц,
постоянное - 27 В.

Рис.5. Внешний вид БРЛС «Копье-21И»
Структурная схема БРЛС Копье-21И
Структурная схема БРЛС «Копье-21», показана на рисунке 6.
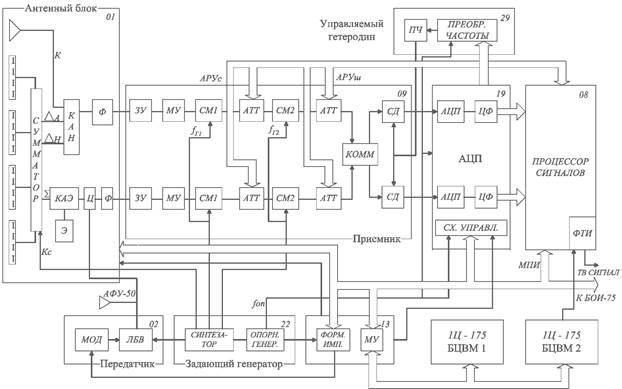
Рис.6. Структурная схема БРЛС «Копье-21»
В состав станции входят следующие блоки:
Антенный блок (блок 01), в котором для формирования основной диаграммы направленности используется плоская щелевая решетка с приводом по осям азимута и угла места. В антенный блок входят также компенсационная антенна (К), волноводный сумматор, переключатель каналов приема (КАН – Компенсационный-Азимутальный-Наклона), циркулятор прием-передача (Ц), коммутатор антенна-эквивалент (КАЭ) и полосовой фильтр (Ф). В плоской щелевой решетке антенного блока формируются суммарный сигнал диаграммы направленности (S) и разностные сигналы азимута – DА и угла места (наклона) – DН для моноимпульсного метода пеленгации целей.
Суммарный канал подключается через циркулятор ко входу первого канала приемника. Ко входу второго канала приемника через переключатель (КАН) подключаются разностные сигналы DА и DН или выход антенны компенсационного (К). Антенна компенсационного канала имеет широкую диаграмму направленности, перекрывающую боковые лепестки основной антенны. В зависимости от соотношения сигналов суммарного и компенсационного каналов для каждого элемента разрешения по дальности и частоте выносится решение о наличии помехи» этом элементе и его «отбраковке». То есть, когда сигнал компенсационного канала превышает сигнал основного, элемент разрешения считается пораженным помехой и во внимание не принимается.
Передатчик (блок 02) осуществляет усиление СВЧ мощности и содержит усилитель на лампе бегущей волны, модулятор, высоковольтный выпрямитель, схемы контроля и защиты от нарушений работы ЛБВ, систем жидкостного охлаждения и наддува.
Задающий генератор (блок 22) формирует сигнал несущей частоты для передатчика, сигналы гетеродинных частот для приемника (блок 09) и сигнал опорной частоты для аналого-цифрового преобразователя (блок 19). Задающий генератор содержит кварцевый генератор и синтезатор частот, управляемый по информации, поступающей из БЦВМ (1Ц175) через блок 13, и обеспечивающий электронную перестройку несущей частоты передатчика и частоты первого гетеродина приемника. Часть мощности задающего генератора ответвляется и передается на антенну для формирования контрольного сигнала (Кс). В задающем генераторе обеспечивается амплитудная и фазовая модуляции сигнала несущей частоты РЛС, частоты подсвета и радиокоррекции ракет.
Двухканальный приемник (блок 09) с двойным преобразованием частоты, содержит малошумящие транзисторные усилители с защитным устройством, аттенюаторы, коммутатор каналов и синхронные детекторы.
Управляемый гетеродин (блок 29) уменьшает влияние помех от земли путем переноса частоты отраженного помехового сигнала на нулевую частоту. Частота гетеродина управляется БЦВМ через блок 19 совместно с сигналом перестройки блока 13.
Аналого-цифровой преобразователь (блок 19) содержит два АЦП и схемы управления. Каждый из АЦП преобразует сигнал, поступающий с синхронного детектора приемника, и выдает результат преобразования в виде 16-ти разрядного двоичного слова в процессор сигналов (блок 08). Частота преобразования – 14 МГц. Первоначальная разрядность преобразования – 10 (в более поздних изделиях – 12 разрядов), однако во всех режимах кроме режима воздух-поверхность, в котором излучается сигнал, модулированный по фазе кодом Баркера, после АЦП осуществляется предварительное суммирование от 2 до 16 соседних отсчетов. Предварительное суммирование, эквивалентное применению фильтра НЧ, снижает скорость выдачи информации на процессор сигналов и повышает эффективную разрядность квантования до 13-14.
Блок 19 в соответствии с информацией, поступающей от БЦВМ (1Ц175), обеспечивает временное стробирование принятого сигнала а АЦП и формирование импульса запуска передатчика.
Процессор сигналов (блок 08) предназначен для обработки радиосигналов в режимах «воздух-воздух» и «воздух-поверхность». Процессор выполняет сжатие фазоманипулированных сигналов, доплеровскую фильтрацию, пороговую обработку и другие необходимые операции обработки радиолокационных сигналов. Кроме того, узел формирования телевизионного изображения (ФТИ), размещенный в блоке 08, выдает телевизионный видеосигнал в систему индикации при картографировании.
Синхронизатор (блок 13) вырабатывает модулирующие импульсные сигналы передатчика, в том числе для линии радиокоррекции ракет и сигнал перестройки управляемого гетеродина. В состав блока конструктивно входит усилитель мощности цифровых сигналов магистрального параллельного интерфейса (МПИ).
БЦВМ (1Ц175-1 и 1Ц175-2) осуществляют обработку данных, получаемых из процессора сигналов, управляют работой блоков БРЛС по магистральному параллельному интерфейсу, получают и выдают информацию бортовым системам самолета.
Электропитание блоков БРЛС осуществляется от источника вторичного электропитания (блок 07). Коммутатор первичного электропитания (блок 30) обеспечивает включение БРЛС от трехфазной сети 200В, 400Гц и постоянного напряжения +27В, защиту блоков БРЛС по току потребления, а также по исправности систем жидкостного охлаждения и наддува.
Антенно-фидерное устройство АФУ-50 предназначено для передачи СВЧ сигнала от ответвителя блока 01 к различным радиолокационным головкам самонаведения, то есть служит для контроля РГС на подвеске, и расположено на фюзеляже и крыльях самолета.
Система отображения информации состоит из
- электронно-лучевого индикатора (ЭЛИ) с кнопочным обрамлением (КО),
- коллиматорного авиационного индикатора (КАИ), формирующего радиолокационное изображение целей на лобовом стекле кабины пилота,
- блока формирования изображений (БОИ-75) на ЭЛИ и КАИ.
Размещение блоков БРЛС на борту самолета МиГ-21 показано на рисунке 7.
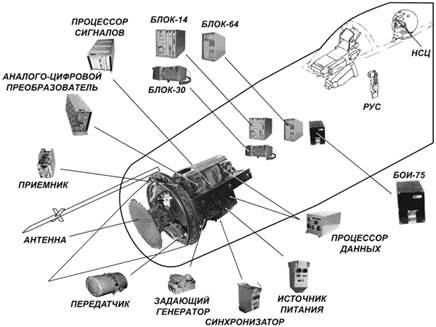
Рис.7. Размещение блоков БРЛС «Копье-21»
Внешний вид кабины пилота истребителя «МиГ-21», расположение органов управления РЛС и устройств отображения информации показаны на рисунке 8.

Рис.8. Расположение устройств управления и отображения информации БРЛС «Копье-21» в кабине пилота
![]() Дальнейшее совершенствование БРЛС и теплопеленгаторов связано в основном с бурным развитием электроники и совершенствованием математического аппарата. В первую очередь сигнальные процессоры с жесткой архитектурой начали заменять на программируемые сигнальные процессоры (ПСП). Впервые ПСП был установлен на БРЛС APG-65 истребителя F/A-18. С середины 80-х годов ПСП заменяет старые сигнальные процессоры в БРЛС APG-63 и разрабатывается ПСП для перспективного истребителя программы ATF. Применение ПСП позволило применять один (или группу) процессор для различных задач, в том числе связи, навигации и значительно расширить возможности БРЛС. В первую очередь рост производительности ПСП с быстрым преобразованием Фурье отражается на способности БРЛС различать сигналы от цели в более широком спектре в режиме реального времени. Практическим применением стало беззапросное определение гос. принадлежности и распознавание типа обнаруженной цели. Информационными признаками распознавания являются флуктуации отраженного сигнала в широком диапазоне. Измерение спектра и амплитудной характеристики флуктуаций позволяет сравнить характер отраженного сигнала с имеющимися в базе данных, и с высокой вероятностью опознать тип цели. Вторым применением можно считать расширение возможностей БРЛС в режиме Воздух-Земля, например повышение разрешающей
Дальнейшее совершенствование БРЛС и теплопеленгаторов связано в основном с бурным развитием электроники и совершенствованием математического аппарата. В первую очередь сигнальные процессоры с жесткой архитектурой начали заменять на программируемые сигнальные процессоры (ПСП). Впервые ПСП был установлен на БРЛС APG-65 истребителя F/A-18. С середины 80-х годов ПСП заменяет старые сигнальные процессоры в БРЛС APG-63 и разрабатывается ПСП для перспективного истребителя программы ATF. Применение ПСП позволило применять один (или группу) процессор для различных задач, в том числе связи, навигации и значительно расширить возможности БРЛС. В первую очередь рост производительности ПСП с быстрым преобразованием Фурье отражается на способности БРЛС различать сигналы от цели в более широком спектре в режиме реального времени. Практическим применением стало беззапросное определение гос. принадлежности и распознавание типа обнаруженной цели. Информационными признаками распознавания являются флуктуации отраженного сигнала в широком диапазоне. Измерение спектра и амплитудной характеристики флуктуаций позволяет сравнить характер отраженного сигнала с имеющимися в базе данных, и с высокой вероятностью опознать тип цели. Вторым применением можно считать расширение возможностей БРЛС в режиме Воздух-Земля, например повышение разрешающей  способности при картографировании местности и распознавание движущихся целей (наземных, с относительно низкой скоростью). Все эти задачи требуют в первую очередь быстродействующих сигнальных процессоров и БЦВМ с большим объёмом запоминающего устройства, быстродействием и повышенной пропускной способностью шины. Дальнейшее совершенствование БРЛС можно связать с освоением ФАР и АФАР. Уникальные возможности АФАР по формированию сложной и многолепестковой диаграммы направленности с одновременной работой на разных частотах позволяет интегрировать многие радиолокационные системы – БРЛС, запросчики гос.опознавания, системы связи, навигации и КРЭП (комплекс радиоэлектронного противодействия). Таким образом, переспективный бортовой комплекс будет совмещать в себе множество функций и строиться не по федеративному принципу (множество независимых систем общающихся непосредственнос БЦВМ), а как единая многофункциональная система, гибко изменяющая свою архитектуру в зависимости от текущих требований. Первым шагом на пути создания подобной системы можно назвать бортовой комплекс истребителя F-22 Raptor (созданный в результате упомянутой программы ATF) построенный на базе БРЛС APG-77 с АФАР.
способности при картографировании местности и распознавание движущихся целей (наземных, с относительно низкой скоростью). Все эти задачи требуют в первую очередь быстродействующих сигнальных процессоров и БЦВМ с большим объёмом запоминающего устройства, быстродействием и повышенной пропускной способностью шины. Дальнейшее совершенствование БРЛС можно связать с освоением ФАР и АФАР. Уникальные возможности АФАР по формированию сложной и многолепестковой диаграммы направленности с одновременной работой на разных частотах позволяет интегрировать многие радиолокационные системы – БРЛС, запросчики гос.опознавания, системы связи, навигации и КРЭП (комплекс радиоэлектронного противодействия). Таким образом, переспективный бортовой комплекс будет совмещать в себе множество функций и строиться не по федеративному принципу (множество независимых систем общающихся непосредственнос БЦВМ), а как единая многофункциональная система, гибко изменяющая свою архитектуру в зависимости от текущих требований. Первым шагом на пути создания подобной системы можно назвать бортовой комплекс истребителя F-22 Raptor (созданный в результате упомянутой программы ATF) построенный на базе БРЛС APG-77 с АФАР.
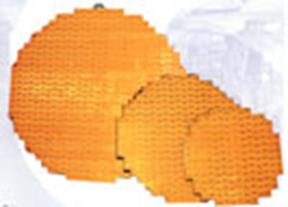

Рис.10. Щелевая(ЩАР) и фазированная(ФАР) антенные решетки для БРЛС
Совершенствование теплопеленгаторов и систем ночного видения идёт в нескольких направлениях. Для пассивного обнаружения и скрытного сопровождения целей совершенствуется приёмник ИК излучения с двумерными матрицами чуствительных элементов. Ключевыми моментами разработок различных фирм стали быстродействие и расширение спектра детектируемых сигналов. Решения базируются на использовании детекторов на основе сплавов кадмий-теллур-ртуть (чуствительного к ИК излучению в диапазоне 1 – 12 мкм), применение двухслойных матриц и оптимизация методов считывания сигнала. Первый слой матрицы является собственно мозаичным детектором, второй представляет собой мультиплексор считывающий показания каждого детектора и преобразующий их в цифровую форму. Помимо обнаружения и сопровождения целей в воздушном бою, на ИК станции может быть возложена задача предупреждения о пуске ракет. Уже созданы образцы ИК систем контроля за воздушным пространством с круговым обзором. Вспышка пуска раеты детектируется на дальности до 10км, что достаточно для принятия мер по уклонению и противодействию. Помимо выброса тепловых ловушек, противодействие заключается в постановке модулированных помех в ИК спектре в том числе и прицельно, при помощи лазерного излучения.
Используемые сайты:
1. http://www.phazotron.com/military.parts.html
2. http://armies.biz/avia/mig21.htm
3. http://www.warfare.ru/?lang=ruslinkid=2422catid=334
4. http://kaf401test.rloc.ru/articles/5/28/
5. http://avia-museum.narod.ru/russia/mig-21_add.html
6. http://www.rusarmy.com/forum/viewtopic.php?t=1469
7. http://radar.narod.ru/rdr-ap-ra.html#r63
8. http://www.snariad.ru/istrebiteli/mig-21#high_1
9. http://world-air.narod.ru/html/mig21-93.html
10. http://airbase.ru/hangar/equipment/radars/rlz/
Добавление сайта в поисковики
http://www.rambler.ru/doc/add_site.shtml
http://www.yandex.ru/addurl.html
http://aport.ru/addurl.php
http://artemafiles.land.ru/addsite.html