Разработка анимационно-обучающей программы механической системы
СОДЕРЖАНИЕ: Механические системы и анимационное моделирование. Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой). Создание анимационно-обучающей программы механической системы, текст программы и описание ее установки.Содержание
Введение
Глава 1. Механические системы и анимационное моделирование.
§ 1.1 Некоторые аспекты создания модели механической системы.
§ 1.1.1 Механические системы. Центр масс.
§ 1.1.2 Количество движения системы тел, закон сохранения количества движения
§ 1.1.3 Движение центра масс механической системы.
§ 1.1.4 Движение тел переменной массы. Уравнение Мещерского. Формула Циалковского.
§ 1.2 Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой).
§ 1.3 Анимационное моделирование процесса обучения механических систем.
Глава 2. Анимационно – обучающий метод механической системы.
§ 2.1 Анимация механической системы.
§ 2.1.1 Обучающие программы.
§ 2.1.2 Описание установки.
§ 2.1.3 Алгоритмизация анимационно – обучающей механической системы.
§ 2.2 Инструкция пользования анимационно-обучающей программы “Water Program”
§ 2.3 Текст анимационно – обучающей программы механической системы.
Заключение.
Список использованной литературы.
Введение
При изучения двух тел закон движения одного или двух тел не исчерпывает всех возможных задач о механическом движений с которыми мы сталкиваемся при изучений природы и в технике. Не редко приходиться иметь дело с движением совокупности взаимодействующих между собой тел, или с движением как говорят механической системы. При изучения или обучения таких систем приходиться рассматривать процесс системно. То есть каждую часть этой системы надо представить эту систему в частности и в комплексе учитывая взаимодействие этих систем. Создание физических установок для изучения свойства этих систем является очень сложной задачи. Но с другой стороны с помощью анимационных методов компьютерного моделирования можно создать виртуальной установки свойств механических систем. Такие виртуальные установки при обучения играет не заменимую роль. Так как с помощью этого метода можно полностью не только изучить , но даже визуально представить внутренние движение механической системы. Тем самым можно сказать об актуальности создание таких установок. С другой стороны создание виртуальных установок связанно с созданием концептуальной модели механической системы. Это раз. Второе – алгоритмизации этой модели. Третье – компьютерной реализаций этих алгоритмов. В комплексе решение этих проблем является обязанностью любого информатика.
В принципе создание комплексной модели требует от информатика глубокого знания предложной области. А алгоритмизация выражает способность математическое мышление информатика. В принципе всегда основные анимационные методы заключается – искусственные представление движение в кино, на телевидение или в комплексной графике путем отображения последовательности рисунков или кадров частотой, при которой обеспечивается целостное зрительное восприятие образов. С другой стороны после создания виртуальной анимационной программы установки нам представляет разработки педагогических методов обучения на этой установке. Связи с этим создание анимационной обучающий программы для изучения движения тела с переменной массы является востребованной.
ГЛАВА1.МЕХАНИЧЕСКИЕ СИСТЕМЫ И АНИМАЦИОННЫЕ МОДЕЛИРОВАНИЕ
§ 1.1 Некоторые аспекты создания модели механической системы
§1.1.1 Механические системы. Центр масс
Мы при мы изучении взаимодействия двух тел и часто, рассматривая движение одного тела, заменяли другое, с которым первое взаимодействует, соответствующей силой. Но изучение законов движения одного или двух тел не исчерпывает всех возможных задач о механическом движении, с которыми мы сталкиваемся при изучении природы или в технике. Нередко приходится иметь дело с движением совокупности взаимодействующих между собой тел, или с движением, как говорят, механической системы . Пример механических систем : любая машина, тепловоз с вагонами, Солнце и планеты, ракетный поезд и т. п., а также любое тело, если в данной задаче его приходится рассматривать как совокупность частиц.
Если движение таково, что размеры и форма отдельных тел, образующих систему, не играют роли, то рассматривается задача о движении системы материальных точек .
Силы, действующие между телами системы, называются внутренними для данной системы силами.
Силы, действующие на тела системы со стороны тел, не входящих в данную систему, называются внешними силами.
Одна и та же сила в зависимости от постановки задачи может быть внутренней или внешней. Например, силы взаимного притяжения планет и Солнца - внутренние силы, если мы рассматриваем солнечную систему как целое, и внешние по отношению к каждой отдельно взятой планете, когда, скажем , мы решаем задачу о движении Земли и Луны, о приливных явлениях на поверхности Земли и т. п.
Под воздействием сил каждая из материальных точек системы, вообще говоря, как-то изменяет состояние своего движения, перемещаясь относительно других точек. Чтобы исследовать движение системы в целом, надо, очевидно, исследовать движение каждой ее точки. Мы могли бы воспользоваться для этого законами Ньютона, составить уравнения движения каждой точки системы и решить их. Но такой путь решения задачи о движении системы часто оказывается весьма сложным либо вследствие того, что трудно определить внутренние силы в виде известной функции (например, при быстро протекающих взаимодействиях тел типа удара), либо потому, что исследуемая система состоит из очень большого числа материальных точек (например, при исследовании движения некоторого объема жидкости). Однако в ряде случаев, как увидим дальше, оказывается возможным обойти эти затруднения.
Введем понятие центра масс системы тел. В элементарной физике вводится понятие центра тяжести как точки приложения равнодействующей сил тяжести, действующих на элементы тел. Введем более общее понятие, не зависящее от силы тяжести центр масс системы. Центром масс двух материальных точек называется точка, делящая расстояние между ними в отношении, обратно пропорциональном их массам
(рис. 1.). усть имеем две материальные точки массой m1
и m2
, координаты которых в неподвижной системе отсчета соответственно x1,
y1
, z1
и x2
, y2
, z2
. По известному правилу аналитической геометрии координаты точки x, y, z, делящей отрезок в заданном отношении ![]()
Связаны с координатами концов отрезка следующим соотношением.
Решая эти равенства относительно x, y, z, получим:
![]()
![]()
Центром масс трех материальных точек называется точка, которая делит расстояние между центром масс двух из них и третьей точкой в отношении, обратно пропорциональном сумме масс двух первых и массе третьей из них.
Легко получить координаты центра масс трех материальных точек, подобно тому как это сделано выше для двух точек:
 |
m2 =2
m1 =1
m3 =12
Рис.1. К определению центра масс материальных точек:
![]() -центр масс m1
и m2
;
-центр масс m1
и m2
;
![]() - центр масс m1
, m2
и m3
;
- центр масс m1
, m2
и m3
;
![]()
![]()
![]()
Прибавляя к системе четвертую, пятую и т. д. точки, получим, что координаты центра масс системы n материальных точек:



§ 1.1.2 Количество движения системы тел. Закон сохранения количества движения
Рассмотрим действие друг на друга двух изолированных тел не взаимодействующих с другими телами. Будем считать силы во все время взаимодействия постоянными. В соответствии со вторым законом динамики изменение количества движения первого тела:
![]()
где ![]() - интервал времени взаимодействия .
- интервал времени взаимодействия .
Изменение количества движения второго тела:
![]()
где ![]() -сила, действующая со стороны первого тела на второе.
-сила, действующая со стороны первого тела на второе.
Согласно третьему закону Ньютона
![]()
и, кроме того, очевидно,
![]()
Следовательно,
![]()
или
![]()
Независимо от природы сил взаимодействия и длительности их действия общее количество движения двух изолированных тел остается постоянным.
Полученный результат может быть распространен на любое число взаимодействующих тел и на силы, меняющиеся со временем. Для этого интервал времени ![]() в течение которого происходит взаимодействие тел, разобьем на столь малые промежутки
в течение которого происходит взаимодействие тел, разобьем на столь малые промежутки ![]() в течение каждого из которых силу можно с заданной степенью точности считать постоянной. В течение каждого промежутка времени будет выполняться соотношение (1.8). Следовательно, оно будет справедливо и для всего интервала времени
в течение каждого из которых силу можно с заданной степенью точности считать постоянной. В течение каждого промежутка времени будет выполняться соотношение (1.8). Следовательно, оно будет справедливо и для всего интервала времени ![]()
Для обобщения вывода на ![]() взаимодействующих тел введем понятие замкнутой системы.
взаимодействующих тел введем понятие замкнутой системы.
Замкнутой называется система тел, для которой результирующая внешних сил равна нулю.
Пусть ![]() материальных точек массами
материальных точек массами ![]() образуют замкнутую систему. Изменение количества движения каждой из этих точек в результате взаимодействия ее со всеми остальными точками системы соответственно:
образуют замкнутую систему. Изменение количества движения каждой из этих точек в результате взаимодействия ее со всеми остальными точками системы соответственно:
![]()
Обозначим внутренние силы, действующие на точку массой ![]() со стороны других точек , через
со стороны других точек , через ![]() на точку массой
на точку массой ![]() и т. д. (Первый индекс обозначает точку, на которую действует сила; второй индекс указывает точку, ос стороны которой действует сила. )
и т. д. (Первый индекс обозначает точку, на которую действует сила; второй индекс указывает точку, ос стороны которой действует сила. )
Запишем в принятых обозначениях второй закон динамики для каждой точки в отдельности:
![]()
![]()
![]()
![]()
![]()
Число уравнений равно числу ![]() тел системы. Чтобы найти общее изменение количества движения системы, нужно подсчитать геометрическую сумму изменений количества движения всех точек системы. Просуммировав равенства (1.9), мы получим в левой части полный вектор изменения количества движения системы за время,
тел системы. Чтобы найти общее изменение количества движения системы, нужно подсчитать геометрическую сумму изменений количества движения всех точек системы. Просуммировав равенства (1.9), мы получим в левой части полный вектор изменения количества движения системы за время, ![]() а в правой части – элементарный импульс результирующей всех сил, действующих в системе. Но так как система замкнута, то результирующая сил равна нулю. В самом деле, по третьему закону динамики каждой силе
а в правой части – элементарный импульс результирующей всех сил, действующих в системе. Но так как система замкнута, то результирующая сил равна нулю. В самом деле, по третьему закону динамики каждой силе ![]() в равенствах (1.9) соответствует сила
в равенствах (1.9) соответствует сила ![]() причем
причем
![]() т. е.
т. е. ![]() и т. д.,
и т. д.,
и результирующая этих сил равна нулю. Следовательно, во всей замкнутой системе изменение количества движения равно нулю:
![]()
или
![]() =const. (1.11)
=const. (1.11)
полное количество движения замкнутой системы – величина постоянная во все время движения (закон сохранения количества движения ).
Закон сохранения количества движения – один из фундаментальных законов физики, справедливый как для систем макроскопических тел, так и для систем, образованных микроскопическими телами: молекулами, атомами и т. п.
Если на точки системы действуют внешние силы, то количество движения, которым обладает система, изменяется.
Напишем уравнения (1.9), включив в них результирующие внешних сил ![]() действующих соответственно на первую, вторую и т. д. До
действующих соответственно на первую, вторую и т. д. До ![]() -й точки:
-й точки:
![]()
![]()
![]()
![]()
![]()
Сложив левые и правые части уравнений, мы получим: слева – полный вектор изменения количества движения системы; справа – импульс результирующей внешних сил:
![]()
или, обозначая результирующую внешних сил ![]() :
:
![]()
т. е.
изменение полного количества движения системы тел равно импульсу результирующей внешних сил.
Равенство (1.13) может быть записано в другом виде:
![]()
т. е.
производная по времени от общего количества движения системы точек равна результирующей внешних сил, действующих на точки системы.
![]()
Проецируя векторы количества движения системы и внешних сил на три взаимно перпендикулярные оси, вместо векторного равенства (6.14) получим три скалярных уравнения вида:
![]()
![]()
![]()
Если вдоль какой-либо оси, скажем ![]() , составляющая результирующей внешних сил равна нулю, то количество движения вдоль этой оси не изменяется, т. е., будучи вообще незамкнутой, в направлении
, составляющая результирующей внешних сил равна нулю, то количество движения вдоль этой оси не изменяется, т. е., будучи вообще незамкнутой, в направлении ![]() система может рассматриваться как замкнутая.
система может рассматриваться как замкнутая.
Мы рассмотрели передачу механического движения от одних тел к другим без перехода его в другие формы движения материи.
Величина «mv оказывается здесь мерой просто перенесенного, т. е. продолжающегося, движения… ».
Применение закона изменения количества движения к задаче о движении системы тел позволяет исключить из рассмотрения все внутренние силы, что упрощает теоретическое исследования и решения практических задач.
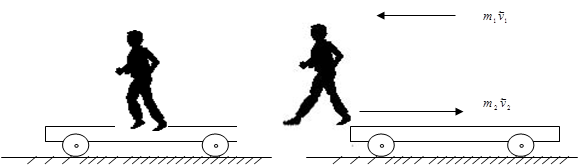
1.Пусть на покоящейся тележке неподвижно стоит человек (рис. 2. а). Количество движения системы человек – тележка равно нулю. Замкнута ли эта система? На нее действуют внешние силы – сила тяжести и сила трения между колесами тележки и полом. Вообще говоря, система не замкнута. Однако, поставив тележку на рельсы и соответствующим образом обработав поверхность рельсов и колес, т. е. значительно уменьшив трение между ними, можно силой трения пренебречь.
Сила тяжести, направления вертикально вниз, уравновешивается реакцией деформированных рельсов, и результирующая этих сил не может сообщить системе горизонтального ускорения, т. е. не может изменить скорость, а следовательно, и количество движения системы. Таким образом, мы можем с известной степенью приближения считать данную систему замкнутой.
Положим теперь, что человек сходит с тележки влево(рис. 2. б), имея скорость ![]() . Чтобы приобрести эту скорость , человек должен, сократив свои мышцы, подействовать ступнями ног на площадку тележки и деформировать ее. Сила, действующая со стороны деформированной площадки на ступни человека, сообщает телу человека ускорение влево, а сила, действующая со стороны деформированных ступней человека (в соответствии с третьим законом динамики), сообщает тележке ускорение вправо. В результате, когда взаимодействие прекратится (человек сойдет с тележки), тележка приобретает некоторую скорость
. Чтобы приобрести эту скорость , человек должен, сократив свои мышцы, подействовать ступнями ног на площадку тележки и деформировать ее. Сила, действующая со стороны деформированной площадки на ступни человека, сообщает телу человека ускорение влево, а сила, действующая со стороны деформированных ступней человека (в соответствии с третьим законом динамики), сообщает тележке ускорение вправо. В результате, когда взаимодействие прекратится (человек сойдет с тележки), тележка приобретает некоторую скорость ![]() .
.
Для нахождения скоростей ![]() и
и ![]() с помощью основных законов динамики надо было бы знать, как меняются силы взаимодействия человека и тележки со временем и где приложены эти силы. Закон сохранения количества движения позволяет сразу найти отношение скоростей человека и тележки, а также указать их взаимную направленность, если известны значения масс человека
с помощью основных законов динамики надо было бы знать, как меняются силы взаимодействия человека и тележки со временем и где приложены эти силы. Закон сохранения количества движения позволяет сразу найти отношение скоростей человека и тележки, а также указать их взаимную направленность, если известны значения масс человека ![]() и тележки
и тележки ![]() .
.
Пока человек неподвижно стоит на тележке, общее количество движения системы остается равным нулю:
![]()
Отсюда
![]()
или
![]()
Скорости, приобретенные человеком и тележкой, обратно пропорциональны их массам. Знак «минус» указывает на их противоположную направленность.
2.Если человек, двигаясь со скоростью ![]() , вбегает на неподвижно стоящую тележку и останавливается на ней, то тележка приходит в движение, так что общее количество движения ее и человека оказывается равным количеству движения, которым обладал раньше человек один:
, вбегает на неподвижно стоящую тележку и останавливается на ней, то тележка приходит в движение, так что общее количество движения ее и человека оказывается равным количеству движения, которым обладал раньше человек один:
![]()
3.Человек, движущийся со скоростью ![]() ,вбегает на тележку, перемещающуюся ему навстречу со скоростью
,вбегает на тележку, перемещающуюся ему навстречу со скоростью ![]() , и останавливается на ней. Далее система человек – тележка движется с общей скоростью
, и останавливается на ней. Далее система человек – тележка движется с общей скоростью ![]() Общее количество движения человека и тележки равно сумме количеств движения, которыми они обладали каждый в отдельности:
Общее количество движения человека и тележки равно сумме количеств движения, которыми они обладали каждый в отдельности:
![]()
4. Использовав то обстоятельство ,что тележка может перемещаться только вдоль рельсов, можно продемонстрировать векторный характер изменения количества движения. Если человек входит и останавливается на неподвижной до этого тележке один раз вдоль направления возможного ее движения, второй раз – под углом 45є, а третий – под углом 90є к этому направлению, то во втором случае скорость, приобретенная тележкой, примерно в полтора раза меньше, чем в первом ![]() , а в третьем случае тележка неподвижна
, а в третьем случае тележка неподвижна ![]() .
.
§1.1.3 Движение центра масс механической системы
Покажем, что поступательное движение механической системы как целого можно характеризовать движением одной точки – центра масс системы, считая, что в ней сосредоточена масса всех тел, входящих в систему.
Перепишем равенства (6.4) в виде
![]()
![]()
![]()
продифференцируем по времени:
![]()
![]()
![]()
В равенствах (6.17) слева стоит произведение суммарной массы тел ![]() образующих систему, и компонент
образующих систему, и компонент ![]() представляющих собой слагающие скорости движения центра масс системы по осям координат, а справа – компоненты вектора полного количества движения тел системы:
представляющих собой слагающие скорости движения центра масс системы по осям координат, а справа – компоненты вектора полного количества движения тел системы:
![]()
Полное количество движения механической системы равно количеству движения материальной точки массой, равной массе тел системы и движущейся, как движется ее центр масс.
Продифференцируем равенство (1.18) по времени и сравним с выражением (1.14). В равенстве (1.18) после дифференцирования справа, а в равенстве (1.14) слева стоит одна и та же величина – производная от вектора полного количества движения тел системы. Следовательно,
![]()
![]()
где ![]() - количество движения центра масс системы,
- количество движения центра масс системы, ![]() - вектор результирующей внешних сил, действующих на тела системы.
- вектор результирующей внешних сил, действующих на тела системы.
Центр масс механической системы движется так же, как двигалась бы материальная точка, в которой сосредоточена масса всех тел системы, под действием результирующей внешних сил, приложенных к телам, образующим систему.
Если механическая система замкнута, т. е. ![]() то
то
![]() =const.
=const.
Центр масс замкнутой механической системы находится в покое или движется равномерно и прямолинейно.
Закон движения центра масс механической системы не дает полной картины движения отдельных ее тел, но позволяет установить некоторые важные особенности движения системы в целом.
Рассмотрим, например, движение солнечной системы. С большой степенью точности ее можно считать замкнутой, пренебрегая взаимодействием с другими космическими телами. Следовательно, центр масс солнечной системы можно считать движущимся прямолинейно и равномерно.
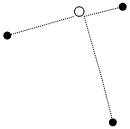
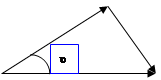
Рассмотрим твердое тело, находящееся в покое. Положим, на него одновременно подействовали двумя силами, равными по величине, но противоположно направленными и приложенными в двух точках A и B, не совпадающих с центром масс (рис. 3). Такая система сил называется парой сил. Каков характер движения тела?
Рис.3. Тело под действием сил поворачивается вокруг центра масс.
Результирующая приложенных к телу внешних сил равна нулю. Следовательно , центр масс тела должен остаться в покое. Тело, одна точка которого неподвижна, может, очевидно, только вращаться вокруг этой точки. И следовательно, тело под действием приложенной пары сил будет поворачиваться вокруг центра масс C. Иногда, руководствуясь только интуицией, приходят к ошибочному заключению, что в описанном случае тело должно вращаться вокруг точки О, расположенной между точками приложения пары сил.
§ 1.1.4 Движеие тел переменной массы. Уравнение мещерского. Формула циолковского
В природе и современной технике мы нередко сталкиваемся с движением тел, масса которых меняется со временем. Масса земли возрастет вследствие падения на нее метеоритов, масса метеорита при полете в атмосфере уменьшается в результате отрыва или сгорания его частиц, масса дрейфующей льдины возрастет при намерзании и убывает при таянии и т. д. Движение якоря с якорной цепью, когда все большее число звеньев цепи сходит с лебедки, -пример движения тела переменной массы. Ракеты все систем, реактивные самолеты, реактивные снаряды и мины также являются телами, масса которых изменяется во время движения.
Общие законы динамики тел с переменной массой были открыты и исследованы И. В. Мещерским и К. Э. Циолковским. Циолковским были разработаны фундаментальные проблемы реактивной техники, которые в наши дни служат основной для штурма человеком межпланетных пространств.
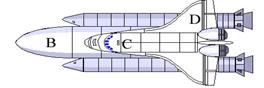
Для вывода основного уравнения движения тела переменной массы рассмотрим конкретный случай движения простейшей ракеты (рис. 4).
Мы будем рассматривать ракету достаточно малое тело, положение центра тяжести которого не меняется по мере сгорания пороха. В этом случае мы можем считать ракету материальной точкой переменной массы, совпадающей с центром тяжести ракеты.
 |
Не рассматривая физико-химическую природу сил, возникающих при отбрасывании от ракеты газов, образованных при сгорании пороха, сделаем такое упрощающее вывод предположение.
Рис.4. Схема порохового снаряда: А-вырывается; В - граната с взрывателем; С – пороховая ракетная камера; D - стабилизатор.
Будем считать , что отбрасываемая от ракеты частица газа dM взаимодействует с ракетой M только в момент их непосредственного контакта. Как только частица dM приобретает скорость относительно точки M, ее воздействие на нее прекращается. Предположим далее, что изменение массы ракеты M происходит непрерывно, без скачков. (Это значит, что мы не рассматриваем многоступенчатые ракеты, масса которых меняется скачкообразно. ) Это предположение позволяет считать, что существует производная от массы по времени.
Пусть в момент t масса ракеты M, а ее скорость относительно неподвижной системы координат ![]() (рис. 5). Положим, за время dt от ракеты отделилась частица массы (-dM) со скоростью (относительно той же неподвижной системы координат ), равной
(рис. 5). Положим, за время dt от ракеты отделилась частица массы (-dM) со скоростью (относительно той же неподвижной системы координат ), равной ![]() .
.
Знак «минус» перед приращением массы указывает на то, что приращение это отрицательное, масса ракеты убывает.
Положим, равнодействующая внешних сил, действующих на ракету (силы тяжести и сопротивления среды), F. Как сказано выше, в момент отделения частицы массы (-dM) между ней и ракетой действует неизвестная нам реактивная сила ![]() . Сила
. Сила ![]() для системы ракета – частица является внутренней. Чтобы исключить
для системы ракета – частица является внутренней. Чтобы исключить
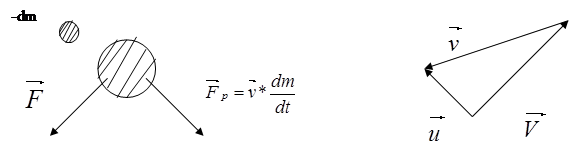 |
Рис.5.К выводу уравнения движения тела переменной массы.
ее из смотрения, вспользуеамя законом изменения количества движения. Количество движения системы ракета – частица а момент t, т. е. перед отделением частицы:
![]()
Количество движения системы в момент ![]() (после отделения частицы) складывается из количества движения массы
(после отделения частицы) складывается из количества движения массы ![]() , получившей скорость
, получившей скорость ![]() , и количества движения массы частицы – dM, летящей со скоростью
, и количества движения массы частицы – dM, летящей со скоростью ![]() :
:
![]()
Изменение количества движения системы за время dt:
![]()
(мы отбросили член второго порядка малости ![]() ). Величина
). Величина ![]() должна
должна ![]() быть приравнена импульсу равнодействующей внешних сил:
быть приравнена импульсу равнодействующей внешних сил:
![]()
Отсюда, перегруппировав члены и разделив на dt, получим основное уравнение движения точки переменной массы:
![]()
Это уравнение иначе называют уравнением Мещерского. Для ракеты ![]()
![]() , так как при полете масса ее убывает. Если масса тела во время движения увеличивается, то
, так как при полете масса ее убывает. Если масса тела во время движения увеличивается, то ![]() . При
. При ![]() уравнение (1.22) переходит в уравнение второго закона Ньютона для случая постоянной массы. Величина
уравнение (1.22) переходит в уравнение второго закона Ньютона для случая постоянной массы. Величина ![]() есть скорость выбрасываемых ракетой частиц относительно системы координат, движущейся с ракетой. Эту скорость называют обычно просто относительной скоростью V. Тогда равенство (1.22) запишется в виде
есть скорость выбрасываемых ракетой частиц относительно системы координат, движущейся с ракетой. Эту скорость называют обычно просто относительной скоростью V. Тогда равенство (1.22) запишется в виде
![]()
Второй член правой части равенства (1.23) представляет собой реактивную силу, действующую на массу M со стороны вылетевшей частицы dM.
Для любого момента времени произведение массы тела на его ускорение равно векторной сумме равнодействующей приложенных к телу внешних сил и реактивной силы. При движении ракеты вблизи Земли равнодействующая внешних сил представляет собой сумму силы тяжести и силы сопротивления воздуха. Ускорение ракеты зависит еще и от реактивной силы, изменяя величину и направление которой можно управлять полетом ракеты.
Если относительная скорость отбрасываемых частиц равна нулю: ![]() ,то из формулы(1.22) следует:
,то из формулы(1.22) следует:
![]()
т. е. если относительная скорость отбрасываемых частиц равна нулю, то уравнение движения точки переменной массы имеет формально тот же вид, что и для точки постоянной массы, но в этом случае масса M- функция времени t.
Важный вклад в механику тел переменной массы применительно к конкретным задачам реактивной техники внесен знаменитым русским ученым Константином Эдуардовичем Циолковским. В 1903 г. была издана его работа «Исследование мировых пространств реактивными приборами», в которой К. Э. Циолковский исследовал ряд случаев прямолинейных движений ракет. К. Э. Циолковским обоснована и доказана возможность практического использования реактивного движения. Им найдены условия, при которых можно получить скорости, достаточные для осуществления космического полета. Полученная им формула, связывающая скорость ракеты с ее начальной массой, до сих пор используется для предварительных расчетов. В работах 1911-1914 гг. он изучил вопрос о величине запасов топлива, необходимых для преодоления сил тяготения Земли, и предложил высококалорийное топливо, позволяющее получить большие скорости истечения газовых струй. К. Э. Циолковского по праву считают изобретателем жидкостных ракет дальнего действия и основоположником теории межпланетных полетов.
Ему принадлежит идея разработки теории так называемых многоступенчатых ракет, когда на некоторых интервалах времени масса ракеты меняется непрерывно, а в некоторые моменты – скачком. Им проведены большие исследования по оценке сил сопротивления при движении тел переменной массы. К. Э. Циолковским поставлен целый ряд оригинальных проблем, имеющих решающее значение для развития реактивной техники.
Для того чтобы выяснить основные факторы, создающие возможность реактивного движения с большими скоростями, рассмотрим движение точки переменной массы безвоздушном пространстве (отсутствует сопротивление движению тела), без действия внешних сил (силы тяготения) . предположим, что скорость истечения частиц направлена прямо противоположно вектору скорости тела ![]() . Эти условия соответствуют так называемой первой задаче Циолковского. В результате получаем формулу Циолковского и следствие из нее. Найдем при сделанных предположениях скорость движения тела (точки) и закон ее движения.
. Эти условия соответствуют так называемой первой задаче Циолковского. В результате получаем формулу Циолковского и следствие из нее. Найдем при сделанных предположениях скорость движения тела (точки) и закон ее движения.
При сформулированных условиях уравнение движения приобретает вид:
![]()
или
![]()
Положим, ![]() , где
, где ![]() - функция, определяющая закон изменения массы. Очевидно, так как начальная масса
- функция, определяющая закон изменения массы. Очевидно, так как начальная масса ![]() , то функция
, то функция ![]() при
при ![]() должна быть
должна быть ![]() . Подставив в (1.26) значение M и проинтегрировав, получим:
. Подставив в (1.26) значение M и проинтегрировав, получим:
![]()
Для определения постоянной С учетом, что при ![]() , тогда
, тогда ![]()
и
![]()
Эта формула носит название формулы Циолковского. Из формулы следует, что скорость, приобретенная точкой переменной массы, зависит от относительной скорости V и отношения начальной массы к остающейся к концу процесса горения. Если масса точки в конце процесса горения ![]() , отброшенная масса (масса топлива) – m, то при нулевой начальной скорости (
, отброшенная масса (масса топлива) – m, то при нулевой начальной скорости (![]() ) получаем для расчета скорости
) получаем для расчета скорости ![]() в конце процесса горения выражения:
в конце процесса горения выражения: 
Отношение ![]() называют число Циолковского. Для современных ракет можно положить
называют число Циолковского. Для современных ракет можно положить ![]() . Тогда при числе Циолковского Z=0,250; 9,000; 32,333; 999,000 получим соответственно скорости
. Тогда при числе Циолковского Z=0,250; 9,000; 32,333; 999,000 получим соответственно скорости ![]() .
.
Из формулы Циолковского (1.27) следует , что:
1) Скорость точки переменной массы в конце активного участка (в конце процесса отбрасывания частиц) тем больше, чем больше скорость отбрасывания частиц;
2) Скорость в конце активного участка тем больше, чем больше число Циолковского;
3) Скорость точки переменной массы в конце активного участка не зависит от закона изменения массы (режима горения). Заданному числу Циолковского соответствует определенная скорость точки в конце процесса горения не зависимо от того, быстро или медленно шло горения. Это следствие является проявлением закона сохранения количества движения;
4) Для получения возможно больших скоростей точки переменной массы в конце активного участка выгоднее идти по пути увеличения относительной скорости отбрасывания частиц, чем по пути увеличения запасов топлива.
§1.2 Некоторые задачи моделирования механических систем (на примере движение тела с переменной массой)
Имеется много случаев, когда масса тела изменяется в процессе движения за счет непрерывного отделения или присоединения вещества (ракета, реактивный самолет, платформа, нагружаемая на ходу, и др.).
Наша задача: найти уравнение движения такого тела.
Рассмотрим решение этого вопроса для материальной точки, называя ее для краткости телом. Пусть в некоторой момент времени ![]() масса движущего тела A равна m, а присоединяемая (или отделяемая) масса имеет скорость u относительно данного тела.
масса движущего тела A равна m, а присоединяемая (или отделяемая) масса имеет скорость u относительно данного тела.
Введем вспомогательную инерциальную K-систему отсчета, скорость которой такова же, как и скорость тела A в данный
момент ![]() . Это значит, что а момент
. Это значит, что а момент ![]() тело A покоится в K- системе.
тело A покоится в K- системе.
Пусть далее за промежуток времени от ![]() до
до ![]() тело A приобретает в K-системе импульс
тело A приобретает в K-системе импульс ![]() . Этот импульс тело A получит, во-первых, вследствие присоединения (отделения) массы
. Этот импульс тело A получит, во-первых, вследствие присоединения (отделения) массы ![]() , которая приносит (уносит) импульс
, которая приносит (уносит) импульс ![]() , и, во-вторых, вследствие действия силы F со стороны окружающих тел или силового поля. Таким образом, можно записать , что
, и, во-вторых, вследствие действия силы F со стороны окружающих тел или силового поля. Таким образом, можно записать , что
![]() ,
,
где знак плюс соответствует присоединению массы, а знак минус – отделению. Оба эти случая можно объединить, представив ![]() в виде приращения
в виде приращения ![]() массы тела A (действительно, в случае присоединения массы
массы тела A (действительно, в случае присоединения массы ![]() , а в случае отделения
, а в случае отделения ![]() ). Тогда предыдущее уравнение примет вид
). Тогда предыдущее уравнение примет вид
![]() .
.
Поделив это выражение на ![]() , получим
, получим
![]()
где ![]() - скорость присоединяемого (или отделяемого) вещества относительно рассматриваемого тела.
- скорость присоединяемого (или отделяемого) вещества относительно рассматриваемого тела.
Это уравнение является основным уравнением динамики материальной точки с переменной массой. Его называют уравнением Мещерского. Будучи полученным в одной инерциальной системе отсчета, это уравнение в силу принципа относительности справедливо и в любой другой инерциальной системе. Заметим , что если система отсчета неинерциальная, то под силой F следует понимать результирующую как сил взаимодействия данного тела с окружающими телами, так и сил инерции.
Последний член уравнения (1.26) носит название реактивной силы
: ![]() . Эта сила возникает в результате действия на данное тело присоединяемой (или отделяемой) массы. Если масса присоединяется, то
. Эта сила возникает в результате действия на данное тело присоединяемой (или отделяемой) массы. Если масса присоединяется, то ![]() и вектор R совпадает по направлению с вектором u; если же масса отделяется, то
и вектор R совпадает по направлению с вектором u; если же масса отделяется, то ![]() и вектор R противоположен вектору u.
и вектор R противоположен вектору u.
Уравнение Мещерского по своей форме совпадает с основным уравнением динамики материальной точки постоянной массы: слева – произведение массы тела на ускорение, справа – действующие на него силы, включая реактивную силу. Однако в случае переменной массы нельзя внести массу ![]() под знак дифференцирования и представить левую часть уравнения как производную по времени от импульса, ибо
под знак дифференцирования и представить левую часть уравнения как производную по времени от импульса, ибо ![]() ,
,
Обратим внимание на два частных случая.
1. Если u=0. т. е. масса присоединяется или отделяется без скорости относительно тела, то R=0, и уравнение (1.26) принимает вид
![]()
где ![]() - масса тела в данный момент времени. Это уравнение определяет , например, движение платформы, из которой свободно высыпается песок (см. задачу 10, пункт 1-й).
- масса тела в данный момент времени. Это уравнение определяет , например, движение платформы, из которой свободно высыпается песок (см. задачу 10, пункт 1-й).
2. Если u=-v, т. е. присоединяемая масса неподвижна в выбранной системе отсчета или отделяемая масса становится неподвижной в этой системе, то уравнение (1.28) принимает другой вид
![]()
или
![]()
иначе говоря, в этом частном случае – и только этом – действие силы F определяет изменение импульса тела с переменной массой. Данный случай реализуется, например, при движении платформы, нагружаемой сыпучим веществом из неподвижного бункера (см. задачу 10, пункт 2-й).
Рассмотрим пример на применение уравнения Мещерского.
Пример.
Ракета движется в инерциальной K-системе отсчета в отсутствие внешнего силового поля, причем так, что газовая струя вылетает с постоянной относительно ракеты скоростью u. Найти зависимость скорости ракеты от ее массы ![]() , если в момент старта ее масса была равна
, если в момент старта ее масса была равна ![]() .
.
В данном случае F=0 и из уравнения (1.28) следует
![]() .
.
Проинтегрировав это выражение с учетом начальных условий, получим
![]()
где знак минус показывает, что вектор v (скорость ракеты) противоположен по направлению вектору u. Отсюда видно, что скорость ракеты в данном случае (u=const) не зависит от времени сгорания топлива: v определяется только отношением начальной массы ![]() ракеты к оставшейся массе m.
ракеты к оставшейся массе m.
Заметим, что если бы вся масса горючего была одновременно выброшена со скоростью u относительно ракеты , то скоростью последней оказалась бы иной. Действительно, если ракета вначале покоилась в выбранной инерциальной системе отсчета, а после одновременного выброса всего горючего приобрела скорость v, то из закона сохранения импульса для системы ракета – горючее следует
![]() ,
,
где u+v - скорость горючего относительно данной системы отсчета. Отсюда
![]()
скорость ракеты v в этом случае оказывается меньше, чем в предыдущем (при одинаковых значениях отношения ![]() ). В этом нетрудно убедиться, сравнив характер зависимости v от
). В этом нетрудно убедиться, сравнив характер зависимости v от ![]() в обоих случаях. С ростом
в обоих случаях. С ростом ![]() в первом случае (когда вещество отделяется непрерывно) скорость v ракеты, согласно (1), растет неограниченно, во втором же (когда вещество отделяется одновременно) скорость v, согласно (2), стремится к пределу, равному - u.
в первом случае (когда вещество отделяется непрерывно) скорость v ракеты, согласно (1), растет неограниченно, во втором же (когда вещество отделяется одновременно) скорость v, согласно (2), стремится к пределу, равному - u.
Задачи к главе 1
1.1.
Частица движется с импульсом ![]() под действием силы F(t). Пусть a и b – постоянные векторы, причем a ^ b. Полагая, что:
под действием силы F(t). Пусть a и b – постоянные векторы, причем a ^ b. Полагая, что:
1) ![]() , где
, где ![]() - положительная постоянная, найти вектор F в те моменты времени, когда F ^ p;
- положительная постоянная, найти вектор F в те моменты времени, когда F ^ p;
2) ![]() , где
, где ![]() - вектор, противоположный по направлению вектору а, найти вектор p
в момент
- вектор, противоположный по направлению вектору а, найти вектор p
в момент ![]() , когда он окажется повернутым на 90
по отношению к вектору
, когда он окажется повернутым на 90
по отношению к вектору ![]() .
.
Решение. 1. Сила ![]() , т. е. вектор F все время перпендикулярен вектору a. Следовательно, вектор F будет перпендикулярен вектору p
в те моменты, когда коэффициент при b в выражении для
, т. е. вектор F все время перпендикулярен вектору a. Следовательно, вектор F будет перпендикулярен вектору p
в те моменты, когда коэффициент при b в выражении для ![]() обращается в нуль. Отсюда
обращается в нуль. Отсюда ![]() и
и ![]() соответствующие значения вектора F равны:
соответствующие значения вектора F равны:
![]()
2. Приращение вектора p
за промежуток времени ![]() есть
есть ![]() Интегрируя это уравнение с учетом начальных условий, находим
Интегрируя это уравнение с учетом начальных условий, находим
где, по условию, ![]() противоположен вектору а
. Вектор p
окажется перпендикулярным вектору
противоположен вектору а
. Вектор p
окажется перпендикулярным вектору ![]() в момент
в момент ![]() , когда
, когда ![]() . В этот момент
. В этот момент ![]() .
.
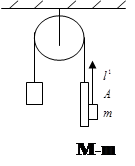 |
Рис. 6
1.2
. Через блок (рис. 6) перекинут шнур на одном конце которого находится лестница с человеком А, а на другом – уравновешивающий груз массы М. Человек , масса которого m, совершил вверх перемещение ![]() относительно лестницы и затем остановился. Пренебрегая массами блока и шнура, а также трением в оси блока, найти перемещение центра инерции этой системы.
относительно лестницы и затем остановился. Пренебрегая массами блока и шнура, а также трением в оси блока, найти перемещение центра инерции этой системы.
Решение. Сначала все тела системы покоились, поэтому приращение импульсов тел при движении равно самим импульсам. Силы натяжения шнура слева и справа одинаковы, а следовательно импульсы груза ![]() и лестницы с человеком
и лестницы с человеком ![]() в каждый момент времени будут равны между собой, т. т.
в каждый момент времени будут равны между собой, т. т. ![]() , или
, или
![]() ,
,
где ![]() v1
, v и v2
- - скорости груза, человека и лестницы. Учитывая , что v2
= -v1
и v=v2
+ v, где v - скорость человека относительно лестницы, получим
v1
, v и v2
- - скорости груза, человека и лестницы. Учитывая , что v2
= -v1
и v=v2
+ v, где v - скорость человека относительно лестницы, получим
![]() v1
= (m/2M)v. (1)
v1
= (m/2M)v. (1)
С другой стороны , импульс всей системы. Отсюда с учетом (1) найдем
![]() .
.
И наконец, искомое перемещение
![]() .
.
Другой способ решения основан на свойстве центра инерции данной системы характеризуется радиусом – вектором
![]() ,
,
где ![]() - радиусы-векторы центров инерции груза M, лестницы и человека относительно некоторой точки О данной системы отсчета. Отсюда перемещение центра инерции
- радиусы-векторы центров инерции груза M, лестницы и человека относительно некоторой точки О данной системы отсчета. Отсюда перемещение центра инерции ![]() равно
равно
![]() ,
,
где
![]() -перемещения груза M, лестницы и человека относительно данной системы отсчета. Имея в виду, что
-перемещения груза M, лестницы и человека относительно данной системы отсчета. Имея в виду, что ![]() получим в результате
получим в результате
![]() .
.
1.3.
система состоит из двух шариков с массами ![]() , которые соединены между собой невесомой пружинкой. Шарикам сообщили скорости
, которые соединены между собой невесомой пружинкой. Шарикам сообщили скорости ![]() , как показано на рис.7, после чего система начала двигаться в однородном поле сил тяжести Земли. Пренебрегая сопротивлением воздуха и считая, что в начальный момент пружинка не деформирована, найти:
, как показано на рис.7, после чего система начала двигаться в однородном поле сил тяжести Земли. Пренебрегая сопротивлением воздуха и считая, что в начальный момент пружинка не деформирована, найти:
1) скорость ![]() центра инерции этой системы в зависимости от времени;
центра инерции этой системы в зависимости от времени;
2) внутреннюю механическую энергию системы в процессе движения.
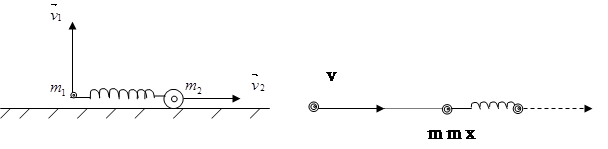 |
Рис. 7 рис. 8
Решение. 1. Приращение вектора скорости центра инерции, есть ![]() . проинтегрировав это уравнение, получим
. проинтегрировав это уравнение, получим ![]() , где
, где ![]() -начальная скорость центра инерции. Отсюда
-начальная скорость центра инерции. Отсюда
![]() .
.
3. Внутренняя механическая энергия системы – это ее энергия
![]() .
.
4.
Шарик с кинетической энергией T, испытав лобовое соударение с первоначально покоившейся упругой гантелью (рис. 8), отлетел в противоположном направлении с кинетической энергией ![]() . Массы всех трех шариков одинаковы. Найти энергию колебаний гантели после удара.
. Массы всех трех шариков одинаковы. Найти энергию колебаний гантели после удара.
Решение. пусть ![]() -импульсы налетающего шарика до и после удара, а
-импульсы налетающего шарика до и после удара, а ![]() -импульс и кинетическая энергия гантели как целого после удара, Е -энергия колебаний. Согласно законам сохранения импульса и энергии,
-импульс и кинетическая энергия гантели как целого после удара, Е -энергия колебаний. Согласно законам сохранения импульса и энергии,
![]() .
.
Из этих двух уравнений с учетом того, что ![]() , получим
, получим
![]() .
.
5
В К-системе частица 1 массы ![]() налетает на покоящуюся частицу 2 массы
налетает на покоящуюся частицу 2 массы ![]() . Заряд каждой частицы равен
. Заряд каждой частицы равен ![]() . Найти минимальное расстояние, на которое они сблизятся при лобовом соударении, если кинетическая энергия частицы 1 вдали от частицы 2 равна
. Найти минимальное расстояние, на которое они сблизятся при лобовом соударении, если кинетическая энергия частицы 1 вдали от частицы 2 равна ![]() .
.
![]()
![]()
![]()
![]()
Рис. 9
Решние . Рассмотрим этот процесс как в К-системе, так и в Ц-системе.
1. В К-системе в момент наибольшего сближения обе частицы будут двигаться как единое целое со скоростью ![]() , которую можно определить на основании закона сохранения импульса:
, которую можно определить на основании закона сохранения импульса:
![]() ,
,
где p1
–импульс налетающей частицы, ![]()
С другой стороны, из закона сохранения энергии следует
![]() ,
,
где приращение потенциальной энергии системы ![]()
Исключив ![]() из этих двух уравнений, найдем
из этих двух уравнений, найдем
![]() .
.
2. В Ц-системе решение наиболее просто: здесь суммарная кинетическая энергия частиц идет целиком на приращение потенциальной энергии системы в момент наибольшего сближения:
![]() ,
,
где , согласно (4.16),
![]()
Отсюда легко найти ![]()
6.
Частица массы ![]() с импульсом
с импульсом ![]() испытала упругое столкновение с покоившейся частицей массы
испытала упругое столкновение с покоившейся частицей массы ![]() . Найти импульс
. Найти импульс ![]() первой частицы после столкновения, в результате которого она рассеялась под углом
первой частицы после столкновения, в результате которого она рассеялась под углом ![]() к первоначальному направлению движения.
к первоначальному направлению движения.
Решение. Из закона сохранения импульса (рис. 69) находим
![]()
где ![]() -импульс второй частицы после столкновения.
-импульс второй частицы после столкновения.
С другой стороны, из закона сохранения энергии следует, что ![]() , где
, где ![]() -кинетические энергии первой и второй частиц после столкновения. Преобразуем это равенство с помощью соотношения
-кинетические энергии первой и второй частиц после столкновения. Преобразуем это равенство с помощью соотношения ![]() к виду
к виду
Если
![]()
то физический смысл имеет только знак плюс перед корнем. Это следует из того, что при этом условии корень будет больше, чем а так как p’
1
– это модуль, то, естественно, он не может быть отрицательным.
Если же m1 m2 , то физический смысл имеют оба знака перед
корнем – ответ в этом случае получается неоднозначным: под углом ![]()
импульс рассеянной частицы может иметь одно из двух значений (это зависит от относительного расположения частиц в момент соударения).
1.7. Какую часть своей кинетической энергии теряет частица массы m1 при упругом рассеянии под предельным углом на покоящейся частице массы m2 , где m1 m2
§ 1.3 Анимационное моделирование процесса обучения механических систем
Эксплуатация реальных физических установок обычно требует серьезных финансовых затрат, а к учебным экспериментам на них, к тому же, предъявляются особые требования по технике безопасности. Поэтому для обучения удобно использовать не реальные установки, а их компьютерные модели. Существующие методы, используемые при разработке программ, позволяют существенно приблизить имитационные эксперименты к реальным.
Разработанная компьютерная анимационная обучающая система моделирует в реальном масштабе времени движение тел, масса которых в процессе движения не остается постоянной. Подобные движения широко встречаются в природе и технике. Наибольший интерес рассмотрение движения тел переменной массы приобретает в тех случаях, когда вследствие изменения массы возникают силы, приводящие в движение эти тела. Эти силы, которые получили название реактивных, обеспечивают полет ракет разных систем, реактивных снарядов, самолетов с воздушно - реактивными двигателями и т. п.
Рассмотрим движение тела, масса которого убывает вследствие того, что из него постоянно выбрасываются частицы с некоторой относительной скоростью u.
Введем понятие расход массы
![]() («скоростью убывания массы»).
(«скоростью убывания массы»).
Изменение импульса системы ![]() за малый промежуток времени
за малый промежуток времени ![]() на основании второго закона Ньютона можно приравнять импульсу внешних сил
на основании второго закона Ньютона можно приравнять импульсу внешних сил ![]() :
: ![]()
Пусть в момент времени ![]() тело имело массу
тело имело массу ![]() и скорость
и скорость ![]() ; импульс его в этот момент
; импульс его в этот момент
![]()
В момент времени ![]() масса этого тела
масса этого тела ![]() , а скорость
, а скорость ![]() ; масса выброшенных частиц
; масса выброшенных частиц ![]() , их скорость в той же системе отсчета
, их скорость в той же системе отсчета ![]() . Импульс системы в момент времени
. Импульс системы в момент времени ![]() будет равен
будет равен
![]()
Пренебрегая бесконечно малой величиной второго порядка ![]() , получаем, вычитая (1) из (2),
, получаем, вычитая (1) из (2),
![]()
или
![]()
Уравнение (4) представляет собой закон движения тела, выбрасывающего часть своей массы со скоростью ![]() при ежесекундном расходе
при ежесекундном расходе ![]() . Из этого выражения следует, что в случае движения тела с переменной массой произведение массы движущегося тела на ускорение определяется не только равнодействующей приложенных к ней внешних сил
. Из этого выражения следует, что в случае движения тела с переменной массой произведение массы движущегося тела на ускорение определяется не только равнодействующей приложенных к ней внешних сил ![]() , но и реактивной силой, равной произведению расхода массы в секунду
, но и реактивной силой, равной произведению расхода массы в секунду ![]() на относительную скорость движения отбрасываемых частиц
на относительную скорость движения отбрасываемых частиц ![]() . Реактивная сила направлена противоположно скорости, с которой выбрасываемые частицы покидают тело. Уравнение движения тела переменной массы впервые было получено И. В. Мещерским. На основании этого уравнения К. Э. Циолковским впервые были намечены пути решения проблемы космических полетов.
. Реактивная сила направлена противоположно скорости, с которой выбрасываемые частицы покидают тело. Уравнение движения тела переменной массы впервые было получено И. В. Мещерским. На основании этого уравнения К. Э. Циолковским впервые были намечены пути решения проблемы космических полетов.
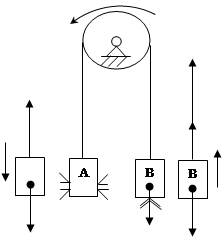
Рис.1
На рис. 1 представлена простейшая механическая модель, позволяющая не только измерить реактивную силу, но и проследить основные закономерности движения тел переменной массы. Основными элементами этой установки являются два цилиндра А и В, соединенные нитью, перекинутой через неподвижный блок С. Цилиндры полые, равного объема и массы. Один из них В имеет одно отверстие в середине дна, другой А – два одинаковых противоположно расположенных отверстия в боковых поверхностях. Оба цилиндра наполняются водой. Отверстия в них выполнены так, что масса воды, вытекающей в единицу времени (расход), одинакова для обоих цилиндров. В результате истечения воды из цилиндра В возникает реактивная сила ![]() , действующая на этот цилиндр и приводящая в движение всю систему. Эта сила направлена вертикально вверх, а величина ее определяется относительной скоростью истечения воды
, действующая на этот цилиндр и приводящая в движение всю систему. Эта сила направлена вертикально вверх, а величина ее определяется относительной скоростью истечения воды ![]() и скоростью изменения массы воды в цилиндре:
и скоростью изменения массы воды в цилиндре:
![]()
В предложении, что блок невесом, нить нерастяжима и трение в системе отсутствует, уравнение движения цилиндра В может быть представлено в виде (рис. 1)
![]()
Здесь ![]() - мгновенное значение массы цилиндра с водой в любой момент времени, Т-упругая сила натяжения нити.
- мгновенное значение массы цилиндра с водой в любой момент времени, Т-упругая сила натяжения нити.
Уравнение движения цилиндра А (при тех же условиях) имеет вид
![]()
![]()
![]()
а расстояние ![]() , пройденное цилиндром В за время
, пройденное цилиндром В за время ![]() , может быть рассчитано по формуле
, может быть рассчитано по формуле
![]()
Где ![]() -масса цилиндра с водой при
-масса цилиндра с водой при ![]() .
.
ГЛАВА 2. АНИМАЦИОННО – ОБУЧАЮЩИЙ МЕТОД МЕХАНИЧЕСКОЙ СИСТЕМЫ
§ 2.1 анимаци я свойств механической системы
Эффект анимации – вывод изменяющегося, динамического изображения. Сам этот термин можно перевести как “одушевление” или “оживление” статичного (неподвижного) изображения. “Живые картинки” в компьютерной графике могут использоваться для развлечения, например в компьютерных играх. Современное кино уже трудно представить без использования спецэффектов, построенных с помощью анимации. У анимации есть и более серьезные приложения в научной и инженерной графике. При отображении результатов компьютерного моделирования в физике, химии, автомобиле – и авиастроении часто используются прямы анимации. Ведь включение в изобразительные средства “четвертого”, временного измерения, позволяет увеличить их информативность .
В англоязычной специальной литературе используют Computer-assisted animation и Computer- generated animation. В первом случае имеется в виду подход, когда человек традиционными средствами создает ключевые кадры анимации, а компьютер “дорисовывает” все промежуточные кадры. А во втором случае движущееся изображения создаст сам компьютер.
Иллюзию движущееся изображения создает просмотр последовательности неподвижных изображений(кадров), показывающих разные фазы движения. Смена этих изображений должна происходить достаточно быстро. Зрительное восприятие человека обладает некоторой инерцией, вследствие чего последовательность кадров и воспринимается как главное движение. Если скорость смены изображений чуть меньше времени реакции зрительных рецепторов, иллюзия движения сохраняется, но это движение кажется человеком прерывистым. Хорошей скоростью считается скорость показа 30 кадров в секунду.
Чтобы вывести на экран дисплея динамическое изображение, надо запрограммировать вывод последовательности кадров. Скорость смены кадров при этом должна быть достаточна большой. В этом, собственно, и заключается основная проблема при программировании динамических изображений. Если каждый кадр содержит сложное изображение, состоящее из большого числа графических элементов, да еще со своими атрибутами, такими как условие освещения, характер отражающей поверхности и т.д. ,решить эту проблему не просто. Простейший способ включения анимации и в программу - это обычная перерисовка графического экрана. Здесь мы имеем дело с простейшими изображениями, но даже в этом случае глаз замечает мерцание изображения и его “подергивание” при перерисовке.
Для ознакомления с базовыми приемами компьютерной анимации (или просто – чтобы было понятнее) приведем пример. Скажем, что имеется зеленый квадрат, который нужно переместить из левой части экрана в правую. И сделать это надо в течение 25 кадров. В случае первого «по кадрового» способа анимации нам придется нарисовать все двадцать пять кадров, и в каждом последующем кадре чуть-чуть сдвигать квадрат, чтобы он оказался справа на 25-м кадре. А если вдруг понадобится, чтобы он исчезал (увеличивался атрибут прозрачности) экспоненционально? Что, придется все это считать вручную и присваивать нужное значение прозрачности на каждом кадре?
Вовсе нет. Для этого существует второй способ анимации – с помощью промежуточных отображений. В этом случае только задается ключевые кадры, а промежуточные просчитывает автоматически.
Методы анимации.
Анимация – исскуственное представление движения в кино, на телевидении или в компьютерной графике, путем отображения последовательности рисунков или кадров с частотой, при которой обеспечивается целостное зрительное восприятие образов (как правила, для плавного воспроизведения анимации необходима скорость, или частота кадров, не менее 10 кадров в секунду – инертность зрительного восприятия).
Частоты смены кадров за секунду экранного времени составляет:
10..16-для компьютерной анимации.
24 - для кинематографа.
25 - для системы PAL или SECAM телевещания.
30- для системы NТSC телевещания.
Компьютерная анимация – это один из главных элементов мультимедия проектов и презентаций.
Разница между анимацией и видео состоит в том, что видео использует непрерывное движение и разбивает его на множество дискретных кадров.
Анимация использует множество независимых рисуноков или графических файлов, которые выводятся в определенной последовательности для создания иллюзии непрерывного движения. Для создания компьютерной анимации существует множество программных приложений.
Классическая анимация.
Эта метод представляющий собой поочередную смену рисунков, каждый из которых нарисован отдельно (принцип мультфильма). Этот метод очень трудоемкий из-за необходимости создания каждого рисунка.
Кукольная анимация.
В пространстве размещаются объекты – кадр фиксирует их положение, положение объектов меняется – опять фиксируется следующим кадром.
Спрайтовая анимация.
Это анимация, реализуемая при помощи языка программирования или специального инструментального средства. В спрайтовой анимации отсутствует понятие кадра (принцип подвижных игр). Почти всегда базируется на работе с «прозрачным» цветом.
Морфинг.
Преобразование одного графического образа в другой. Часто выполняется программно. Программное обеспечение морфинга генерирует заданное число промежуточных кадров, которое обеспечивает плавный переход начального образа в конечный.
Анимация цветом.
Положение объектов не изменяется, меняется лишь цвет. Часто выполяется программно.
Создается с помощью специальных программ (3D Studio MAX, PovRay, LightWave, Maya,…).
Картинка получается путем визуализации сцены.
Каждая сцена представляет собой следующее:
-набор объектов
-набор источников света
-набор текстур
-набор камер (хотя обычно одна)
Метод ключевых или опорных кадров.
Наиболее распространенным способом создания анимации является метод ключевых или опорных кадров. Ключевым событием может являться не только изменение параметров одного из возможных преобразований объекта (положения, поворота или масштаба), но также изменение любого из допускающих анимацию параметров (свойства источников света, материалов и др.). После определения всех ключевых кадров, система компьютерной анимации выполняет автоматический расчет событий анимации для всех остальных кадров, занимающих промежуточное положение между ключевыми – промежуточных кадров.
Процедурная анимация.
Для моделирования движений, или эффектов, которые трудно воспроизвести с помощью ключевых кадров, используется процедурная анимация. В процедурной анимации рассчитывают текущие значения параметров анимации, основываясь на начальных значениях, заданных пользователем, и на математических выражениях, описывающих изменение параметров во времени. Этот метод позволяет выполнять качественные анимации. Часто, процедурная анимация используется для разнообразных эффектов.
Прямая кинематика – перемещение объекта – родителя оказывает влияние на всю цепь объектов – потомков. Выглядит это так, будто опорные точки дочерних объектов связаны с опорными точками родительского объекта жесткими рычагами. Если перемещается родительский объект, дочерний объект также будет перемещаться, не изменяя своего положения относительно объекта – предка. Если перемещается родительский объект, дочерний объект также будет перемещаться, не изменяя своего положения относительно объекта – предка. Если родительский объект поворачивается, то дочерний перемещается и поворачивается, то дочерний перемещается и поворачивается таким образом, что его положение и ориентация по отношению к родительскому объекту остаются неизменными.
§2.1.1 обучающие программы
Современное время характеризуется возрастающими темпами научно-технического прогресса, непрерывным увеличением объема и изменением содержания знаний, умений и навыков, которыми должны владеть современные специалисты различных категорий, следствием чего является повышение требований к качеству их подготовки.
Одним из перспективных способов повышения эффективности процесса обучения является его автоматизация, т.е. использование в качестве средства обучения современной вычислительной техники. Эффективность использования компьютерной техники зависит от многих факторов. И первым из них следует назвать обучающую программу. Без всякого преувеличения можно утверждать, что она является сердцевиной обучающей системы.
Что представляет собой обучающая программ? Это программа, которая управляет учебной деятельностью учащегося и выполняет, как правило частично, функции учителя. В обучающей программе можно выделить следующие компоненты:
• учебные материалы (тексты, рисунки, схемы, задачи, вопросы и т. д.);
• специальную программу , определяющую, какую именно учебный материал и в какой последовательности представляется учащемуся.
Иногда в обучающей программе содержатся не тексты учебных задач (вопросов), а определенные правила, в соответствии с которыми система генерирует задачи (вопросы). С точки зрения дидактики систему компьютерного обучения можно представить как систему обучающих программ и способов их реализации (иногда вместо термина обучающая программа используют такие термины, как педагогический программный продукт, учебное обеспечение, пакет прикладных программ). Компьютер (техническое обеспечение) и программное обеспечение выступают как средство реализации обучающей программы, а их параметры реализуются с точки зрения возможностей и способов реализации обучающих программ. Это ни в коей мере не снижает роль компьютера и его программного обеспечения. Однако они должны оцениваться не сами по себе, а с точки зрения дидактических возможностей (и, естественно, ограничений), которые оказывают влияние на учебный процесс.
Основные проблемы связанные с компьютерным обучением
Обучающие программы реализуются с помощью компьютера и вполне естественно, что при их разработке ведущее место приобрели проблемы, связанные с машиной (программной) реализацией программ. Ведь не смотря на то, что возможности компьютера значительно возросли с каждым годом увеличиваются, реализация многих обучающих функций которые легко осуществляет даже неопытный педагог, связана с большими трудностями (например, распознавание ответа учащегося).Однако нельзя считать правильной весьма распространенную точку зрения, будто ключ к решению основных проблем компьютерного обучения – это разработка средств которые позволяют осуществлять переход от сценария обучающей программы к компьютерной программе. Такое представление в ряде случаев сказалось на разработке и оценке роли инструментария для программирования обучающих курсов (их называют обычно системными средствами автора). Многие разработчики таких систем (как правило, в целях рекламы) преувеличивают не только возможности созданных ими авторских систем, но и вообще их значение. Это обстоятельство, по мнению специалистов, играет отрицательную роль в исследуемых актуальных проблем разработки обучающих программ.
Преувеличение возможностей авторских средств часто сочетается с недооценкой важности тех психолого-педагогических проблем, которые возникают при разработки обучающих программ. Некоторые разработчики авторских средств полагают, будто учителя, а также специалисты в области информатики и вычислительной техники, имея смутные представление о психолого-педагогических особенностях обучения, а некоторые и о содержании того или иного учебного предмета, в состоянии создать эффективную обучающую программу.
Распространение подобных взглядов оказало влияние не только на теорию, но и на практику разработки обучающих программ. В ряде стран, например, в США и особенно в Великобритании, в течение последних 10-15 лет появилось не поддающееся учету количество микроскопических по своим размерам фирм (многие из них имеют штат из двух-трех программистов), которые разрабатывают обучающие программы, предназначенные для продажи. В нашей стране также нередко среди единоличных разработчиков обучающих программ были специалисты по вычислительной технике. Эта их деятельность, хотя и несколько отличалась от выполняемой ранее, тем не менее по своей сути оставалось привычной для них. В результате создавались многочисленные, но малоэффективные программы. Именно такая практика стала основным источником иллюзий, будто наибольшие трудности в разработке обучающих программ представляет кодирование или как часто говорились, программирование обучающих курсов.
Следует иметь в виду, что термин программирование трактуется по –разному: в более узком смысле – как составление программы для компьютера и как разработка программ в широком смысле слова. Когда мы говорим, что система образования и общество в целом программируют личность, то мы понимаем, что здесь речь идет о том, что общество в целом в частности через систему образования, оказывает большое влияние на становление человека как личности. Применительно к компьютерному обучению выражение “программирование обучающих курсов” стало восприниматься как синоним “разработки обучающих курсов”. А это привело к серьезным отрицательным последствиям:
· Отвлекло внимание от наиболее важных и трудоемких проблем-психолого-педагогических проблем разработки обучающих программ (обучающих курсов) – и тем самым, естественно, затормозило их исследование.
· Породило иллюзию, будто создав удобный инструментарий для кодирования обучающих программ, можно с помощью педагогов-энтузиастов решить проблему создания эффективных обучающих программ (обучающих курсов).
Разумеется, вину за это нельзя полностью возлагать на первых разработчиков обучающих программ и инструментария для кодирования (программирования) обучающих курсов. Просто они, не будучи педагогами, не усматривали тех психолого-педагогических проблем, которые возникают при разработке обучающих программ. Предполагалось, что, имея перед глазами внешне наблюдаемое поведение педагога, можно составить эффективную обучающую программу для компьютера.
Психолого-педагогический аспект компьютерного обучения
Недооценка психолого-педагогических проблем компьютеризации обучения, недостаточный учет психологических особенностей деятельности педагога и учащегося не могли не сказаться на качестве авторских систем, предназначенных для программирования (в узком смысле слова) обучающих курсов. Дидактические возможности их, как правило, были весьма ограничены. И дело не в том, что они налагали определенные ограничения на способ управления учебной деятельностью, на выбор учебных задач. Более существенно, что большинство авторских систем строилось на ошибочных представлениях о процессе обучения.
Поясним это более подробно, поскольку иногда полагают, что системы автора нейтральны по отношению к теоретическому представлению обучения и поэтому разрабатываемый инструментарий может быть использован для программирования обучающих систем, реализующих различные теоретические подходы. На самом деле это не так. Разработчики системы автора всегда исходят из некоторой модели обучения, из определенного представления о том, как именно следует управлять учебной деятельностью. Поскольку часто разработчики таких систем не имеют достаточной теоретической подготовки, они иногда чересчур смело полагаются на рекомендации отдельных психологов, не зная исходных теоретических предпосылок, основных принципов психологической теории, которых те придерживаются. Следовать таким рекомендациям особенно заманчиво, если их относительно легко реализовывать с помощью компьютера: это значительно упрощает разработку системы автора.
Данная точка зрения самым непосредственным образом сказалась на теории и практике разработки авторских систем. Многие из них содержат явный отпечаток бихевиористических теорий обучения, которые основное внимание удаляют правильному ответу, игнорируя мыслительную деятельность обучаемого. С точки зрения бихевиористов, основным в обучении является увеличение вероятности правильного ответа на некоторый стимул (например, предлагаемую учебную работу).
В настоящие время все большее число специалистов в области компьютерного обучения вынуждено признать, что основные проблемы при разработке обучающих программ – психолого-педагогические. По мнению многих специалистов, программирование обучающей программы – это лишь один этап ее разработки, который требует не более 10-20% времени и усилий. К тому же данный этап относится к наиболее изученным, его реализации при наличии опытных специалистов, как говорится, дело техники.
Следует иметь в виду, что применение компьютера оказывает исключительно большое влияние на все аспекты учебного процесса: и на содержание учебного материала, и на используемые учебные задачи, и на мотивацию учащихся и т.д. Все это обусловливает исключительно большое значение психолого-педагогических проблем для разработки эффективных обучающих программ.
Компьютеризация обучения отчетливо показала, что многие психологические и дидактические понятия и концепции работают”: основываясь на них, нельзя разработать эффективные обучающие программы. Проблема здесь не только в том, что многие из понятий еще не имеют однозначной трактовки. Ведь, в принципе, можно было бы договориться о том, какой именно трактовки следует придерживаться. Дело в том, что трактовка этих понятий не допускает их технологизации.
Некоторые особенности обучающих программ
Создание обучающих программ – творческий процесс, требующий не только логического мышления, но и интуиции. Этот процесс еще изучен недостаточно и не может быть описан с помощью жестких нормативов-предписаний. Много опасностей и ловушек подстерегает разработчиков обучающих программ. Для педагогов самая большая опасность – механический перенос особенностей обучения в классе (группе) на компьютерное обучение, стремление как можно более точно скопировать работу педагога. Хотелось бы отметить, что механический перенос в принципе недопустим по следующим причинам:
· Даже самый опытный педагог, мастер своего дела, далеко не всегда сможет описать свою деятельность и тем более объяснить каждое свое решение (многие решения принимаются педагогом интуитивно, они не полностью осознаются, и на вопрос, почему принято именно такое, а не иное решение в большинстве случаев отвечают: так подсказал опыт, это известно из практики и т.д.).
· Групповое, классное обучение, опыт которого приобретает педагог, не является адекватной моделью компьютерного обучения, которое обладает многими особенностями индивидуального обучения, существенно отличаются от группового.
· Компьютер не только накладывает определенные ограничения на реализацию учебного процесса, он раскрывает новые возможности в управлении учебной деятельностью. Это происходит прежде всего за счет неограниченных возможностей в предъявлении материала, применения разнообразных учебных задач, построения модели обучаемого путем накопления и переработки больших массивов данных, относящихся к учащемуся, неограниченного запаса знаний, относящихся к данной предметной области, и т.п.
Кроме того следует иметь в виду, сто разработка обучающих программ – это качественно иная, в сравнении с практической, деятельность педагога. Можно уметь решить задачу, но не уметь составить алгоритм. А ведь при разработке обучающей программы необходимо составить алгоритм работы компьютера, который отнюдь не копирует, а моделирует деятельность педагога и даже те же самые функции реализует иными способами. К тому же разработка обучающих программ требует более глубоких знаний не только в определенной предметной области, но и знаний об учебном процессе и учащихся. Мировой опыт убедительно показывает, что даже опытные практические работники, прошедшие специальную подготовку, нередко составляют весьма бледные обучающие программы, которые дают результаты значительно хуже, чем традиционное обучение.
Справедливости ради стоит отметить, что далеко не все обучающие программы, составленные специалистами в области обучения, оказались эффективными. Многие из них настолько скучные и неинтересные, что от них отказались как учителя, так и учащиеся.
Составление обучающих программ – это наука и искусство. Оно требует и глубоких знаний, и педагогического таланта.
Для программистов серьезную опасность представляет попытка механически перенести принципы разработки пакетов программ на создание педагогических программных продуктов (обучающих программ). Нельзя забывать, что эти программы управляют деятельностью живых людей, обладающих волей, мотивами, интересами, которые оказывают большое внимание на процесс обучения.
Чтобы обеспечить эффективное использование компьютера в учебном процессе, недостаточно заложить в компьютер систему указаний, даже правильных самих по себе. Необходимо спроектировать условия, в которых учащийся захочет следовать этим указаниям, а не поступать вопреки им. Только та обучающая программа сможет обеспечить эффективное обучение, разработчики которой учитывают в должной мере человеческий фактор, видят в учащихся субъектов учебной деятельности, а не придаток к компьютеру, слепо повинующийся его указаниям.
Основные типы программ применяемых в образовании.
Многообразие применений компьютеров делает возможным и даже необходимым систематизацию форм использования и типов программ. Принцип независимости может оказаться подходящим критерием для классификации, отвечающей педагогическим соображениям. Независимость в этом смысле предполагает способность учащихся принимать участие в определение целей и содержания своей деятельности, влиять на процесс обучения и управлять применяемыми средствами.
Упрощенная классификация программ может быть составлена по восходящей: от тех, которые структурируют работу и учение, до тех, которые позволяют делать это самим учащимся.
Управляющие программы, выполняющие некоторые традиционные функции учителя, в частности управления классом. Они содержать команды, не только касающиеся работы на компьютере, но и, например, дающие учащимся указание покинуть рабочее место, с тем чтобы что-то проверить, получить дополнительные данные, обсудить ход работы с соучениками и т.д.
Обучающие программы, направляющие обучение исходя из имеющихся у учащегося знаний и его индивидуальных предпочтений; как правило, они предполагают усвоение новой информации.
§ 2.1.2 описание установки
ПРИБОРЫ и ПРИНАДЛЕЖНОСТИ:
Экспериментальная установка (рис. 2), состоящаяся из двух цилиндров 7, связанных нитью, перекинутой через блок 1, системы подвода воды 5, 6 и отчетных устройств 2, 3, смонтирована в виде стенда на стене.
Наполнение обоих цилиндров водой производится одновременно с помощью трубы 5 с распределительными отводами 6. Труба 5 выполнена подвижной, с тем чтобы после наполнения цилиндров иметь возможность приостановить подачу воды одновременно в оба цилиндра, для чего труба отводится влево. Для отсчета уровня воды в цилиндрах на них нанесены шкалы 9. Система приходит в движение только после того, как ограничительная пластина 10 опустится . в горизонтальном положении она удерживается замком 4 и фиксирует стопорные диски 11 и 12.
Величина пройденного пути определяется расстоянием, проходимым диском 12 до упорного кольца 2, и измеряется по шкале 3, нуль которой совмещен с начальным положением диска 12.
Вода, вытекающая из цилиндров, попадает в сосуд 8, имеющий сток.
![]()
Задание 1. Определение расхода массы цилиндров
При выполнении этого задания цилиндры находятся в неподвижном состоянии.
1. Наполнить цилиндры водой.
2. Прекратить доступ воды в цилиндры, передвинув трубу 5 в крайнее левое положение.
3. Провести измерения уровня воды в левом цилиндре через каждые 2 с. секундомер включается в тот момент, когда уровень проходит нулевое деление шкалы 9, нанесенной на цилиндр.
4. Проделать измерения п. 3 для правого цилиндра. Указанные измерения для каждого из цилиндров провести не менее трех раз. Результаты измерений занести в таблицу. Рассчитать расход воды, принимая ее плотность равной p=1г/см3
(площадь сечения цилиндров рассчитывается по известному внутреннему диаметру). На основании полученных результатов построить график зависимости ![]() расхода воды от времени. При малых значениях времени истечения эта зависимость должна представлять прямую линию, тангенс угла наклона которой к оси времени с учетом масштаба дает величину
расхода воды от времени. При малых значениях времени истечения эта зависимость должна представлять прямую линию, тангенс угла наклона которой к оси времени с учетом масштаба дает величину ![]() .
.
5. Используя график ![]() , рассчитать секундный расход воды в обоих цилиндрах.
, рассчитать секундный расход воды в обоих цилиндрах.
Убедиться, что скорость истечения жидкости для обоих цилиндров примерно одинакова.
Задание 2. Экспериментальное определение ускорения системы
1. Наполнить цилиндры водой.
2. Прекратить подачу воды в цилиндры, передвинув трубу 5 в крайнее левое положение.
3. В тот момент, когда опускающееся уровни воды в цилиндрах проходят нулевую отметку шкал 9, открыв замок 4, опустить упорную пластину 10 и включить секундомер.
4. В момент удара шайбы 12 об упорное кольцо 2 остановить секундомер.
5. Для данного расстояния ![]() , проходимого цилиндрами, произвести не менее трех измерений времени (повторить п. 1-4).
, проходимого цилиндрами, произвести не менее трех измерений времени (повторить п. 1-4).
6. Меняя положение упорного кольца 2, т. е. меняя расстояния, проходимые системой, произвести измерения времени движения для 4-5 расстояний (повторить п. 1-5).
Результаты измерений занести в таблицу.
7. На основании полученных результатов построить график ![]() . Из данного графика определить ускорение цилиндров.
. Из данного графика определить ускорение цилиндров.
Задание 3. Определение относительной скорости истечения воды
1.Скорость истечения воды из цилиндров рассчитать в соответствии с формулой ![]() , где
, где ![]() -средняя арифметическая высота уровня воды за время движения,
-средняя арифметическая высота уровня воды за время движения, ![]() - безразмерный коэффициент скорости, равный для данной установки 0,97. Среднюю высоту уровня жидкости найти с помощью графика, полученного в задании 1. По этому графику определить высоту
- безразмерный коэффициент скорости, равный для данной установки 0,97. Среднюю высоту уровня жидкости найти с помощью графика, полученного в задании 1. По этому графику определить высоту ![]() столба жидкости , вытекающей за время движения. Высоту
столба жидкости , вытекающей за время движения. Высоту ![]() рассчитать как разность между высотой
рассчитать как разность между высотой ![]() столба воды в начальный момент
столба воды в начальный момент ![]() и половинной высотой столба вытекшей воды
и половинной высотой столба вытекшей воды ![]() . Высота столба воды в начальный момент известна.
. Высота столба воды в начальный момент известна. ![]()
Задание 4. Определение теоретического значения ускорения движения по результатам
измерения и u
1. По значениям секундного расхода воды ![]() и скорости истечения
и скорости истечения ![]() , полученным в заданиях 1 и 3, рассчитать ускорение движения системы по формуле
, полученным в заданиях 1 и 3, рассчитать ускорение движения системы по формуле ![]()
2. Сопоставить теоретическое значение ускорения с его значением, полученным экспериментально в задании 2.
§ 2.1.3 алгоритмизация анимационо – обучающей механической системы
![]()
![]()
![]()
![]()
![]()
§ 2.2 Инструкция пользования анимационно-обучающей программы ”Water Program”
Для пользования анимационно-обучающей программы “Water Program” необходимо выполнить следующие:
1. Дискету на которой записан диалоговой – обучающие программа “Water Program” расположим в дисковод;
2. С помощью мышки находим нужную название файла;
3. Вызовем на ОЗУ компьютера выбранный файлы на экране появится MENU в виде:
![]()
4. С помощью мышки курсор устанавливается на текст “Teorya” и нажмём клавишу Enter. На экране появится описание установки, т. е. порядка выполнения лабораторной работы.
5. После рассмотрение и изучения текста нажмём клавишу Enter и на экране появится Menu.
6.
Далее с помощью мышки курсор устанавливаем на отметку “Resunok Pribora” и на экране появится рисунок установки для определения движения тела с переменной массой.
7. После ознакомления с порядком выполнения работ нажимаем
![]()
клавишу Enter и возвращаемся в Menu.
8. С помощью мышки курсор устанавливаем на отметку “Animatsiya Pribora” и нажмем клавишу “Enter” на экране появится слово “Vvdite Massu Tela Tselindra S Vodoy (v grammah)- ”.
9. Введем массу.
10. После нажатия клавиши Enter появится рисунок прибора.
11. Когда нажмем на Enter происходит анимация в установке.
12. Нажатием клавишу Enter возвращаемся в Menu.
13. Для выхода из диалогово – обучающей программы “Water Program” следует курсор установит на отметку “Exit” и нажат клавишу Enter.
14. Для повторения работы необходимо выполнить последовательно пункты с 4-го по 13-й.
§2.3 Текст анимационно-обучающей программы механической системы
Program Water_Program;
Uses Crt, Graph;
Const
{ Vvod Unit Graphics }
FunWeb=c:\tp\Bgi;
Var
Gd,Gm,I,X,Y,X1,Y1,XX,YY,Rad,J:Integer;
Z,J1,J2,W,V,G:Integer;
F:Real;
N,M,M1:Word;
KEY:CHAR;
INFINITE,K,X2,Y2: Integer;
Color1,Color2,Color3,Color4:Word;
A,U:Integer;
B,C,D,E,H,Q,WWW,FF:INTEGER;
S,T,Alfa,Ao,Mo,St:Integer;
procedure click;
const f:array[1..12] of real=(130.8,130.6,146.8,155.6,164.8,174.6,185.0,196.0,207.7,220,233.1,246.9);
var k,n:integer;
begin
for k:=0 to 3 do
for n:=1 to 12 do
begin
sound(round(f[n]*(1 shl k)));
delay(5000);
nosound;
end;
for k:=3 downto 0 do
for n:=12 downto 1 do
begin
sound(round(f[n]*(1 shl k)));
delay(5000);
nosound;
end;
end;
Procedure Suret;
Procedure Vvedenia;
Begin
{ClearDevice;}
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);
For I:=1 To 250 Do
Begin
Sound(2000-(i*5));
SetFillStyle(1,Yellow);
Bar(380,20+i,600,52+i);
End;
SetFillStyle(1,Black);
Bar(382,22,598,300);
NoSound;
For I:=1 To 10 Do
Begin
Delay(1000);
End;
Begin
Delay(60000);
Sound(1000);
SetColor(10);
Delay(1000);
SetTextStyle(0,0,0);
OutTextXY(390,35,1 - );
SetColor(Red);
OutTextXY(420,35,Block);
Sound(920);
SetColor(10);
Delay(1000);
OutTextXY(390,50,2 - );
SetColor(Red);
OutTextXY(420,50,Otchetnayia Ustanovka);
Sound(840);
SetColor(10);
Delay(1000);
OutTextXY(390,65,3 - );
SetColor(Red);
OutTextXY(420,65,Izmeritel Pokazanyia);
Sound(760);
SetColor(10);
Delay(1000);
OutTextXY(390,80,4 - );
SetColor(Red);
OutTextXY(420,80,Udergivayushaya zamok);
{ Sound(680); }
SetColor(10);
Delay(1000);
OutTextXY(390,95,5 - );
SetColor(Red);
OutTextXY(420,95,Vodaprovod);
Sound(600);
SetColor(10);
Delay(1000);
OutTextXY(390,110,6 - );
SetColor(Red);
OutTextXY(420,110,Vodaprovodki);
Sound(520);
Delay(1000);
SetColor(10);
OutTextXY(390,125,7 - );
SetColor(Red);
OutTextXY(420,125,Tsilindri);
Sound(440);
Delay(1000);
SetColor(10);
OutTextXY(390,140,8 - );
SetColor(Red);
OutTextXY(420,140,Rezervuar);
{ Sound(360);}
Delay(1000);
SetColor(10);
OutTextXY(390,155,9 - );
SetColor(Red);
OutTextXY(420,155,Shkala);
{ Sound(280);
Delay(100); }
SetColor(10);
OutTextXY(390,170,10- );
SetColor(Red);
OutTextXY(420,170,Plastina);
{ Sound(200);
Delay(100);}
SetColor(10);
OutTextXY(390,185,11- );
SetColor(Red);
OutTextXY(420,185,Stopornyia Diska - 1);
{ Sound(120);
Delay(1000);}
SetColor(10);
OutTextXY(390,200,12- );
SetColor(Red);
OutTextXY(420,200,Stopornyia Diska - 2);
Delay(5000);
Nosound;
End;
{ReadLn;}
End;
Begin
{ClearDevice;}
vvedenia;
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);
vvedenia;
{************************** Go To The Program **************************}
{- 1 -}
A:=St;
SetColor(Yellow); SetFillStyle(1,Red);
FillEllipse(120,45,25,25);
SetColor(Yellow); SetFillStyle(1,Blue);
FillEllipse(120,45,2,2);
SetColor(Black);
Line(80,45,98,45); Line(102,45,120,45);
Line(120,45,138,45); Line(142,45,160,45);
Line(120,5,120,23); Line(120,27,120,45);
Line(120,45,120,63); Line(120,67,120,85);
SetColor(Yellow);
Line(120,45,112,53);
Line(120,45,128,53);
Line(112,53,128,53);
SetColor(Black);
Line(112,54,110,57); Line(116,54,114,57);
Line(120,54,118,57); Line(124,54,122,57);
Line(128,54,126,57);
{- 10 -}
SetFillStyle(1,8);
SetColor(Yellow);
Bar(60,185,175,220);
Rectangle(60,185,175,220);
For I:=1 To 15 Do
Begin
SetColor(Blue);
Line(59+i,185,59,220);
Line(191-i,184,176-i,220);
End;
SetColor(Yellow);
Line(75,185,59,220);
Line(175,185,160,220);
SetColor(Black);
Line(85,178,92,178); Line(85,178,85,185);
Line(92,178,92,185); Line(85,185,92,185);
Line(85,185,82,190); Line(92,185,89,190);
Line(82,190,89,190);
Line(155,178,162,178); Line(155,178,155,185);
Line(162,178,162,185); Line(155,185,162,185);
Line(155,185,152,190); Line(162,185,159,190);
Line(152,190,159,190);
{- 4 -}
SetColor(Yellow);
SetFillStyle(1,8);
FillEllipse(173,197,3,10);
For I:=1 To 8 Do
Begin
SetColor(8);
FillEllipse(175-i,202+(i*2),2,2);
End;
SetColor(Yellow);
Line(171,204,166,219);
Line(176,203,169,219);
Ellipse(167,219,180,360,2,2);
SetColor(Yellow);
SetFillStyle(1,4);
FillEllipse(173,196,1,3);
{- 3 -}
SetColor(Red); SetFillStyle(7,Yellow);
Bar(127,79,137,189);
Rectangle(127,79,137,189);
SetColor(Red); SetFillStyle(1,Black);
Bar(132,81,135,187);
SetColor(Black);
SetTextStyle(2,0,1);
OutTextXY(121,82,0);
OutTextXY(121,88,1);
OutTextXY(121,94,2);
OutTextXY(121,102,3);
OutTextXY(121,110,4);
OutTextXY(121,116,5);
OutTextXY(121,122,6);
OutTextXY(121,130,7);
OutTextXY(121,138,8);
OutTextXY(121,146,9);
OutTextXY(118,154,10);
OutTextXY(118,162,11);
OutTextXY(118,170,11);
OutTextXY(118,178,11);
{- 11 -}
{- 12 -}
SetFillStyle(1,0);
SetColor(Yellow);
FillEllipse(95,215,8,5);
FillEllipse(145,215,8,5);
{- 5 -}
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(70,230,166,240);
SetFillStyle(1,Red);
Bar(71,231,165,239);
SetFillStyle(1,0);
FillEllipse(166,235,3,5);
For I:=1 To 5 Do
Begin
SetColor(Blue);
Ellipse(70+i,235,90,270,3,5);
End;
SetColor(Yellow);
Ellipse(76,235,90,270,3,5);
Bar(72,233,35,237);
Rectangle(72,233,35,237);
{- 6 -}
SetColor(Yellow);
SetFillStyle(1,Black);
Bar(97,235,100,253);
Bar(147,235,150,253);
Rectangle(97,235,100,253);
Rectangle(147,235,150,253);
{- 8 -}
SetColor(Yellow);
SetFillStyle(1,2);
Bar(45,330,190,400);
For I:=1 To 20 Do
Begin
SetColor(Blue);
Line(44+i,330,44,365);
Line(211-i,365,191-i,400);
End;
SetColor(Yellow);
Line(64,330,190,330); Line(64,330,44,365);
Line(44,365,170,365); Line(170,365,190,330);
Line(190,330,190,365); Line(190,365,170,400);
Line(170,365,170,400); Line(170,400,44,400);
Line(44,400,44,365); Line(64,330,64,365);
{- 7 -}
{- 7.1 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(88,265,102,310);
FillEllipse(95,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310,8,3);
SetColor(Yellow);
Rectangle(93,311,97,350);
SetFillStyle(1,Blue);
FillEllipse(95,310,3,2);
SetColor(Blue);
Line(93,350,97,350);
SetColor(Yellow);
Ellipse(95,350,180,360,2,1);
{- 7.2 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(138,265,152,310);
FillEllipse(145,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(145,310,8,3);
SetColor(Yellow);
Rectangle(143,311,147,350);
SetFillStyle(1,Blue);
FillEllipse(145,310,3,2);
SetColor(Blue);
Line(143,350,147,350);
SetColor(Yellow);
Ellipse(145,350,180,360,2,1);
{- 2 -}
SetColor(Yellow);
Line(95,47,95,215);
Line(145,47,145,215);
Line(95,220,95,263);
Line(145,220,145,263);
Line(95,257,89,263);
Line(95,257,101,263);
Line(145,257,139,263);
Line(145,257,151,263);
SetFillStyle(1,Black);
Bar(138,130,148,132);
Rectangle(138,130,148,132);
{- Line -}
SetColor(11);
Line(140,40,200,25);
Line(150,130,200,120);
Line(134,183,200,170);
Line(160,238,200,230);
Line(150,250,200,260);
Line(150,280,200,290);
Line(170,345,210,355);
Line(200,205,148,217);
Line(98,217,200,192);
Line(175,190,210,180);
Line(160,208,210,195);
SetColor(Yellow);
SetTextStyle(2,0,4);
OutTextXY(204,21,1);
OutTextXY(204,116,2);
OutTextXY(204,166,3 - 9);
OutTextXY(213,176,4);
OutTextXY(204,226,5);
OutTextXY(204,256,6);
OutTextXY(204,286,7);
OutTextXY(214,351,8);
OutTextXY(213,190,10);
OutTextXY(202,184,11);
OutTextXY(202,200,12);
ReadLn;
End;
{--------------------------------------------------------------}
Procedure Vvedenia;
Begin
ClearDevice;
{ SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);}
For I:=1 To 250 Do
Begin
Sound(2000-(i*5));
SetFillStyle(1,Yellow);
{ Bar(80,20+i,60,52+i);}
End;
SetFillStyle(1,Black);
{ Bar(382,22,558,300);}
NoSound;
For I:=1 To 10 Do
Begin
Delay(1000);
End;
Begin
Delay(60000);
Sound(1000);
SetColor(10);
Delay(1000);
SetTextStyle(0,0,0);
{ OutTextXY(40,35,1 - );
} SetColor(Red);
OutTextXY(200,35,ОПИСАНИЕ УСТАНОВКИ);
Sound(920);
SetColor(10);
Delay(1000);
{ OutTextXY(39,50,2 - );}
SetColor(Red);
OutTextXY(200,50,ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ:);
OutTextXY(200,65,Измерительная установка, секундомер.);
Sound(840);
SetColor(10);
Delay(1000);
{ OutTextXY(39,65,3 - );}
SetColor(Red);
OutTextXY(30,75,Экспериментальная установка, состоящая из двух цилиндров 7, связанных );
OutTextXY(30,85,нитью, перекинутой через блок 1, системы подвода воды 5,6 и отсеченных );
OutTextXY(30,95,устройств 2,3 смонтирована в виде стенда на стене.);
OutTextXY(30,105,Наполнение обоих цилиндров водой производится одновременно с помощью );
OutTextXY(30,115,трубы 5 c распределительными отводами 6. Труба 5 выполнена подвижной,);
OutTextXY(30,125,с тем чтобы после наполнения цилиндров иметь возможность приостоновить );
OutTextXY(30,135,подачу воды одновременно в оба цилиндра, для чего труба отводится влево.);
OutTextXY(30,145,Для отсчета уровня воды в цилиндрах на них нанесены шкалы 9. );
OutTextXY(30,155,Система приходит в движение только после того, как ограничительная пластина);
OutTextXY(30,165,10 опустится. В горизонтальном положении она удерживается замком 4);
OutTextXY(30,175,и фиксирует стопорные диски 11 и 12. Величина пройденного пути определяется );
OutTextXY(30,185,расстоянием,проходимым диском 12 до упорного кольца 2,и измеряется по);
OutTextXY(30,195,шкале 3, нуль которой совмещен с начальным положением диска 12.);
OutTextXY(30,205,Вода, вытекающая из цилиндров, попадает в сосуд 8, имеющий сток.);
OutTextXY(40,215,);
Nosound;
End;
repeat until keypressed;
end;
Procedure Vvedenia1;
Begin
ClearDevice;
{ SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);}
For I:=1 To 250 Do
Begin
Sound(2000-(i*5));
SetFillStyle(1,Yellow);
{ Bar(80,20+i,60,52+i);}
End;
SetFillStyle(1,Black);
{ Bar(382,22,558,300);}
NoSound;
For I:=1 To 10 Do
Begin
Delay(1000);
End;
Begin
Delay(60000);
Sound(1000);
SetColor(10);
Delay(1000);
SetTextStyle(0,0,0);
{ OutTextXY(40,35,1 - );
} SetColor(Red);
OutTextXY(42,210,Block);
Sound(920);
SetColor(10);
Delay(1000);
{ OutTextXY(39,50,2 - );}
SetColor(Red);
OutTextXY(42,220,Otchetnayia Ustanovka);
Sound(840);
SetColor(10);
Delay(1000);
{ OutTextXY(39,65,3 - );}
SetColor(Red);
OutTextXY(42,230,Izmeritel Pokazanyia);
Sound(760);
SetColor(10);
Delay(1000);
{ OutTextXY(39,80,4 - );
} SetColor(Red);
OutTextXY(42,240,Udergivayushaya zamok);
Sound(680);
SetColor(10);
Delay(1000);
{ OutTextXY(39,95,5 - );}
SetColor(Red);
OutTextXY(42,250,Vodaprovod);
Sound(600);
SetColor(10);
Delay(1000);
{ OutTextXY(39,110,6 - ); }
SetColor(Red);
OutTextXY(42,260,Vodaprovodki);
Sound(520);
Delay(1000);
SetColor(10);
{ OutTextXY(39,125,7 - );}
SetColor(Red);
OutTextXY(42,270,Tsilindri);
Sound(440);
Delay(1000);
SetColor(10);
{ OutTextXY(39,140,8 - ); }
SetColor(Red);
OutTextXY(42,280,Rezervuar);
Sound(360);
Delay(1000);
SetColor(10);
{ OutTextXY(39,155,9 - );}
SetColor(Red);
OutTextXY(42,290,Shkala);
Sound(280);
Delay(1000);
SetColor(10);
{ OutTextXY(39,170,10- ); }
SetColor(Red);
OutTextXY(42,300,Plastina);
Sound(200);
Delay(1000);
SetColor(10);
{ OutTextXY(39,185,11- );}
SetColor(Red);
OutTextXY(42,310,Stopornyia Diska - 1);
Sound(120);
Delay(1000);
SetColor(10);
{ OutTextXY(39,200,12- ); }
SetColor(Red);
OutTextXY(42,320,Stopornyia Diska - 2);
Delay(5000);
Nosound;
End;
repeat until keypressed;
ReadLn;
End;
Procedure Anim1;
Begin
ClearDevice;
{---------------------------------------------------------}
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
Bar(500,10,600,20);
SetFillStyle(1,Blue);
Bar(2,2,636,477);
SetTextStyle(1,0,1);
SetFillStyle(1,Yellow);
Bar(500,12,620,35);
SetFillStyle(1,Black);
Bar(501,13,619,34);
OutTextXY(10,10,Vvdite Massu Tela Tselindra S Vodoy (v grammah) - );
WriteLn(Vvdite Massu Tela Tselindra S Vodoy (v grammah) - );
begin
GotoXY(65,2);
ReadLn(WWW);
end;
If WWW100 Then
Begin
WriteLn(Vvdennaya Massa Ne Realen - );
WriteLn(Vvdite Massu Tela Tselindra S Vodoy (v grammah) - );
ReadLn(WWW);
End;
If WWW100 Then Gd:=10;
W:=WWW Div 4;
Gm:=0;
Ao:=0;
Alfa:=1;
Mo:=1;
T:=WWW;
Gd := 0;
{--------------- Formula -----------------}
{-} {-}
{-} St:=(Alfa*Ao) div (4*Mo)*Sqr(t); {-}
{-} {-} {-}
{-----------------------------------------}
InitGraph(Gd, Gm, FunWeb);
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);
{************************** Go To The Program **************************}
{- 1 -}
A:=St;
SetColor(Yellow); SetFillStyle(1,Red);
FillEllipse(120,45,25,25);
SetColor(Yellow); SetFillStyle(1,Blue);
FillEllipse(120,45,2,2);
SetColor(Black);
Line(80,45,98,45); Line(102,45,120,45);
Line(120,45,138,45); Line(142,45,160,45);
Line(120,5,120,23); Line(120,27,120,45);
Line(120,45,120,63); Line(120,67,120,85);
SetColor(Yellow);
Line(120,45,112,53);
Line(120,45,128,53);
Line(112,53,128,53);
SetColor(Black);
Line(112,54,110,57); Line(116,54,114,57);
Line(120,54,118,57); Line(124,54,122,57);
Line(128,54,126,57);
{- 10 -}
SetFillStyle(1,8);
SetColor(Yellow);
Bar(60,185,175,220);
Rectangle(60,185,175,220);
For I:=1 To 15 Do
Begin
SetColor(Blue);
Line(59+i,185,59,220);
Line(191-i,184,176-i,220);
End;
SetColor(Yellow);
Line(75,185,59,220);
Line(175,185,160,220);
SetColor(Black);
Line(85,178,92,178); Line(85,178,85,185);
Line(92,178,92,185); Line(85,185,92,185);
Line(85,185,82,190); Line(92,185,89,190);
Line(82,190,89,190);
Line(155,178,162,178); Line(155,178,155,185);
Line(162,178,162,185); Line(155,185,162,185);
Line(155,185,152,190); Line(162,185,159,190);
Line(152,190,159,190);
{- 4 -}
SetColor(Yellow);
SetFillStyle(1,8);
FillEllipse(173,197,3,10);
For I:=1 To 8 Do
Begin
SetColor(8);
FillEllipse(175-i,202+(i*2),2,2);
End;
SetColor(Yellow);
Line(171,204,166,219);
Line(176,203,169,219);
Ellipse(167,219,180,360,2,2);
SetColor(Yellow);
SetFillStyle(1,4);
FillEllipse(173,196,1,3);
{- 3 -}
SetColor(Red); SetFillStyle(7,Yellow);
Bar(127,79,137,189);
Rectangle(127,79,137,189);
SetColor(Red); SetFillStyle(1,Black);
Bar(132,81,135,187);
SetColor(Black);
SetTextStyle(2,0,1);
OutTextXY(121,82,0);
OutTextXY(121,88,1);
OutTextXY(121,94,2);
OutTextXY(121,102,3);
OutTextXY(121,110,4);
OutTextXY(121,116,5);
OutTextXY(121,122,6);
OutTextXY(121,130,7);
OutTextXY(121,138,8);
OutTextXY(121,146,9);
OutTextXY(118,154,10);
OutTextXY(118,162,11);
OutTextXY(118,170,11);
OutTextXY(118,178,11);
{- 11 -}
{- 12 -}
SetFillStyle(1,0);
SetColor(Yellow);
FillEllipse(95,215,8,5);
FillEllipse(145,215,8,5);
{- 5 -}
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(70,230,166,240);
SetFillStyle(1,Red);
Bar(71,231,165,239);
SetFillStyle(1,0);
FillEllipse(166,235,3,5);
For I:=1 To 5 Do
Begin
SetColor(Blue);
Ellipse(70+i,235,90,270,3,5);
End;
SetColor(Yellow);
Ellipse(76,235,90,270,3,5);
Bar(72,233,35,237);
Rectangle(72,233,35,237);
{- 6 -}
SetColor(Yellow);
SetFillStyle(1,Black);
Bar(97,235,100,253);
Bar(147,235,150,253);
Rectangle(97,235,100,253);
Rectangle(147,235,150,253);
{- 8 -}
SetColor(Yellow);
SetFillStyle(1,2);
Bar(45,330,190,400);
For I:=1 To 20 Do
Begin
SetColor(Blue);
Line(44+i,330,44,365);
Line(211-i,365,191-i,400);
End;
SetColor(Yellow);
Line(64,330,190,330); Line(64,330,44,365);
Line(44,365,170,365); Line(170,365,190,330);
Line(190,330,190,365); Line(190,365,170,400);
Line(170,365,170,400); Line(170,400,44,400);
Line(44,400,44,365); Line(64,330,64,365);
{- 7 -}
{- 7.1 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(88,265,102,310);
FillEllipse(95,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310,8,3);
SetColor(Yellow);
Rectangle(93,311,97,350);
SetFillStyle(1,Blue);
FillEllipse(95,310,3,2);
SetColor(Blue);
Line(93,350,97,350);
SetColor(Yellow);
Ellipse(95,350,180,360,2,1);
{- 7.2 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(138,265,152,310);
FillEllipse(145,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(145,310,8,3);
SetColor(Yellow);
Rectangle(143,311,147,350);
SetFillStyle(1,Blue);
FillEllipse(145,310,3,2);
SetColor(Blue);
Line(143,350,147,350);
SetColor(Yellow);
Ellipse(145,350,180,360,2,1);
{- 2 -}
SetColor(Yellow);
Line(95,47,95,215);
Line(145,47,145,215);
Line(95,220,95,263);
Line(145,220,145,263);
Line(95,257,89,263);
Line(95,257,101,263);
Line(145,257,139,263);
Line(145,257,151,263);
SetFillStyle(1,Black);
Bar(138,130,148,132);
Rectangle(138,130,148,132);
{- Line -}
SetColor(11);
Line(140,40,200,25);
Line(150,130,200,120);
Line(134,183,200,170);
Line(160,238,200,230);
Line(150,250,200,260);
Line(150,280,200,290);
Line(170,345,210,355);
Line(200,205,148,217);
Line(98,217,200,192);
Line(175,190,210,180);
Line(160,208,210,195);
SetColor(Yellow);
SetTextStyle(2,0,4);
OutTextXY(204,21,1);
OutTextXY(204,116,2);
OutTextXY(204,166,3 - 9);
OutTextXY(213,176,4);
OutTextXY(204,226,5);
OutTextXY(204,256,6);
OutTextXY(204,286,7);
OutTextXY(214,351,8);
OutTextXY(213,190,10);
OutTextXY(202,184,11);
OutTextXY(202,200,12);
{- Animation -}
SetColor(10);
SetTextStyle(5,0,1);
OutTextXY(230,20,Dlya Zapuska Programmy Nagmite);
SetColor(10);
SetTextStyle(7,0,1);
OutTextXY(520,25,ENTER);
Repeat;
Delay(50000);
SetColor(Yellow);
SetTextStyle(7,0,1);
OutTextXY(520,25,ENTER);
Sound(1200);
Delay(50000);
SetColor(Red);
SetTextStyle(7,0,1);
OutTextXY(520,25,ENTER);
NoSound;
Until Keypressed;
SetColor(Blue);
SetTextStyle(5,0,1);
OutTextXY(230,20,Dlya Zapuska Programmy Nagmite);
SetColor(Blue);
SetTextStyle(7,0,1);
OutTextXY(520,25,ENTER);
{- 7 -}
ReadLn;
Sound(100);
Delay(10000);
NoSound;
SetTextStyle(2,0,2);
SetColor(Yellow);
OutTextXY(121,130,7);
If W0 Then
Begin
SetFillStyle(1,Blue);
Bar(2,2,636,477);
SetColor(Yellow); SetFillStyle(1,Red);
FillEllipse(120,45,25,25);
SetColor(Yellow); SetFillStyle(1,Blue);
FillEllipse(120,45,2,2);
SetColor(Black);
Line(80,45,98,45); Line(102,45,120,45);
Line(120,45,138,45); Line(142,45,160,45);
Line(120,5,120,23); Line(120,27,120,45);
Line(120,45,120,63); Line(120,67,120,85);
SetColor(Yellow);
Line(120,45,112,53);
Line(120,45,128,53);
Line(112,53,128,53);
SetColor(Black);
Line(112,54,110,57); Line(116,54,114,57);
Line(120,54,118,57); Line(124,54,122,57);
Line(128,54,126,57);
{- 10 -}
SetFillStyle(1,8);
SetColor(Yellow);
Bar(60,185,175,220);
Rectangle(60,185,175,220);
For I:=1 To 15 Do
Begin
SetColor(Blue);
Line(59+i,185,59,220);
Line(191-i,184,176-i,220);
End;
SetColor(Yellow);
Line(75,185,59,220);
Line(175,185,160,220);
SetColor(Black);
Line(85,178,92,178); Line(85,178,85,185);
Line(92,178,92,185); Line(85,185,92,185);
Line(85,185,82,190); Line(92,185,89,190);
Line(82,190,89,190);
Line(155,178,162,178); Line(155,178,155,185);
Line(162,178,162,185); Line(155,185,162,185);
Line(155,185,152,190); Line(162,185,159,190);
Line(152,190,159,190);
{- 4 -}
SetColor(Yellow);
SetFillStyle(1,8);
FillEllipse(173,197,3,10);
For I:=1 To 8 Do
Begin
SetColor(8);
FillEllipse(175-i,202+(i*2),2,2);
End;
SetColor(Yellow);
Line(171,204,166,219);
Line(176,203,169,219);
Ellipse(167,219,180,360,2,2);
SetColor(Yellow);
SetFillStyle(1,4);
FillEllipse(173,196,1,3);
{- 3 -}
SetColor(Red); SetFillStyle(7,Yellow);
Bar(127,79,137,189);
Rectangle(127,79,137,189);
SetColor(Red); SetFillStyle(1,Black);
Bar(132,81,135,187);
SetColor(Black);
SetTextStyle(2,0,1);
OutTextXY(121,82,0);
OutTextXY(121,88,1);
OutTextXY(121,94,2);
OutTextXY(121,102,3);
OutTextXY(121,110,4);
OutTextXY(121,116,5);
OutTextXY(121,122,6);
OutTextXY(121,130,7);
OutTextXY(121,138,8);
OutTextXY(121,146,9);
OutTextXY(118,154,10);
OutTextXY(118,162,11);
OutTextXY(118,170,11);
OutTextXY(118,178,11);
{- 11 -}
{- 12 -}
SetFillStyle(1,0);
SetColor(Yellow);
FillEllipse(95,215,8,5);
FillEllipse(145,215,8,5);
{- 5 -}
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(70,230,166,240);
SetFillStyle(1,Red);
Bar(71,231,165,239);
SetFillStyle(1,0);
FillEllipse(166,235,3,5);
For I:=1 To 5 Do
Begin
SetColor(Blue);
Ellipse(70+i,235,90,270,3,5);
End;
SetColor(Yellow);
Ellipse(76,235,90,270,3,5);
Bar(72,233,35,237);
Rectangle(72,233,35,237);
{- 6 -}
SetColor(Yellow);
SetFillStyle(1,Black);
Bar(97,235,100,253);
Bar(147,235,150,253);
Rectangle(97,235,100,253);
Rectangle(147,235,150,253);
{- 8 -}
SetColor(Yellow);
SetFillStyle(1,2);
Bar(45,330,190,400);
For I:=1 To 20 Do
Begin
SetColor(Blue);
Line(44+i,330,44,365);
Line(211-i,365,191-i,400);
End;
SetColor(Yellow);
Line(64,330,190,330); Line(64,330,44,365);
Line(44,365,170,365); Line(170,365,190,330);
Line(190,330,190,365); Line(190,365,170,400);
Line(170,365,170,400); Line(170,400,44,400);
Line(44,400,44,365); Line(64,330,64,365);
{- 7 -}
{- 7.1 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(88,265,102,310);
FillEllipse(95,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310,8,3);
SetColor(Yellow);
Rectangle(93,311,97,350);
SetFillStyle(1,Blue);
FillEllipse(95,310,3,2);
SetColor(Blue);
Line(93,350,97,350);
SetColor(Yellow);
Ellipse(95,350,180,360,2,1);
{- 7.2 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(138,265,152,310);
FillEllipse(145,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(145,310,8,3);
SetColor(Yellow);
Rectangle(143,311,147,350);
SetFillStyle(1,Blue);
FillEllipse(145,310,3,2);
SetColor(Blue);
Line(143,350,147,350);
SetColor(Yellow);
Ellipse(145,350,180,360,2,1);
{- 2 -}
SetColor(Yellow);
Line(95,47,95,215);
Line(145,47,145,215);
Line(95,220,95,263);
Line(145,220,145,263);
Line(95,257,89,263);
Line(95,257,101,263);
Line(145,257,139,263);
Line(145,257,151,263);
SetFillStyle(1,Black);
Bar(138,130,148,132);
Rectangle(138,130,148,132);
For I:=1 To 50 Do
Begin
SetColor(9);
Line(98,254,98,254+i);
Line(99,254,99,254+i);
Line(148,254,148,254+i);
Line(149,254,149,254+i);
Delay(1000);
End;
For B:=1 To W Do
Begin
Sound(100+(B*5));
If B=3 Then a:=a+1;
If B=6 Then a:=a+1;
If B=9 Then a:=a+1;
If B=12 Then a:=a+1;
If B=15 Then a:=a+1;
If B=17 Then a:=a+1;
If B=19 Then a:=a+1;
If B=21 Then a:=a+1;
If B=23 Then a:=a+1;
If B=25 Then a:=a+1;
If B=25 Then a:=a+1;
SetColor(Yellow);
Ellipse(95,310-B,360,0,6,2);
Ellipse(145,310-(B+a),360,0,6,2);
Delay(7000);
SetColor(9);
SetFillStyle(1,9);
FillEllipse(95,310-B,6,2);
FillEllipse(145,310-(B+a),6,2);
End;
SetColor(Yellow);
Ellipse(95,310-B,360,0,6,2);
Ellipse(145,310-(B+a),360,0,6,2);
For I:=1 To 14 Do
Begin
SetFillStyle(1,Blue);
Bar(98,252+i*2,99,255+i*2);
Bar(148,254+i,149,255+i);
Delay(1000);
End;
SetColor(Yellow);
Line(95,220,95,263);
Line(145,220,145,263);
Line(95,257,89,263);
Line(95,257,101,263);
Line(145,257,139,263);
Line(145,257,151,263);
FillEllipse(95,265,8,3);
FillEllipse(145,265,8,3);
NoSound;
Sound(100);
Delay(10000);
NoSound;
{- 5 -}
Sound(100);
Delay(10000);
Nosound;
For I:=1 To 149 Do
Begin
Sound(500-(i*3));
SetColor(Red);
SetFillStyle(1,Red);
FillEllipse(75-i,235,2,5);
SetColor(Yellow);
Ellipse(75-i,235,90,270,2,5);
SetColor(Yellow);
SetFillStyle(1,Black);
Bar(50-i,234,35-i,236);
Line(35-i,233,35-i,237);
SetFillStyle(1,0);
FillEllipse(166-i,235,3,5);
SetColor(Blue);
Ellipse(167-i,235,270,90,3,5);
{- 6 -}
SetColor(Yellow);
SetFillStyle(1,Black);
Bar(97-i,235,100-i,253);
Bar(147-i,235,150-i,253);
Rectangle(97-i,235,100-i,253);
Rectangle(147-i,235,150-i,253);
SetColor(Red);
Line(101-i,231,101-i,254);
Line(151-i,231,151-i,254);
SetColor(Yellow);
Line(101-i,240,101-i,240);
Line(151-i,240,151-i,240);
SetColor(Blue);
Line(101-i,241,101-i,254);
Line(151-i,241,151-i,254);
Delay(700);
SetColor(Yellow);
Line(95,220,95,263);
Line(145,220,145,263);
End;
NoSound;
Sound(100);
Delay(10000);
NoSound;
For I:=C To 53 Do
Begin
If C=40 Then y:=C;
SetColor(8);
SetFillStyle(1,9);
Bar(144,310,146,311+C);
Bar(94,310,96,311+C);
SetColor(Yellow);
Delay(1000);
SetColor(Yellow);
Ellipse(145,350,180,360,2,1);
Ellipse(95,350,180,360,2,1);
Sound(100+C);
End;
For D:=1 To W Do
Begin
SetColor(Yellow);
SetFillStyle(1,9);
FillEllipse(95,310-B+D,6,2);
FillEllipse(145,310-(B+a)+D,6,2);
SetColor(Blue);
Ellipse(95,309-B+D,0,180,6,2);
Ellipse(145,309-(B+a)+D,0,180,6,2);
Delay(6000);
Sound(153+D);
End;
For E:=1 To 19 Do
Begin
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310,6,2);
SetColor(Blue);
SetFillStyle(1,Blue);
Bar(94,310+E,96,311+E);
Delay(3000);
Sound(178+E);
End;
SetColor(Yellow);
Line(90,330,100,330);
For FF:=1 To 32 Do
Begin
SetFillStyle(1,2);
Bar(94,331+FF,96,332+FF);
Delay(1000);
Sound(197+FF);
End;
SetColor(Yellow);
Ellipse(95,350,180,360,2,1);
SetColor(Yellow);
Line(88,265,88,310);
Line(102,265,102,310);
U:=1;
For G:=1 To W+7 Do
Begin
If G=8 Then
Begin
SetColor(Yellow);
OutTextXY(121,138,8);
SetColor(Black);
OutTextXY(121,130,7);
End;
If G=16 Then
Begin
SetColor(Yellow);
OutTextXY(121,146,9);
SetColor(Black);
OutTextXY(121,138,8);
End;
If G=24 Then
Begin
SetColor(Yellow);
OutTextXY(118,154,10);
SetColor(Black);
OutTextXY(121,146,9);
End;
If G=32 Then
Begin
SetColor(Yellow);
OutTextXY(118,162,11);
SetColor(Black);
OutTextXY(118,154,10);
End;
If G=15 Then y:=G;
If G=3 Then u:=u+1;
If G=6 Then u:=u+1;
If G=9 Then u:=u+1;
If G=12 Then u:=u+1;
If G=15 Then u:=u+1;
If G=18 Then u:=u+1;
If G=21 Then u:=u+1;
If G=24 Then u:=u+1;
If G=27 Then u:=u+1;
If G=29 Then u:=u+1;
If G=30 Then u:=u+1;
If G=30 Then u:=u+1;
If G=32 Then u:=u+1;
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,265-G,7,3);
SetColor(Blue);
Ellipse(95,266-G,180,360,6,3);
Ellipse(95,267-G,180,360,6,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310-G,8,3);
SetColor(Blue);
Ellipse(95,311-G,180,360,8,3);
Ellipse(95,312-G,180,360,8,3);
SetColor(Yellow);
Rectangle(93,311-G,97,350-G);
SetFillStyle(1,Blue);
FillEllipse(95,310-G,3,2);
SetColor(Yellow);
Ellipse(95,350-G,180,360,2,1);
If G=21 Then
Begin
SetColor(2);
Ellipse(95,351-G,180,360,3,2);
End
Else
Begin
SetColor(Blue);
Ellipse(95,351-G,180,360,3,2);
End;
SetColor(Yellow);
Line(95,257-G,89,263-G);
Line(95,257-G,101,263-G);
SetColor(Blue);
Line(95,258-G,90,264-G);
Line(95,258-G,100,264-G);
{- 7.2 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(138,265+G,152,310+G);
FillEllipse(145,265+G,8,3);
SetColor(Blue);
Ellipse(145,264+G,0,190,8,3);
Line(137,265,137,310);
Line(153,265,153,310);
Line(87,265,87,310);
Line(103,265,103,310);
SetColor(Yellow);
SetFillStyle(1,9);
FillEllipse(145,310+G,7,3);
Bar(144,348+y,146,347+y);
SetColor(9);
Ellipse(145,310+G,0,190,7,3);
SetColor(Yellow);
Rectangle(143,313+G,147,350+y);
SetColor(Yellow);
Line(145,47,145,256+G);
Line(145,220+G,145,263+G);
Line(145,257+G,139,263+G);
Line(145,257+G,151,263+G);
SetColor(Blue);
Line(145,256+G,139,262+G);
Line(145,256+G,151,262+G);
SetColor(Yellow);
SetFillStyle(1,Black);
Bar(138,130+G,148,132+G);
Rectangle(138,130+G,148,132+G);
SetFillStyle(1,Blue);
Bar(138,129+G,144,129+G);
Bar(145,129+G,149,129+G);
SetColor(Yellow);
SetFillStyle(1,9);
FillEllipse(145,309-(B+a)+D+(G+u),6,2);
SetColor(Blue);
Ellipse(145,308-(B+a)+D+(G+u),0,180,6,2);
Ellipse(145,307-(B+a)+D+(G+u),0,180,6,2);
Ellipse(145,305-(B+a)+D+(G+u),0,180,6,2);
Ellipse(145,304-(B+a)+D+(G+u),0,180,6,2);
Delay(5000);
SetColor(Yellow);
Line(80,330,100,330);
SetColor(2);
Line(80,331,100,331);
Line(80,332,100,332);
If G24 Then
Begin
SetFillStyle(1,2);
Bar(139,331,151,339);
SetColor(Yellow);
Line(140,330,150,330);
End;
Sound(129+G);
End;
SetFillStyle(1,2);
Bar(144,340,146,363);
Nosound;
Q:=W+7;
SetColor(Blue);
Line(95,257-Q,90,262-Q);
Line(95,257-Q,100,262-Q);
For I:=1 To W+7 Do
Begin
{- 7.1 -}
Sound(129+G+I);
SetColor(Yellow);
Line(95,260-Q+i,95,200);
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(88,265-Q+I,102,310-Q+I);
FillEllipse(95,265-Q+I,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310-Q+I,7,3);
SetColor(Yellow);
Rectangle(93,311-Q+I,97,350-Q+I);
SetFillStyle(1,Blue);
FillEllipse(95,310-Q+I,3,2);
SetColor(Blue);
Line(93,350-Q,97,350-Q);
Ellipse(95,264-Q+I,0,180,8,3);
Ellipse(95,308-Q+I,0,180,6,3);
SetColor(Yellow);
Ellipse(95,350-Q,180,360,2,1);
{- 7.2 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(138,265+Q-i,152,310+Q-i);
FillEllipse(145,265+Q-i,7,3);
SetColor(Yellow);
SetFillStyle(1,2);
FillEllipse(145,310+Q-i,8,3);
SetColor(Blue);
Ellipse(145,267+Q-I,180,360,6,3);
SetColor(Blue);
Ellipse(145,311+Q-i,180,360,8,3);
SetColor(Yellow);
Rectangle(143,311+Q-i,147,330+Q-i);
SetFillStyle(1,2);
FillEllipse(145,310+Q-i,3,2);
SetColor(Yellow);
Ellipse(145,330+Q-i,180,360,2,1);
If I15 Then Begin
SetColor(2);
Line(140,335+i,150,335+i);
End;
Delay(3000);
If I15 Then Begin
SetColor(2);
Line(140,335+i,150,335+i);
End;
SetFillStyle(1,2);
Bar(130,331,155,340);
End;
NoSound;
{- Finish Animation -}
{- Kirpich -}
SetColor(Yellow);
SetFillStyle(1,2);
Bar(45,330,190,400);
For I:=1 To 20 Do
Begin
SetColor(Blue);
Line(44+i,330,44,365);
Line(211-i,365,191-i,400);
End;
SetColor(Yellow);
Line(64,330,190,330); Line(64,330,44,365);
Line(44,365,170,365); Line(170,365,190,330);
Line(190,330,190,365); Line(190,365,170,400);
Line(170,365,170,400); Line(170,400,44,400);
Line(44,400,44,365); Line(64,330,64,365);
{- 7 -}
{- 7.1 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(88,265,102,310);
FillEllipse(95,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(95,310,8,3);
SetColor(Yellow);
Rectangle(93,311,97,350);
SetFillStyle(1,Blue);
FillEllipse(95,310,3,2);
SetColor(Blue);
Line(93,350,97,350);
SetColor(Yellow);
Ellipse(95,350,180,360,2,1);
{- 7.2 -}
SetColor(Yellow);
SetFillStyle(1,Blue);
Rectangle(138,265,152,310);
FillEllipse(145,265,8,3);
SetColor(Yellow);
SetFillStyle(1,Blue);
FillEllipse(145,310,8,3);
SetColor(Yellow);
Rectangle(143,311,147,350);
SetFillStyle(1,Blue);
FillEllipse(145,310,3,2);
SetColor(Blue);
Line(143,350,147,350);
SetColor(Yellow);
Ellipse(145,350,180,360,2,1);
SetColor(Yellow);
Line(95,47,95,215);
Line(145,47,145,215);
Line(95,220,95,263);
Line(145,220,145,263);
Line(95,257,89,263);
Line(95,257,101,263);
Line(145,257,139,263);
Line(145,257,151,263);
End;
SetColor(10);
SetTextStyle(5,0,1);
OutTextXY(190,410,Dlya Zaversheniya Programmy Nagmite);
SetColor(10);
SetTextStyle(7,0,1);
OutTextXY(520,415,ENTER);
Repeat;
Delay(10000);
SetColor(Yellow);
SetTextStyle(7,0,1);
OutTextXY(520,415,ENTER);
Sound(1000);
Delay(50000);
SetColor(Red);
SetTextStyle(7,0,1);
OutTextXY(520,415,ENTER);
NoSound;
Until Keypressed;
ReadLn;
{---------------------------------------------------------}
End;
Procedure Anim2;
Begin
End;
{6666666666666666666666666666666666666666666666666666}
Procedure opis;
Begin
{ClearDevice;}
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);
For I:=1 To 250 Do
Begin
Sound(2000-(i*5));
SetFillStyle(1,Yellow);
Bar(380,20+i,600,52+i);
End;
SetFillStyle(1,Black);
Bar(382,22,598,300);
NoSound;
For I:=1 To 10 Do
Begin
Delay(1000);
End;
Begin
Delay(60000);
Sound(1000);
SetColor(10);
Delay(1000);
SetTextStyle(0,0,0);
OutTextXY(390,35,1 - );
SetColor(Red);
OutTextXY(420,35,Block);
Sound(920);
SetColor(10);
Delay(1000);
OutTextXY(390,50,2 - );
SetColor(Red);
OutTextXY(420,50,Otchetnayia Ustanovka);
Sound(840);
SetColor(10);
Delay(1000);
OutTextXY(390,65,3 - );
SetColor(Red);
OutTextXY(420,65,Izmeritel Pokazanyia);
Sound(760);
SetColor(10);
Delay(1000);
OutTextXY(390,80,4 - );
SetColor(Red);
OutTextXY(420,80,Udergivayushaya zamok);
Sound(680);
SetColor(10);
Delay(1000);
OutTextXY(390,95,5 - );
SetColor(Red);
OutTextXY(420,95,Vodaprovod);
Sound(600);
SetColor(10);
Delay(1000);
OutTextXY(390,110,6 - );
SetColor(Red);
OutTextXY(420,110,Vodaprovodki);
Sound(520);
Delay(1000);
SetColor(10);
OutTextXY(390,125,7 - );
SetColor(Red);
OutTextXY(420,125,Tsilindri);
Sound(440);
Delay(1000);
SetColor(10);
OutTextXY(390,140,8 - );
SetColor(Red);
OutTextXY(420,140,Rezervuar);
Sound(360);
Delay(1000);
SetColor(10);
OutTextXY(390,155,9 - );
SetColor(Red);
OutTextXY(420,155,Shkala);
Sound(280);
Delay(1000);
SetColor(10);
OutTextXY(390,170,10- );
SetColor(Red);
OutTextXY(420,170,Plastina);
Sound(200);
Delay(1000);
SetColor(10);
OutTextXY(390,185,11- );
SetColor(Red);
OutTextXY(420,185,Stopornyia Diska - 1);
Sound(120);
Delay(1000);
SetColor(10);
OutTextXY(390,200,12- );
SetColor(Red);
OutTextXY(420,200,Stopornyia Diska - 2);
Delay(5000);
Nosound;
End;
ReadLn;
End;
Procedure MENU;
Begin
ClearDevice;
SetBkColor(BLACK);
SetColor(Yellow);
SetFillStyle(1,Yellow);
Bar(0,0,700,500);
SetFillStyle(1,Blue);
Bar(2,2,636,477);
x1:=round(getmaxx/2-170);
y1:=round(getmaxy/2-80);
x2:=round(getmaxx/2+160);
y2:=round(getmaxy/2+100);
setfillstyle(1,14);
bar(170,175,448,345);
setfillstyle(1,0);
bar(172,177,446,343);
K:=1;
SetTextStyle(1,0,1);
repeat
if K=1 then begin Sound(10000);color1:=14;color2:=4;color3:=4;color4:=4;Delay(1000);NoSound end;
if K=2 then begin Sound(10000);color1:=4;color2:=14;color3:=4;color4:=4;Delay(1000);NoSound end;
if K=3 then begin Sound(10000);color1:=4;color2:=4;color3:=14; color4:=4;Delay(1000);NoSound end;
if K=4 then begin Sound(10000);color1:=4;color2:=4;color3:=4;color4:=14;Delay(1000);NoSound end;
setcolor(color1);outtextxy(150,200, 1. Teorya);
setcolor(color2);outtextxy(150,230, 2. Resunok Pribora);
setcolor(color3);outtextxy(150,260, 3. Animatsiya Pribora );
setcolor(color4);outtextxy(150,290, 4. Exit);
Key:=readkey;
if key=#080 then begin k:=k+1; if k4 then k:=1; end;
if key=#072 then begin k:=k-1; if k1 then k:=4; end;
if key=#13 then begin if K=2 THEN BEGIN suret;if key=#13 then MENU;END;
if K=1 then BEGIN {click;}Vvedenia;{vvedenia1;} if key=#13 then MENU;END;
if K=3 then begin anim1;
if key=#13 then MENU;END;
if key=#27 then begin anim2;if Key=#13 then MENU;END;
if K=4 THEN break;
end;
until INFINITE2;END;
Begin
Gd := 0;
InitGraph(Gd, Gm, FunWeb);
MENU;
For I:=1 To 2 Do
Begin
Delay(60000);
SetFillStyle(1,Black);
Bar(0,0,700,500);
SetTextStyle(0,0,0);
SetColor(White);
OutTextXY(240,220,Abilkhairova Meruert);
OutTextXY(290,240,JIN-915);
End;
CloseGraph;
End.
Заключение
Сам процесс изучения физических закономерностей и явлений считается очень сложным. Но с помощью компьютерного моделирования можно разработать хороший метод познания. Такой метод познания осуществляется с помощью анимационо-обучающей программы. Преимущество этого метода при обучении заключаются в следующем:
- Комплексно визуально наблюдать изучаемые физические явления;
- Варирия параметрами моделей, можно вскрыть различные стороны этого явления;
- С помощью обучающих программ можно резко повысить интеллектуальный уровень не только обучающего но и обучаемого;
- Создание таких комплекс программ расширяет программное обеспечение компьютеров;
Список использованной литературы
1. И. Е. Иродов “Основные законы механики ” (стр. 120-128)
2. М. М. Архангельский “ Курс физики. Механика ” (стр. 96-109)
3. А. И. Марченко , Л. А. Марченко “Программирование в среде Turbo Pascal ”
4. Я.Б.Зельдович “Высшая математика для начинающих ” (стр. 383-394)
5. Э.Е. Эвенчик, С.Я.Шамаш, В.А.Орлов. “Методика преподования физики средней школе ” (стр.199-205)
Из саитов интернета:
1. www.Bankreferat.ru
2. www.Mail.ru
3. www.Referats.ru
4. www.Aport.ru
5. www.Rambler.ru