Задачи по курсу общей физики для студентов астрономического отделения. (1)
СОДЕРЖАНИЕ: В основе предлагаемой работы лежит опыт семинарских занятий по курсам общей физики и астрономии для студентов астрономического отделения физического факультета мгу![]() Бычков К.В.(1)
, Сараева И.М.(2)
Бычков К.В.(1)
, Сараева И.М.(2)
Кинематика материальной точки.
Задачи по курсу общей физики
для студентов астрономического отделения.
(1) Государственный астрономический институт им. П.К. Штернберга
(2) Физический факультет МГУ, кафедра общей физики
Введение
В основе предлагаемой работы лежит опыт семинарских занятий по курсам общей физики и астрономии для студентов астрономического отделения физического факультета МГУ.
При изучении механики материальной точки, в особенности её разделов, связанных с движением по криволинейной траектории, часто оказываются полезными астрономические приложения. В условиях поверхности Земли набор естественных траекторий практически сводится к параболе. В космосе, наоборот, представлены многие типы криволинейного движения: вращение по окружности, а также эллиптические, параболические и гиперболические траектории разной степени вытянутости. К тому же формы орбит космических объектов не ограничиваются одними коническими сечениями. Например, обращение звёзд вокруг центра галактики во многих случаях не описываются законами Кеплера, а в процессе сжатия вращающихся газовых туманностей имеет место постепенное приближение к центру по спирали. Параллельно с физическим содержанием задачи уместно привести и первые сведения о математическом аппарате плоских кривых линий.
Другим аспектом является соотношение между прямыми и обратными задачами. Для лабораторных условий типична прямая постановка: требуется вычислить параметры траектории тела, зная действующие на него силы. В астрономии как наблюдательной науке важен и обратный подход, когда по известному движению выясняют характер взаимодействия. Часть предлагаемого материала даёт студентам первое представление об обратных задачах. С методической точки зрения решение обратной задачи, как правило, проще и нагляднее. Поэтому имеет смысл показать одну и ту же задачу дважды: сначала в разделе «кинематика» как обратную, и затем, после приобретения студентами опыта, в разделе «динамика» выполнить решение более сложной прямой задачи. Перейдём к изложению материала, предварительно договорившись о некоторых обозначениях. Координаты точки, движущейся в плоскости, как обычно, равны x и y, время - t, а для параметров движения оставляем буквы a, b, k, w, j. Векторы представляем прямыми жирными символами: r – радиус вектор частицы, v – её скорость, w – ускорение. Точка над символом описывает дифференцирование по времени.
I Определение траектории, скорости и ускорения точки из закона движения в декартовых координатах.
Во всех задачах этого раздела требуется определить форму траектории, найти векторы скорости и ускорения, а также восстановить динамический закон движения.
Задача 1. Точка движется в плоскости. Её координаты x и y зависят от времени t как
![]() (
1)
(
1)
![]() (
2)
(
2)
где a, b, и - параметры.
Если a либо b равны нулю, то имеет место прямолинейное движение вдоль той или иной координатной оси. Оно происходит внутри отрезка длиной 2a , либо 2b, центр которого расположен в начале координат. Предположим, что оба этих параметра отличны от нуля. Разделим первое уравнение на a, второе - на b и раскроем косинус суммы:
![]() , (
3 )
, (
3 )
![]() . (
4 )
. (
4 )
Исключим время t
из уравнений движения. Сначала рассмотрим два особых случая. При ![]() получается эллипса, ориентированный параллельно осям:
получается эллипса, ориентированный параллельно осям:
![]() ,
,
а значению ![]() соответствует уравнение отрезка прямой
соответствует уравнение отрезка прямой ![]() .
.
В случае, когда оба этих параметра отличны от нуля, с помощью ( 3 ) выразим ![]() и
и ![]() через x/a
и подставим результат в ( 4 ). После несложных преобразований получим уравнение эллипса, ориентация которого определяется величиной :
через x/a
и подставим результат в ( 4 ). После несложных преобразований получим уравнение эллипса, ориентация которого определяется величиной :
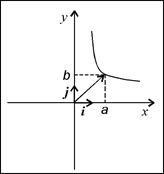
|
Рис. 1. Наклонный эллипс. |

![]() .
.
Роль параметра ясна из Рис. 1. Теперь определим кинематические характеристики траектории и попытаемся выяснить направление действующей силы. На Рис. 1 единичные векторы i и j , направлены вдоль координатных осей. Напишем выражение для радиус-вектора точки, с координатами ( 1 ) и ( 2 ):
![]() .
.
Векторы скорости и ускорения получаются последовательным дифференцированием r:
![]() ,
,
![]() .
.
Из последних двух формул вытекает связь между ускорением и радиус-вектором:
![]() . ( 5
)
. ( 5
)
Мы получили хорошо известное уравнение пространственного осциллятора. Частица массы m движется под действием центральной притягивающей силы, по абсолютной величине равной m2 r .
Пространственный осциллятор является важным методическим инструментом в атомной физике и оптике — двух активно используемых в астрофизике разделах общей физики. Знакомство с ним на семинарах по механике облегчает в дальнейшем освоение темы поляризованного излучения, а также анализ эффектов Зеемана и Штарка.
Задача 2 Точка движется по закону
![]()
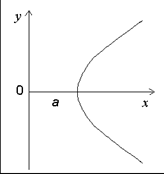
с параметрами a , b и k . Случай k= 0 здесь не представляет интереса. Равенство нулю a или b означает прямолинейное перемещение вдоль одной из координатных осей. Если они оба отличны от нуля, то траектория является отрезком гиперболы y=ab/x .
|
Рис. 2. Гипербола y=ab/x . |
Не теряя общности, мы можем считать a и b положительными[1] . Они равны координатам точки в начальный момент времени:
![]() ,
,
которая в дальнейшем будет двигаться вправо. Вычислим вектор скорости
![]() ,
,
его абсолютную величину
![]()
и вектор ускорения
|
Рис. 3.Повёрнутая гипербола |
![]() .
.
Тело отталкивает центральная сила mk 2 r.
Задача 3. Точка движется в плоскости :
![]() , (
6)
, (
6)
![]() . (
7 )
. (
7 )
Вычтем квадраты уравнений, делённых на a и b соответственно:
![]() .
.
Получилась гипербола, как и на Рис. 2, но оси координат повёрнуты на 45°. Её график приведён на Рис. 3. Дифференцируя (6) и (7) по времени, получим вектор скорости
![]()
и ускорения
![]() .
.
Легко убедиться, что и здесь на тело действует отталкивающая сила F= mk2 r . Итак, одна и та же сила может обуславливать внешне различающиеся типы движения. На частном примере мы увидели проявление важного принципа: динамический закон является более общей характеристикой движения, чем кинематические параметры.
|
Рис. 4. Винтовая линия |
Задача 4. Заряженная частица совершает пространственное движение в однородном и постоянном магнитном поле:

с постоянными параметрами R, vz, w . Складывая квадраты первых двух уравнений, получаем винтовую линию
![]()
с шагом![]() . Винтовая линия изображена на Рис. 4. Из закона движения вытекают следующие выражения для вектора скорости
. Винтовая линия изображена на Рис. 4. Из закона движения вытекают следующие выражения для вектора скорости
![]()
и квадрата его модуля [1] Знаки a и b определяют квадрант, в котором находится гипербола.