Налагоджування та програмування промислового робота МП-9С
СОДЕРЖАНИЕ: Основні системи у складі промислового робота: виконавча (рушійна), керуюча (інтелектна), інформаційно-вимірювальна (сенсорна) та система звязку. Налагоджування та програмування робота, основні режими роботи. Розробка програми для виконання операцій.Лабораторна робота
Тема: Налагоджування та програмування промислового робота МП-9С
Мета роботи: Отримати навички налагоджування та програмування промислового робота.
Обладнання та пристрої:
1. Промисловий робот М.1І-9С.
2. Набір деталей.
У загальному випадку робот складається з 4 систем: виконавчої (рушійної), керуючої (інтелектної), інформаційно-вимірювальної (сенсорної) та системи звязку.
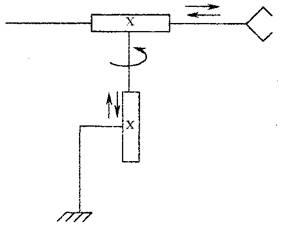
Рис.2.1 Кінематична схема робота МП-9С
На маніпулятор подається напруга постійного струму 24±2,4 В від пристрою управління, що підключений до мережі змінного струму напругою 220 В. В маніпуляторі на кожний рух, крім захвата, встановлено два електропневматичних клапана, оснащених дроселями, регулювання яких дозволяє змінювати швидкість руху по кожній координаті. Позиціювання маніпулятора виконується по кінцевим регулюємим упорам.
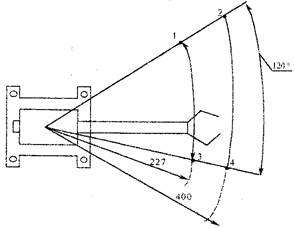
Рис.2.2 Робоча зона робота
промисловий робот програма налагоджування
Послідовність і кількість рухів маніпулятора відповідно до прийнятої технологічної схеми встановлюється вводом програми з пульта керування.
Сигнал про виконання кожного руху маніпулятора видають контакти магнітокеруємі електричні при наближенні до цих постійних магнітів, встановлених на рухомих частинах.
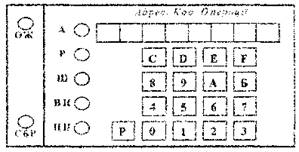
Рис.2.3 Пульт керування робота
Основними режимами роботи ПК є:
1. Автоматичний (режим „А”) - робота під керуванням записаної у память програми.
2. Ручний (режим „Р”) - робота по командам, що задаються з пульта керування вручну.
3. Кроковий (режим „Ш”) - крокове виконання програми. Після кожного виконання команди робота ПК зупиняється.
4. Ввід програми (режим „ВП”) - запис у память робочих програм, що вводяться з пульта керування.
5. Перегляд програми (режим „ПП”) - вивід складових робочих програм на одностроковий дисплей.
6. Функціональна клавіатура (режим „Ф” з додатковою індикацією на дисплеї).
Індивідуальне завдання
Скласти програму для виконання наступних операцій:
Захопити деталь в т.1, перемістити в т.4 і залишивши її повернутись в т.1.
Розробка програми подана у таблиці:
| Формат команди | Клавіші | Дія, що виконується |
F400 F100 F300 FA00 F500 FБ00 F400 F000 F200 F500 FА00 F400 F100 F300 |
4 1 3 А 5 Б 4 0 2 5 А 4 1 3 |
Підняття Втягування руки Поворот вліво Розтискання схвата Опускання Стискування схвата Підняття Висування руки Поворот в право Опускання Розтискання схвата Підняття Втягування руки Поворот вліво |
Висновок: на даній лабораторній роботі ми отримали навички налагодження та програмування промислового робота. Також дійшли висновку, що використання такого промислового робота МП-9С та технологічного обладнання з ЧПК дозволяє оперативно переходити з однієї операції на іншу, дає можливість комплексної автоматизації дрібносерійного та серійного виробництва, що характеризуються великими об’ємами та широкою номенклатурою продукції, яка випускається, а також підвищити продуктивність виробництва.