Разработка электропривода лифта
СОДЕРЖАНИЕ: Общая характеристика и принцип работы лифта, его основные составные части и порядок их взаимодействия. Классификация лифтов, их разновидности и отличительные черты. Порядок разработки силовой части электропривода грузового лифта, расчет мощности.Задание
1. Разрабатываемое устройство
Силовая часть электропривода грузового лифта
2. Область применения устройства
Грузовой лифт предназначен для подъёма груза с нижней площадки на верхнюю. Вниз клеть может спускаться как без груза, так и с грузом.
Цикл работы лифта включает в себя времена подъёма и опускания клети, а также времена загрузки и выгрузки.
Подъём клети происходит с установившейся скоростью Vр, а опускание – со скоростью Vв Vр.
Лифт является разновидностью подъемника и представляет собой транспортное средство прерывного действия, предназначенное для подъема и спуска людей (грузов) с одного уровня на другой. Кабина (платформа) лифта перемещается вдоль неподвижных вертикальных жестких направляющих, установленных в шахте, снабженной на посадочных (загрузочных) площадках запираемыми дверями (ГОСТ 23748–79).
Подъемниками называют грузоподъемные машины циклического действия, предназначенные для перемещения грузов в сосудах (или на площадках) в вертикальном или наклонном направлениях. Они отличаются от кранов тем, что грузовой сосуд движется по направляющим. Грузоподъемность подъемников – 0,25…50 т, скорость подъема – 0,1… 16 м/с (шахтные подъемники).
Различают: строительные подъемники, шахтные подъемные машины, доменные подъемники, лифты для подъема людей и грузов и др.
В зависимости от типа сосудов подъемники разделяют на клетьевые, скиповые и специальные. Подъем осуществляется канатами. Однако для подъема на большую высоту (буровые вышки, телевизионные башни и др.) применяют также бесканатные подъемники, где передвижение кабины осуществляются за счет силы трения приводных роликов, прижимающихся к направляющим, или реечной передачей.
3. Определение основных технических данных разработки
В процессе расчета необходимо определить наиболее загруженный для двигателя режим работы, обеспечить выполнение требований по ускорению лифта и возможность его работы с разными грузами на подъем и на спуск.
Данная разработка может быть использована при производстве и монтаже ЭП грузового лифта для перемещения людей и грузов в шахтах.
4. Технические требования
Приводной двигатель соединяется своим валом со шкивом ленточного тормоза через эластичную муфту;
Массой деталей шлицевого соединения и муфты пренебречь;
Вращение канатоведущего шкива осуществляется через редуктор;
При расчете момента инерции механизма принять, что лифт работает при максимальной загрузке;
Удержание ротора в неподвижном состоянии при отключенном двигателе осуществляется ленточным тормозом;
Электропривод ротора должен обеспечивать возможность плавного пуска двигателя до номинальной скорости;
Основные технологические операции рабочего цикла грузового лифта выполняются в следующей последовательности:
1. Загрузка клети;
2. Разгон двигателя до номинальной скорости на подъем;
3. Движение при номинальной скорости подъема;
4. Торможение лифта до полной остановки, наложение механического тормоза;
5. Разгрузка клети;
6. Разгон двигателя до номинальной скорости на спуск;
7. Движение при номинальной скорости спуска;
8. Торможение лифта до полной остановки, наложение механического тормоза;
9. Разгрузка клети.
Перечень сокращений и обозначений
АД – асинхронный двигатель
ПЧ–АД – преобразователь частоты – асинхронный двигатель
ПЧ – преобразователь частоты
УУКиС – устройство управления, контроля и сигнализации
ЭП – электропривод
5. Конструкция и данные
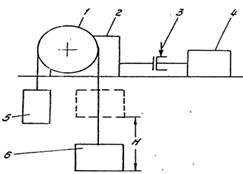
Рисунок 1 – Кинематическая схема лифта
1 – канатоведущий шкив;
2 – редуктор;
3 – тормозной шкив;
4 – двигатель;
5 – клеть;
6 – противовес
Условия эксплуатации оборудования:
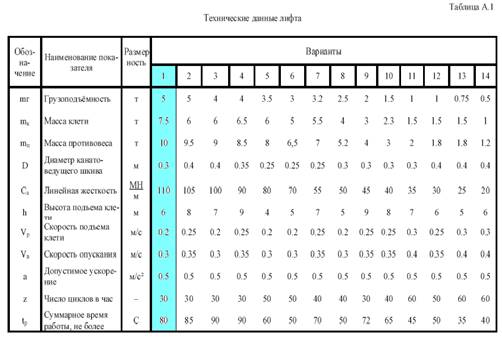
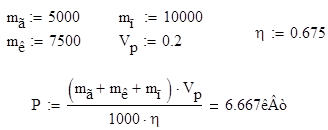
1. Максимальная загрузка лифта составляет 5000 кг (Все расчеты производить с учётом полной загрузки клети лифта, т.е 5000 кг);
2.Загрузка и выгрузка производиться при полной остановке лифта;
3.Питание электропривода осуществляется от сети переменного тока с напряжением 380В.
Содержание
Введение
1. Конструкция, технические характеристики, типы лифтов (подъёмников)
2. Основные технические требования при проектировании, установке и эксплуатации лифтов (подъёмников)
3. Выбор рода тока и типа электропривода
4. Расчет мощности и выбор приводного электродвигателя; определение передаточного числа и выбор редуктора
4.1 Выбор двигателя
4.2 Выбор редуктора
5. Расчёт приведенных статических моментов (моментов сопротивлений), моментов инерции и коэффициента жёсткости системы…28
6. Предварительная проверка двигателя по нагреву и производительности
7. Допустимая частота пусков
8. Построение механической характеристики
9. Построение переходных процессов
Литература
Введение
Лифт является разновидностью подъемника и представляет собой транспортное средство прерывного действия, предназначенное для подъема и спуска людей (грузов) с одного уровня на другой. Кабина (платформа) лифта перемещается вдоль неподвижных вертикальных жестких направляющих, установленных в шахте, снабженной на посадочных (загрузочных) площадках запираемыми дверями (ГОСТ 23748–79). Конструктивно лифт состоит их шахты оборудованной дверями, установленными в порталах, приямком и машинным помещением с подъемной приводной лебедкой. Под шахтой понимается пространство, в котором перемещается платформа или кабина и противовес, а также установлено другое оборудование лифта, а машинное помещение – часть шахты (или иное помещение), предназначенная для установки приводного механизма, аппаратуры управления и другого оборудования лифта.
Основное назначение подъемно-транспортных машин – подъем и перемещение грузов. В настоящее время в связи с развитием техники, совершенствованием производственных процессов на предприятиях народного хозяйства подъемно-транспортные машины имеют большое значение. Развитие многих отраслей промышленности, транспорта и строительства связано с развитием и совершенствованием подъемно-транспортных машин.
Современное состояние строительства гражданских и промышленных зданий было бы невозможно без технически совершенных подъемно-транспортных машин. Работа промышленных предприятий, портов, железнодорожных узлов невозможна без механизации процесса подъема и перемещения грузов.
Значение подъемно-транспортных машин заключается в том, что они являются эффективными средствами механизации на крупных промышленных предприятиях, в строительстве и на транспорте, выполняя наиболее трудоемкие процессы по перемещениям различного рода грузов.
Основной целью данного курсового проекта является решение задачи проектирования и исследования силовой части электропривода грузового лифта, а также достижение цели в том чтобы результаты проектирования могли быть использованы при производстве, монтаже и эксплуатации электропривода грузового лифта на любых предприятиях.
Но в данном курсовом проекте необходимо произвести проектирование и расчеты только силовой части электропривода , а в проектировании и расчетах пускорегулирующей аппаратуры, аппаратуры защиты, аварийного отключения, аварийного освещения, аварийного управления, связи и др., и составлении их электрических схем нет необходимости так как это является отдельными разработками.
1. Конструкция, технические характеристики, типы лифтов (подъёмников)
Внутри шахты вдоль вертикальных направляющих движутся кабина и противовес. Кабина и противовес подвешены на стальных проволочных канатах, которые крепятся к кабине посредством подвески. Тяговое усилие на канатах создается при вращении канатоведущего шкива при включенном приводном электродвигателе. Для остановки и удержания кабины и противовеса в неподвижном состоянии при отключенном электродвигателе служит тормоз. В приямке расположены натяжное устройство ограничителя скорости и буфера. Ограничитель скорости кинематически связан канатом с натяжным устройством и с ловителями, башмаки которых предназначены для остановки кабины, свободно движущейся вдоль направляющих, в случае обрыва или ослабления канатов, а также при превышении кабиной (противовесом) заданных величин скорости движения. Ограничитель скорости установлен в машинном помещении и связан с кабиной канатом.
Для управления движением кабины служит кнопочный аппарат, расположенный внутри на стенке кабины. Электрический сигнал от кнопочного аппарата передается по подвесному кабелю и проводам в шахте в машинное помещение на шкаф управления лифтом. Привод лифта обычно обеспечивает возможность перемещения кабины в двух режимах – на большой и малой скорости. Переключение с большой скорости на малую осуществляется этажным переключателем (датчиком), на который при подходе кабины воздействует отводка (шунт). Движение кабины с малой скоростью продолжается до подхода кабины к датчику точной остановки, закрепленному на стенке шахты. По сигналу датчика точной остановки электродвигатель лебедки и катушка приводного электромагнита тормоза отключаются от сети и кабина затормаживается и удерживается тормозом в неподвижном состоянии. Одновременно подается питание на электродвигатель привода дверей кабины. Двери автоматически открываются совместно с дверями шахты и остаются открытыми после выхода пассажиров из кабины в течение сравнительно малого промежутка времени, задаваемого реле времени в цепи управления лифтом. Затем реле времени замыкает свои контакты и подает питание на электродвигатель привода дверей кабины – двери закрываются. Лифт свободен и готов к работе по вызову, о чем свидетельствуют погасшие сигнальные лампы вызывных аппаратов, установленные на каждом посадочном этаже.
Лебедка лифта может иметь нарезной грузовой барабан или канатоведущий шкив. Барабанные лебедки применяются в настоящее время сравнительно редко, преимущественно в лифтах без противовеса, когда установка противовеса затруднена или невозможна. От канатоведущего шкива тяговое усилие передается канатом за счет действия сил трения между канатом и шкивом. Для увеличения сил трения шкив имеет ручьи (т.е. углубления на образующей цилиндрической поверхности), форма которых при данном угле обхвата шкива каната, выбранном материале и конструкции шкива позволяет обеспечивать сцепление каната со шкивом, достаточное для удержания кабины при статических испытаниях, и исключает возможность подъема кабины при неподвижном противовесе или противовеса при неподвижной кабине.
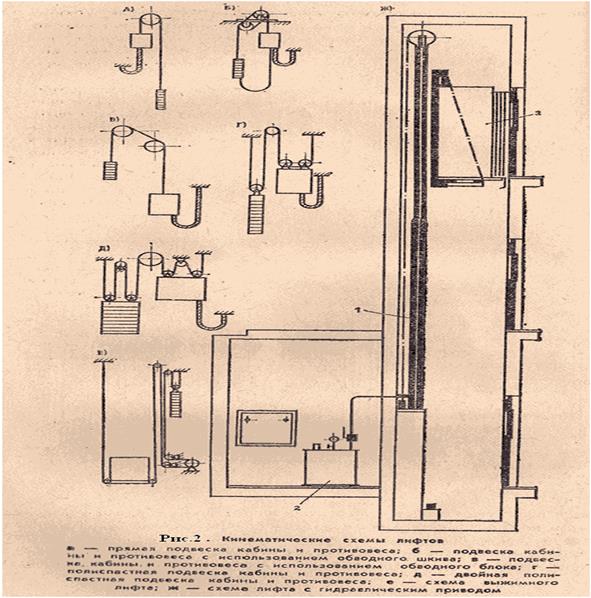
Преимущественное распространение получили лифты с верхним расположением привода. Нижнее расположение привода характерно для выжимных и тротуарных лифтов. Для малых грузовых лифтов возможно расположение привода сбоку шахты. Основные кинематические схемы лифтов приведены на рис. 2.
Габаритные размеры и конструкция лифтов определяется их назначением, расположением кабины и противовеса в плане и размещением дверных проемов в шахте. Преимущественное распространение в лифтах жилых, административных и промышленных зданий получили шахты и кабины с входом с одной стороны на всех этажах. Иногда предусматривают две двери на противоположных стенах или в двух смежных стенах, расположенных под углом.
Лифты подразделяют (ГОСТ 23748–79) по следующим основным признакам:
а) по виду транспортируемых грузов на: пассажирские , предназначенные для подъема и спуска людей, в том числе с предметами домашнего обихода, если общая масса людей и груза не превышает грузоподъемности лифта; больничные – для подъема и спуска больных на больничных транспортных средствах в присутствии сопровождающего персонала; грузовые – для транспортировки грузов в сопровождении проводника или специально выделенных людей без проводника, в том числе грузовые малые для транспортировки грузов без проводника, причем в последнем случае ограничены грузоподъемность, высота и площадь кабины с целью исключения входа человека в кабину при ее разгрузке и загрузке;
б) по виду грузонесущего устройства : на лифты, оборудованные кабиной или платформой ;
в) по виду тягового органа , предназначенного для перемещения кабины или платформы: на канатные, цепные, реечные, винтовые и плунжерные ;
г) по виду привода на электрические и гидравлические (грузовые);
д) по виду привода дверей на лифты с дверями, открываемыми вручную, полуавтоматически и автоматически ;
е) по виду шахты : на лифты, устанавливаемые в глухой шахте , огражденной на всю высоту и со всех сторон сплошными стенами; устанавливаемые в металлосетчатой шахте , огражденной со всех сторон и на всю высоту металлической сеткой; устанавливаемые в комбинированной шахте , часть которой глухая, а часть – металлосетчатая;
ж) по конструкции дверей шахты и кабины на лифты: с распашными дверями (грузовые, больничные и пассажирские для производственных зданий); с горизонтально-раздвижными дверями; с горизонтально-раздвижными дверями , перемещающимся по криволинейным направляющим, с вертикально-раздвижными дверями ;
з) по расположению машинного помещения на лифты: с машинным помещением, расположенным над шахтой, под шахтой и сбоку от шахты ;
и) по виду системы управления на лифты: с кнопочным внутренним управлением , при котором пуск кабины осуществляется посредством воздействия на кнопки аппарата, находящегося в кабине, а ее остановка на посадочной (загрузочной) площадке происходит автоматически; с кнопочным наружным управлением (грузовые лифты), при котором пуск кабины осуществляется посредством воздействия на кнопки аппарата, установленного вне кабины, а ее остановка на посадочной (загрузочной) площадке происходит автоматически; с простым управлением , обеспечивающим регистрацию только одного приказа или вызова; с собирательным управлением только при движении вниз; с групповым управлением , при котором обеспечивается управление группой лифтов с общей регистрацией вызовов и автоматическим выбором кабин для их выполнения, в том числе только с групповым управлением при движении вниз; с программным управлением одним или группой лифтов, позволяющим установить программу работы лифтов автоматически или вручную.
Основными показателями лифтов (ГОСТ 26334–84) являются грузоподъемность и номинальная скорость движения кабины. Ряд грузоподъемностей лифтов, согласно ГОСТ 26334–84, следующий: 40, 100 (160), 250 (320), 400 (500), 630, 800, 1000, 1200, 1600, 2000, 2500 (3200), 4000 (5000), 6300 кг. Номинальная скорость движения кабины лифта должна составлять: 0,14; 0,2; 0,25; 0,4 (0,5); 0,63 (0,71); 1,0 (1,4); 1,6 (2,0); 2,5 (2,8); 4,0 (5,6); 6,3 м/с. Параметры, указанные в скобках, не являются предпочтительными. Значение фактической скорости движения кабины не должно отличаться от приведенных выше величин более чем на ±15%. Средняя величина ускорения (замедления) движения кабины лифта при нормальных режимах эксплуатации должна быть (ГОСТ 12.2.074–82 ССБТ) не более 1,5 м/с2 – у больничного и 2 м/с2 – у прочих лифтов. Точность остановки кабины на уровне посадочной (загрузочной) площадки должна быть в пределах ±20 мм у грузовых лифтов с загрузкой средствами напольного транспорта, а также у больничных лифтов и ±50 мм – у прочих лифтов.
Полезная площадь пола кабины в зависимости от ее вместимости (ГОСТ 12.3.075–82 ССБТ) должна соответствовать данным табл. 2.
| Таблица 2. Полезная площадь пола кабины в зависимости от ее вместимости | |||||
| Вместимость кабины, чел. | Полезная площадь пола кабины, м2 , не более | Вместимость кабины, чел. | Полезная площадь пола кабины, м2 , не более | Вместимость кабины, чел. | Полезная площадь пола кабины, м2 , не более |
| 3 | 0,70 | 11 | 2,05 | 19 | 3,25 |
| 4 | 0,90 | 12 | 2,20 | 20 | 3,40 |
| 5 | 1,10 | 13 | 2,35 | 21 | 3,52 |
| 6 | 1,30 | 14 | 2,50 | 22 | 3,64 |
| 7 | 1,45 | 15 | 2,65 | 23 | 3,76 |
| 8 | 1,60 | 16 | 2,80 | 24 | 3,88 |
| 9 | 1,75 | 17 | 2,95 | 25 | 4,00 |
| 10 | 1,90 | 18 | 3,10 | ||
Допускается увеличивать полезную площадь пола кабины до: 1,17 м2 – для вместимости 5 человек; 1,66 м2 – для 8 чел., 2,35 м2 – для 12 чел., 3,56 м2 – для 20 чел. При вместимости более 25 человек наибольшую полезную площадь пола кабины определяют исходя из удельной нагрузки на пол, равной 500 кг/м2 . Площадь пола кабины определяют исходя из расстояний между стенками купе кабины, причем ту площадь пола, которая перекрывается во время открывания одной из створок распашных дверей, можно в расчет не принимать.
Исходя из полезной площади пола кабины и принципа свободного ее заполнения, а также руководствуясь данными табл. 2, определяют грузоподъемность лифта, принимая массу 1 человека равной 80 кг. Однако, если нормативная полезная площадь пола кабины превышена, то кабина должна быть оборудована ограничителем грузоподъемности и сигнализатором перегрузки. Это условие может не выполняться в лифтах, вместимость которых ограничена до нормы, приведенной в табл. 2, посредством дополнительной запираемой двери. Управление таким лифтом производится только проводником и только с применением специального ключа. Основные параметры лифтов приведены в табл. 3.
| Таблица 3. Основные параметры лифтов | ||||||
| Назначение лифта | Грузоподъемность, кг | Скорость кабины, м/с | Высота подъема, м | Число остановок, не более | Вместимость, чел. | Система управления |
| Пассажирский для жилых зданий (ГОСТ 5746–83*) | 400 630 |
1,0/1,6 1,0/1,6 |
60/85 60/85 |
16/25 16/25 |
5 8 |
Смешанная собирательная при движении вниз |
| Пассажирский для общественных зданий и зданий промышленных предприятий (ГОСТ 5746–83*) | 400 | 0,63 | 70 | 10 | 5 | Смешанная простая |
| 630 | 1,0/1,6 | 40/65 | 10/16 | 8 | Смешанная собирательная в двух направлениях | |
| 800 | 1,0 | 40 | 10 | 10 | ||
| 1,6 | 65 | 16 | ||||
| 2,5 | 100 | 25 | ||||
| 1000 | 1,0 1,6 2,5 4,0 |
45 65 100 150 |
10 16 25 25 |
12 | ||
| 1250 | 1,0 1,6 2,5 4,0 |
45 65 100 150 |
10 16 25 25 |
15 | Смешанная собирательная в двух направлениях с приоритетным вызовом кабины на любой этаж для транспорт. лежачих больных | |
| 1600 | 2,5 4,0 |
100 150 |
25 25 |
20 | ||
| Пассажирский для лечебно-профилактических учреждений (ГОСТ 5746–83*) | 1600 | 1,0 1,6 |
45 65 |
16 16 |
20 | Смешанная собирательная в двух направлениях с приоритетным вызовом кабины на любой этаж для транспорт. лежачих больных |
| Больничный (ГОСТ 5746–83*) | 500 | 0,5 | 45 | 14 | - | Кнопочная внутренняя с проводником и с сигнальным вызовом кабины с любого этажа |
| Грузовой (ГОСТ 8823–85) | 500 1000 |
0,5 | 75 | 20 | - | Кнопочная внутренняя с проводником или кнопочная наружная с основного этажа |
2000 3200 |
45 | 14 | ||||
| 5000 | 0,25 | |||||
| Грузовой с монорельсом | 1000 2000 3200 |
0,5 | 45 | 12 | - | Кнопочная внутренняя с проводником или кнопочная наружная |
| Грузовой выжимной | 500 | 0,5 | 25 | 6 | - | |
1000 2000 3200 |
8 | |||||
| Грузовой тротуарный | 500 | 0,18 | 6,5 | 3 | - | Кнопочная наружная с отметками расположения люка |
| Грузовой малый | 400 | 0,25 | 45 | 14 | - | Кнопочная наружная простая: а) с основной погрузочной площадки; б) со всех погрузочных площадок |
100 250 |
0,4 | |||||
В настоящее время успешно эксплуатируются лифты с гидравлическим приводом (см. рис. 2, ж), количество которых в Скандинавских странах и США составляет более 50% общего числа лифтов. Преимущества гидравлического лифта состоят в отсутствии необходимости применения противовеса; в возможности удаления приводной насосной станции 2 на расстояние до 25 м от приводного гидроцилиндра 1, что способствует снижению уровня шума в здании; в высокой точности остановки кабины 3 на этажах и т.п. Основной недостаток таких лифтов заключается в ограниченной (до 25 м) высоте подъема кабины.
Подъемниками называют группу грузоподъемных машин, с помощью которых перемещение грузов и людей с одного уровня на другой производится в специальных грузонесущих устройствах, движущихся по строго определенному пути.
К подъемникам периодического действия относят: строительные подъемники, шахтные подъемники, скиповые, фуникулеры и лифты.
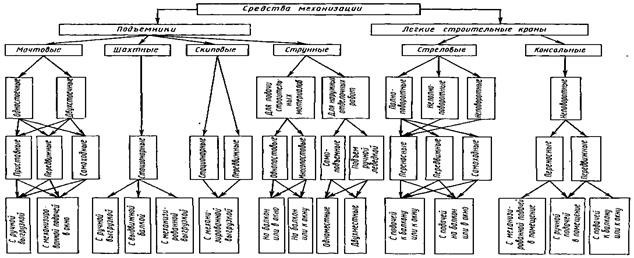
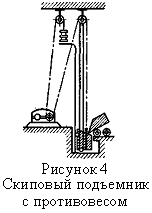
Рисунок 3 – Классификация строительных подъемников и легких кранов
Скиповые подъемники предназначаются для перемещения массовых сыпучих рудных и нерудных материалов в саморазгружающихся ковшах (скипах) по жестким направляющим. Они выполняются с противовесом и без него. При больших высотах подъема рудных ископаемых эти подъемники используются с двумя скипами, движущимися в противоположных направлениях в качестве шахтных скиповых подъемников.
На рисунке 4 показана схема устройства скипового подъемника с противовесом.
Фуникулеры устанавливают в гористых местностях для пассажирского сообщения между нагорной и низменной частью населенных пунктов или городов. Фуникулеры имеют два вагона, уравновешивающих друг друга. Когда один вагон идет вверх, другой спускается вниз. Перемещение вагонов происходит по рельсам от тяги, передаваемой при помощи канатов, наматывающихся на барабан подъемного механизма, установленного наверху.
Строительные подъемники применяют в основном для перемещения грузов строящегося здания в стадии отделочных работ, когда после монтажа стен и перекрытий здания использование башенных кранов невозможно.
Строительные подъемники вместе с легкими строительными кранами представляют собой комплекс средств механизации в стадии отделочных работ при строительстве зданий.
Направление грузовых потоков, обслуживаемых строительными подъемниками, намечается в основном от мест снаружи здания через оконные или балконные проемы во внутрь здания.
По характеру транспортируемых грузов строительные подъемники различают грузовые и грузопассажирские. Последние предназначаются для перемещения строительных рабочих, сопровождающих грузы, и рабочих, выполняющих строительные работы.
По конструкции различают строительные подъемники: мачтовые, шахтные и струнные. Шахтные подъемники состоят из шахт, внутри которых устанавливают направляющие для перемещения грузонесущих устройств. У мачтовых подъемников сооружаются мачты, несущие на себе направляющие. У струнных подъемников в качестве направляющих используют канаты. Мачты выполняют коробчатыми прямоугольными, треугольными или из двух швеллеров, соединенных планками или угольниками. Шахты обычно бывают прямоугольными из уголков и в необходимых случаях с сетчатым ограждением.
При небольшой высоте (12–16 м) и при необходимом расчете на устойчивость самоходные и передвижные мачтовые краны выполняются свободностоящими. Для больших высот применяют стационарные мачты с креплениями к стенам или проемам здания жесткими конструкциями или растяжками из стального каната, снабженного устройством для регулирования натяжения.
Для самоходных подъемников обеспечивается рельсовая колея. Передвижные снабжаются пневматическими колесами, которые в рабочем режиме убираются и заменяются опорной площадкой или опорными винтовыми домкратами. В качестве грузонесущих устройств служат кабины, платформы, ковши. Подача груза осуществляется в оконный проем на крюке подъемной стрелы, движущейся на мачте в направляющих.
Грузонесущие устройства передвигаются лебедками, на которых вал электродвигателя соединяется с редуктором. Выходной вал редуктора соединен с барабаном, на который наматывается тяговый канат, соединенный своим концом после сгибания верхнего блока мачты с грузонесущим устройством. Тормоз – колодочный электромагнитный на быстроходном валу.
На случай обрыва каната предусматриваются ловители: для грузопассажирских подъемников приводятся в действие от специального ограничителя скорости, а для грузовых – от непосредственной связи с несущими канатами.
Установка лебедок у канатных подъемников предусматривается внизу.
По способу подачи грузов подъемники разделяют на подающие грузы в оконный проем и на подающие грузы на перекрытие здания.
По способу монтажа различают подъемники наращиваемые секциями при монтаже снизу или наращиваемые сверху, а также монтируемые комбинированным способом наращивания и опрокидывания.
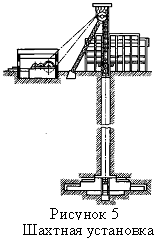
Шахтные подъемники служат для подъема на поверхность добытых в шахте полезных ископаемых, спуска и подъема людей, оборудования и материалов. Основными подъемниками являются те, которые транспортируют полезные ископаемые, а второстепенными – предназначаемые для подъема и спуска людей, грузов и материалов.
Главные шахтные подъемники в качестве грузонесущих сосудов снабжаются скипами, ковшами, бадьями, а вспомогательные – клетями (кабинами). При клетьевом подъеме клеть нагружается вкатываемыми вагонетками. Шахтная установка состоит из:
а) ствола шахты с укрепленными на нем направляющими при вертикальном подъеме или рельсами при наклонном подъеме;
б) околоствольных сооружений, состоящих из загрузочных бункеров и камер для опрокидывания вагонеток и скипов и из приемной площадки для клетьевого подъема и
в) надшахтных сооружений, состоящих из возвышающихся над стволом копра и приемного бункера. При клетьевом подъеме для вкатывания в клеть вагонеток сооружается надшахтное здание с площадками и откаточными путями.
По высоте подъема шахтные подъемники характеризуются малой глубиной – до 300 м, средней – от 300 до 800, большой глубиной – от 800 до 1600 и сверхглубокой – свыше 1600 м.
Подъемные механизмы применяются барабанные и со шкивами трения (канатоведущими шкивами). Максимальная разность статических натяжений канатов от 2,5 до 50 тс (25 до 500 кН).
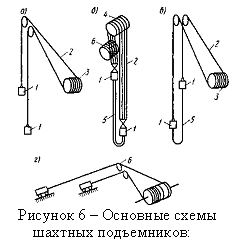
а – однобарабанная без уравновешивающих канатов; б – с канатоведущим шкивом и уравновешивающими канатами; в-двухбарабанная с уравновешивающими канатами; г – двухбарабанная для наклонных шахт; 1 – клети, сосуды; 2 – канаты; 3 – барабаны; 4 – канатоведущим шкив; 5 – уравновешивающие канаты; 6 – отклоняющий блок
Диаметры барабанов для малых подъемных машин колеблются от 1,2 до 3,5 м, а длина барабанов – от 0,8 до 3,8 м. Крупные подъемные машины имеют диаметры от 4 до 6 м, барабаны – длиной от 1,8 до 3,4 м.
Подъемные машины с канатоведущими шкивами имеют диаметры шкивов от 2,1 до 5 м, число применяемых канатов – от 4 до 8.
Скорость подъема: для малых барабанных машин – от 3 до 10 м/с, а крупных – от 12 до 16 м/с; с канатоведущими шкивами у редукторных машин – от 11 до 14 м/с, а у безредукторных – от 12 до 16 м/с.
При однобарабанном двухсосудном или двухконцевом подъеме, когда одна клеть наверху, а другая внизу, канат верхней клети намотан на барабан, в то время как канат нижней клети размотан с барабана и находится в шахте, что связано с креплением концов канатов с разных сторон по диаметру. При подъеме нижней клети и спуске верхней канат нижней клети будет наматываться на барабан, занимая на нем витки сматывающегося каната верхней клети. Если вместо одной из клетей закрепить на канате противовес, то такой подъем будет одноконпевым или однососудным с противовесом.
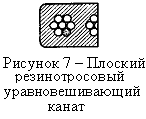
Уравновешивающие канаты (рис. 7) применяют для шахт глубиной более 600 м. Эти канаты рассчитаны на уравновешивание веса канатов, спущенных в шахту до грузонесущего органа. Вес этот увеличивает момент на валу двигателя. В качестве уравновешивающих канатов применяют на шахтных подъемниках специальные плоские канаты.
Тяговые барабаны шахтных подъемников различают цилиндрические с постоянным радиусом (Ц), двухбарабанные (2Ц), с разрезным барабаном (РЦ) и барабаны с переменным радиусом или бицилиндрические (БЦК). При высоте подъема 400 м и более и невозможности применения уравновешивающих канатов применяют барабан с переменным радиусом. При этом канаты на барабан наматываются таким образом, чтобы канат от верхнего грузонесущего органа был намотан со стороны большего радиуса барабана, а канат второго грузонесущего органа, находящегося внизу, – со стороны меньшего радиуса. При таком расположении увеличение момента от веса канатов на стороне клети, расположенной внизу, компенсируется уменьшением момента на барабане и разность моментов останется положительной.
Барабаны малых подъемных машин выполняют литыми из стального литья. Барабаны крупных машин делают сварными. При этом цилиндрические обода барабанов в радиальном направлении укрепляются ребрами таврового сечения. К ободу барабана в торцевых частях справа и слева за ребордами привариваются лобовины с поверхностями для наложения тормозных колодок.
Подъемная барабанная машина с одним цилиндрическим барабаном Ц может обслужить одноконцевой и двухконцевой подъем как по вертикали, так и в наклонных шахтах. Установка при этом получается более компактной, чем при двух барабанах. Однако при однобарабанных машинах невозможно обслуживать несколько горизонтов, усложняется смена и навеска канатов и регулировка после их вытяжки.
Для перевода машин с нижнего горизонта, например, на верхний пользуются установками с двумя барабанами 2Ц с большей канатоемкостью, с одним разрезным барабаном РЦ и БЦК.
Во всех этих случаях имеется два барабана или две части одного разрезного барабана. При этом одна часть барабана или один барабан заклинен на валу, а другая часть или другой барабан (переставная часть или переставной барабан) имеет расцепное устройство, которое при перестановке отсоединяется от вала, и может быть заторможена колодками тормоза. Перестановка осуществляется следующим образом: 1) подъемник устанавливают в такое положение, когда сосуд или клеть от переставного барабана или переставной части барабана находятся на уровне нижнего горизонта, а сосуд от заклиненного барабана или заклиненной части барабана – на верхней приемной площадке; 2) сосуд или клеть переставного или части переставного барабана поднимают на высоту нового горизонта. При этом сосуд от заклиненного барабана или заклиненной части барабана опустится на ту же высоту. В этом положении отсоединяют и затормаживают переставной барабан или его переставную часть; 3) заклиненным барабаном или частью барабана поднимают сосуд до уровня приемной площадки и соединяют переставные части с заклиненными.
Шахтные машины с применением канатоведущих шкивов маркируются буквами ЦШ и цифрами, в которых первая цифра обозначает диаметр канатоведущего шкива в м, а вторая – число применяемых канатов в подвеске – 4, 6 или 8 (ЦШ5х4; ЦШ2,25х6; ЦШ5х6; ЦШ5х8).
Тормозные устройства шахтных подъемников кроме рабочего торможения на остановках и аварийного торможения при нарушениях нормальной работы участвуют также в управлении подъемной установки. В таких случаях тормоз рассматривается как регулируемый, что является основным признаком, отличающим подъемную машину от лебедки.
Привод тормозов шахтных подъемников пневматический или гидравлический в отличие от традиционного электропривода на лебедках.
Торможение осуществляется на валах барабанов или канатоведущих шкивов с двух противоположных сторон колодками, соединенными между собой системой тяг и рычагов.
При торможениях предусматривается поступательное перемещение колодок вместо углового, имеющего место в других системах торможения. При этом тормозной момент в 1,5–1,7 раза больше при тех же условиях углового перемещения.
Автоматическое дистанционное управление осуществляется с помощью специального аппарата задания и контроля АЗК, контролирующего положение сосуда или клети и скорость. С помощью этого аппарата осуществляется программное регулирование разгона и замедления. Аппарат АЗК имеет механическое соединение с коренным валом. Пульт управления электрически связан с механической частью.
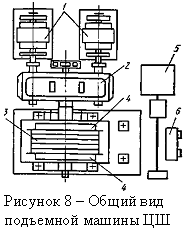
На рисунке 8 представлен общий вид подъемной машины ЦШ. Редуктор 2 и канатоведущий шкив 3 приводятся в действие двумя асинхронными двигателями 1. Крупные подъемные машины ЦШ5х4, ЦШ5х6, ЦШ5х8 имеют привод по системе Г–М. При отклонении каната применяют отклоняющие шкивы. Тормоза 4 устанавливают с противоположных сторон канатоведущего шкива 3. – Каждая пара тормозных колодок, изготовляемых из износоустойчивой пластмассы, имеет свой пружинно-пневматический тормозной привод с грузами. Панель управлений тормозом выделена отдельно. Аппарат АЗК5 имеет механическую связь с главным валом. Пульт управления 6 имеет электрические связи с подъемной машиной.
Канатоведущий шкив сварной конструкции приваривается к ступице, которая насажена на главный вал горячей посадкой. На рабочем ободе канатоведущего шкива для опорной поверхности под канатами прижимами закрепляются специальные колодки из полихлорвинилового пластика, обеспечивающего высокий коэффициент трения и большую износостойкость.
Такой метод повышения коэффициента трения с применением на поверхности трения специальных материалов называют футеровкой.
Клетьевые подъемники (лифты) предназначены для вертикального перемещения людей и грузов в клети 2, движущейся в жестких направляющих 1 (рис. 9, а). Подъемную лебедку 3 с направляющим шкивом 4 устанавливают, как правило, над шахтой. Для уменьшения мощности привода предусматривают противовес 5, перемещающийся в направляющих. Кабина и противовес подвешены на нескольких канатах посредством балансиров. Лебедки клетьевых подъемников применяют двух типов – барабанные и с канатоведущими шкивами, где канаты только охватывают шкив и силой трения поднимают груз. Лебедки с канатоведущими шкивами имеют преимущества перед барабанными: большие компактность и надежность вследствие отсутствия перегрузки канатов и привода при возникновении препятствий на пути клети (заклинивание в направляющих и др.), так как шкив в этом случае будет проскальзывать по канату.
Клетьевые пассажирские подъемники выполняют грузоподъемностью 0,25… 1,25 т со скоростью подъема до 4 м/с. Приводы бывают редукторными и безредукторными. Последние более компактны и применяются на быстроходных подъемниках (v 2 м/с).
В подъемных лебедках применяют червячные редукторы (рис. 9, б), а в последнее время предлагают волновые передачи. Канатоведущие шкивы выполняют чугунными литыми со специальными ручьями.
Наилучшей формой ручья являются канавки с прямолинейным подрезом (рис. 8, в), так как износ ее не влияет на коэффициент сцепления шкива с канатом. При большой высоте подъема применяют подъемники с уравновешивающим канатом, соединяющим снизу кабину с противовесом через направляющий шкив (рис. 9, г).
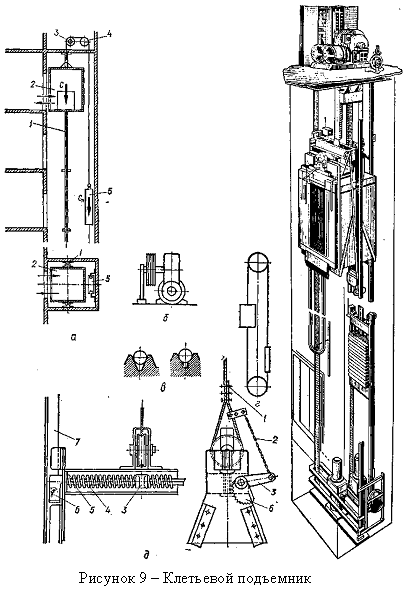
Согласно правилам Госгортехнадзора лифты в целях безопасности оборудованы ловителями, которые при ослаблении или обрыве канатов, а также при превышении предельной скорости опускания автоматически останавливают клеть. По принципу действия они делятся на самозаклинивающиеся, которые обеспечивают мгновенную остановку и применяются для грузовых лифтов, и скользящие – для плавной остановки кабины всех типов лифтов при скорости движения более 0,75 м/с. По конструкции ловители бывают клиновые, эксцентриковые, роликовые.
На рис. 9, д приведена конструкция эксцентрикового ловителя. При обрыве или ослаблении каната 1 гибкая тяга 2, прикрепленная к рычагу 3, ослабляется и под действием пружины 4 поворачивает валик 5. При этом эксцентриковые прижимы 6 захватывают направляющие 7 и удерживают клеть. Аналогичный принцип действия и других типов ловителей.
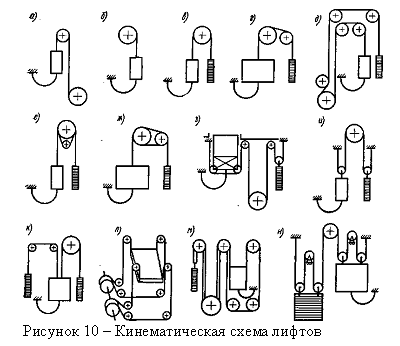
Кинематические схемы. Кинематические схемы дают наиболее общее представление о движении кабины при вращении канатоведущих органов и способах уравновешивания кабин с грузом при помощи противовеса. Вместе с тем кинематические схемы поясняют принципы устройства лифтов разного назначения.
На схемах условно кабины изображены прямоугольниками, противовесы – узкими заштрихованными прямоугольниками. Тяговые органы (канатоведущие шкивы или барабаны) показаны наиболее крупными окружностями, блоки – окружностями меньшего диаметра. Прямые линии, соединяющие перечисленные элементы, условно представляют необходимый комплект канатов. Один канат допускается только для грузового лифта без проводника и грузового малого лифта при наличии у этих лифтов барабанной лебедки. Блоки предназначаются для удерживания и изменения направления канатов, огибающих блоки. Перемещение же канатов осуществляется вращением канатоведущих органов (канатоведущего шкива трения или барабана).
У канатоведущих шкивов канаты вложены в лунки шкива и при вращении последнего канаты перемещаются силой трения. У барабанов концы канатов закрепляются на барабане и огибают его с разных сторон по диаметру: канаты кабины с одной стороны, а канаты противовеса – с другой. При вращении барабана одни канаты наматываются на барабан, а другие разматываются. Если канаты кабины наматываются, то кабина поднимается, а противовес опускается, так как его канаты разматываются, освобождая на барабане место для наматывания канатов, кабины.
Вращение канатоведущих органов то в одну, то в другую сторону осуществляется реверсивным электродвигателем через редуктор.
При канатоведущем шкиве канаты укладываются в лунки шкива, а их концы с одной стороны диаметра прикрепляются к кабине, а с другой – к противовесу. Натяжение канатов от веса кабины с грузом и веса противовеса создает в лунках канатоведущего шкива нормальное давление и трение при вращении шкива, что в конечном счете приводит к необходимому тяговому усилию.
Противовес в кинематических схемах лифта предназначается для уменьшения окружного усилия на канатоведущем органе. Это усилие равно разности натяжений. Уменьшение окружного усилия ведет к соответствующему уменьшению крутящего момента, а следовательно, и к уменьшению необходимой мощности электродвигателя.
Для лифтов с канатоведущей шкивами противовес является также необходимым условием обеспечения тягового усилия, поэтому лифт с канатоведущим шкивом, но без противовеса невозможен. У лифтов с барабанными лебедками отсутствие противовеса приводит только к увеличению необходимой мощности электродвигателя.
Возможные кинематические схемы лифтов приводятся на рисунке 10. На рисунке 10, а показано расположение тягового органа без противовеса, что указывает на необходимость применения подъемного механизма с барабаном. Эту схему используют, если невозможно расположить в шахте противовес и при малой грузоподъемности, когда увеличение мощности не имеет существенного значения. На рисунке 10, б имеет место тот же случай, но только с верхним расположением машинного помещения. На рисунке 10, в и 10, г показана кинематическая схема лифтов с верхним расположением машинного помещения с применением противовесов. В случае 10, в диаметр канатоведущего шкива или барабана равен расстоянию между центрами подвесок кабины и противовеса. В случае же 10, г это расстояние значительно больше диаметра тягового органа, вследствие больших размеров кабины. Для направления канатов по центрам подвесок здесь установлен отклоняющий блок. Угол обхвата канатом тягового органа в случае 10, в равен 180°, а в случае 10, г – меньше. На схеме приводится установка с нижним расположением машинного помещения. По сравнению с позициями 10, в и 10, г легко убедиться, что общая длина канатов при нижней установке машинного помещения по сравнению с верхней установкой примерно в три раза больше. Кроме того, при нижней установке машинного помещения необходимо верхнее дополнительное помещение для системы блоков, ухудшается КПД установки, увеличивается износ канатов вследствие увеличенного числа перегибов канатов и удорожается общая стоимость лифта. Следует также иметь в виду, что установка блочного помещения наверху создает по сравнению с верхней установкой машинного помещения давление на перекрытие почти в два раза большее.
Нижнее расположение машинного помещения, однако, обеспечивает лучшие условия для обслуживания, хотя и не удешевляет его, и несколько улучшает условия звукоизоляции.
По ГОСТ нижнее расположение машинного помещения предусматривается для выжимных тротуарных и малых лифтов.
На рисунке 10, е показана кинематическая схема лифта с многообхватным канатоведущим шкивом и контршкивами, а на рисунке 10, ж дан вариант с многообхватным канатоведущим шкивом, когда контршкив используется одновременно в качестве отклоняющего блока.
Контршкивы увеличивают угол обхвата канатом канатоведущего шкива и их применяют для увеличения тяговой способности и предотвращения скольжения (буксования) каната в лунках канатоведущего шкива при больших нагрузках и ускорениях.
На рисунке 10, з дана кинематическая схема выжимного лифта, где подвешивание кабины и противовеса полиспастное, как на рисунке 10, и. Разница только в том, что у выжимного лифта тяговое усилие действует снизу, кабину «выжимают». У лифта же со схемой и тяговое усилие действует сверху, кабину тянут.
Полиспастное подвешивание кабин и противовеса по рисунке, 10, з и 10, и по сравнению с прямым бесполиспастным подвешиванием по рисунке 10, в и 10, г при одной и той же мощности и одном и том же числе оборотов электродвигателя, одинаковом передаточном числе редуктора и одинаковом диаметре канатоведущего шкива увеличивает в два раза грузоподъемность и во столько же раз уменьшает скорость вертикального подъема подвешенных полиспастное кабин и противовеса. Полиспастное подвешивание по 10, и 10, обладает кратностью полиспаста, равной 2.
Все грузовые лифты общего назначения грузоподъемностью начиная с 1000 до 3200 кг включительно имеют такое подвешивание при скорости 0,5 м/с.
При скорости 0,25 м/с и грузоподъемности 5000 кг применяется полиспастное подвешивание с кратностью полиспаста 4, которое показано на рис. 10, н.
На рисунке, 10, л показана кинематическая схема тротуарного лифта. Грузовая платформа приводится в действие двумя барабанами без противовеса при грузоподъемности 500 кг и скорости 0,18 м/с. Расположение барабанной лебедки нижнее.
Кинематическая схема малого грузового лифта магазинного типа приводится на рисунке 10, м. Малые грузовые лифты общего назначения имеют или верхнее расположение машинного помещения, или нижнее при расположении сбоку шахты. Кинематические схемы этих лифтов соответствуют схемам на рисунке 10, в или 10, д).
2. Основные технические требования при проектировании, установке и эксплуатации лифтов (подъёмников)
1. Техническая характеристика электрического оборудования, электропроводок и их исполнение должны соответствовать параметрам лифта по напряжению и частоте питающей сети, токовым нагрузкам, надежности, а также условиям его эксплуатации, хранения и транспортирования.
2. Напряжение от источника питания должно подаваться в машинное помещение лифта через вводное устройство с ручным приводом, которым должен оборудоваться каждый лифт.
При размещении двух и более лифтов в общем машинном помещении в этом помещение должен быть осуществлен ввод не менее двух питающих линий.
При отсутствии машинного помещения электроснабжение должно быть подано в помещение, где расположено вводное устройство.
Электрооборудование и электроснабжение лифта должны отвечать требованиям «Правил устройства электроустановок».
3. При размещении электрооборудования в разных помещениях должны быть предусмотрены несамовозвратные выключатели для отключения лифта.
4. Вводное устройство может быть рассчитано как на снятие напряжения с лифта под нагрузкой, так и без нагрузки.
При применении вводного устройства, предназначенного для снятия напряжения без нагрузки или с нагрузкой не более 2 A, должен быть предусмотрен дополнительный выключатель силовой цепи и цепи управления, рассчитанный на коммутацию цепей под нагрузкой.
Допускается дополнительно оборудовать вводное устройство приводом для дистанционного отключения (дистанционное включение вводного устройства не допускается); при этом должны быть выполнены следующие условия:
а) вводное устройство должно быть рассчитано на отключение электрических цепей под нагрузкой;
б) выключатель для дистанционного отключения должен быть несамовозвратным;
в) около каждого выключателя для дистанционного отключения вводного устройства должна быть предусмотрена сигнализация о его положении: «Включено», «Отключено»;
г) должна быть исключена возможность дистанционного отключения при нахождении в кабине людей;
д) доступ посторонних лиц к выключателю дистанционного отключения должен быть исключен.
5. В качестве вводного устройства может быть использован автоматический выключатель, если он оборудован ручным приводом; при этом его включение должно быть возможно только вручную.
6. Вводное устройство должно отключать все питающие фазы и полностью снимать напряжение с электрических цепей, за исключением цепей:
освещения шахты, машинного и блочного помещений; освещения кабины; вентиляции кабины; вызова обслуживающего персонала из кабины; двусторонней переговорной связи из кабины; ремонтной связи.
При этом для отключения указанных цепей должны быть предусмотрены отдельные выключатели, расположенные в машинном помещении, а при его отсутствии – в запираемом шкафу. Выключатель освещения блочного помещения должен быть расположен в блочном помещении.
Цепи освещения кабины и ее вентиляции, вызова обслуживающего персонала из кабины, двусторонней переговорной связи из кабины и ремонтной связи допускается подключать после вводного устройства, если предусмотрены дополнительные специальные выключатели для отключения силовой цепи и цепи управления. При этом вводное устройство не должно быть оборудовано приводом для дистанционного отключения, и в качестве вводного устройства не должен применяться автоматический выключатель.
Цепи вспомогательного освещения кабины, вызова обслуживающего персонала из кабины, двусторонней переговорной связи из кабины и ремонтной связи могут подключаться к другим электрическим сетям здания или сооружения.
7. На одной из посадочных (погрузочных) площадок допускается установка выключателя для дистанционного отключения (включения) силовой цепи и (или) цепей управления при включенном вводном устройстве; при этом должны быть предусмотрены мероприятия, исключающие возможность отключения электрических цепей при нахождении в кабине людей. Доступ посторонних лиц к этому выключателю должен быть исключен.
8. Напряжение силовых электрических цепей должно быть:
не более 660 В в машинном помещении;
не более 415 В переменного тока частотой 50 Гц, 440 В переменного тока частотой
60 Гц и 460 В постоянного (выпрямленного) тока – в кабине, шахте и на посадочных (погрузочных) площадках, а также на площадках, где установлено электрооборудование при отсутствии машинного помещения. Напряжение цепей управления, освещения и сигнализации должно быть не более 254 В.
9. Напряжение цепи переносных ламп должно быть не более 42 В. Применение автотрансформаторов или потенциометров с целью понижения напряжения для этой цели не допускается.
10. Для питания цепей управления, освещения и сигнализации допускается использование фазы и нулевого провода сети с глухозаземленной нейтралью источника тока (включение на фазное напряжение). При использовании фазы и нулевого провода между ними должно быть не более 254 В.
11. При включении на фазное напряжение цепей, имеющих выключатели безопасности, один вывод обмоток электромагнитных аппаратов (контакторов, пускателей, реле и т.п.) в этих цепях должен быть наглухо соединен с нулевым проводом.
12. При питании переменным током от понижающего трансформатора цепей, имеющих выключатели безопасности, один вывод вторичной обмотки трансформатора должен быть заземлен. Один вывод обмотки электромагнитных аппаратов в этих цепях должен быть наглухо присоединен к заземленному выводу трансформатора.
13. При питании от понижающего трансформатора через выпрямительное устройство цепей управления постоянного тока, имеющих выключатели безопасности, один из полюсов этого устройства на стороне выпрямленного напряжения должен быть заземлен. При этом один вывод обмотки электромагнитных аппаратов в цепи управления должен быть наглухо подключен к заземленному полюсу. Вторичную обмотку понижающего трансформатора в этом случае заземлять не допускается.
14. Защитное заземление или зануление должны отвечать требованиям «Правил устройства электроустановок».
15. Установка в заземляющих (зануляющих) проводниках предохранителей, контактов и других размыкающих элементов, в том числе бесконтактных, не допускается.
16. Токоведущие части выключателей с ручным приводом: вводного устройства, выключателей, устанавливаемых в приямке, блочном и машинном помещениях, выключателей дистанционного включения (отключения) электрических цепей должны быть защищены от случайного прикосновения, если напряжение на них может быть более 42 В переменного тока или более 60 В постоянного тока. Положение этих выключателей должно быть обозначено соответствующими символами или надписями: «Вкл.»; «Откл.».
3. Выбор рода тока и типа электропривода
Электропривод лифта должен удовлетворять следующим требованиям:
а) замыкание токоведущих частей электрического устройства привода тормоза (электромагнита и т.п.) на корпус не должно вызывать самопроизвольное включение этого привода и снятие механического тормоза при остановленном лифте и не должно нарушать наложение механического тормоза после отключения электродвигателя;
б) у лифта с номинальной скоростью более 0,71 м/с должна быть обеспечена возможность движения кабины с пониженной скоростью не более 0,4 м/с с учетом требования п. 6.3.33.
Электропривод переменного тока при питании электродвигателя непосредственно от сети должен удовлетворять следующим требованиям:
а) снятие механического тормоза должно происходить одновременно с включением электродвигателя или после его включения;
б) отключение электродвигателя должно сопровождаться наложением механического тормоза;
в) цепь главного тока электродвигателя должна прерываться двумя независимыми электромагнитными аппаратами, один из которых может быть концевым выключателем.
«Правила устройства электроустановок» рекомендуют начинать процесс выбора рода тока с двигателей переменного тока. Для привода механизмов, не требующих регулирования частоты вращения, независимо от их мощности, рекомендуется применять электродвигатели синхронные или асинхронные с короткозамкнутым ротором.
Для нерегулируемого привода выбор типа двигателя прост. Двигатели переменного тока проще по конструкции, стоимость их ниже, обслуживание тоже требует меньших затрат. При повторно-кратковременном режиме работы с частыми пусками и торможениями рационально использовать двигатели повышенного скольжения.
Электрический привод лифта состоит из электродвигателя, комплекта аппаратуры для управления и промежуточной передачи от двигателя к рабочему механизму. Применяют электродвигатели кранового и металлургического типов, а также общего назначения. Крановые электродвигатели имеют высокую механическую прочность, перегрузочную способность и меньший момент инерции ротора за счет малого его диаметра. В каталогах указываются номинальные данные двигателей при ПВ, равном 15, 25, 40, 60 и 100%.
Выбирается электропривод: металлургический АД с КЗ ротором. Так как для грузового лифта не требуется регулирование скорости в больших пределах, режим работы повторно-кратковременный (S3).
4. Расчет мощности и выбор приводного электродвигателя; определение передаточного числа, выбор редуктора
4.1 Выбор двигателя
Выбор двигателя:
Фактическая продолжительность включения:
Время работы: tp = 80 с
![]()
Исходя из характера работы двигателя и фактической продолжительности включения, режим работы двигателя S5 – периодический повторно-кратковременный режим с влиянием пусковых процессов и электрическим торможением.
Продолжительность включений выбрана меньше полученного, следовательно необходимо проверить выбранный двигатель по нагреву.
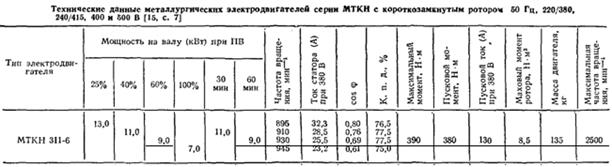
Исходя из Р и режима работы электропривода, выбираем двигатель MTKH 311–6, U=380В, f=50 Гц, P=9 кВт, защищенный с независимой вентиляцией (продуваемый), режим ПВ = 60%.
Таблица 4 – Паспортные данные двигателя:
4.2 Выбор редуктора
Для этого определяется скорость подъёма груза:
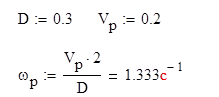
Vp – скорость подъема клети, м/с;
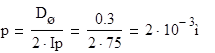
D – диаметр канатоведущего шкива, м.
Передаточное число редуктора определяется по номинальной скорости вращения выбранного двигателя и основной скорости движения исполнительного органа, по формуле:
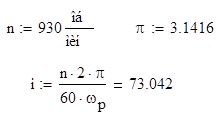
По рассчитанным данным наиболее выбирается редуктор:
Тип РГЛ200, i=75 (перед. число), =0.95 (К.П.Д).
5. Расчёт приведенных статических моментов (моментов сопротивлений), моментов инерции и коэффициента жёсткости системы

r=Dш /2·ip , – радиус приведения поступательно движущихся масс к скорости wш .
Будем считать, что при подъеме кабины лифта w0 и wш 0. Статический момент, преодолеваемый электродвигателем при подъеме кабины, если mкл mпв .
Mстат =((mкл + mгр ) – mпв ) gr/hр iр ,

Статический момент, преодолеваемый электродвигателем при подъеме кабины равен: Mcтат = 0.688 Н·м.
Рассчитываем случай подъёма кабины лифта вверх (в данном случае кабина лифта загружена). Масса груза равна 5000 кг.
Приводим грузы к валу двигателя.
Моменты инерции клети, груза и противовеса приведенные к скорости вращения вала двигателя вычисляются по формулам:

Определим суммарный момент инерции:
Определим моменты при подъёме:
Кабина лифта Противовес
![]()
Момент потерь в редукторе определяется текущими значениями нагрузки передачи. Его можно приближенно принять постоянным и равным моменту, соответствующему статическому режиму.
Момент сопротивления первой и второй масс соответственно равны:
Определим суммарный момент инерции привода с учетом одномассовости системы:
![]()
Определим коэффициент жёсткости:
Clin – линейная жёсткость ![]() Н/м2
Н/м2
Определим жёсткость связи между первой и второй массами:
Для этого используется высота подъёма кабины h. (h=6м).
![]()

Данной кинематической схеме электропривода лифта соответствует структурная схема:
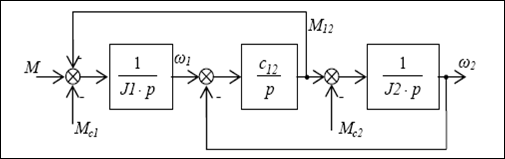
Рисунок 12 – Структурная схема электропривода лифта
Система уравнений двухмассовой системы (стр. 55 Ключев)
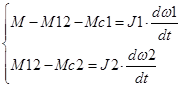
Обозначив d/dt=p, а ![]() запишем:
запишем:
![]()
![]()
Частота собственных колебаний двухмассовой упругой системы.

Возможность упрощения модели механической части электропривода тоесть представление последней в виде одномассовой (жесткой) системы можно оценить по значению отношения:
![]()
Поскольку значение 12 незначительно превышает единицу (значение J2 составляет около 15% от значения J1 ), то можем считать J2 J1 . В таком случае можно представить механическую часть электропривода жестким приведенным звеном (рис13.), суммирующий момент инерции которого равен:
![]()
Суммирующий момент нагрузки при движении на подъём равен:
![]()
Динамический момент равен:
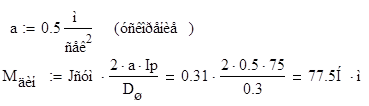
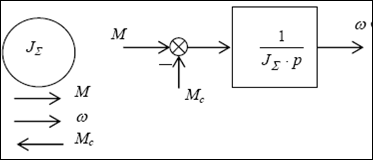
Рисунок 13 – Схема одномассовой системы
Уравнение движения одномассовой системы имеет вид:
М-Мс=Jсум·p·. (т.е Макт -Мсум =Jсум ·p·).
Для построения механической характеристики нагрузки Мс() в данном положении кабины лифта и противовеса нужно определить момент нагрузки предположении, что осуществляется опускание загруженной кабины лифта. В этом случае потенциальные (активные) моменты М1 и М2 сохраняют свое направление, а реактивный момент потерь Мр изменяет его на противоположное. Следовательно, при изменении знака скорости момент нагрузки изменяет свое направление:
Mc = М1 + (-М2 )+ (-Мр ) = 245.25 – 196.2 – 2.582 = 46.468 Н·м.
Механическая характеристика нагрузки показана на рис 14. При опускании кабины с грузом двигатель работает в тормозном режиме. Тормозной момент М= Mc совместно с моментом потерь Мр уравновешивают движущий активный момент
Макт = М1 + (- М2 ) = 245.25 – 196.2 =49.05Н·м.
обусловленный результирующим усилием на шкиве от разности масс загруженной кабины и противовеса.
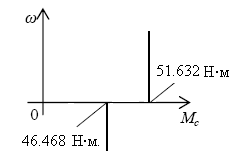
Рисунок 14 – Механическая характеристика нагрузки.
6. Предварительная проверка двигателя по нагреву и производительности
Определяем номинальную угловую скорость вращения ротора двигателя.
![]()
![]()
Определяем номинальный момент.
Определяем приведенное ускорение.
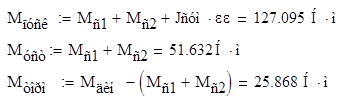
Определяем пусковой, установившийся и тормозной моменты:
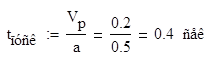
Определяем время пуска:
Определяем время торможения
Время торможения равняется времени пуска
![]()
Путь, проходимый за время пуска (торможения) рабочей машиной (стр. 11, Драчев)

Время установившегося режима движения со средней скоростью.
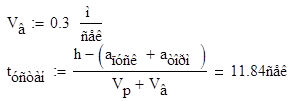
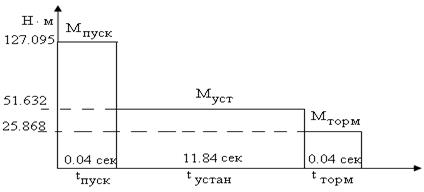
Рисунок 15 – Нагрузочная диаграмма при подъеме груза
Коэффициент ухудшения теплопроводности: =0.5
При пуске и торможении скорость изменяется от 0 до ном значит средняя скорость ср =ном /2, ср =ном /2=97,39/2=48,695 рад/сек.
Рассчитываем мощности на разных участках диаграммы.

Для проверки двигателей по нагреву применяются методы эквивалентного момента, эквивалентного тока и эквивалентной мощности.
Проверка выбранного двигателя методом эквивалентной мощности.
Эквивалентная мощность:

Мощность выбранного двигателя (9 кВт) больше рассчитанного, поэтому данный двигатель проходит по нагреву и его можно использовать в данной системе.
Сравнение пускового и максимального моментов с рассчитанными значениями.
Из расчетов можно сделать вывод, что двигатель проходит по всем параметрам.
Расчеты производились при подъеме груза, а значит если данный двигатель сможет поднять груз, то он сможет его и опустить. Данный вывод можно сделать исходя из того, что при поднятии груза mg действует против направления груза, а при опускании – по направлению. Следовательно для опускания груза понадобится меньше мощности.
7. Допустимая частота пусков
Начальное скольжение.
![]()
Номинальное скольжение Sн и критическое скольжение Sк двигателя.
Номинальное скольжение:

Критическое скольжение:
![]()
![]()
Определяем критическую угловую скорость вращения ротора двигателя:
![]()
Номинальное напряжение, конструктивный коэффициент, мощность двигателя:
![]()
Механические потери:
Коэффициент вязкого трения:

Сопротивление ротора:
Сопротивление статора:
Индуктивность статора и ротора:
Индуктивность статора и индуктивность ротора должны быть приблизительно одинаковы.
![]()

![]()
Индуктивность рассеивания статора и индуктивность рассеивания ротора:

![]()
Взаимоиндукция:
![]()
Проверка конструктивного коэффициента:
Можно принять что С1 (1.068) совпадает с выбранным ранее с1 (1.066), (небольшая разница в полученных данных произошла в результате округлений данных в расчётах) , значит конструктивный коэффициент выбран правильно.
Приведенное активное сопротивление ротора:
Потери энергии в статоре:

Потери энергии при нагрузке:
![]()
Средний момент:

Потери энергии при пуске и торможении (Дж):

Потери мощности в номинальном режиме:
Допустимая частота включений:

Допустимая частота включений (по условию) Z =30, а допустимая частота включений двигателя (рассчитанная Z =530) значит по частоте включений двигатель вполне подходит.
8. Построение механической характеристики, используя формулу Клосса:
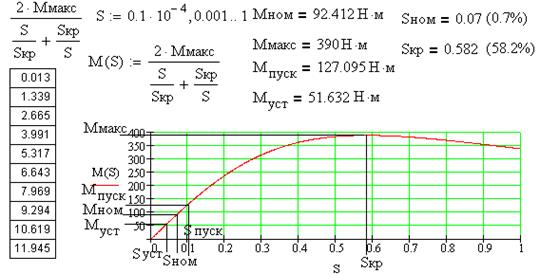
Для удобства производится также построение механической характеристики в логарифмическом масштабе.
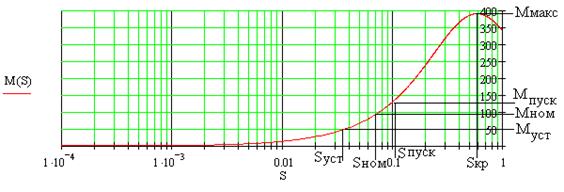
Рисунок 16 – Механическая характеристика двигателя
Графическим способом можно найти скольжение при пусковом и установившемся моментах (что и показано на графиках). Sпуск =0,11 (11%), Sуст =0,035 (3,5%).
Построение характеристики изменения скорости при изменении момента сопротивления на валу двигателя
– жесткость механической характеристики электропривода.
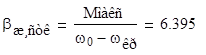
Линеаризированная механическая характеристика асинхронного двигателя.

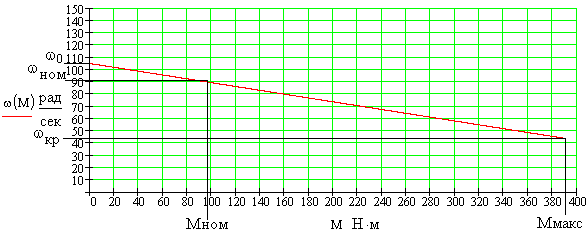
Рисунок 17 – Линеаризированная механическая характеристика
9. Построение переходных процессов
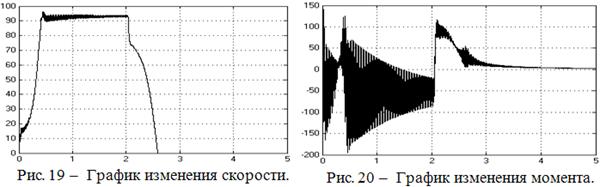
Все полученные в ходе проектирования данные вводятся в виртуальную электронную лабораторию (математический пакет) MATLAB, и производится построение переходных процессов.
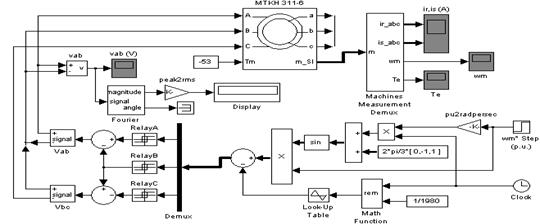
Рисунок 18 – Структурная схема ЭП
Все математические вычисления в данном курсовом проекте производились с помощью компьютерной программы (математического пакета) Mathcad 2000 Professional, а моделирование в виртуальной(компьютерной) электронной лаборатории (математическом пакете) MATLAB.
Литература
1. Львов А.П. Справочник электромонтёра. – Киев: Вища школа, Главное издательство, 1980, – 376 стр.
2. П.С. Сергеев Проектирование электрических машин. Издательство «Энергия», 1970 г.
3. М.М. Кацман. Проектирование электрических машин. М. Энергоатомиздат, 1984 г.
4. Ключев В.И.: «Теория электропривода», Москва, Энергоатомиздат, 1985 г.
5. Герман-Галкин С.Г.: «Компьютерное моделирование полупроводниковых систем в MatLab 6.0», Санкт-Петербург, Корона Принт, 2001 г.
6. Иванченко Ф.К.: «Конструкция и расчет подъемно-транспортных машин», Киев, Вища Школа, 1983 г.
7. Драчев Г.И.: «Теория электропривода», Челябинск, ЮУрГУиздат, 2002 г.
8. Борцов Ю. А, Соколовский Г.Г. Автоматизированный электропривод с упругими связями. – СПб.: Энергоатомиздат, 1992.