Режимы работы асинхронных двигателей
СОДЕРЖАНИЕ: Общие сведения об асинхронных машинах. Общие сведения о режимах работы асинхронного двигателя. Аналитическое и графическое определение режимов работы асинхронной машины.Реферат выполнил ст-т 6-ого куса, 12 гр., спец. 1801, Полукаров А.Н.
Самарский Государственный Технический Университет
Кафедра «Электромеханика и нетрадиционная энергетика»
Самара, 2006
1. Введение.
Общие сведения об асинхронных машинах.
Асинхронной машиной называется двухобмоточная электрическая машина переменного тока, у которой только одна обмотка (первичная) получает питание от электрической сети с постоянной частотой 1, а вторая обмотка (вторичная) замыкается накоротко или на электрические сопротивления. Токи во вторичной обмотке появляются в результате электромагнитной индукции. Их частота 2 является функцией угловой скорости ротора , которая в свою очередь зависит от вращающего момента, приложенного к валу.
Наибольшее распространение получили асинхронные машины с трехфазной симметричной разноименнополюсной обмоткой на статоре, питаемой от сети переменного тока, и с трехфазной или многофазной симметричной разноименнополюсной обмоткой на роторе.
Машины такого исполнения называют просто «асинхронными машинами», в то время как асинхронные машины иных исполнений относятся к «специальным асинхронным машинам».
Асинхронные машины используются в основном как двигатели; в качестве генераторов они применяются крайне редко.
Асинхронный двигатель является наиболее распространенным типом двигателя переменного тока.
Разноименнополюсная обмотка ротора асинхронного двигателя может быть короткозамкнутой (беличья клетка) или фазной (присоединяется к контактным кольцам). Наибольшее распространение имеют дешевые в производстве и надежные в эксплуатации двигатели с короткозамкнутой обмоткой на роторе, или короткозамкнутые двигатели. Эти двигатели обладают жесткой механической характеристикой (при изменении нагрузки от холостого хода до номинальной их частота вращения уменьшается всего на 2—5%).
Двигатели с короткозамкнутой обмоткой на роторе обладают также довольно высоким начальным пусковым вращающим моментом. Их основные недостатки: трудность осуществления плавного регулирования частоты вращения в широких пределах; потребление больших токов из сети при пуске (в 5—7 раз превышающих поминальный ток).
Двигатели с фазной обмоткой на роторе или двигатели с контактными кольцами избавлены от этих недостатков ценой усложнения конструкции ротора, что приводит к их заметному удорожанию по сравнению с короткозамкнутыми двигателями (примерно в 1,5 раза). Поэтому двигатели с контактными кольцами на роторе находят применение лишь при тяжелых условиях пуска, а также при необходимости плавного регулирования частоты вращения.
Двигатели с контактными кольцами иногда применяют в каскаде с другими машинами. Каскадные соединения асинхронной машины позволяют плавно регулировать частоту вращения в широком диапазоне при высоком коэффициенте мощности, однако из-за значительной стоимости не имеют сколько-нибудь заметного распространения.
В двигателях с контактными кольцами выводные концы обмотки ротора, фазы которой соединяются обычно в звезду, присоединяются к трем контактным кольцам. С помощью щеток, соприкасающихся с кольцами, в цепь обмотки ротора можно вводить добавочное сопротивление или дополнительную ЭДС для изменения пусковых или рабочих свойств машины; щетки позволяют также замкнуть обмотку накоротко.
В большинстве случаев добавочное сопротивление вводится в обмотку ротора только при пуске двигателя, что приводит к увеличению пускового момента и уменьшению пусковых токов и облегчает пуск двигателя. При работе асинхронного двигателя пусковой реостат должен быть полностью выведен, а обмотка ротора замкнута накоротко. Иногда асинхронные двигатели снабжаются специальным устройством, которое позволяет после завершения пуска замкнуть между собой контактные кольца и приподнять щетки. В таких двигателях удается повысить КПД за счет исключения потерь от трения колец о щетки и электрических потерь в переходном контакте щеток.
Выпускаемые заводами асинхронные двигатели предназначаются для работы в определенных условиях с определенными техническими данными, называемыми номинальными. К числу номинальных данных асинхронных двигателей, которые указываются в заводской табличке машины, укрепленной на ее корпусе, относятся:
механическая мощность, развиваемая двигателем, Рн = P2н;
частота сети f1;
линейное напряжение статора U1лн
линейный ток статора I1лн;
частота вращения ротора nн;
коэффициент мощности cos 1н;
коэффициент полезного действия н.
Если у трехфазной обмотки статора выведены начала и концы фаз и она может быть включена в звезду или треугольник, то ука-зываются линейные напряжения и токи для каждого из возможных соединений (/).
Кроме того, для двигателя с контактными кольцами приводится напряжение на разомкнутых кольцах при неподвижном роторе и линейный ток ротора в номинальном режиме.
Номинальные данные асинхронных двигателей варьируются в очень широких пределах. Номинальная мощность — от долей ватта до десятков тысяч киловатт. Номинальная синхронная частота вращения п1н = 60 f1/р при частоте сети 50 Гц от 3000 до 500 об/мин и менее в особых случаях; при повышенных частотах — до 100 000 об/мин и более (номинальная частота вращения ротора обычно на 2—5% меньше синхронной; в микродвигателях — на 5—20%). Номинальное напряжение от 24 В до 10 кВ (большие значения при больших мощностях).
Номинальный КПД асинхронных двигателей возрастает с ростом их мощности и частоты вращения; при мощности более 0,5 кВт он составляет 0,65—0,95, в микродвигателях 0,2—0,65.
Номинальный коэффициент мощности асинхронных двигателей, равный отношению активной мощности к полной мощности, потребляемой из сети,
также возрастает с ростом мощности и частоты вращения двигателей; при мощности более 1 кВт он составляет 0,7—0,9; в микродвигателях 0,3—0,7.
Общие сведения о режимах работы асинхронного двигателя.
В двигательном режиме разница частот вращения ротора и поля статора в большинстве случаев невелика и составляет лишь несколько процентов. Поэтому частоту вращения ротора оценивают не в абсолютных единицах (об/мин или об/с), а в относительных, вводя понятие скольжения:
s = (пс - п)/пс,
где пс — частота вращения поля (синхронная частота вращения); п — частота вращения ротора.
Скольжение выражается либо в относительных единицах (s = = 0,02; 0,025 и т. п.), либо в процентах (s - 2 %; 2,5 % и т. п.).
Частота тока и ЭДС, наводимая в проводниках обмотки ротора, зависят от частоты тока и ЭДС обмотки статора и от скольжения:
f2 - f1s; Е2 - E1s,
где Е1— ЭДС обмотки статора; Е2 — ЭДС обмотки ротора, приведенная к числу витков обмотки статора.
Рис. 2.1. Механическая характеристика асинхронной машины
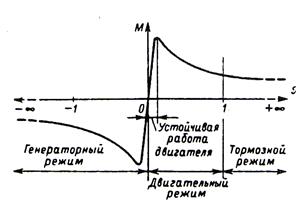
Теоретически асинхронная машина может работать в диапазоне изменения скольжения s = -...+ (рис. 2.1), но не при s = 0, так как в этом случае п - пс и проводники обмотки ротора неподвижны относительно поля статора, ЭДС и ток в обмотке равны нулю и момент отсутствует. В зависимости от практически возможных скольжений различают несколько режимов работы асинхронных машин (рис. 2.1): генераторный режим при s 0, двигательный при 0 s 1, трансформаторный при s = 1 и тормозной при s 1. В генераторном режиме ротор машины вращается в ту же сторону, что и поле статора, но с большей частотой. В двигательном — направления вращения поля статора и ротора совпадают, но ротор вращается медленнее поля статора: п = пс(1 - s). В трансформаторном режиме ротор машины неподвижен и обмотки ротора и статора не перемещаются относительно друг друга. Асинхронная машина в таком режиме представляет собой трансформатор и отличается от него расположением первичной и вторичной обмоток (обмотки статора и ротора) и наличием воздушного зазора в магнитопроводе. В тормозном режиме ротор вращается, но направление его вращения противоположно направлению поля статора и машина создает момент, противоположный моменту, действующему на вал. Подавляющее большинство асинхронных машин используют в качестве двигателей, и лишь очень небольшое количество — в генераторном и трансформаторном режимах, в тормозном режиме — кратковременно.
Для оценки механической характеристики асинхронного двигателя моменты, развиваемые двигателем при различных скольжениях, обычно выражают не в абсолютных, а в относительных единицах, т. е. указывают кратность по отношению к номинальному моменту: М* = M/Мном. Зависимость М* = f(s) асинхронного двигателя (рис. 2.2) имеет несколько характерных точек, соответствующих пусковому М*п, минимальному М*min, максимальному М*max и номинальному М*ном моментам.
Пусковой момент М*п характеризует начальный момент, развиваемый двигателем непосредственно при включении его в сеть при неподвижном роторе (s - 1). После трогания двигателя с места его момент несколько уменьшается по сравнению с пусковым (см. рис. 2.2). Обычно М*min на 10...15 % меньше М*п. Большинство двигателей проектируют так, чтобы их М*min был больше М*ном , так как они могут достигнуть номинальной скорости лишь при условии, что момент сопротивления, приложенный к валу, будет меньше, чем М*min .
Максимальный момент М*max характеризует перегрузочную способность двигателя. Если момент сопротивления превышает М*max, двигатель останавливается. Поэтому М*max называют также критическим, а скольжение, при котором момент достигает максимума, — критическим скольжением sкp. Обычно sкр не превышает 0,1...0,15; в двигателях с повышенным скольжением (крановых, металлургических и т. п.) sкp может быть значительно большим.
В диапазоне 0 s sкр характеристика М - f(s) имеет устойчивый характер. Она является рабочей частью механической характеристики двигателя. При скольжениях s sкр двигатель в нормальных условиях работать не может. Эта часть характеристики определяет пусковые свойства двигателя от момента пуска до выхода на рабочую часть характеристики.
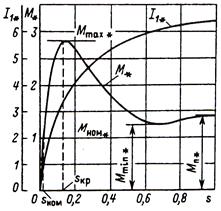
Рис. 2.2. Зависимость тока и момента асинхронного двигателя от скольжения
Трансформаторный режим, т. е. режим, когда обмотка статора подключена к сети, а ротор неподвижен, называют также режимом короткого замыкания двигателя. При s = 1 ток двигателя в несколько раз превышает номинальный, а охлаждение много хуже, чем при номинальном режиме. Поэтому в режиме короткого замыкания асинхронный двигатель, не рассчитанный для работы при скольжениях, близких к единице, может находиться лишь в течение нескольких секунд.
Режим короткого замыкания возникает при каждом пуске двигателя, однако в этом случае он кратковременен. Несколько пусков двигателя с короткозамкнутым ротором подряд или через короткие промежутки времени могут привести к превышению допустимой температуры его обмоток и к выходу двигателя из строя.
3. Аналитическое и графическое определение режимов работы асинхронной машины
Электромеханическое преобразование энергии может происходить в асинхронной машине в следующих трех режимах:
в режиме двигателя 0 s l, 1 0;
в режиме генератора s 0, 1;
в режиме тормоза s 1, 0.
Кроме того, важны еще два характерных режима работы, в которых электромеханическое преобразование энергии не происходит: режим идеального холостого хода (s = 0, = 1) и режим короткого замыкания (s = 1, = 0).
В режиме двигателя (область Д на рис. 3.2) под воздействием электромагнитного момента 0, направленного в сторону поля, ротор машины вращается в сторону поля со скоростью, меньшей, чем скорость поля (1 0, 0 s 1). В этом режиме
эм = 1 = ![]() 0; мех = = э2
0; мех = = э2 ![]() 0.
0.
Электрическая мощность Р1 = Рэм + Рм + Рэ1 0 преобразуется в механическую мощность Р2 = Рмех — д — 0, передаваемую через вал приводимой в движение машины.
Энергетические процессы в режиме двигателя иллюстрируются рис. 3.1, а, на котором направление активной составляющей тока ротора i2а совпадает с индуктированной в роторе ЭДС. Направление электромагнитного момента определяется электромагнитной силой Bmi2a, действующей на ток i2a .
Полезная механическая мощность Р2 оказывается меньше потребляемой из сети мощности на потери :
2 = 1- = 1 -(э1 + м+э2 + д + т),
И КПД двигателя выражается формулой:
= ![]() = 1-
= 1-![]() = f(s)
= f(s)
В режиме генератора (область Г на рис. 3.2) под воздействием внешнего момента Мв 0, направленного в сторону поля (рис. 3.1, б), ротор машины вращается со скоростью, превышающей скорость поля ( 1, s 0). В этом режиме в связи с изменением направления вращения поля (^) относительно ротора активная составляющая тока ротора г2а изменяет свое направление иа обратное (по сравнению с двигательным режимом). Поэтому электромагнитный момент = Bmi2a, уравновешивающий внешний момент, направлен против поля и считается отрицательным (М 0), мощности Рэ„ и Ртх также отрицательны:
эм = 1 = ![]() 0; мех = = э2
0; мех = = э2 ![]() 0.
0.
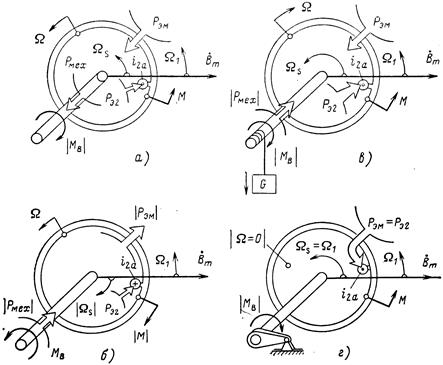
Рис. 3.1. Режимы работы асинхронной машины.
а — двигательный;
б — генераторный;
в — тормоза;
г — трансформатора (или короткого замыкания).
Направление преобразования энергии изменяется на обратное: механическая мощность Рг, подведенная к валу машины, преобразуется в электрическую мощность Plt поступающую в сеть. Поскольку мощность потерь всегда положительна (в любом режиме работы эти мощности превращаются в тепло), механическая мощность:
мех = эм - э2 0 при s 0
по абсолютному значению больше, чем электромагнитная (рис. 3.2):
|мех| = | эм | + э2
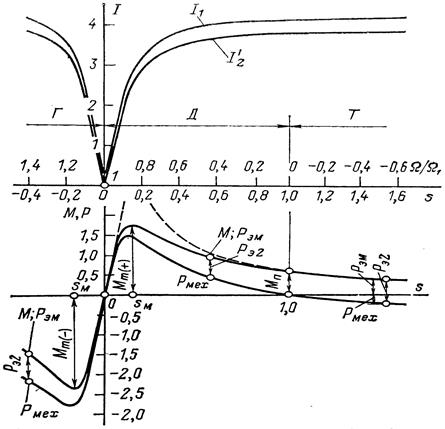
Рис. 3.2. Электромеханические характеристики асинхронной машины (в относительных единицах при 1/х = 1; /0 = 0,364; cos р0 = 0,185; Хг = Х2 = 0,125; Кг = 0,0375; Rs = 0,0425).
По той же причине потребляемая механическая мощность
P2 = P1 - 0
по абсолютному значению на потери больше электрической мощности, отдаваемой в сеть:
|2| = | 1 | + ,
и КПД генератора
= ![]() = 1-
= 1-![]() .
.
В режиме тормоза (область Т на рис. 3.2) под воздействием внешнего момента Мв 0, направленного против вращения поля (рис. 3.1, в), ротор машины вращается в сторону, противоположную полю (0, s = ![]() 1). В этом режиме электромагнитный момент М, уравновешивающий внешний момент, как и в режиме двигателя (направление вращения поля .5 относительно ротора остается таким же, как в режиме двигателя), направлен в сторону поля и считается положительным (М 0). Однако, поскольку 0, механическая мощность оказывается отрицательной:
1). В этом режиме электромагнитный момент М, уравновешивающий внешний момент, как и в режиме двигателя (направление вращения поля .5 относительно ротора остается таким же, как в режиме двигателя), направлен в сторону поля и считается положительным (М 0). Однако, поскольку 0, механическая мощность оказывается отрицательной:
мех = = э2 ![]() 0
0
Это означает, что она подводится к асинхронной машине. Электромагнитная мощность в этом режиме положительна:
эм = 1 = ![]() 0
0
Это означает, что она поступает из сети в машину.
Подведенные к ротору машины со стороны сети |эм| и вала |мех| мощности превращаются в электрические потери Рэ2 в сопротивлении ротора R2 (рис. 3.2):
|мех| + | эм | = э2 ![]() + э2
+ э2![]() = э2 = m1 R2(I 2)2 .
= э2 = m1 R2(I 2)2 .
Асинхронная машина в этом режиме может быть использована для притормаживания опускаемого подъемным краном груза. При этом мощность | мех | = | | поступает в ротор машины (см. рис. 3.1).
В режиме идеального холостого хода внешний вращающий момент в, момент трения т = т/ и момент, связанный с добавочными потерями, Мд = д/ равны нулю. Ротор вращается со скоростью поля ( = 1, s = 0) и не развивает полезной механической мощности (М = 0, Рмех = = 0).
В режиме идеального холостого хода внешний момент, приложенный к валу машины, равен нулю (Мв = 0). Считается также, что отсутствует момент от трения вращающихся частей. Ротор машины вращается с той же угловой скоростью, что и вращающееся поле ( = 1), скольжение равно нулю (s = 0); ЭДС и токи в обмотке ротора не индуктируются (I2=0), и электромагнитный момент, уравновешивающий внешний момент и момент сил трения, равен нулю (М = 0).
Режим холостого хода асинхронной машины аналогичен режиму холостого хода трансформатора. В асинхронной машине и в трансформаторе ток в этом режиме имеется только в первичной обмотке I1 0, а во вторичной — отсутствует (I2 = 0); в машине и в трансформаторе магнитное поле образуется в этом режиме только первичным током, что позволяет называть ток холостого хода намагничивающим током (I1 = I0). В отличие от трансформатора система токов I0 в фазах многофазной обмотки статора образует вращающееся магнитное поле.
По аналогии с трансформатором уравнение напряжений необходимо составить при холостом ходе только для фазы обмотки статора, являющейся первичной обмоткой:
![]() ,
,
где ![]() — ЭДС, индуктированная в фазе вращающимся магнитным полем с потоком Фга;
— ЭДС, индуктированная в фазе вращающимся магнитным полем с потоком Фга;
![]() — фазное напряжение первичной сети;
— фазное напряжение первичной сети;
R1, Х1 — активное и индуктивное сопротивления рассеяния фазы первичной обмотки (см. далее).
В силу малости падений напряжений X1I0 и R1I0 напряжение ![]() почти полностью уравновешивается ЭДС
почти полностью уравновешивается ЭДС ![]() т. е.
т. е. ![]() = -
= -![]() .
.
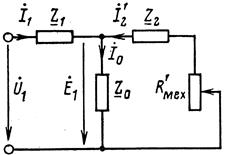
В режиме холостого хода Rмех = R2![]() = , ток R2 = 0 и схема замещения содержит только одну ветвь Z1 + Z0 (Т-образная и Г-образная схемы не отличаются друг от друга).
= , ток R2 = 0 и схема замещения содержит только одну ветвь Z1 + Z0 (Т-образная и Г-образная схемы не отличаются друг от друга).
В режиме короткого замыкания под действием внешнего момента в, уравновешивающего электромагнитный момент М, ротор удерживается в неподвижном состоянии ( = 0, s = ![]() = 1) и не совершает полезной механической работы (Рмех = = 0).
= 1) и не совершает полезной механической работы (Рмех = = 0).
Направление тока i2a и электромагнитного момента остается таким же, как в режиме двигателя, и 0 (см. рис. 3.1, г). Электромагнитная мощность Рэм = 1 0 — она поступает в ротор из статора и превращается в электрические потери (Рэм = = Рэ2). В этом режиме асинхронная машина работает как коротко-замкнутый со вторичной стороны трансформатор, отличаясь от него только тем, что в ней существует вращающееся поле взаимной индукции вместо пульсирующего поля в трансформаторе.
В режиме короткого замыкания Rмех = R2![]() = 0 и сопротивление схемы замещения по рис. 42-3 определяется параллельно включенными сопротивлениями Z1 + Z0 и Z1 + Z2. Имея в виду, что |Z1 + Z2| « |Z1 + Z0|, можно отбросить ветвь Z1 + Z0 и считать сопротивление схемы замещения при коротком замыкании равным
= 0 и сопротивление схемы замещения по рис. 42-3 определяется параллельно включенными сопротивлениями Z1 + Z0 и Z1 + Z2. Имея в виду, что |Z1 + Z2| « |Z1 + Z0|, можно отбросить ветвь Z1 + Z0 и считать сопротивление схемы замещения при коротком замыкании равным
Zк = Z1 + Z2 = Rк + jXк (43-3)
где
Rк= R1+ R2
Если к неподвижному ротору асинхронной машины подключить симметричную систему дополнительных сопротивлений R2д + jХ2д, то она будет работать как трансформатор, преобразующий электрическую энергию, поступающую из первичной сети, в электрическую энергию с другими параметрами, потребляемую дополнительными сопротивлениями R2д + jХ2д. Поэтому режим при s = 1 называется также режимом трансформатора.
Изменить режим работы асинхронной машины или скольжение машины в данном режиме (при U1 = const и f1 = const) можно только путем изменения внешнего момента Мв, приложенного к валу машины. При Мв = 0 ротор вращается со скоростью поля ( = 1, s = 0) и машина не совершает полезного преобразования энергии. При воздействии на вал ротора внешнего момента Мв, направленного против направления вращения поля, скорость ротора уменьшается до тех пор, пока не появится электромагнитный момент = f(s), который уравновесит момент Мв. Машина переходит в режим двигателя s = ![]() 0. Наоборот, при воздействии внешнего момента Мв направленного по вращению поля, скорость ротора делается большей, чем скорость поля ( 1), и машина переходит в режим генератора (s=
0. Наоборот, при воздействии внешнего момента Мв направленного по вращению поля, скорость ротора делается большей, чем скорость поля ( 1), и машина переходит в режим генератора (s=![]() 0).
0).
Наконец, к режиму тормоза можно перейти из режима двигателя, изменяя внешний момент Мв таким образом, чтобы ротор сначала остановился, а затем пришел во вращение в противоположную сторону (по отношению к полю).
Список литературы
Иванов-Смоленский А. В. Электрические машины: Учебник для вузов. – М.: Энергия, 1980. – 928 с., ил.
Вольдек А. И. Электричесие машины. Учебник для студентов высших учебн. Заведений. Л., «Энергия», 1974.
Проектирование электрических машин: Учеб. Для вузов / Под ред. И. П. Копылова. М.: Высш. Шк., 2002. – 757 с.: ил.