Процесс моделирования работы коммутационного узла
СОДЕРЖАНИЕ: Измерительная часть устройства автоматического управления. Преобразователи типов сигналов (температуры в напряжение, напряжение в ток), усилитель сигнала, фильтр низкой частоты для борьбы с синфазной помехой. Структурная схема измерительной части.Министерство образования и науки Республики Казахстан
Павлодарский государственный университет им.С. Торайгырова
Факультет физики, математики и информационных технологий
Кафедра вычислительной техники и программирования
КУРСОВОЙ ПРОЕКТ
Пояснительная записка
КП.370140.1805.32.05. ПЗ
Тема: Процесс моделирования работы коммутационного узла
Ст. преподаватель В.Ю. Игнатовский
Нормоконтролер: Студент:
Заведующий кафедрой Потапенко О.Г.
2006
Задание
Основной целью курсового проекта является разработка системы получения информации о температуре с минимальными допустимыми потерями. Поставленная цель достигается анализом способов необходимого преобразования сигнала, подбором наиболее рациональных вариантов обработки сигнала, формулированием требований к схемотехническим решениям.
В зависимости от варианта, возможный порядок выполнения курсового проекта выглядит как поочередное решение задачи:
выбор структурной схемы, выбор параметров сигнала на входах и выходах элементов структурной схемы, составление баланса погрешностей
выбор схемы и расчет измерительного преобразователя сопротивления в напряжение
выбор схемы и расчет источника стабильного тока
выбор схемы и расчет частотного фильтра
определение суммарной погрешности и мероприятий для уменьшения погрешности
выбор схемы и расчет формирователя выходного сигнала
составление принципиальной схемы системы обработки сигнала.
При решении задач следует рассматривать все возможные варианты реализации, однако к рассмотрению принимать наиболее целесообразные. Системный анализ и экономические расчеты для сопоставления равноценных вариантов допускается не производить с целью ограничения объема выполняемых работ.
Исходные данные к проекту:
1) допустимая погрешность 1%;
2) устройство удаленно от объекта на 95м;
3) уровень синфазной помехи составляет 3.2 В;
4) диапазон измерения температуры составляет ![]() ;
;
5) выходной сигнал ![]() в диапазоне
в диапазоне ![]() мА;
мА;
6) датчик 50M, от ![]() до
до![]() С, опрос каждые 4.5 секунды.
С, опрос каждые 4.5 секунды.
Содержание
Введение
1. Структурная схема измерительной части
2. Выбор схемы и расчет ПСН
2.1 Схема ПСН
2.2 Расчет ПСН
2.3 Определение погрешностей ПСН
3. Выбор схемы и расчет источника стабильного тока для ПСН
3.1 Выбор схемы источника стабильного тока
3.2 Расчет источника стабильного тока
3.3 Определение погрешностей источника стабильного тока
4. Выбор схемы и расчет измерительного усилителя
4.1 Выбор схемы измерительного усилителя
4.2 Расчет измерительного усилителя
4.3 Определение погрешностей измерительного усилителя
5. Выбор схемы и расчет фильтра низкой частоты
5.1 Определение желаемых параметров фильтра
5.2 Определение реальных параметров фильтра
5.3 Выбор схемы фильтра и его расчет
5.4 Определение погрешностей фильтра
6. Выбор схемы и расчет ПНТ
6.1 Выбор схемы ПНТ
6.2 Расчет ПНТ
6.3 Определение погрешностей ПНТ
7. Расчет источника питания
7.1 Выбор схемы и расчет стабилизатора напряжения
7.2 Выбор и расчет выпрямителя напряжения
7.3 Выбор и расчет трансформатора
8. Проверка общей погрешности
Заключение
Список использованных источников
Введение
Одной из характерных черт научно-технической революции является дальнейшее совершенствование средств и систем комплексной автоматизации различных процессов. Разработка и проектирование современных средств и систем - базируется на достижения в различных областях науки и техники, в том числе и в области автоматического регулирования и управления
Задача разработки систем автоматического регулирования и систем управления состоит в том чтобы, располагая некоторыми априорными сведениями об объекте и заданными требованиями к свойствам всей системы в целом (точность, надежность и т.д.), выбрать технические средства (а в случае необходимости сформулировать технические условия на разработку новых средств автоматики) и составить схему системы, обеспечивающую реализацию этих требований.
Измерительные устройства в системах управления служат для восприятия первичной информации о состоянии управляемого объекта и преобразования ее в сигналы, удобные для их последующей переработки в сигналы управления.
В современных системах управления измерительные устройства часто представляют собой сложные системы, содержащие ряд преобразователей, усилителей, корректирующих цепей, следящих систем и вычислительных устройств.
Основное требование, предъявляемое к измерительному устройству, состоит в том, чтобы он формировал полезный сигнал с минимальными искажениями.
Последние могут вызываться как динамическими и статическими свойствами измерительного устройства, так и влиянием на его работу помех и шумов.
Очень важной характеристикой измерительного устройства в системах управления является его точность, так как очевидно, что точность управления не может быть выше, чем точность измерения.
На точность измерения влияют точность датчиков, элементов преобразующих сигнал этих датчиков, а также большое значение имеет уровень помех. Основными видами помех являются помехи синфазные и дифференциальные. Синфазная помеха отличается от дифференциальной тем, что воздействует одновременно на оба входа измерительного устройства.
Основными причинами появления синфазных помех являются:
1) Влияние ближнего электромагнитного поля;
2) Появления разности потенциалов из-за заземления в двух разных точках….
Существует несколько основных направлений, позволяющих снизить влияние синфазных помех на точность измерения. Это увеличение входного сопротивления, симметрирование входных цепей, применение операционных усилителей с большим сопротивлением синфазному напряжению и применение гальванической развязки и др.
В данной курсовой работе требуется разработать измерительную часть устройства автоматического управления. Эта часть состоит из двух преобразователей типов сигналов (температура в напряжения, напряжения в ток), усилителя сигнала, а также фильтра низкой частоты, необходимого для борьбы с синфазной помехой.
1. Структурная схема измерительной части
Структурная схема
 |
|
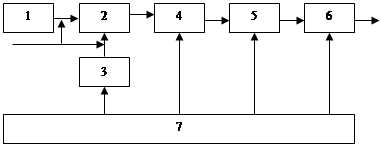
Рисунок 1 - Структурная схема измерительной части
Описание составных частей структурной схемы
Структурная схема представлена на рисунке 1, где:
1 - датчик температуры 50M, необходим для преобразования температуры в сопротивление:
его сопротивление при измеряемой температуре ![]()
![]()
2 - преобразователь сигнала датчика в напряжения (ПСН);
3 - источник тока для ПСН;
4 - измерительный усилитель:
напряжение входного сигнала равно напряжению на выходе ПСН.
Напряжение синфазной помехи (по заданию) равно 3.5В, напряжение выходного сигнала принимаем 1В;
5 - фильтр низкой частоты (необходим для ослабления синфазной помехи до уровня, который нам необходим - принимаем, что будет вполне достаточно уровня в 0,01% от общей погрешности):
напряжение входного сигнала равно напряжению на выходе ПСН, напряжение синфазной помехи равно напряжению синфазной помехи с учет ослабления на измерительном усилителе, в качестве частоты синфазной помехи принимаем частоту промышленной сети ![]() , опрос датчика ведется каждый 6 секунд;
, опрос датчика ведется каждый 6 секунд;
6 - ПНТ (необходим для преобразования напряжения в ток):
входное напряжение ПНТ равно выходному напряжению измерительного усилителя, ток на выходе (по заданию) ![]() ;
;
7 - источник питания схемы измерительного устройства:
он должен обеспечивать двуполярное напряжение ![]() с допустимым коэффициентом пульсаций
с допустимым коэффициентом пульсаций ![]() при входном напряжении переменного тока 220В.
при входном напряжении переменного тока 220В.
Для расчета погрешностей принимаем, что около 50% погрешности будет на измерительном усилителе, на фильтре около 10%, а остальная погрешность поровну распределиться по остальным узлам схемы.
2. Выбор схемы и расчет ПСН
2.1 Схема ПСН
В качестве схемы преобразователя сопротивления в напряжение принимаем четырехпроводный ПСН рисунок 2
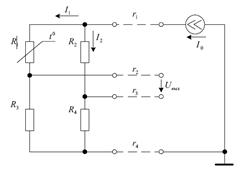
Рисунок 2 - ПСН
2.2 Расчет ПСН
Напряжение на выходе схемы ПСН будет равно:
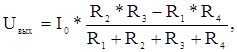 (1)
(1)
где ![]() - напряжение на выходе ПСН;
- напряжение на выходе ПСН;
![]() - потребляемый мостом ток;
- потребляемый мостом ток;
![]() - сопротивления плеч моста;
- сопротивления плеч моста;
![]() - сопротивления соединительных проводов.
- сопротивления соединительных проводов.
Сопротивления плеч моста подбираются с учетом следующего соотношения:
![]() (2)
(2)
![]() Ом;
Ом; ![]() Ом;
Ом; ![]() Ом;
Ом;
Сопротивления берем по ряду Е96 с точностью ![]()
Основное ограничение на параметры данной схемы накладывает мощность, рассеиваемая на термосопротивлении (принимается ![]() mВт):
mВт):
![]() (3)
(3)
С учетом данного ограничения рассчитываем ток ![]()
![]() :
:
 (4)
(4)
Для удобства расчета примем ![]() ;
;
Так как плечи моста находятся в равновесии (т.е. выполнятся условие (2)), то общий ток, который потребляется мостом равен:
![]() (5)
(5)
где![]() - ток потребляемый по второму плечу моста (
- ток потребляемый по второму плечу моста (![]() ).
).
Напряжение на выходе схемы ![]() будет равно (1):
будет равно (1):

2.3 Определение погрешностей ПСН
Далее рассчитываем погрешность ПСН. Она будет состоять из погрешности неточности сопротивлений:
 (7)
(7)
где![]() - погрешность от неточности сопротивлений;
- погрешность от неточности сопротивлений;
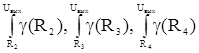
- функции чувствительности соответственно для отклонения ![]() .
.
Функция чувствительности для сопротивления ![]() находиться по формуле:
находиться по формуле:
 (8)
(8)
аналогично для сопротивлений ![]() и
и ![]() :
:
 (9)
(9)
 (10)
(10)
Погрешность от неточности сопротивлений находим из (7) подстановкой (8), (9) и (10):
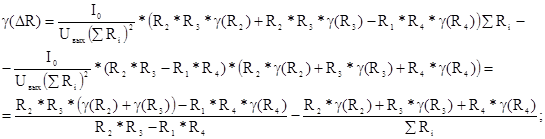
Для вычисления максимальной погрешности принимаем, что
![]()
Тогда формула для определения погрешности принимает вид:
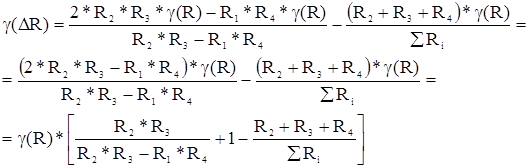 ; (11)
; (11)
Вычисляем погрешность от неточности сопротивлений:

3. Выбор схемы и расчет источника стабильного тока для ПСН
3.1 Выбор схемы источника стабильного тока
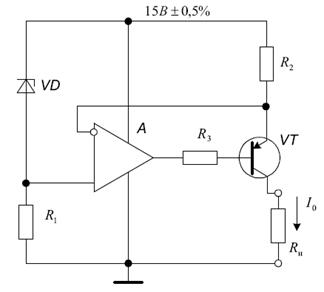
Рисунок 3 - Источник стабильного тока
3.2 Расчет источника стабильного тока
Определяем наибольшее сопротивление нагрузки ![]() :
:
 (12)
(12)
Сопротивления соединительных проводов находим по формуле:
![]() (13)
(13)
Где ![]() - удельное электрическое сопротивление провода (Ом/м);
- удельное электрическое сопротивление провода (Ом/м); ![]() - длина соединительных проводов (90 м);
- длина соединительных проводов (90 м);
S-
площадь поперечного сечения соединительных проводов (![]() ).
).
 Ом;
Ом;
Примечание, для соединения схемы с ПСН используем кабель КВВГ.
Сопротивление нагрузки (12) будет равно:
![]() Ом;
Ом;
В качестве исходной схемы берем схему, представленную на рисунке 3. Необходимо выбрать стабилитрон VD. Для этого вычисляем необходимое напряжение стабилизации ![]() :
:
![]() (14)
(14)
где![]() - напряжение вхождения транзистора в насыщение. Так как напряжение стабилизации
- напряжение вхождения транзистора в насыщение. Так как напряжение стабилизации ![]() повторяется на сопротивлении
повторяется на сопротивлении ![]() (так как
(так как ![]() ), то есть возможность выбрать номинальное напряжение стабилизации стабилитрона
), то есть возможность выбрать номинальное напряжение стабилизации стабилитрона ![]() :
:
![]() ; (15)
; (15)
![]() выбирается таким образом, чтобы транзистор VT не входил в режим насыщения. Для кремниевых транзисторов принимается
выбирается таким образом, чтобы транзистор VT не входил в режим насыщения. Для кремниевых транзисторов принимается ![]() В,
В,
![]() В;
В;
Выбираем прецизионный стабилитрон Д815Е. Его параметры:
Напряжение стабилизации ![]() В;
В;
Ток стабилизации ![]() ;
;
Максимальное дифференциальное сопротивление ![]() Ом;
Ом;
Допустимая рассеиваемая мощность ![]() mВт;
mВт;
Температурный коэффициент сопротивления ТКС=0,1.
Теперь выбираем сопротивление ![]() . Оно необходимо для задания тока через стабилитрон VD (
. Оно необходимо для задания тока через стабилитрон VD (![]() ) и находиться из соотношения (16):
) и находиться из соотношения (16):
![]() ; (16)
; (16)
 Ом;
Ом;
Выбираем по ряду Е24 сопротивление ![]() = 4,3 Ом.
= 4,3 Ом.
Мощность рассеваемая на сопротивлении будет равна:
![]() Вт;
Вт;
С целью надежности, номинальную мощность резистора принимаем с запасом от 3 до 6 раз:
![]() Вт;
Вт;
Принимаем ![]() = 0,05 Вт.
= 0,05 Вт.
Выбираем сопротивление ![]() :
:
 Ом;
Ом;
Для того чтобы скомпенсировать разброс напряжения стабилитрона и влияние тока базы транзистора сопротивление ![]() делаем с подстройкой:
делаем с подстройкой:
 Ом;
Ом;
Принимаем ![]() Ом (по ряду Е96);
Ом (по ряду Е96); ![]() Ом (по ряду Е24).
Ом (по ряду Е24).
Мощность рассеваемая сопротивлением ![]() равна:
равна:
![]() Вт;
Вт;
Номинальную мощность сопротивления ![]() принимаем также в
принимаем также в ![]() раз больше:
раз больше:
![]() Вт = 2,5 Вт;
Вт = 2,5 Вт;
Далее выбираем транзистор VT. Он должен удовлетворять следующим параметрам:
![]() В;
В;
![]() А;
А;
![]() ;
;
![]() В.
В.
Выбираем по справочнику ВС489С. Его параметры:
Допустимое напряжение К-Э ![]() В;
В;
Допустимый ток коллектора ![]() mA;
mA;
Напряжение насыщения ![]() В;
В;
Коэффициент усиления ![]() ;
;
Допустимая рассеваемая мощность ![]() mВт.
mВт.
Рассеваемая мощность на транзисторе будет:
![]() mВт;
mВт;
Резистор ![]() в данном случае необязателен, поэтому принимаем
в данном случае необязателен, поэтому принимаем ![]() = 0.
= 0.
Выбираем операционный усилитель (ОУ): ОР-37Е. Его параметры:
Напряжение питания ![]() В;
В;
Потребляемая мощность ![]() mВт;
mВт;
Напряжение смещения ![]() мкВ;
мкВ;
КОСС ![]() дБ;
дБ;
Коэффициент усиления ![]() ;
;
Входное сопротивление ![]() Мом;
Мом;
Средний входной ток ![]() нА;
нА;
Разность входных токов ![]() 7нА;
7нА;
![]() ;
;
Температурный диапазон ![]() .
.
3.3 Определение погрешностей источника стабильного тока
Определяем погрешности:
а) Погрешность от разброса сопротивлений не учитываем, так как сопротивление ![]() подстроечное;
подстроечное;
б) Погрешность от отклонения напряжения питания:
Разброс напряжения питания составляет 0,5%, тогда:
![]() В;
В;
Отклонение напряжения питания до минимума ![]() равно:
равно:
![]() ;
;
Выражаем отсюда ток стабилизации:
![]() mA;
mA;
Разброс напряжения стабилизации составляет:
![]() mВ;
mВ;
Аналогичный расчет делаем для повышения напряжения питания.
![]() mA;
mA;
![]() mВ;
mВ;
Наибольшим отклонением напряжения стабилизации является - 2,787 mВ.
Погрешность составит:
![]() mA;
mA;
в) Погрешность от реального ОУ, она зависит в данном случае от ![]() :
:
![]() mВ;
mВ;
![]() мкА;
мкА;
г) Погрешность от резистора ![]() не учитываем, так как
не учитываем, так как ![]() подстроечное.
подстроечное.
д) Погрешность от транзистора. Она определяется долей тока базы, но так как ![]() подстроечное, то эту погрешность не учитываем.
подстроечное, то эту погрешность не учитываем.
е) Суммарная погрешность:
![]() мкА;
мкА;
или в процентном соотношении:
![]()
Окончательная схема источника стабильного тока изображена на рисунке 4.
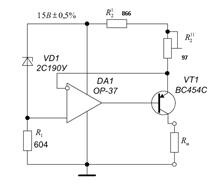
Рисунок 4 - Источник стабильного тока
4. Выбор схемы и расчет измерительного усилителя
4.1 Выбор схемы измерительного усилителя
Так как синфазная помеха не превышает 10В и коэффициент усиления не большой, то достаточно будет взять простейший дифференциальный усилитель. Схема простейшего дифференциального усилителя представлена на рисунке 5.
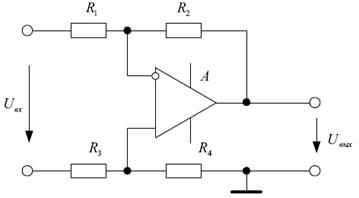
Рисунок 5 - Измерительный усилитель
4.2 Расчет измерительного усилителя
Определяем требуемый коэффициент усиления:
![]() ; (17)
; (17)
где ![]() - напряжение на выходе измерительного усилителя;
- напряжение на выходе измерительного усилителя;
![]() - напряжение на входе измерительного усилителя.
- напряжение на входе измерительного усилителя.
Выбираем операционный усилитель ОР-37Е.
Теперь выбираем сопротивления ![]() и
и ![]() . Они должны удовлетворять следующим условиям:
. Они должны удовлетворять следующим условиям:
![]() Мом;
Мом;
где ![]() - входное сопротивление ОУ;
- входное сопротивление ОУ;
![]() Ом;
Ом;
где ![]() - напряжение смещения ОУ;
- напряжение смещения ОУ;
![]() - разность входных токов ОУ.
- разность входных токов ОУ.
Принимаем ![]()
![]() 12Ком;
12Ком;
![]() Ком;
Ком;
Принимаем значения сопротивлений с точностью 0,005% по ряду Е96:
![]()
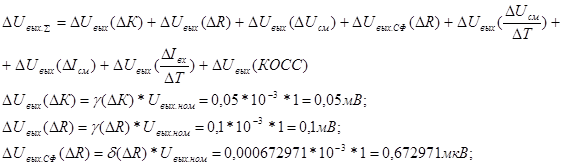
4.3 Определение погрешностей измерительного усилителя
Рассчитываем погрешности измерительного усилителя. Она состоит из погрешностей ОУ и погрешностей от влияния соединительных проводов.
Погрешность от несовпадения сопротивлений с номиналами:
Новый коэффициент усиления будет равен (17):
![]()
![]()
![]()
Погрешность от неточности резисторов:
![]()
где ![]() - отклонения сопротивлений от номинала.
- отклонения сопротивлений от номинала.
Эту погрешность определяем на самый благоприятный исход:
![]()
![]()
Адаптивная погрешность:

Погрешность от
U![]() mВ;
mВ;
не учитываем, так как используем подстройку
UU![]() mВ
mВ
где ТКUсм - температурный коэффициент напряжения смещения.
или в процентах:
![]() ;
;
Погрешность от входных токов:
![]() mВ;
mВ;
или в процентах:
![]()
Погрешность от конечного КОСС:
 mВ;
mВ;
Суммарная погрешность:
Суммарную погрешность рассчитываем (из 18) без учета влияния Uсф т.е. без учета ![]() и
и ![]() .
.
![]() ;
;
или в процентном соотношении:
![]()
Влияние соединительных проводов не учитываем, так как дальше в схеме есть подстройка выходного сигнала.
Окончательная схема измерительного усилителя приведена на рисунке 6.
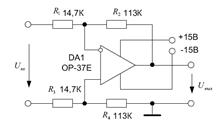
Рисунок 6 - Измерительный усилитель
5. Выбор схемы и расчет фильтра низкой частоты
5.1 Определение желаемых параметров фильтра
Составляем требуемую АЧХ фильтра (Рисунок 7):
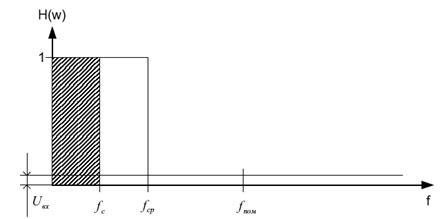
Рисунок 7 – АЧХ
Находим частоту опроса:
![]()
Находим верхнею частоту опроса:
![]() (19)
(19)
Следовательно
![]()
Далее находим частоту среза фильтра:
![]()
Составляем нормированную АЧХ фильтра:
Частота среза составит:
![]()
Уровень синфазного напряжения на входе фильтра находим из расчета измерительного усилителя (18):
![]() ;
;
Погрешность которая нас устраивает - 0,01%
Коэффициент передачи фильтра:
![]()
5.2 Определение реальных параметров фильтра
Теперь определяем степень аппроксимации полинома. Принимаем полином Баттерворта, степень которого должна быть такой, чтобы АЧХ проходила через точку с координатой 45 и 1. Нормированная частотная характеристика находиться по формуле:
![]()
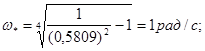
Отсюда находим относительную частоту ![]() :
:
![]()
Теперь находим порядок фильтра n:
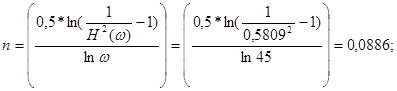
Так как этот коэффициент минимальный, то принимаем n=2. При этом коэффициент передачи на частоте помехи будет равен:
![]() (20)
(20)
Этот коэффициент меньше необходимого (0,5809), поэтому можно пересмотреть частоту среза для упрощения реализации фильтра. Воспользуемся формулой (20). Подставляем значение желаемой относительной частоты, после чего находим новое значение частоты среза:
![]()
Исходными данными для фильтра будут:
коэффициент усиления А=1;
частота среза ![]()
В качестве фильтра используем фильтр Баттерворта.
Составляем передаточную функцию фильтра:
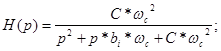
Для фильтра Баттерворта второго порядка коэффициента равны:
n=2; c=1; в=1; ![]()
![]()
5.3 Выбор схемы фильтра и его расчет
Принимаем схему фильтра низкой частоты по структуре Саллена-Ки, она показана на рисунке 8.
Выбираем параметры элементов схемы:
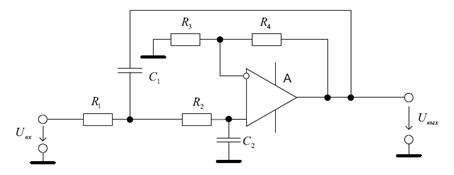
Рисунок 8 - Фильтр низкой частоты
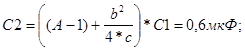
1) ![]()
принимаем по ряду Е24 ![]() =1,2 мкФ (
иначе нельзя будет посчитать
=1,2 мкФ (
иначе нельзя будет посчитать ![]() );
);
2) 
принимаем ближайшее меньшее значение по ряду Е24 ![]() =0,56мкФ
;
=0,56мкФ
;
3)
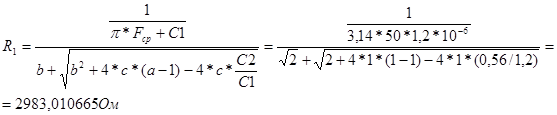
Принимаем по ряду Е96 ближайшее значение ![]() 2,94 Ком;
2,94 Ком;
4) 
Принимаем по ряду Е96 ближайшее значение ![]() 5,11 Ком
5,11 Ком
5) Так как коэффициент усиления А=1, то ![]() и
и ![]() 0
0
Окончательная схема фильтра низкой частоты показана на рисунке 9.
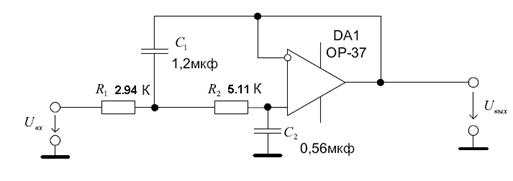
Рисунок 9 - Фильтр низкой частоты
5.4 Определение погрешностей фильтра
Рассчитываем погрешности, для этого преобразуем схему, исключив из нее конденсаторы. Измененная схема показана на рисунке 10.
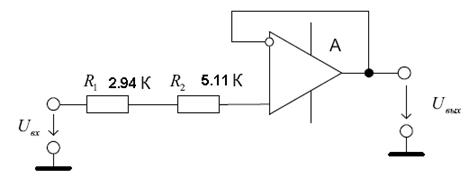
Рисунок 10 - Фильтр низкой частоты
Как видно из преобразованной схемы погрешности фильтра состоят из погрешностей неинвертирующего усилителя А.
Погрешность от неточности коэффициента отсутствует, так как этот
коэффициент равен 1;
Погрешность от неточности резисторов также отсутствует, так как ![]() 0;
0;
Погрешность от напряжения смещения Uсм:
![]()
Погрешность от напряжения смещения с изменением температуры:
![]()
5) Погрешность от влияния входных токов отсутствует, так как коэффициент равен 1 (![]() 0);
0);
6) Погрешность от конечного КОСС:

Суммарная погрешность:

или в процентах:
![]()
6. Выбор схемы и расчет ПНТ
6.1 Выбор схемы ПНТ
За основу возьмем схему приведенную на рисунке 11.
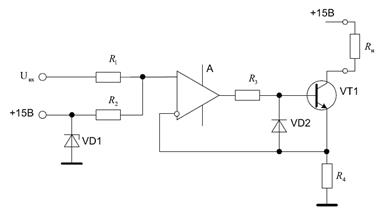
Рисунок 11 – ПНТ
6.2 Расчет ПНТ
В данной схеме сопротивления ![]() и
и ![]() используются в качестве делителя напряжения, так как на выходе ПНТ сигнал от 4 мА
. Они рассчитываются по методу двух узлов (Рисунок 12а и 12в). Проводимости ветвей равны:
используются в качестве делителя напряжения, так как на выходе ПНТ сигнал от 4 мА
. Они рассчитываются по методу двух узлов (Рисунок 12а и 12в). Проводимости ветвей равны:
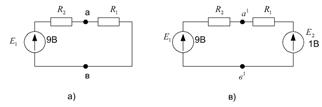
Рисунок 12
![]()
Возьмем потенциал точки в=в1 за нулевой.
 ; (21)
; (21)
Так как необходимо собрать делитель, который обеспечивал бы на выходе из схемы ПНТ ток от 4 до 20мА , то можно сместить напряжение на ОУ А на значение, которое бы обеспечивало бы при нулевом сигнале на входе схемы 4мА на выходе (соответственно при максимальном входном сигнале в 1В и смещении 0В на выходе должно быть 20-4 =16мА ). Тогда потенциалы в точке а будут равны:
![]()
Тогда система уравнений (21) примет вид:

Выражаем из полученного соотношения ![]() к
к ![]() :
:
![]() (22)
(22)
Выбираем сопротивления ![]() и
и ![]() по ряду Е192 с точностью
по ряду Е192 с точностью ![]() максимально удовлетворяющие отношению (22):
максимально удовлетворяющие отношению (22):
![]()
Теперь выбираем сопротивление датчика тока ![]() :
:
![]()
Напряжение ![]() найдем из (21):
найдем из (21):
Для того чтобы всю схему можно было настроить после сборки, сопротивления ![]() собираем из двух, одно из которых подстроечное
собираем из двух, одно из которых подстроечное ![]() .
.
![]() ;
;
Принимаем по ряду Е24 ![]() ;
;
![]() ;
;
Принимаем по ряду Е96 ![]() ;
;
Мощность рассеиваемая на сопротивлении![]() :
:
![]() Вт;
Вт;
Принимаем ![]() = 0,25Вт;
= 0,25Вт;
Выбираем транзистор VT.
![]() (23)
(23)
где ![]() - напряжение питания;
- напряжение питания;
![]() - ток на выходе ПНТ;
- ток на выходе ПНТ;
![]() - сопротивление нагрузки ПНТ;
- сопротивление нагрузки ПНТ;
![]() - напряжение насыщения на выводах К-Э транзистора.
- напряжение насыщения на выводах К-Э транзистора.
Для транзисторов структуры p-
n-
p
принимают ![]() не более
не более ![]() В. Напряжение питания выбираем таким, чтобы при максимальном выходном токе транзистор VT не выходит в насыщение. Из (23) найдем допустимое сопротивление нагрузки:
В. Напряжение питания выбираем таким, чтобы при максимальном выходном токе транзистор VT не выходит в насыщение. Из (23) найдем допустимое сопротивление нагрузки:
![]() ;
;
Таким образом схема ПНТ пригодна (с учетом запаса) для нагрузки сопротивлением до 500Ом.
Транзистор выбирается исходя из следующих условий:
![]()
![]()
коэффициент усиления ![]()
![]() где
где ![]() - допустимое напряжения на К-Э;
- допустимое напряжения на К-Э;
![]()
![]()
Выбираем по справочнику два транзистора ВС454С и собираем из них транзистор Дарлингтона.
Параметры ВС454С:
Допустимое напряжение К-Э ![]() =50В;
=50В;
Коэффициент усиления ![]()
Напряжение насыщения ![]() В;
В;
Допустимая рассеваемая мощность ![]() mВт.
mВт.
Выбираем ОУ ОР-37Е.
Сопротивление ![]() задает ток базы, но так как у транзистора Дарлингтона очень большой коэффициент усиления (
задает ток базы, но так как у транзистора Дарлингтона очень большой коэффициент усиления (![]() ), то необходимость в этом сопротивлении отпадает, поэтому принимаем
), то необходимость в этом сопротивлении отпадает, поэтому принимаем ![]() =0.
=0.
Выбираем диод VD2. Он необходим для защиты перехода Б-Э. Выбираем по справочнику диод КД503А.
6.3 Определение погрешностей ПНТ
Рассчитываем погрешности ПНТ.
1) Погрешность от неточности сопротивления ![]() отсутствует, так как оно подстроечное;
отсутствует, так как оно подстроечное;
2) Погрешность от напряжения смещения ОУ:
![]()
3) Погрешность от входных токов. Эта погрешность почти отсутствует так как ОУ включен как повторитель напряжения.
4) Погрешность от несовпадения ![]() и
и![]() с номиналами и от ухода напряжения стабилизации стабилитрона VD1:
с номиналами и от ухода напряжения стабилизации стабилитрона VD1:
При максимальном напряжении сигнала на входе выходной ток будет равен:
![]() (24)
(24)
Расчет делаем их наихудших условий. Как видно из (24) это произойдет при увеличении напряжения стабилитрона до максимального, при увеличении ![]() до максимума и при уменьшении
до максимума и при уменьшении ![]() до минимума, то есть:
до минимума, то есть:
![]() будет равно
будет равно ![]()
![]() будет равно
будет равно ![]()
![]() будет равно
будет равно ![]()
Выходной ток при таком раскладе будет равен:
![]()
При этом погрешность составит:
![]()
Суммарная погрешность ПНТ:
![]()
Расчет балластного сопротивления для стабилитрона:
![]()
где ![]() - минимальный ток стабилизации стабилитрона VD1.
- минимальный ток стабилизации стабилитрона VD1.
Принимаем по ряду Е96 ![]() =1,18 Ком. Мощность рассеваемая на
=1,18 Ком. Мощность рассеваемая на ![]() :
:
![]()
Принимаем ![]() =0,5Вт;
=0,5Вт;
Окончательная схема ПНТ показана на рисунке 13.
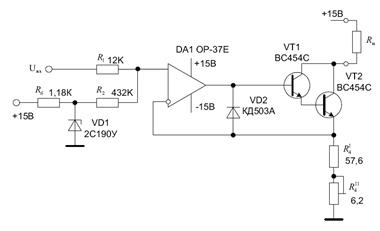
Рисунок 13 - ПНТ
Порядок подстройки ![]() : датчик температуры заменятся сопротивление 130ом, после чего подстроечным резистором
: датчик температуры заменятся сопротивление 130ом, после чего подстроечным резистором ![]() добиваются выходного тока 20мА, после чего датчик температуры ставится на место и теперь схема годна к применению.
добиваются выходного тока 20мА, после чего датчик температуры ставится на место и теперь схема годна к применению.
7. Расчет источника питания
7.1 Выбор схемы и расчет стабилизатора напряжения
Определяем требуемую нагрузку питания. Она состоит из:
Источника тока для ПСН: питание ОУ:
где ![]() - мощность потребляемая ОУ;
- мощность потребляемая ОУ;
![]() - напряжение питания ОУ.
- напряжение питания ОУ.
Измерительный усилитель: питание ОУ:
![]()
Фильтр: питание ОУ: ![]()
ПНТ: питание ОУ: ![]()
Ток стабилизации стабилитрона: ![]()
Выходной ток ![]()
Минимальный ток, потребляемый нагрузкой:
![]()
Максимальный ток потребляемый нагрузкой:
![]()
Выбираем интегральный стабилизатор напряжения К142ЕН6А:
Его параметры:
Входное напряжение ![]()
Максимальный ток нагрузки ![]()
Коэффициент нестабильности по напряжению ![]()
Коэффициент нестабильности по току ![]()
![]()
![]()
Потребляемый ток ![]()
Коэффициент сглаживания ![]()
Определяем напряжение на выходе стабилизатора:
![]()
Определяем номинальное входное напряжение:
![]()
Где 0,9 - необходимо для учета понижения напряжения на 10%.
Принимаем ![]() =20В;
=20В;
Определяем нестабильность напряжения на входе стабилизатора:
Из-за изменения напряжения на входе:
![]()
где ![]() - максимальное отклонение напряжения от номинального
- максимальное отклонение напряжения от номинального
![]()
От отклонения напряжения на входе из-за изменения тока в нагрузке:
![]()
Из-за изменения температуры:
![]()
Суммарная нестабильность:
![]()
или в процентах:
![]()
7.2 Выбор и расчет выпрямителя напряжения
Исходные данные для расчета:
Напряжение на входе выпрямителя ![]()
Напряжение на выходе ![]()
Максимальный ток нагрузки ![]()
Минимальный ток нагрузки ![]()
Определяем допустимые пульсации напряжения на выходе стабилизатора:
Напряжение пульсаций на выходе стабилизатора:
![]()
где![]() - напряжение на выходе источника питания;
- напряжение на выходе источника питания;
![]() - допустимый коэффициент пульсации на выходе измерителя;
- допустимый коэффициент пульсации на выходе измерителя;
Напряжение пульсаций на входе стабилизатора:
![]()
Допустимый процент пульсаций на выходе стабилизатора:
![]()
Выбираем двухполупериодную схему выпрямителя с питанием от трансформатора со средней точкой. Определяем средний ток и допустимое обратное напряжение:

Выбираем выпрямительный мост КЦ407А. Его параметры:
Максимальное обратное напряжение ![]()
Максимальный средний ток ![]()
![]()
![]()
7.3 Выбор и расчет трансформатора
Сопротивление вторичной обмотки:
![]() ,
,
где ![]() - напряжение на входе стабилизатора;
- напряжение на входе стабилизатора;
![]() - ток нагрузки (
- ток нагрузки (![]() ).
).
Напряжение на вторичной обмотке:
![]() ,
,
где ![]() - сопротивление диода.
- сопротивление диода.
![]()
![]()
Ток вторичной обмотки:
![]()
Ток первичной обмотки:
![]()
где![]() - напряжение на первичной обмотке.
- напряжение на первичной обмотке.
Определяем емкость конденсатора сглаживающего фильтра:
![]()
Емкость определяется для двух последовательно соединенных конденсаторов:
![]()
Принимаем по ряду Е24 ![]()
Определяем габаритную мощность для двухполупериодного выпрямителя:
![]()
По полученной габаритной мощности выбираем магнитопровод. Параметрами для выбора являются произведением площади сердечника на площадь окна:
![]() ;
;
По полученному значению из таблицы Ш-образных пластин выбираем магнитопровод Ш18. Его параметры:
Ширина перегородки а=1,8см;
Ширина окна в =0,9см;
Высота окна h=2,7см;
Площадь окна ![]()
Находим минимальную площадь сечения:
![]()
Необходимая толщина пакета пластин:
![]()
Проверка получения реальных габаритов:
![]()
Полученная цифра принадлежит интервалу ![]() .
.
Определяем число витков первичной обмотки:
![]()
Число витков вторичной обмотки:
![]()
Определяем диаметр проводов:
Первичной обмотки: ![]() ;
;
Вторичной обмотки: ![]() ;
;
Подбираем по справочнику провода марки ПЭЛ: ![]()
![]()
Окончательная схема источника питания приведена на рисунке 14.
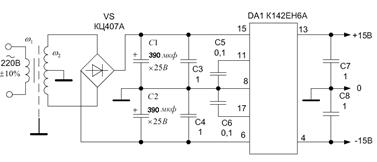
Рисунок 14 - Источник питания
8. Проверка общей погрешности
1) Погрешность ПСН: 0,015%;
2) Погрешность источника тока для ПСН: 0,031%;
3) Погрешность измерительного усилителя: 0,0306%
4) Погрешность фильтра: 0,0015%;
5) Погрешность ПНТ: 0,0658%;
6) Погрешность от синфазной помехи: 0,01%
7) Суммарная погрешность:
![]()
Заключение
В данной курсовой работе было необходимо разработать измерительную часть системы автоматического управления.
В ходе выполнения работы были выполнены расчеты преобразователей температуры в напряжение и напряжения а ток, расчет измерительного усилителя и фильтра низкой частоты, а также источника стабильного тока для ПСН и источника питания всей схемы. Были предусмотрены меры для снижения синфазной помехи, а именно в измерительном усилителе был использовании дифференциальный усилитель на ОУ с высоки КОСС, а также для окончательного снижения синфазной помехи до уровня, который уже не страшен, был использован фильтр низкой частоты.
Первоначальное распределение погрешности по узлам схемы оказалось неточным, из-за того, сто в ПНТ был добавлен делитель напряжения. На который пришлось почти 50% всей погрешности.
В результате работы суммарная погрешность с учетом влияния синфазной погрешности составила 0,1539% при допустимой по заданию 1%
Также была добавлена возможность подстройки всей схемы при помощи переменного резистора в ПНТ.
Список использованных источников
1. А.А. Сазанов и др. Микроэлементные устройства в автоматике - М.: Энергоиздат. 1991г.
2. В.С. Гутников Интегральная электроника в измерительных устройствах - Л.: Энергоатомиздат. 1988г.
3. А.Дж. Пейтон, В. Волш Аналоговая электроника на операционных усилителях - М.: БИНОМ, 1994г.
4. А.Л. Булычев и др. Аналоговые интегральные схемы: Справочник - Минск: Беларусь, 1993г.
5. М.В. Гальперин. Практическое схемотехника в промышленной автоматике - М.: Энергоатомиздат, 1987г.