Обоснование параметров рабочего органа для выкапывания моркови
СОДЕРЖАНИЕ: Физико-механические свойства моркови. Устройство для извлечения корнеплодов, использующее деформации растяжения и сдвига. Длина передней части копателя. Возделывание корнеплодов по астраханской технологии. Расчет кинематических параметров копателя.Реферат
На тему
Обоснование параметров рабочего органа для выкапывания моркови
Введение
Физико-механические свойства моркови, а, именно, малая прочность корнеплодов при изгибающих воздействиях накладывают определенные ограничения на выкапывающие органы машин.
В основу выжимных рабочих органов современных машин положено взаимодействие на корнеплод двух спаренных трехгранных клиньев [1]. При этом на корнеплод действуют силы: (рис 1)
- горизонтальные Р, действующие в плоскости, перпендикулярной направлению движения машины и образуемые боковым давлением;
- выжимающая Рв, направленная вертикально вверх;
- сдвигающая Рс, действующая в направлении движения машины.
Силы Р и Рв разрушают почвенные комки и извлекают корнеплоды из почвы. Сдвигающая сила, действующая на пласт почвы с корнеплодами, складывается из проекции на направление движения элементарных нормальных сил, действующих со стороны копачей и элементарных сил трения образующихся при перемещении рабочей поверхности копачей относительно почвы.
Изломы корнеплодов будут наименьшими, если сумма сдвигающих сил, действующих на пласт почвы с корнеплодами, будет равна нулю.
Экспериментальные исследования ряда авторов [2] показывают, что наибольшее сопротивление почва оказывает при ее деформации за счет сжимающих сил. Почти все почвы (кроме луго-болотной дернины) имеют предел прочности на сжатие в 6…10 раз больше, чем на срез и в 10…30 раз больше чем на разрыв.
Это и выявляет необходимость производить крошение почвы за счет применения деформации растяжения или изгиба.
Исходя из указанных соображений, нам предложен способ и устройство для извлечения корнеплодов, используя деформации растяжения и сдвига.
Предложенное устройство состоит из активного лемеха по а.с. № 1271409, на который устанавливается выкапывающее устройство.
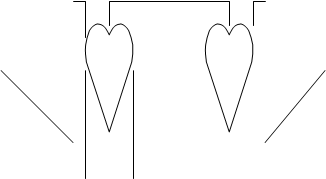
Выкапывающее устройство рис. 2 состоит из двух частей, имеющих различное назначение.
Передняя часть выкапывающего устройства образована двумя двухгранными клиньями, которые на всей длине образуют русло постоянного сечения. Эта часть выкапывающего устройства служит для отделения корненосного пласта от основного массива.
Задняя часть копателя, образованная двумя трехгранными клиньями представляет собой суживающееся русло. Эта часть копателя служит для подъема и транспортирования корненосного пласта к сепарирующим рабочим органам.
Устройство работает следующим образом.
При движении шатуна 6, работающей машины вперед, рабочий орган также движется вперед, вызывая поворот тяги 5, при этом нижний конец тяги поднимается и через кронштейн 4 поворачивает рабочий орган на задний угол вниз, заглубляя, копачи в почву. Во время движения копача вперед, передняя часть копача врезается в массив и вырезает с двух боковых сторон призму длиной L.
Двигаясь в обратном направлении, выкапывающее устройство поднимается и поворачивается вверх, производя при этом отрыв корненосного пласта от основного массива по плоскости а1в1с1d1 и с1с2d2d1.
При следующем движении копателя вперед передняя часть копателя вновь врезается в массив и вырезает с двух боковых сторон призму длиной L, а задняя часть копателя производит подъем и транспортировку отделенной ранее призмы в сужающемся русле.
1. Ширина захвата
В овощеводческих хозяйствах морковь высевается по схеме 0.08 + 0.62 м.
![]()
![]() В
В
![]() m
d
1
m
m
d
1
m
![]()
![]()
![]() d
d
![]()
![]() В общем случае ширина захвата определяется по формуле
В общем случае ширина захвата определяется по формуле
В = в1 + d + 2m, (1)
где в1 – расстояние между центрами корнеплодов в разных сторонах ленты, м;
d – диаметр корнеплода, м;
m– защитная зона, м.
Расстояние между центрами корнеплодов в разных строках ленты и диаметры корнеплодов определялись в течении 4 лет на полях совхоза «Родина», «Правда», «Металлург», «Ижевский» и имеет следующие значения:
В1 = 0.15…0.17 м
D = 0.026…0.034 м
При возделывании корнеплодов по астраханской технологии устанавливаются на переоборудованный картофелеуборочный комбайн щелеватель направитель из комплекта дополнительного оборудования в соответствии с технологией. В этом случае защитная зона устанавливается в пределах m = 0.03…0.05 м.
2. Длина передней части копателя
Длина передней части копателя должна быть равна величине абсолютного перемещения его при движении комбайна и кривошипа вперед.
L = 2*Vм*t + X1 (2)
X1 = L4*Cos + L7*Cos (3)
= 180° - arctg (2 – L4*Sin 4)/(- X2 – L4 * Cos 4) + arcos((X2 + L4 *
Cos 4) + (y2 – L4 * Sin 4) + L6 - L5)/(2*L6((X2 + L4 * Cos 4) + (y2 – L4*Sin 4))) (4)
4 = arccos (X1- L2* Cos 2)/(((X1 – L2 * Cos 2) + (y1 + L2 * Cos 2))) – arccos (L3 - L4 - (X1 – L2 * Cos 2) + (y1+ L2 * Cos 2)/(2 * L4((X1 – L2 * Cos 2) + (y1 + L2 * Cos2))) (5)
2 = * t
Подставляя значения X1 в уравнение (2) определяем длину первой части копателя.
3. Длина задней части копателя
Вторая часть копателя выполняет функцию перемещения корненосного пласта, в связи с этим важно определить параметры копателя, при которых обеспечивается устойчивое перемещение почвы без сгруживания по поверхности копачей.
Динамика перемещения пласта почвы по поверхности двугранного клина впервые была рассмотрена доктором технических наук Г.Н. Синеоновым.
Им была получена аналитическая зависимость для определения максимально допустимой длины лемеха, при котором перемещения почвы будет переходить без сгруживания.
L ctg ( + ) {(c/об) – 2(V/g) * Sin (/2) * [ Cos (/2) * tg( + ) –
Sin (/2)]}, (6)
где L – допустимая длина лемеха, м;
– угол установки лемеха, град;
– угол трения почвы о поверхность лемеха, град;
с – временное сопротивление почвы сжатию, кН/м;
об – объемный вес почвы, кН/м;
V – скорость перемещения лемеха, м/с;
g-- ускорение земного притяжения, м/с.
Эксперименты д. т. н. А.Н. Зеленина и к. т. н. Н.Ф. Диденко показывают, что временное сопротивление почвы сжатию является функцией твердости почвы . По данным Н.Ф. Диденко, в интервале твердости почвы 0…30 кН/м с достаточной точностью можно считать с = 0.007 .
Для спаренных трехгранных клиньев уравнение может быть записано:
L ctg ( + ) {((0/007/об) – (2V/g) * Sin (/2)[Cos (/2) * tg ( + ) –
Sin (/2)])} (7)
где = arctg (tg/Sin (/2))
где – угол максимального раскрытия.
Подставляя в уравнение (7) его составляющие определяем длину задней части копателя.
4. Определение угла установки передней части копателя
 |
![]()
![]() N
N
![]()
![]() F
тр
F
тр
 G
G
Для определения угла составим уравнение отрыва пласта по поверхности двух плоскостей а1в1с1 и с1d1c2d2.
Запишем уравнение отрыва корненосного пласта. Сила трения пласта по поверхностям передней части копателя должно быть больше сил сопротивления.
Fтр Р отрыва + Р сдв + G, (8)
где Р отрыва – усилие, необходимое для отрыва корненосного пласта по плоскости с1d1c2d2. Р сдв – усилие, необходимое для преодоления сдвига пласта в плоскости а1в1с1d1. G – вес отделяемой части корненосного пласта.
Р отрыва = * Fc1d1c2d2 (9)
Рсдв = * F a1b1c1d1 (10)
F тр = 2*f*G*tg(11)
Отсюда угол установим в передней части копателя к горизонтальной плоскости
tg = (P отр + Р сдв +G)/2*f*G(12)
5. Расчет кинематических параметров копателя
Перемещение носка копателя в продольно вертикальной плоскости определяется по формуле
Y = L4*Sin 4 + L7*Sin (13)
Перемещение носка лемеха в горизонтальной плоскости определяется по формуле
X = L4*Cos 4 + L7 * Cos (14)
Литература
1. Н.Ф. Диденко и др. Машины для уборки овощей – М.: Машиностроение, 1984 – 320 с.
2. А.Н. Гудков. Теоретические положения к выбору новой системы машин для обработки почвы. Земледельческая механика. Сборник трудов. Том 12- М.: Машиностроение. 1969.
3. Ю.Г. Корепанов, А.А. Сорокин. Выкапывающий рабочий орган корнеуборочной машины. Авторское свидетельство СССР № 1271409 кл А01Д15/04.