Радиотелеметрические системы с временным разделением каналов
СОДЕРЖАНИЕ: Характеристика амплитудно–импульсного, широтно-импульсного и время-импульсного видов модуляции. Особенности переходных искажений 1 и 2 рода в области высоких частот. Помехоустойчивость и многоступенчатая коммутация радиосистем. Системы синхронизации.Содержание
Введение
Глава 1. Виды модуляции, применяемые в системах с ВРК
1.1 Амплитудно – импульсная модуляция (АИМ)
1.2 Широтно-импульсная модуляция
1.3 Время-импульсная модуляция
Глава 2 Переходные искажения в системах ВРК
2.1 Переходные искажения второго рода
2.2 Переходные искажения первого рода (в области ВЧ)
Глава 3 Помехоустойчивость РТМС с ВРК
Глава 4 Многоступенчатая коммутация в РТМС с ВРК
Глава 5 Синхронизация в РТМС с ВРК
5.1 Системы и сигналы синхронизации
5.2 Методы кадровой синхронизации
Заключение
Список литературы
Введение
Телекоммуникации являются одной из наиболее быстро развивающихся областей современной науки и техники. Жизнь современного общества уже невозможно представить без тех достижений, которые были сделаны в этой отрасли за немногим более ста лет развития. Отличительная особенность нашего времени – непрерывно возрастающая потребность в передаче потоков информации на большие расстояния. Это обусловлено многими причинами, и в первую очередь тем, что связь стала одним из самых мощных рычагов управления экономикой страны. Одновременно, претерпевая значительные изменения, становясь многосторонней и всеобъемлющей, электросвязь каждой страны становится все более интегрированной в мировое телекоммуникационное пространство.
Глава 1 Виды модуляции, применяемые в системах с ВРК
1.3 Амплитудно – импульсная модуляция (АИМ)
При АИМ амплитуда импульса изменяется в соответствии с передаваемым сообщением.
![]() , ( 1)
, ( 1)
где ![]() ,
, ![]() - амплитуда немодулированных импульсов,
- амплитуда немодулированных импульсов, ![]() - парциальный коэффициент модуляции,
- парциальный коэффициент модуляции, ![]() - модулирующая функция,
- модулирующая функция, ![]() - функция, описывающая форму импульсов,
- функция, описывающая форму импульсов, ![]() .
.
Различают АИМ1 и АИМ2. При АИМ1 амплитуда импульса следит за изменением модулирующей функции (рисунок 1).
![]() . ( 2)
. ( 2)
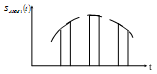
Рисунок 1
В случае АИМ2 амплитуда импульса определяется мгновенным значением моделирующей функции в точке ![]() (рисунок 2)
(рисунок 2)
![]() . ( 3)
. ( 3)
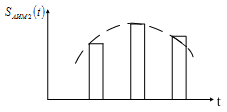
Рисунок 2
Анализ показывает, что АИМ2 сопровождают искажения. Обычно АИМ2 применяют на приемной стороне, если перед демодуляцией АИМ1 осуществляется удлинение импульсов, а также перед АЦП. Рассмотрим частотный спектр АИМ1 в случае:
![]() . ( 4)
. ( 4)
Спектр АИМ1 содержит: постоянную составляющую, составляющую на частоте модуляции, бесконечную сумму гармоник, составляющую на частотах ![]() (рисунок 3).
(рисунок 3).
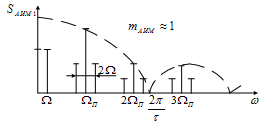
Рисунок 3
Особенностью спектра АИМ1 является то, что амплитуда составляющей на частоте модуляции не зависит от частоты, а амплитуды боковых составляющих при гармониках ![]() одинаковые.
одинаковые.
Демодуляцию АИМ сигналов можно осуществлять с помощью полосового фильтра (ПФ) или ФНЧ. Для демодуляции с помощью ПФ на его выходе получается амплитудно-модулированные колебания, и для выделения этих сообщений требуется применение амплитудного детектора (рисунок 4).

Рисунок 4
При демодуляции с помощью ФНЧ на выходе получается непосредственно сообщение (рисунок 5).
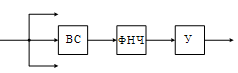
Рисунок 5
Усилитель (У) на выходе ФНЧ необходим, т.к. амплитуда сигнала на частоте модуляции ![]() ,
, ![]() .
.
Для увеличения отношения ![]() на выходе ВС ставят расширитель (Р) импульсов, т.е. преобразуют АИМ1 в АИМ2 (рисунок 6).
на выходе ВС ставят расширитель (Р) импульсов, т.е. преобразуют АИМ1 в АИМ2 (рисунок 6).
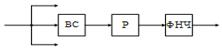
Рисунок 6
Такой метод демодуляции АИМ широко применяется. Спектр АИМ2 содержит те же спектральные составляющие, что и АИМ1, но имеются существенные отличия. Амплитудные составляющие на частоте ![]() зависят от частоты, а составляющие
зависят от частоты, а составляющие ![]() различны и так же зависят от частоты (рисунок 7).
различны и так же зависят от частоты (рисунок 7).
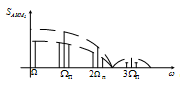
Рисунок 7
Из рассмотрения спектра АИМ2 следует, что использование АИМ2 приводит к неустранимым искажениям при демодуляции. Но чем меньше длительность импульсов ![]() , тем меньше эти искажения проявляются при демодуляции. Необходимо при расчете параметров выбирать верхнюю частоту ФНЧ из условия
, тем меньше эти искажения проявляются при демодуляции. Необходимо при расчете параметров выбирать верхнюю частоту ФНЧ из условия ![]() .
.
1.2 Широтно-импульсная модуляция
Параметры модуляции при ШИМ не входят явно в формулу ( 1), поэтому аналитическая запись ШИМ имеет вид:
![]() , ( 5)
, ( 5)
где ![]() и
и ![]() - функции, описывающие изменение передних и задних фронтов импульсов соответственно.
- функции, описывающие изменение передних и задних фронтов импульсов соответственно.
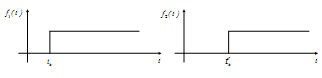
Рисунок 8
Закон изменения длительности импульсов имеет вид:
![]() , ( 6)
, ( 6)
где ![]() - длительность импульсов при отсутствии модуляции,
- длительность импульсов при отсутствии модуляции, ![]() - нормированная модулирующая функция,
- нормированная модулирующая функция, ![]() - парциальный коэффициент модуляции.
- парциальный коэффициент модуляции.
Различают двухстороннюю (ШИМ) и одностороннюю (ОШИМ) модуляцию. Кроме того, различают ШИМ первого и второго рода. В случае ШИМ1 длительность импульсов определяется значением модулирующей функции ![]() в момент возникновения передних и задних фронтов импульсов.
в момент возникновения передних и задних фронтов импульсов.
При ШИМ2 длительность импульсов пропорциональна мгновенным значениям модулирующего напряжения в тактовых точках. В качестве модулятора ОШИМ2 используют фантастроны. При ![]() различия между ШИМ1 и ШИМ2 не существенны. Выражения для ОШИМ1 и ОШИМ2 имеют вид
различия между ШИМ1 и ШИМ2 не существенны. Выражения для ОШИМ1 и ОШИМ2 имеют вид
при ОШИМ1 ![]() ,
,
при ОШИМ2 ![]() .
.
Определим спектр ОШИМ1 при модулирующей функции ![]() (рисунок 9).
(рисунок 9).
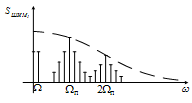
Рисунок 9
Спектр ОШИМ1 содержит постоянную составляющую, составляющую на частоте модуляции ![]() и составляющие на частотах
и составляющие на частотах ![]() . Неискаженная демодуляция ОШИМ1 вследствие наличия составляющих
. Неискаженная демодуляция ОШИМ1 вследствие наличия составляющих ![]() невозможна.
невозможна.
Частотный спектр ОШИМ2 имеет те же составляющие, что ОШИМ1. Отличие заключается в наличии в спектре ОШИМ2 гармоник модулирующей частоты ![]() , что приводит к дополнительным искажениям сигнала при демодуляции (рисунок 10).
, что приводит к дополнительным искажениям сигнала при демодуляции (рисунок 10).
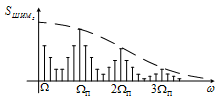
Рисунок 10
Практически используется способ демодуляции ШИМ и ОШИМ с помощью ФНЧ (рисунок 11).
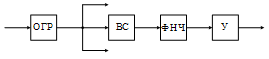
Рисунок 11
Обычно выбираются следующие параметры ОШИМ ![]() ,
, ![]() . Исходя из длительности
. Исходя из длительности ![]() осуществляется выбор полосы приемного тракта.
осуществляется выбор полосы приемного тракта.
1.3 Время-импульсная модуляция
При ВИМ сдвиг импульсов ![]() относительно тактовых точек
относительно тактовых точек ![]() изменяется по закону
изменяется по закону ![]() (рисунок 12)
(рисунок 12)
модуляция искажение коммутация синхронизация сигнал
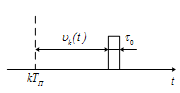
Рисунок 12
Для ВИМ выражения для последовательности импульсов имеет вид ![]() , ( 7)
, ( 7)
где ![]() ,
, ![]() . Различают ФИМ первого и второго рода.
. Различают ФИМ первого и второго рода.
Для ВИМ первого рода ![]() , т.е. временной сдвиг импульсов пропорционален значению модулирующей функции
, т.е. временной сдвиг импульсов пропорционален значению модулирующей функции ![]() в момент появления этого же импульса.
в момент появления этого же импульса.
Для ВИМ второго рода ![]() , т.е. временной сдвиг импульсов пропорционален значению
, т.е. временной сдвиг импульсов пропорционален значению ![]() в тактовых точках. Различия между ФИМ-1 и ФИМ2 при
в тактовых точках. Различия между ФИМ-1 и ФИМ2 при ![]() становятся несущественными.
становятся несущественными.
Определим спектр ФИМ-1, полагая что ![]() (рисунок 13).
(рисунок 13).
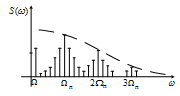
Рисунок 13
Спектр ФИМ-1 состоит из:
-постоянной составляющей;
-полезной составляющей на частоте ![]() ;
;
-составляющих с частотой ![]() ;
;
-составляющих с частотами ![]() .
.
Частотные составляющие спектров ШИМ-1 и ВИМ-1 совпадают, но амплитуды полезных составляющих зависят от индекса модуляции и очень малы.
Амплитуда полезной составляющей определяется выражением:
![]() ( 8)
( 8)
При ![]() ,
, ![]() и амплитуде полезной составляющей на выходе ФНЧ в этом случае равна
и амплитуде полезной составляющей на выходе ФНЧ в этом случае равна ![]() , т.е. зависит от частоты модуляции.
, т.е. зависит от частоты модуляции.
Следовательно, демодуляция ВИМ-1 с помощью ФНЧ сопровождается завалом нижних и подъемом верхних модулирующих частот. Демодуляция ВИМ с помощью ФНЧ на практике не используется. Чтобы уменьшить искажения и увеличить уровень полезной составляющей на выходе демодулятора при демодуляции ВИМ применяются преобразования ВИМ в ШИМ или ВИМ в АИМ.
Рассмотрим преобразование ВИМ в ОШИМ с помощью триггера (рисунок 14), где ![]() - сигнал в тактовых точках,
- сигнал в тактовых точках, ![]() - сигнал ВИМ,
- сигнал ВИМ, ![]() - сигнал на выходе триггера.
- сигнал на выходе триггера.
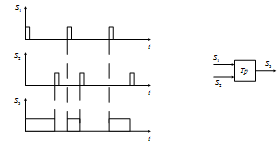
Рисунок 14
Преобразование ВИМ в АИМ (рисунок 15).
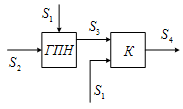
Рисунок 15
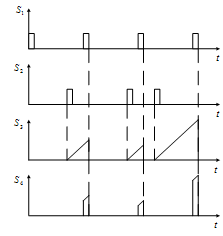
Рисунок 16
Демодулятор ВИМ имеет вид, приведенный на рисунке 17, где ПР – преобразователь.
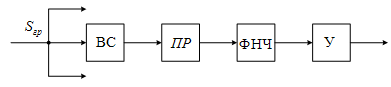
Рисунок 17
Глава 2 Переходные искажения в системах ВРК
Переходные искажения появляются в результате переходных процессов, которые сопровождаются появлением или исчезновением импульсных сигналов в многоканальных системах.
Причиной появления переходных искажений является недостаточно широкая полоса пропускания тракта радиолинии. Различают помехи первого рода, возникающие вследствие искажений спектра группового сигнала в области высоких частот (ВЧ) и помехи второго рода, возникающие из-за искажений спектра группового сигнала в области нижних частот (НЧ). Искажения первого рода возникают из-за завала ВЧ составляющих спектра в тракте радиолиний. Искажения второго рода возникают в передающей аппаратуре до модулятора несущей и в приемной (видеоусилителе) в области модулирующих частот.
2.1 Переходные искажения второго рода
Возникновение помех второго рода обусловлено нелинейностью АЧХ и ФЧХ видеоусилителя общего тракта в полосе, которую занимает спектр модулирующих частот. Полагаем, что на входе видеоусилителя с характеристикой ![]() подана последовательность импульсов n каналов, и в одном канале осуществляется АИМ (рисунок 18).
подана последовательность импульсов n каналов, и в одном канале осуществляется АИМ (рисунок 18).
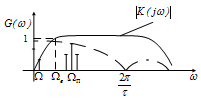
Рисунок 18
Нелинейность АЧХ и ФЧХ видеоусисилителя приводит к уменьшению полезной составляющей на ![]() , а ее фаза сдвигается на угол
, а ее фаза сдвигается на угол ![]() , что отображено на векторной диаграмме (рисунок 19).
, что отображено на векторной диаграмме (рисунок 19).
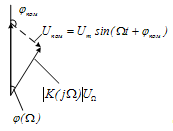
Рисунок 19
Из анализа векторной диаграммы следует, что в состав спектров немодулируемых последовательностей как бы вводится дополнительная составляющая на частоте ![]() с амплитудой
с амплитудой ![]() и уменьшается амплитуда полезной составляющей в спектре модулируемого сигнала (рисунок 20).
и уменьшается амплитуда полезной составляющей в спектре модулируемого сигнала (рисунок 20).
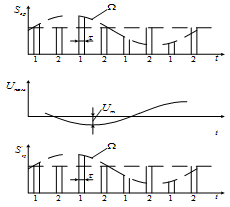
Рисунок 20
Сигнал на выходе i-го временного селектора без искажений имеет вид:
![]() , ( 9)
, ( 9)
![]() .
.
Групповой сигнал при искажениях второго рода описывается выражением:
![]() . ( 10)
. ( 10)
Если модуляция импульсов осуществляется во всех N каналах, то из векторной диаграммы следует, что:
![]() . ( 11)
. ( 11)
Тогда сигнал на выходе временного селектора равен:
![]() . ( 12)
. ( 12)
Для демодуляции АИМ используют ФНЧ. Сигнал на выходе ФНЧ при ![]() равен:
равен:
![]() . ( 13)
. ( 13)
Оценим переходные искажения коэффициентом ![]() :
:
![]() , ( 14)
, ( 14)
где ![]() - мощность сигнала i-го канала
- мощность сигнала i-го канала ![]() , а мощность помехи равна:
, а мощность помехи равна:
 . ( 15)
. ( 15)
При условии, что коэффициенты модуляции ![]() во всех N каналах одинаковы, формула для коэффициента переходных искажений имеет вид:
во всех N каналах одинаковы, формула для коэффициента переходных искажений имеет вид:
![]() . ( 16)
. ( 16)
Если ![]() , а расстояние между циклами
, а расстояние между циклами ![]() ,то:
,то:
![]()
![]() . ( 17)
. ( 17)
Введем понятие среднего коэффициента искажений ![]() :
:
![]()
![]() . ( 18)
. ( 18)
В этом случае:
![]() . ( 19)
. ( 19)
Таким образом, при N 2 , ![]() . Таким образом, при увеличении N уменьшается
. Таким образом, при увеличении N уменьшается ![]() и падает мощность помех
и падает мощность помех ![]() .
.
Основным способом устранения НЧ искажений является применение фиксатора уровня (рисунок 21):
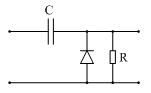
Рисунок 21
Постоянная времени фиксатора уровня канала связи выбирается достаточно большой, но такой величины, чтобы напряжение на емкости успевало отслеживать заваленные НЧ спектра АИМ.
Переходные помехи 2-го рода действуют сильнее на АИМ и менее на ШИМ и ВИМ. Если используются ШИМ и ВИМ, то для уменьшения помех 2-го рода применяют ограничитель.
2.2 Переходные искажения первого рода (в области ВЧ)
Переходные искажения первого рода проявляются как наложение импульсов друг на друга и возникают при недостаточно широкой полосе пропускания тракта или при малом временном интервале между импульсами соседних каналов (рисунок 22):
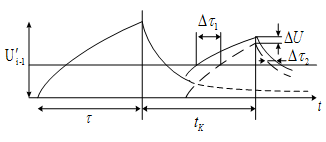
Рисунок 22
Для анализа переходных помех первого рода аппроксимируют ВЧ часть частотной характеристики общего тракта частотной характеристикой RC – цепи (рисунок 23).
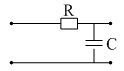
Рисунок 23
Амплитудно – частотная характеристика RC цепи имеет вид:
![]() , ( 20)
, ( 20)
где ![]() - полоса на уровне 0.707,
- полоса на уровне 0.707, ![]() .
.
В случае переходные искажения 1-го рода в системе ШИМ ошибка равна:
 . ( 21)
. ( 21)
Т.е. для уменьшения ошибки ![]() необходимо увеличивать полосу тракта
необходимо увеличивать полосу тракта ![]() или интервал
или интервал ![]() , возможно использовать предискажения.
, возможно использовать предискажения.
Глава 3 Помехоустойчивость РТМС с ВРК
Флюктуационные помехи на входе приемного устройства приводят к изменению амплитуды и длительности импульсов. Помехи, действующие между импульсами называются – интервальными. Помехи, накладывающиеся на импульсы делятся на срединные и краевые. При АИМ путем стробирования приемника можно избавиться только от интервальных помех. При ВИМ и ШИМ использование ограничений по минимуму и максимуму позволяет избавиться от срединных помех, но действие краевых помех остается. Оценим помехоустойчивость РТМС с АИМ-АМ, ШИМ-ЧМ, ФИМ-АМ.
Структурная схема приемной части системы с ВРК изображена на рисунке 24.
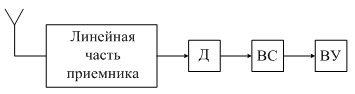
Рисунок 24
Полагаем, что отношение сигнал - шум достаточно велико. Шум нормальный белый в полосе приемника. В качестве критерия оценки используется отношение случайной компоненты выходного сигнала к полезной, т.е. относительную случайную ошибку. В этом случае при АИМ-АМ относительная случайная ошибка имеет вид [2]:
![]() , ( 22)
, ( 22)
где ![]() - среднее квадратичное значение шума,
- среднее квадратичное значение шума, ![]() - максимальное изменение амплитуды импульса, h – отношение сигнал - шум.
- максимальное изменение амплитуды импульса, h – отношение сигнал - шум.
Следовательно для уменьшения относительной случайной ошибки в этом случае необходимо увеличивать отношение сигнал - шум.
При ШИМ-ЧМ относительная случайная ошибка равна:
 , ( 23)
, ( 23)
где ![]() - среднее квадратичное значение флюктуаций фронта импульсов,
- среднее квадратичное значение флюктуаций фронта импульсов, ![]() - максимальная полезная ширина импульса,
- максимальная полезная ширина импульса, ![]() - девиация частоты несущей,
- девиация частоты несущей, ![]() - канальный интервал.
- канальный интервал.
Для уменьшения относительной случайной ошибки системы ШИМ-ЧМ надо увеличить отношение сигнал - шум, девиацию частоты несущей и канальный интервал.
При ФИМ-АМ относительная случайная ошибка имеет вид:
 , ( 24)
, ( 24)
![]() - максимальное временное смещение,
- максимальное временное смещение, ![]() – индекс временной модуляции,
– индекс временной модуляции, ![]() - длительность импульсов. Для уменьшения относительной случайной ошибки в этом случае необходимо увеличивать индекс временной модуляции и отношение сигнал – шум.
- длительность импульсов. Для уменьшения относительной случайной ошибки в этом случае необходимо увеличивать индекс временной модуляции и отношение сигнал – шум.
Глава 4 Многоступенчатая коммутация в РТМС с ВРК
Количество измеряемых величин и точность их измерения меняется в широких пределах, что требует применения разных частот дискретизации. В случае использования одного задающего генератора для увеличения гибкости аппаратуры используют многоступенчатую коммутацию, обеспечивающую разные тактовые частоты.
Принцип многоступенчатой коммутации показан на (рисунке 25).
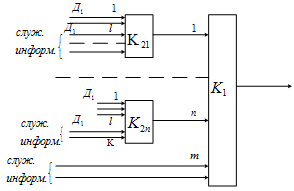
Рисунок 25
Первая ступень коммутаторов ![]() имеет m входов с временем подключения одного входа
имеет m входов с временем подключения одного входа ![]() . Вторая ступень включает n коммутаторов
. Вторая ступень включает n коммутаторов ![]() с временем подключения
с временем подключения ![]() . Входы с (n+1) до m используются для передачи служебной информации и осуществления синхронизации, аналоговые входы с (l+1) до К коммутаторов
. Входы с (n+1) до m используются для передачи служебной информации и осуществления синхронизации, аналоговые входы с (l+1) до К коммутаторов ![]() . Для простоты будем считать, что m=n, l=k, тогда
. Для простоты будем считать, что m=n, l=k, тогда ![]() , где N – общее число датчиков в схеме.
, где N – общее число датчиков в схеме.
Возможны два варианта использования схемы (рисунок 25):
1) Все коммутаторы ![]() работают синхронно и синфазно. А
работают синхронно и синфазно. А ![]() , т.е. за время подключения одного входа коммутатора
, т.е. за время подключения одного входа коммутатора ![]() , коммутатор
, коммутатор ![]() успевает опросить все m входов. Следовательно, на выходы схемы будут последовательно поданы сигналы всех первых датчиков, затем вторых и т.д. Увеличение частоты опроса для ряда датчиков достигается путем их подключения одновременно к нескольким входам одного коммутатора
успевает опросить все m входов. Следовательно, на выходы схемы будут последовательно поданы сигналы всех первых датчиков, затем вторых и т.д. Увеличение частоты опроса для ряда датчиков достигается путем их подключения одновременно к нескольким входам одного коммутатора ![]() (рисунок 26).
(рисунок 26).
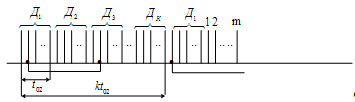
Рисунок 26
2) Все коммутаторы ![]() работают синхронно и синфазно, а
работают синхронно и синфазно, а ![]() . Т.е. на выходы схемы последовательно подаются сигналы всех датчиков коммутаторов
. Т.е. на выходы схемы последовательно подаются сигналы всех датчиков коммутаторов ![]() , затем
, затем ![]() и т.д. Увеличение частоты опроса ряда датчиков достигается подключением датчика одновременно к нескольким одноименным клеммам разных коммутаторов второй ступени (рисунок 27).
и т.д. Увеличение частоты опроса ряда датчиков достигается подключением датчика одновременно к нескольким одноименным клеммам разных коммутаторов второй ступени (рисунок 27).
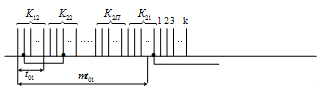
Рисунок 27
Возможно включение третий ступени коммутации.
Глава 5 Синхронизация в РТМС с ВРК
5.1 Системы и сигналы синхронизации
Система синхронизации в РТМС с ВРК обеспечивает синхронную и синфазную работу коммутаторов, установленных на передающей и приемной станции. Нарушение синхронизма ведет к потере информации во всех каналах. В циклических РТМС через время ![]() , равное периоду опроса, начинается новый цикл. Для разделения каналов необходимо обозначить начало цикла. Для этой цели перед импульсом первого канала включается специальный сигнал (начало кадра), отличающийся от остальных сигналов по амплитуде, длительности или форме (рисунок 28).
, равное периоду опроса, начинается новый цикл. Для разделения каналов необходимо обозначить начало цикла. Для этой цели перед импульсом первого канала включается специальный сигнал (начало кадра), отличающийся от остальных сигналов по амплитуде, длительности или форме (рисунок 28).
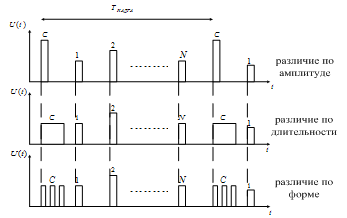
Рисунок 28
Такая синхронизация называется кадровой. На приемной стороне осуществляется выделение синхросигнала. Системы синхронизации могут быть двух типов: синхронные и стартстопные. Синхронные системы работают независимо от того, передается информация или нет. В этих системах предъявляются очень высокие требования к стабильности частоты генераторов.
В стартстопных системах передающий и приемный распределители работают совместно в течении одного цикла, равного длине кадра или длительности кодовой комбинации. Каждый новый цикл в них начинается с исходного синфазного положения. Рассмотрим обе системы.
Синхронная система синхронизации.
В этом случае осуществляется подстройка фазы колебаний высокостабильного генератора приемной станции под фазу колебаний передающей станции. В качестве сигналов, по которым производится фазирование, могут использоваться кадровые посылки, канальные сигналы и символы кодовых комбинаций.
Типичная схема коррекции фазы генератора приемной станции изображена на рисунке 2

Рисунок 29
В фазовом дискриминаторе происходит сравнение фаз принимаемых и передаваемых импульсов, далее формируется управляющий сигнал, воздействующий на генератор.
Стартстопные системы синхронизации.
Структура сигнала при стартстопной синхронизации изображена на рисунке 30.
Стартовая, информационные и стоповя посылки отличаются по амплитуде, длительности или форме.

Рисунок 30.
При включении передатчика с помощью стартового импульса запускается синхронизатор приемного устройства. В конце цикла передачи синхронизатор останавливается стоповым импульсом. В промежутке между стартовым и стоповым импульсами передаются информационные посылки.
5.2 Методы кадровой синхронизации
Различают следующие методы кадровой синхронизации: маркерную, безмаркерную и инерционную.
Маркерная синхронизация осуществляется путем передачи в начале кадра синхроимпульса (маркера), отличающегося от информационных и других служебных сигналов. В приемной станции осуществляется обнаружение и выделение маркерного сигнала, из которого формируется кадровый сигнал. Структура селектора маркерного сигнала зависит от его формы. Если маркерный сигнал отличается по амплитуде от информационных импульсов, то схема селектора имеет вид (рисунок 31).
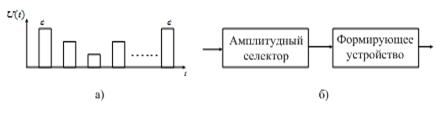
Рисунок 31
Недостатком этой схемы является невысокая помехоустойчивость.
Схема селектора маркерного сигнала, отличающегося от информационных сигналов по длительности, приведена на рисунке 32.
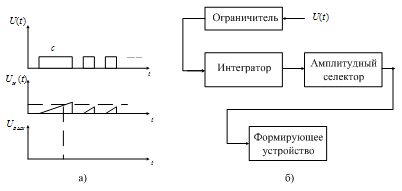
Рисунок 32
Данная схема обладает более высокой помехоустойчивостью, чем схема изображенная на рисунке 31.
Наибольшей помехоустойчивостью обладает схема селектора маркерного сигнала, отличающегося от информационных сигналов по форме (рисунок 33).
Безмаркерная синхронизация является частным случаем маркерной синхронизации, когда синхросигнал отсутствует. Начало кадра определяется по паузе, длительность которой равна удвоенному канальному интервалу (рисунок 34).
При инерционной синхронизации для управления работой слектора приемной станции используется инерционный генератор синхроимпульсов, который подстраивается по фазе принимаемыми синхросигналами.
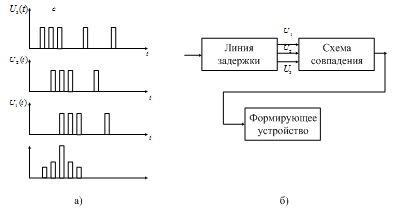
Рисунок 33
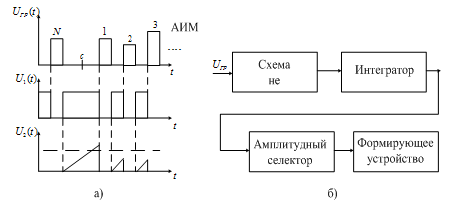
Рисунок 34
При инерционной синхронизации кратковременные сбои не приводят к срыву синхронизма коммутаторов приемной и передающей систем. Рассмотрим блок – схему приемной части канала инерционной синхронизации (рисунок 35).
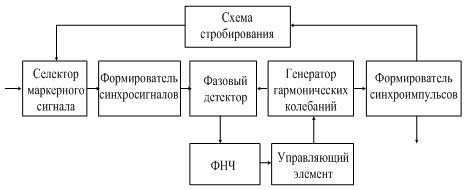
Рисунок 35
В селекторе осуществляется выделение маркерного сигнала по форме, амплитуде или длительности. В начальный период времени схема стробирования отключена и система осуществляет вхождение в синхронизм. Из выделенного маркерного сигнала формируется синхросигнал. Этот сигнал используется в качестве опорного, по которому производится подстройка фазы генератора. Для повышения помехоустойчивости введено стробирование маркерного сигнала.
ФНЧ обеспечивает инерционность работы схемы при пропадании сигналов синхронизации за определенное время.
Заключение
Радиосвязь - одно из самых простых и надежных средств связи. Рации полезны и удобны, их можно использовать там, где недоступен ни один другой вид связи, системы радиосвязи недороги по цене, легко развертываются и нетребовательны к условиям окружающей.
Наиболее характерными для современных РСПИ являются три формы представления сообщений, которые формируются на борту и передаются по линиям связи:
1. Сообщения о наличии/отсутствии некоторого априорно известного сообщения (включения/выключения двигателей, удары метеорита).
2. Сообщения о величинах характеризуют значения параметров в определенный момент времени.
3. Сообщения о процессах должны с заданной точностью воспроизводить процессы на определенном отрезке времени, т.е. в этом случае также необходимо производить калибровку амплитуды и масштабирование по времени.
Список литературы
1. Радиотехнические методы передачи информации: Учебное пособие для вузов / В.А. Борисов, В.В. Калмыков, Я.М. Ковальчук и др.; Под ред. В.В. Калмыкова. М.: Радио и связь. 1990. 304с.
2. Системы радиосвязи: Учебник для вузов / Н.И. Калашников, Э.И. Крупицкий, И.Л. Дороднов, В.И. Носов; Под ред. Н.И. Калашникова. М.: Радио и связь. 1988. 352с.
3. Тепляков И.М., Рощин Б.В., Фомин А.И., Вейцель В.А. Радиосистемы передачи информации: Учебное пособие для вузов / М.: Радио и связь. 1982. 264с.
4. Кириллов С.Н., Стукалов Д.Н. Цифровые системы обработки речевых сигналов. Учебное пособие. Рязань. РГРТА, 1995. 80с.