Разработка микропроцессорной системы контроля
СОДЕРЖАНИЕ: СОДЕРЖАНИЕ ПОСТАНОВКА ЗАДАЧИ И ИСХОДНЫЕ ДАННЫЕ Описание назначения и устройства микропроцессорной системы контроля Описание функциональной схемы микропроцессорной системы контроляСОДЕРЖАНИЕ
ПОСТАНОВКА ЗАДАЧИ И ИСХОДНЫЕ ДАННЫЕ
1 Описание назначения и устройства микропроцессорной системы контроля
2 Описание функциональной схемы микропроцессорной системы контроля
3 Расчет статической характеристики канала измерения
4 Разработка алгоритма функционирования микропроцессорной системы контроля
5 Разработка программы для микропроцессорной системы контроля
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
ПОСТАНОВКА ЗАДАЧИ И ИСХОДНЫЕ ДАННЫЕ
Разрабатываемая МП система должна осуществлять контроль концентрации газа и обеспечивать:
· индикацию значений концентрации и режима работы системы
· сигнализацию превышения предельно допустимого значения концентрации
· автоматическое отключение (блокировку) подачи газа при превышении концентрации в течение заданного времени
· сброс блокировки и подачу газа по команде с клавиатуры при допустимом значении концентрации
![]()
![]() – предельное значение концентрации;
– предельное значение концентрации;
#АЦП = 0 – номер входа АЦП;
![]()
![]() – задержка срабатывания блокировки;
– задержка срабатывания блокировки;
# OUT 1 = Р1.1 – номер линии для управления сигнализацией;
# OUT 2 = Р1.2 – номер линии для управления блокировкой;
1 + *– комбинация нажатия кнопок для сброса блокировки.
1 ОПИСАНИЕ НАЗНАЧЕНИЯ И УСТРОЙСТВА МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ КОНТРОЛЯ
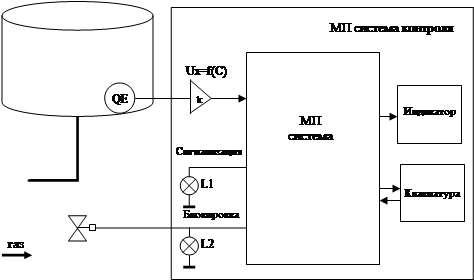
Микропроцессорная система контроля служит для индикации значения концентрации и режима работы системы, сигнализации превышения предельно допустимого значения концентрации, автоматического отключения (блокировки) подачи газа при превышении концентрации в течение заданного времени, сброса блокировки и подачи газа по команде с клавиатуры при допустимом значении концентрации.
Микропроцессорная система контроля состоит из микропроцессорной системы, клавиатуры, индикатора, двух сигнализирующих лампочек (L1 «сигнализация», L2 «блокировка») и усилителя.
Термокондуктометрический газоанализатор соединен через усилитель с первым входом микропроцессорной системы. Сигналом с клавиатуры, поступающим на второй вход микропроцессорной системы, можно осуществлять включение или выключение электромагнитного клапана и сброс блокировки.
Первый выход микропроцессорной системы подключен к сигнализирующей лампочке L1 «сигнализация». Второй выход микропроцессорной системы соединен с сигнализирующей лампочкой L2 «блокировка» и электромагнитным клапаном, служащим для подачи газа в аппарат. Третий и четвертый выходы микропроцессорной системы соединены с клавиатурой и индикатором.
2 ОПИСАНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ КОНТРОЛЯ
Электромагнитный клапан KLможет находиться в двух состояниях: 0 – клапан закрыт и 1 – клапан открыт.
Сигнализирующие лампочки L1 «сигнализация», L2 «блокировка» также могут находиться только в двух состояниях: 0 – лампочка не горит, 1 – лампочка горит.
Сигналом с клавиатуры, поступающим на второй вход микропроцессорной системы, можно осуществлять подачу газа клавишей «2», переход в режим «ожидание» клавишей «1» и снятие блокировки клавишами 1 + *.
Микропроцессорная система может работать в трех режимах:
regim 1 – ожидание сигнала «рабочий режим» при закрытом электромагнитном клапане;
regim2 – подача газа в аппарат до заданного значения концентрации с переходом после превышения заданного значения концентрации в течение заданного времени в regim3 (блокировка) с возможностью подачи сигнала «ожидание» с клавиатуры;
regim3 – автоматическая блокировка подачи газа в аппарат при превышении заданного значения концентрации в течение заданного времени с возможностью перехода в рабочий режим при нажатии клавиш 1 + * и при допустимом значении концентрации.
3 РАСЧЕТ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ КАНАЛА ИЗМЕРЕНИЯ
Напряжение на выходе термокондуктометрического газоанализатора:
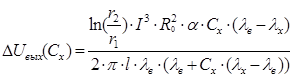 ,
,
где ![]()
![]() - концентрация монооксида углерода;
- концентрация монооксида углерода;
![]()
![]() - радиус нити;
- радиус нити;
![]()
![]() - радиус камеры детектора;
- радиус камеры детектора;
![]()
![]() - ток нити;
- ток нити;
![]()
![]() - длина нити;
- длина нити;
![]()
![]() - сопротивление нити;
- сопротивление нити;
![]()
![]() - температурный коэффициент сопротивления платиновой проволоки;
- температурный коэффициент сопротивления платиновой проволоки;
![]()
![]() - теплопроводность воздуха;
- теплопроводность воздуха;
![]()
![]() - теплопроводность монооксида углерода.
- теплопроводность монооксида углерода.
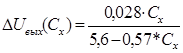
Статическая характеристика вторичного преобразователя имеет вид:
![]() ,
,
где ![]() - коэффициент усиления;
- коэффициент усиления; ![]() - выходной сигнал усилителя.
- выходной сигнал усилителя.
 ;
; ![]()
Статическая характеристика канала измерения будет выглядеть следующим образом:
![]()
4 РАЗРАБОТКА АЛГОРИТМА ФУНКЦИОНИРОВАНИЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ КОНТРОЛЯ
На рисунке 1 представлена блок-схема алгоритма функционирования микропроцессорной системы контроля.
В блоке 1 производится настройка индикатора для отображения информации и инициализация таймера/счетчика 0.
В блоке 2 задается regim 1 и устанавливается предельное значение концентрации 0,2.
В блоке 3 производится проверка, является ли regim 1 текущим режимом. При невыполнении этого условия программа переходит к блоку 8.
В блоке 4 производится закрытие электромагнитного клапана.
В блоке 5 осуществляется отключение сигнализирующих лампочек.
В блоке 6 производится проверка, нажата ли клавиша «2». При выполнении этого условия программа переходит к блоку 7, где устанавливается regim2, в противном случае – к блоку 3.
В блоке 8 производится проверка, является ли regim2 текущим режимом. При невыполнении этого условия программа переходит к блоку 18.
В блоке 9 выполняется подпрограмма индикации С(х).
В блоке 10 производится открытие электромагнитного клапана и присваивается начальное значение переменной time=0.
В блоке 12 производится проверка, нажата ли клавиша «1». При выполнении этого условия программа переходит к блоку 13, где устанавливается regim 1.
В блоке 14 выполняется проверка превышения концентрации при regim 2. При невыполнении этого условия программа переходит к блоку 8.
В блоке 15 производится включение сигнализирующей лампочки L1.
В блоке 16 выполняется проверка превышения заданного времени. При не выполнении этого условия программа переходит к блоку 14, в противном случае – к блоку 17, где устанавливается regim 3.
В блоке 18 производится проверка, является ли regim3 текущим режимом. При невыполнении этого условия программа переходит к блоку 3.
В блоке 19 производится закрытие электромагнитного клапана и выполняется подпрограмма индикации С(х).
В блоке 20 производится проверка превышения предельного значения концентрации. При выполнении этого условия программа переходит к блоку 21, в котором включает сигнализирующие лампочки L1 и L2, иначе – к блоку 22, где включает сигнализирующую лампочку L2 и выключает L1.
В блоке 23 производится проверка нажатия клавиш 1 + * при допустимом значении концентрации. При невыполнении этого условия программа переходит к блоку 18, иначе – к блоку 24, в котором устанавливается regim 2 .
На рисунке 2 представлена блок-схема алгоритма опроса клавиатуры.
В блоке 1 инициализируется переменная scan для опроса первого столбца клавиатуры.
В блоке 2 производится проверка окончания сканирования последнего столбца. Если условие выполняется, то программа переходит к блоку 4, где осуществляется выход из подпрограммы.. Если нет, то программа переходит к блоку 3.
В блоке 3 производится вывод значения переменной scan в порт P4 для сканирования клавиатуры.
В блоке 5 осуществляется ввод с порта P4 и присвоение этого значения переменной key.
В блоке 6 выполняется проверка факта нажатия кнопки в опрашиваемом столбце.
При обнаружении нажатой кнопки выполняется блок 7, в котором производится возвращение в основную программу значения переменной key, в противном случае – блок 8.
Блок 8 осуществляет модификацию переменной scan путем сдвига влево для сканирования следующего столбца.
В блоке 9 производится инкрементация переменной scan. Далее программа переходит к блоку 2.
На рисунке 3 представлена блок-схема алгоритма индикации С(х).
В блоке 1 инициализируется переменная chan.
В блоке 2 производится проверка равенства бита ADCS=1 регистра ADCON. Если условие выполняется, то АЦП не готов к выполнению новых преобразований и программа возвращается к блоку 2. Если нет, то программа переходит к блоку 3.
В блоке 3 устанавливаются биты ADR0-ADR2 для выбора канала АЦП.
В блоке 4 производится проверка равенства бита ADCI=1 регистра ADCON. Если условие не выполняется, то программа переходит к блоку 6, где осуществляется установление бита ADCSв 0, с последующим переходом к блоку 11. Если да, то программа переходит к блоку 5.
В блоке 5 выполняется присвоение переменной nxфакта нажатия кнопки в опрашиваемом столбце.
В блоке 7 осуществляется расчет напряжения Ux.
В блоке 8 осуществляется расчет текущего значения концентрации Сх.
В блоке 9 производится индикация значения концентрации Сх.
В блоке 10 выполняется сброс бита ADCIв 0.
В блоке 11 возвращается в основную программу значения переменной Сх.
На рисунке 4 представлена блок-схема алгоритма обработки прерывания.
В блоке 1 инкрементируется переменная time.
В блоке 2 производится установка старшего байта таймера 0.
В блоке 3 устанавливается младший байт таймер
5 РАЗРАБОТКА ПРОГРАММЫ ДЛЯ МИКРОПРОЦЕССОРНОЙ СИСТЕМЫ КОНТРОЛЯ
HELLO.C
Copyright 1995-1999 Keil Software, Inc.
#include REG552.H
#include stdio1.h /* prototype declarations for I/O functions */
unsigned char xdata wr_ir _at_ 0x7ff0 ;
unsigned char xdata rd_ir _at_ 0x7ff1 ;
unsigned char xdata wr_dr _at_ 0x7ff2 ;
unsigned char xdata rd_dr _at_ 0x7ff3 ;
unsigned char scan;
unsigned char key;
char chan=0x00;
float Ux,Cx, C0=0.2;
int nx, time=0, regim=1;
bit KL=0;
void wrc (unsigned char ir) {
unsigned char bf;
do{bf=rd_ir0x80;}
while (bf!=0);
wr_ir =ir; }
unsigned char rdc (void) {
unsigned char bf;
do{bf=rd_ir0x80;}
while (bf!=0);
return rd_ir;}
void wrd (unsigned char dr) {
unsigned char bf;
do{bf=rd_ir0x80;}
while (bf!=0);
wr_dr =dr; }
unsigned char rdd (void) {
unsigned char bf;
do{bf=rd_ir0x80;}
while (bf!=0);
returnrd_dr;}
// вывод одного символа
void putchar(unsigned char cm) {
if((cm 0xC0) == 0xC0)
cm = tcod[cm 0x3F];
wrd (cm);}
// подпрограмма вывода строки по-русски
void puts ( const unsigned char *str ) {
unsigned char i = 0;
while(str[i] != 0) {putchar(str[i]); i++;}}
The main C function. Program execution starts
here after stack initialization.
unsigned char klav(void) {
scan=0xFE;
while (scan!=0xF7){
P4=scan;
key=P4;
if ((key0x78)!=0x78)
{return key;}
scan=scan1;
scan++;
return 0;}
float C (void){
chan=0x00;
ADCON=(ADCON0xF8)|(chan0x07);
while (ADCON0x08);
if (ADCON0x10){nx=(ADCH2)|(ADCON6);
Ux=2.5*nx/1024;
Cx=Ux*5.6/(18.56+0.57*Ux);
if (Cx1) Cx=1;
if (Cx0) Cx=0;
wrc(0xC0);
printf(Cx=%02.3f,Cx);
ADCON=ADCON0xEF;}
else
ADCON=ADCON|0x08;
return Cx;}
void INT_1(void) interrupt 1 {time++; TH0=0x4С;TL0=0x50;}
void main (void) {
// инициализация HD44780
wrc (0x38); //2 строки, 5*8 точек,
wrc (0x06); // вывод слева-направо
wrc (0x01); // очистка
wrc (0x0c); // экран вкл., курсор выкл.
IEN0=0x82;
TMOD=0x01;
TR0=1;
while (1) {wrc(0x80);
printf(измерение концентрации:);
while (regim==1) {wrc(0xCB); printf(ожидание ); KL=0; P1=0x00;
if (klav()==0xF5){regim=2;}
while (regim==2) {wrc(0xCB); printf(рабочийрежим ); C();KL=1; time=0; P1=0x00;
if (klav()==0xF6) {regim=1;}
while ((C()C0)(regim==2)) {P1=0x02;
wrc(0xCB);
printf(cигнализация);
if (time200) {regim=3;}
while (regim==3) {wrc(0xCB); printf(блокировка); KL=0;
if (C()C0) {P1=0x06;}
else {P1=0x04;}
if ((klav()==0xB4)(C()C0)){regim=2;}
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Архитектура микроконтроллеров семейства MCS-51: конспект лекций/ Бояринов А.Е., Дьяков И.А. Тамбов: Изд-во Тамб. гос. тех. ун-та, 2005. 64с.
2. Микропроцессоры в системах контроля: методические указания/ Бояринов А.Е. Тамбов: Изд-во Тамб. гос. тех. ун-та, 2005. 44с.