Розробка схеми приймача цифрової тропосферної станції
СОДЕРЖАНИЕ: Розробка схеми приймача цифрової тропосферної станції 1. Схема приймального тракту В класичному понятті приймальний тракт складається з антенно-фідерного пристрою, самого приймача і приймальної частини каналоутворюючого обладнання.Розробка схеми приймача цифрової тропосферної станції
1. Схема приймального тракту
В класичному понятті приймальний тракт складається з антенно-фідерного пристрою, самого приймача і приймальної частини каналоутворюючого обладнання.
Каналоутворююче обладнання в даній роботі не розглядається, а основний наголос зроблено на сам приймач і запропоновано нові принципи реалізації антенного пристрою для розробляємого приймача ТРС з цифровою обробкою інформації [12].
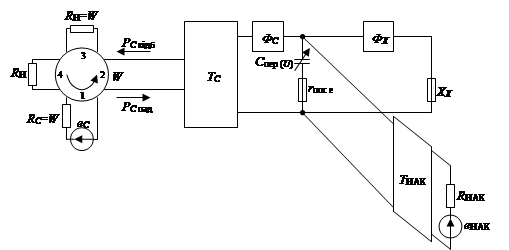
Розробляємий приймальний тракт, що зображений на рис. 1, складається з таких основних елементів:
- антенно-фідерний пристрій;
- канальний тракт;
- спеціалізована електронно-обчислювальна машина;
- приймальна частина типової апаратури ущільнення.
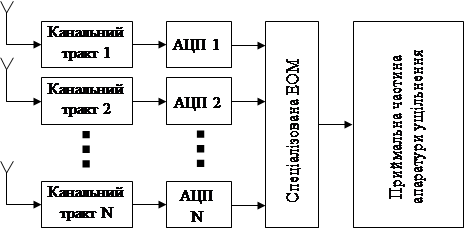 |
Рис. 1. Приймальний тракт цифрової ТРС
Кількість канальних трактів рівна числу елементів ЦАР. На рис. 2 зображена схема канального тракту.
 |
Рис. Схема канального тракту
Всі канальні тракти ідентичні і складаються з:
- малошумлячого підсилювача потужності;
- блока перетворювача частоти та підсилювача проміжної частоти.
Розроблений приймальний тракт містить одну антену, яка складається з n елементів, які рознесені у просторі й приймають широкосмуговий сигнал від антени кореспондента.
Сигнали з n елементів ЦАР поступають по n незалежним канальним трактам підсилюються в МШП і поступають на блок проміжної частоти, де відбувається перенесення сигналів з робочої на проміжну частоту 70 МГц. Після підсилення сигнал поступає на вхід АЦП в якому відбувається перетворення сигналу із аналогового до цифрового виду і після чого сигнали n канальних трактів поступають на вхід спеціалізованої ЕОМ.
АЦП являється дуже важливою частиною приймача. До АЦП висуваються дуже жорсткі вимоги.
Значне розповсюдження широкодіапазонних програмуємих приймачів сигналів вимагає від виробників весь час удосконалювати перетворювачі, а саме покращувати параметри по змінному струму, шумовим і динамічним характеристикам, підвищення розрішуючої можливості, швидкості перетворення аналогового сигналу в цифровий вид із заданою якістю.
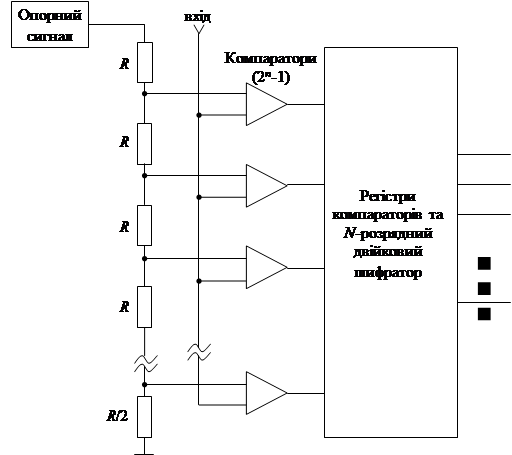
Одним із варіантів побудови АЦП є схема паралельного перетворювача, яка приведена на рис. 3.
 |
||||
 |
||||
Рис. 3. Паралельний АЦП
Для кожного можливого вхідного рівня використовується один компаратор і загальний вихідний сигнал отримуємо у вигляді двійкового коду шляхом відповідного декодування. Звичайний аналоговий компаратор доцільно розглядати, як одно розрядний паралельний перетворювач і якщо він являється фіксуючим пристроєм, то отримуємо вже перетворювач з регістром на виході [14].
Такий перетворювач має внутрішню архітектуру конвеєрного типу, завдяки чому цифрову обробку одного відліку можна здійснювати із записом наступного відліку. Таким чином виникає можливість здійснювати перетворення дуже швидко: новий результат з’являється на кожному такті. В такому випадку необхідна велика кількість компараторів (256 для 8-ми розрядного перетворювача), що визначає відносно високу ціну пристрою. Декілька років назад такий перетворювач являвся значною частиною обладнання, але останні досягнення схемотехніки дозволяють виконати необхідні перетворювачі в інтегральному вигляді, що значно зменшує їх масогабаритні показники.
Крім складності побудови, багато розрядні паралельні АЦП мають обмежену точність із-за вхідних напруг зміщення компараторів. Різниця сусідніх напруг може складати лише декілька мілівольт і якщо сумарне зміщення пари сусідніх компараторів перевищує цю величину, логічний стан в неправильній послідовності поступає на логічну схему декодування. Навіть якщо логіка роботи схеми передбачає це, помилка все ж таки неминуча.
Дана проблема вирішується при реалізації перетворювача такого типу у вигляді інтегральної схеми. Останнім часом перетворювачі реалізуються в інтегральній схемі на КПОМ-структурі, в якому вище вказана проблема вирішується шляхом автокомпенсації зміщення нуля кожного компаратора на протязі частини циклу перетворення. В схемі з автокомпенсацією на вхід кожного компаратора підключається конденсатор, з’єднаний з відповідною точкою опорного сигналу, а вихід компаратора з’єднаний з його ж входом. Тому конденсатор заряджається до напруги, рівної сумі напруги точки опорного сигналу і напруги зміщення компаратора. На протязі другої частини циклу конденсатор підключається до точки подачі вхідного сигналу: в той же час кільце зворотнього зв’язку компаратора розривається, різниця напруг в точках подач вхідного і опорного сигналів впливає на компаратор і відповідний сигнал з’являється на виході. Великі комутуємі струми конденсаторів призводять до деякого балансування, а отримання низького вхідного опору зазвичай не являється проблемою в високошвидкісних системах, де застосовуються ці пристрої [12].
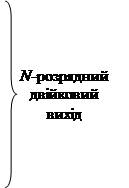
Доцільно розглянути варіант побудови АЦП за принципом послідовного наближення. Перетворювачі послідовного наближення реалізуються на основі ЦАП і логічної системи, яка керує ЦАП до моменту узгодження його вихідного сигналу з вхідним аналоговим сигналом АЦП. В даному випадку цифровий вихід ЦАП буде відповідати вимагаємому вихідному цифровому сигналу АЦП. Спрощена блок-схема пристрою зображена на рис. 4. Регістр послідовного наближення представляє собою ту логічну систему, яка реалізує визначений алгоритм.
 |
Рис. 4. Блок-схема перетворювача послідовного наближення
В компараторі відбувається порівняння вхідного сигналу з вихідним сигналом ЦАП, а результат логічної обробки знову поступає на регістр, вихідний цифровий сигнал якого в кінці перетворення буде відповідати вимагаємому значенню.
Часова діаграма роботи перетворювача приведена на рис. 5. Як видно із діаграми, сигналом з регістра послідовного наближення СЗР встановлюється логічна «1», а всі інші розряди – логічний «0». Це значення відповідає половині повної шкали перетворення, і після першого періоду тактового сигналу на регістр послідовного наближення з виходу компаратора приходить сигнал логічного порівняння сигналу на виході ЦАП з вхідним аналоговим сигналом. Якщо вхідний сигнал більше сигналу на виході ЦАП, то в регістрі послідовного наближення стан логічної «1» СЗР зберігаються; якщо менше, то СЗР скидається в «0» і встановлюється в стан логічної «1» другий значущий розряд [13].
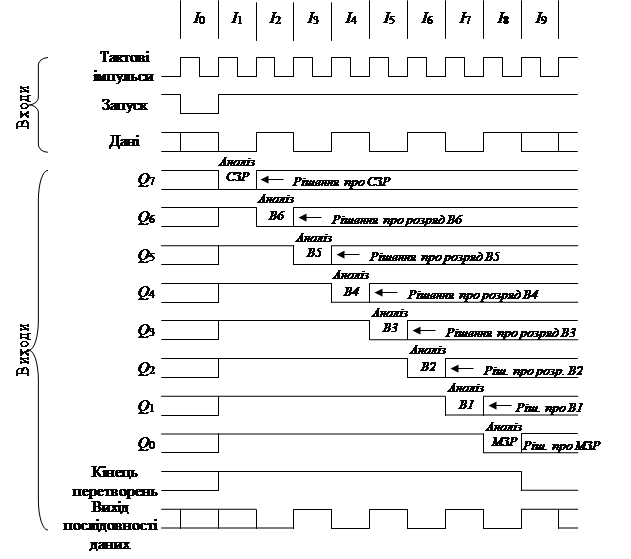 |
Рис. 5. Часова діаграма роботи перетворювача
І така процедура буде повторюватися до тих пір, поки не буде встановлений в стан логічної «1» МЗР і не проаналізований, як і всі попередні розряди. На рис. 6 зображено розвиток процесу послідовного наближення в аналоговому вигляді і те яким чином відбувається отримання правильного результату для конкретного значення аналізуємого сигналу.
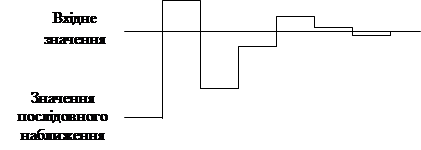 |
Рис. 6. Послідовне наближення
Для кращого розуміння роботи АЦП послідовного наближення доцільно зобразити блок-схему алгоритму процесу послідовного наближення за допомогою «логічного аналізатора» і «осцилографа», що і зображено на рис. 7.
Якщо розглядати програмну реалізацію, то функцію регістра послідовного наближення може виконувати комп’ютер при організації відповідних апаратних зв’язків, що має суттєве значення при практичній реалізації розробленого приймача, а також повинно враховуватися при розробці спеціалізованої ЕОМ і програмного забезпечення для її функціонування. На думку провідних вчених в даній галузі, досить легко створити таку систему, яка б працювала як ЦАП або як АЦП послідовного наближення в залежності від програмного управління [10].
Отже розглянуті вище схеми АЦП мають ряд недоліків і переваг в кожній з них. АЦП паралельного типу має дуже високу швидкодію, що дуже важливо враховуючи те, що процес перетворення сигналу з аналогового в цифровий вид необхідно проводити на частоті 70 МГц, а в перспективі на робочій частоті станції, що досить суттєво зменшить вартість і масо-габаритні показники приймача та підвищить відношення сигнал/шум за рахунок відсутності блоку ПЧ. АЦП паралельного типу має відносно низький рівень точності процесу перетворення, що не можливо не враховувати.
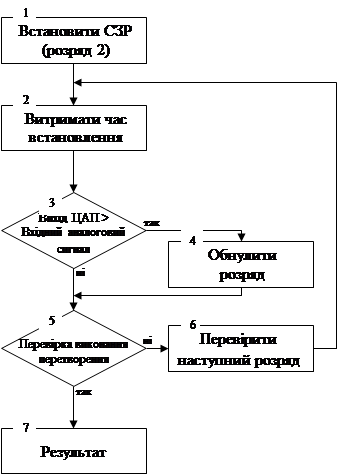 |
Рис. 7. Спрощений алгоритм послідовного наближення
Проаналізувавши дві схеми АЦП, доцільно висунути ряд вимог до схеми АЦП, яку необхідно розробити для даного приймача, а саме:
- швидкодія процесу перетворення сигналу повинна бути дуже високою, порядку сотні МГц, з перспективою переходу на робочу частоту станції;
- процес перетворення сигналу повинен проходити з максимальною точністю;
- процес перетворення сигналу повинен контролюватися за допомогою спеціалізованої ЕОМ;
- схема АЦП повинна бути реалізована у вигляді мікросхеми, що значно зменшить її масо-габаритні показники;
- важливою вимогою до АЦП є його вартість, адже враховуючи велику кількість АЦП в одному приймачі, їх ціна повинна бути низькою.
Варіанти антенних пристроїв тропосферної станції
Доцільним буде розглянути такий важливий елемент, розробленого приймача, як антенний пристрій. В розробленому приймачі велика увага приділяється саме антенному пристрою в зв’язку з тим, що саме він визначає параметри приймача в цілому.
Розробка структурної схеми приймального тракту для систем тропосферного зв’язку має на меті модернізацію його основних складових на основі сучасних досягнень радіоелектроніки. В даній роботі запропонована розробка приймальної антени, як складової приймального тракту, на основі використання цифрових антенних решіток, а також, як варіант обробки сигналів в антенних решітках запропоновано метод максимальної правдоподібності.
В багатьох практичних задачах радіолокації, радіонавігації, радіозв’язку необхідно знати кутові координати джерел випромінювань, що одночасно формують сигнали з однаковими несучими частотами. До подібних сигналів відносяться навмисні перешкоди, що створюються противником із різних точок простору працюючим радіоелектронним засобам, а також природні завади, котрі обумовлені особливостями розповсюдження сигналів в навколоземному просторі, що призводить до багатопроменевості в точці прийому.
Як показує аналіз [6], системи обробки сигналів на фоні неізотропних за простором (локальних) завад доцільно будувати на базі антенних решіток по схемі з компенсацією завад на виходах зформованих допоміжних просторових сигналів. Останні забезпечують оптимальне виділення локальних завад на фоні внутрішніх шумів і мають такі ж діаграми направленості, як і сигнальний (основний) канал. Для формування допоміжних каналів у складі РЕЗ необхідно мати спеціальний пристрій оцінки числа і кутових параметрів ДВ, алгоритм функціонування якого можуть бути засновані на спектральних методах оцінки. Відомо [8], що спектральні методи оцінки на основі даних вимірів, що отримані за допомогою АР, дозволяють зформувати максимально достовірні оцінки кутових координат ДВ. Задача визначення напрямку ДВ за допомогою АР еквівалентна задачі оцінки спектру сигналу [5]. Алгебраїчний підхід до обробки сигналів в АР дозволяє створювати все нові алгоритми спектральної оцінки. На сьогодні відома досить велика кількість вказаних методів.
Одним з найбільш відомих алгоритмів обробки сигналів в АР, що володіє достатньо високою вирішуючою здатністю, являється метод максимальної правдоподібності. Цей алгоритм вперше був запропонований Кейпоном [7]. Відповідна оцінка будується шляхом знаходження вектора пеленгаційного (опорного) напрямку А
, при введені якого результуючий сигнал ![]() має максимальну потужність при обмеженні
має максимальну потужність при обмеженні ![]() , де F
0
– являє собою вектор, що характеризує ідеальну плоску хвилю, що розповсюджуються по лінії візирування. Зміст прийнятого обмеження заключається в тому, що для кожного напрямку спостереження рівень приймаємого сигналу під час обробки АР не змінювався.
, де F
0
– являє собою вектор, що характеризує ідеальну плоску хвилю, що розповсюджуються по лінії візирування. Зміст прийнятого обмеження заключається в тому, що для кожного напрямку спостереження рівень приймаємого сигналу під час обробки АР не змінювався.
Для знаходження комплексного вектора А
мінімізується функція ![]() , де
, де ![]() – множник Лагранжа. В результаті рішення приймає вигляд [5]:
– множник Лагранжа. В результаті рішення приймає вигляд [5]:
![]() . ( 1)
. ( 1)
Потужність результуючого сигналу АР, що орієнтована в напрямку, котрий заданий вектором F 0 , описується виразом:
![]() . ( 2)
. ( 2)
Дж.Кейпон назвав ![]() оцінкою високого вирішення, так як описаний вище метод оцінки володіє досить високою вирішуючою здатністю. Спектральна оцінка за даним методом описує відносні компоненти спектру і не є оцінкою істинної спектральної щільності потужності [8]. Тому назва методу є не зовсім точною, так як даний метод не дає оцінку максимальної правдоподібності для функції спектральної щільності потужності. До переваг максимальної правдоподібності оцінки необхідно віднести те, що вона дає спектр, висоти піків в якому, прямо пропорційні потужності гармонік, котрі присутні в аналізуємому процесі.
оцінкою високого вирішення, так як описаний вище метод оцінки володіє досить високою вирішуючою здатністю. Спектральна оцінка за даним методом описує відносні компоненти спектру і не є оцінкою істинної спектральної щільності потужності [8]. Тому назва методу є не зовсім точною, так як даний метод не дає оцінку максимальної правдоподібності для функції спектральної щільності потужності. До переваг максимальної правдоподібності оцінки необхідно віднести те, що вона дає спектр, висоти піків в якому, прямо пропорційні потужності гармонік, котрі присутні в аналізуємому процесі.
Згідно виразу ( 2) процес визначення спектру складається з двох етапів.
На першому етапі по вхідним даним x обраховується матриця R .
На другому етапі задається деякий початковий опорний напрям r і, відповідно, початковий вектор F 0 , для якого розраховується значеня Р МП . Потім вводиться наступне значення опорного напрямку і розрахунок повторюється. Розрахунок проводиться у всьому допустимому діапазоні кутів візирування в окремих напрямках, що розміщенні досить близько. Оскільки метод МП відноситься до групи послідовних методів, далі відшукуються положення максимумів. За положенням останніх оцінюється кутові координати ДВ, а за їх кількістю – кількість ДВ. Поряд із алгоритмом ( 2) Кейпона для оцінки кутових координат ДВ можна застосувати статистики Кейпона:
![]() . ( 3)
. ( 3)
Необхідність використання статистики Кейпона виникає під час прийому негаусівських та нестаціонарних сигналів ДВ великої інтенсивності [8]. Необхідно зауважити, що в подібній ситуації кращі показики мають більш складні за розрахунком, але близькі за структурою алгоритми за статистиками «відношення Релея» і «теплового шуму», що мають відповідно вигляд:
![]() ; ( 4)
; ( 4)
![]() . ( 5)
. ( 5)
Оцінка кутових координат, що пеленгуються ДВ, знаходяться за максимумом функцій, котрі описують дані статистики, шляхом послідовного пошуку. Для більш повного розуміння значення саме антенного пристрою у формуванні параметрів приймача, необхідно розглянути варіанти побудови антен. Для практичної реалізації антени в розробленому приймачі раціонально застосувати фазовану антенну решітку. Фазована антенна решітка не являється чимось новим у сучасній техніці, вона широко використовується в радіолокації, але саме застосування її в якості антени в техніці зв’язку є досить перспективним. На сучасному етапі розвитку модулі, які застосовуються в активних фазованих решітках, мають в своєму складі керуємі фазоповертачі, схеми управління та контролю. Крім того, специфіка АФАР, які будуть застосовуватися в техніці зв’язку внесе свої особливості в функціональну схему модуля. Загальною вимогою для модулів АФАР являється ідентичність їх фазочастотних характеристик, причому при роботі приймальних модулів в умовах значної зміни рівня вхідного сигналу (що особливо важливо в тропосферному зв’язку) додається також вимога ідентичності фазоамплітудних характеристик
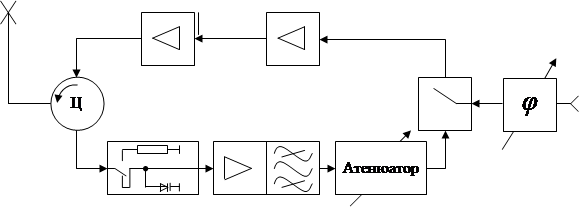 |
Рис. 8,б. Прийомо-передавальний модуль АФАР
Розглянемо особливості побудови функціональних схем прийомо-передаючих модулів АФАР. На рис. 8. зображено схеми прийомо-передаючих модулів з перетворенням і без перетворення частоти відповідно.
Особливістю модуля виконаного по схемі рис. 8,а, являється застосування множників частоти на чотири як в приймальній так і в передаючій частині. Це в свою чергу дозволяє, по-перше, підвищити діапазон робочих частот модуля, по-друге, реалізувати фазоповертачі на більш низькій частоті і з меншими фазовими зсувами. Як видно зі схеми, в приймальній частині модуля відсутній МШП. Принцип роботи такого модуля заключається в слідуючому: в режимі прийому за допомогою двох перемикачів на змішувач подаються потужності вхідного сигналу і гетеродину, а в режимі передачі за допомогою цих же перемикачів на випромінювач подається потужний вихідний сигнал модуля. Недоліком модуля являється те, що перемикач, підключений до випромінювача, в режимі передачі працює на високому рівні потужності, що знижує ККД модуля. Даний недолік відсутній в модулі, що зображений на рис. 8,б, за рахунок введення циркулятора. Перемикач винесений в приймальну частину модуля, яка крім нього мітить в своєму складі діодний обмежувач, МШП, фільтр і дискретний атенюатор. Фазоповертач в ній використовується і на прийом і на передачу. Так як обидва перемикачі працюють на низькому рівні потужності, вони можуть бути уніфікованими. Дискретний атенюатор дозволяє синтезувати діаграму направленості АФАР в режимі прийому.
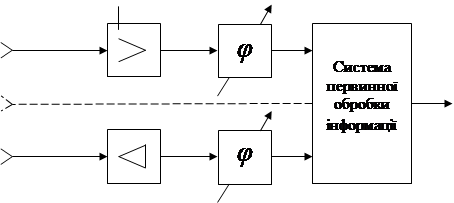
Розглянемо особливості приймальних модулів АФАР. В модулі по схемі рис. 9,а сигнал приймається випромінювачем, підсилюється, фазується і поступає в систему первинної обробки синалів, яка в найпростішому випадку представляє собою багатоканальний суматор, на інші входи якого поступають вихідні сигнали інших модулів.
 |
![]()
![]() а)
а)
 |
б)
Рис. 9. Приймальні модулі АФАР
В модулі по схемі рис. 9,б додатково включено змішувач і ППЧ, що з одного боку вимагає в складі АФАР ще однієї розподільчої системи для підведення потужності гетеродина до всіх модулів, а з іншого боку, розподільча система для підключення виходу кожного модуля до системи первинної обробки сигналів виявляється простіша, так як на проміжній частоті неточності довжин ліній передачі значно менше впливають на ідентичність фазочастотних характеристик модулів [14]. Крім того, фазоповертачі можуть розташовуватися в тракті гетеродина і відповідно, виконуються на фіксованій частоті або в тракті проміжної частоти і виконуються більш точними і дешевими. Чутливість АФАР повинна бути більша за чутливість пасивної ФАР, в противному випадку АФАР не буде мати одної з основних переваг у порівнянні з пасивною ФАР. Це обмеження пред’являє певні вимоги до підсилювачів і шумових властивостей вузлів приймального модуля. Для коефіцієнта шуму модуля по схемі рис. 9:
![]() ( 6)
( 6)
![]() і
і ![]() – коефіцієнт шуму і коефіцієнт потужності МШП;
– коефіцієнт шуму і коефіцієнт потужності МШП;
![]() – коефіцієнт шуму вхідного пристрою підлюченого до виходу системи первинної обробки;
– коефіцієнт шуму вхідного пристрою підлюченого до виходу системи первинної обробки;
![]() і
і ![]() – втрати на фазоповертачі та суматорі (в системі первинної обробки сигналів).
– втрати на фазоповертачі та суматорі (в системі первинної обробки сигналів).
Аналогічно для коефіцієнта шуму модуля пасивної ФАР:
![]() ( 7)
( 7)
Поділивши рівняння ( 7) на ( 6) ми одержимо енергетичний виграш, який забезпечить АФАР у порівнянні з пасивною ФАР:
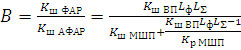 ( 8)
( 8)
Максимально великий виграш реалізується при достатньо великому коефіцієнті ![]() :
:
![]() ( 9)
( 9)
Відповідний виграш можна одержати при:
![]() ,
, ![]() ( 10)
( 10)
Наприклад:
![]() ;
;
![]() ;
;
![]() .
.
Максимальний виграш ![]() при
при ![]() (17 дБ), а оптимальний виграш
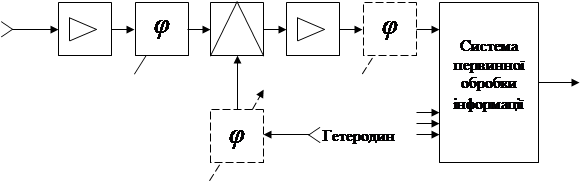
(17 дБ), а оптимальний виграш ![]() . Для модуля з перетворенням частоти максимальний виграш також оцінюється по формулі ( 9). Ідентичність фазочастотних характеристик модулів зазвичай досягається відомими прийомами гібридно-інтегральних технологій. Але вона ще може досягатися також раціональною будовою функціональних схем модулів, в основі яких закладені різні методи самокомпенсації нестабільних фазових відхилень. Наприклад, в приймальних модулях по схемі рис. 10 ідентичність фазових відхилень здійснюється за допомогою відомого методу «подвійного частотного переносу». Як відмічалось нестабільність частоти та фази допоміжного генератора в фільтрах побудованих на основі цього методу, компенсується. Якщо джерело сигналу та гетеродина поміняти місцями, тобто напругу корисного сигналу подати синфазно на обидва змішувачі, а напругу гетеродина тільки на один змішувач, то напруга на виході другого змішувача буде залежати від фазових зсувів МШП. Крім того, в такому модулі не потрібен керуючий фазоповертач, так як незалежно від фази сигналу на виході модуля фаза вихідного сигналу буде визначатися фазою гетеродину [14].
. Для модуля з перетворенням частоти максимальний виграш також оцінюється по формулі ( 9). Ідентичність фазочастотних характеристик модулів зазвичай досягається відомими прийомами гібридно-інтегральних технологій. Але вона ще може досягатися також раціональною будовою функціональних схем модулів, в основі яких закладені різні методи самокомпенсації нестабільних фазових відхилень. Наприклад, в приймальних модулях по схемі рис. 10 ідентичність фазових відхилень здійснюється за допомогою відомого методу «подвійного частотного переносу». Як відмічалось нестабільність частоти та фази допоміжного генератора в фільтрах побудованих на основі цього методу, компенсується. Якщо джерело сигналу та гетеродина поміняти місцями, тобто напругу корисного сигналу подати синфазно на обидва змішувачі, а напругу гетеродина тільки на один змішувач, то напруга на виході другого змішувача буде залежати від фазових зсувів МШП. Крім того, в такому модулі не потрібен керуючий фазоповертач, так як незалежно від фази сигналу на виході модуля фаза вихідного сигналу буде визначатися фазою гетеродину [14].
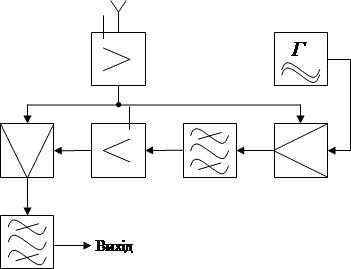 |
Рис. 10. Приймальний модуль АФАР
Однак певна будова модуля АФАР може бути використана тільки для певного класу приймальних сигналів. Як наголошувалось, призначення АФАР в багатьох випадках виявляє схемну побудову модуля. Наприклад, в самофазуючихся антенних решітках (додавання всіх елементів в них відбувається незалежно від фазового фронту падаючої хвилі) приймальні модулі побудовані з використанням фазової автопідстройки частоти. На рис. 11 представлені дві функціональні схеми таких модулів.
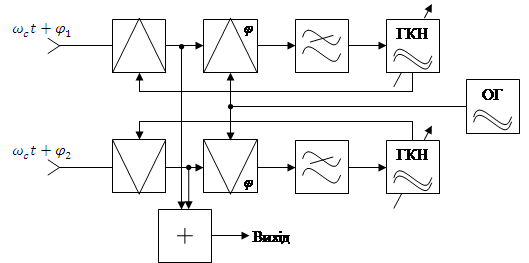 |
Рис. 11,а. Схема модуля АФАР
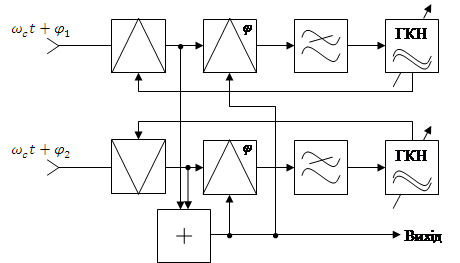 |
Рис. 11,б. Схема модуля АФАР
В модулі по схемі рис. 11,а фаза опорного сигналу задається спеціальним опорним генератором, частота ![]() якого близька до частоти приймаємого сигнала
якого близька до частоти приймаємого сигнала ![]() . Сигнал від випромінювача через змішувач подається на фазовий детектор, де відбувається його порівняння по фазі з опорним сигналом [14]. З виходу фазового детектора сигнал помилки пропорційний різниці фаз прийнятого і опорного сигналів діють на генератор керуємий напругою, частота вихідних коливань якого залежить від керуючої напруги. Замкнутий ланцюг зворотнього зв’язку ГКН-змішувач встановлює рівність фаз прийнятого сигналу на виході змішувача і опорного сигналу. Перевагою такого модуля являється відсутність шуму в опорному сигналі. Його використання доцільне, якщо частота приймаємого сигналу відома на перед з високою точністю, так як ГКН повинен зкомпенсувати зсув частоти в наслідок нестабільності передавача.
. Сигнал від випромінювача через змішувач подається на фазовий детектор, де відбувається його порівняння по фазі з опорним сигналом [14]. З виходу фазового детектора сигнал помилки пропорційний різниці фаз прийнятого і опорного сигналів діють на генератор керуємий напругою, частота вихідних коливань якого залежить від керуючої напруги. Замкнутий ланцюг зворотнього зв’язку ГКН-змішувач встановлює рівність фаз прийнятого сигналу на виході змішувача і опорного сигналу. Перевагою такого модуля являється відсутність шуму в опорному сигналі. Його використання доцільне, якщо частота приймаємого сигналу відома на перед з високою точністю, так як ГКН повинен зкомпенсувати зсув частоти в наслідок нестабільності передавача.
В модулі по схемі рис. 11,б в якості опорного використовується сигнал з виходу суматора вихідних напруг всіх модулів. Не дивлячись на те, що в опорному сигналі такого модуля є шуми (опорним сигналом являється прийнятий і усереднений сигнал) перешкодостійкість його може бути не гірше ніж модуля за схемою рис. 11,а, що пояснюється можливістю звуження шумової смуги системи ФАПЧ, так як в даному випадку доплерівський зсув частоти присутній в опорному сигналі і компенсації підлягають лише нестабільність частоти передавача та повільне зміщення фази сигналів в кожному модулі.
Іншим прикладом, коли функціональна схема модуля і параметри вхідних в нього вузлів визначаються призначенням АФАР, являється прийомо-передавальний модуль перевипромінюючої АФАР. Як віломо із теорії ФАР, для роботи перевипромінюючої ФАР необхідно створити у випромінювачах фазове розподілення комплексно спряжене фазовому розподілу для прийнятого сигналу, яке можливо отримати різними способами.
На рис. 12 приведена функціональна схема прийомо-передавального модуля, в якому спряження фазових зсувів здійснюється за допомогою перетворення частоти прийнятого сигналу.
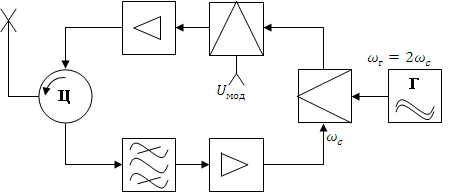 |
Рис. 1 Функціональна схема прийомо-передавального модуля АФАР
На виході змішувача ![]() маємо сигнал:
маємо сигнал:
![]()
![]() . ( 11)
. ( 11)
Якщо частота гетеродина ![]() , то перший доданок в цьому виразі має фазу
, то перший доданок в цьому виразі має фазу ![]() , спряжену фазі отримуємого сигналу. Як видно спряжені по фазі сигнали отримано тут шляхом інвертування спектру прийнятого сигналу. В модуляторі на сигнал із спряженою фазою накладається інформація
, спряжену фазі отримуємого сигналу. Як видно спряжені по фазі сигнали отримано тут шляхом інвертування спектру прийнятого сигналу. В модуляторі на сигнал із спряженою фазою накладається інформація ![]() і здійснюється зсув сигналу по частоті. Потім сигнал посилюється і перевипромінюється [14]. Зсув по частті дозволяє збільшити розв’язку приймальної і передавальної частини модуля за допомогою смугового фільтра налаштованого на приймаємий сигнал.
і здійснюється зсув сигналу по частоті. Потім сигнал посилюється і перевипромінюється [14]. Зсув по частті дозволяє збільшити розв’язку приймальної і передавальної частини модуля за допомогою смугового фільтра налаштованого на приймаємий сигнал.
Розглянуті ФАР мають значні переваги перед звичайними антенами, що і було доведено вище, але перспективна тропосферна станція з цифровою обробкою інформації передбачає більш досконалий антенний пристрій.
Ключовим рішенням стало використання (вперше для вирішення такої задачі) прийомо-передавальної ЦАР, в якій здійснюється цифрове формування променів, характеристики направленості. На сучасних ЦАР при 128 активних дипольних елементах комплект процесорів обробки сигналів дозволяє формувати одночасно 250-300 променів, звичайно для ТРС такі можливості не потрібні, отже є можливість зменшити кількість елементів ЦАР і обчислювальні потужності процесорів, що звичайно підвищить надійність станції, а головне зменшить вартість обладнання.
Цифрове формування променів – єдина на сьогодні технологія, що дозволяє ефективно реалізувати динамічну адаптацію постійного зв’язку на основі оперативного перенаправлення цифрових прийомо-передавальних променів з метою адекватного реагування на зміни тропосфери.
Група променів, що синтезується, наприклад по алгоритму швидкого перетворення Фур’є, або за допомогою класичних процедур дискретного Фур’є аналізу, є по суті сукупністю «просторово-частотних фільтрів», кожен з яких пропускає строго визначений набір сигналів і подавляє інші, одночасно приймаємих в широкому просторовому секторі як перешкоди.
Для реалізації такого підходу необхідно суттєво переглянути традиційні технологічні рішення, на яких раніше базувалося створення ФАР. На відміну від схемотехніки ФАР, в кожному приймальному каналі ЦАР замість фазоповертачів встановлюються АЦП, що виконують багаторозрядне квантування по рівню і дискретизації по часу.
В схемі приймального сегмента ЦАР передбачено аналогове формування в приймальних каналах квадратурних складових прийнятих сигналів з відцифровкою кожної із квадратур окремим АЦП.
При цьому розводка тактуючих сигналів на всі АЦП здійснюється від єдиного задаючого генератора, для того щоб усі перетворювачі спрацювали строго синхронно по розкриву ЦАР.
Сукупність цифрових відліків напруг багатосигнальної суміші через високошвидкісний інтерфейс поступає на процесор формування характеристик направленості, що орієнтує максимум променя «вторинного канала» на максимальний сигнал від кореспондента. Тим самим здійснюється первинна просторова селекція синалів від кореспондента. Далі отримані відгуки «вторинних каналів» незалежно обробляються канальними процесорами, виконуючи виділення каналів із змінною смугою пропускання, квадратурно-фазову демодуляцію сигналів і декодування повідомлень по встановленому стандарту.
Функціонування канальних процесорів має певну особливість, а саме відліки сигналів поступають не в темпі аналого-цифрового перетворення, а з необхідним інтервалом для виконання операції цифрового фазового перетворення.
Для узгодження темпів діаграмоутворення (сотні кГц) з періодом дискритизації АЦП (десятки-сотні МГц) необхідно використовувати цифрові фільтри, які будуть накопичувати в жорстко відведених інтервалах часу (стробах) відліки сигналів, отриманих з виходів АЦП. Крім проріджування інформаційного потоку без втрат в енергетиці, такий принцип обробки дозволить декоррелювати шуми, провести додаткову частотну селекцію, підвищити відношення сигнал/шум за рахунок когерентного додавання напруг сигналів суміші. Крім того, сам процес синтезу променів шляхом їх зваженого фазованого додавання, подібно цифровій фільтрації, супроводжується нарощуванням миттєвого динамічного діапазону системи (для 128 елементної антенної решітки Thuraya приріст потужності може складати ![]() дБ), що служить базою для досягнення високої перешкодозахищеності і якості зв’язку.
дБ), що служить базою для досягнення високої перешкодозахищеності і якості зв’язку.
Розрахунок малошумлячого підсилювача потужності
Малошумлячий підсилювач застосовується для підвищення чутливості радіоприймального пристрою [13]. Найбільш важливими електричними параметрами МШП являється:
- коефіцієнт шуму N МШП або шумова температура Т МШП ;
- резонансний коефіцієнт підсилення К р МШП ;
- ![]()
![]()
![]()
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 13. Шумові температури і коефіцієнти шуму різних типів МШП в залежності від частоти: 1 – КПП; 2 – ПДП; 3 – ПНП охол. 20 К; 4 – ППТ охол. 20 К; 5 – ПНП охол. 78 К; 6 – ПНП неохол.; 7 – ПТД; 8 – ППТ неохол.; 9 – ПБТ неохол.; 10 – ЛБХ; 11 – змішувачі на ДБШ
Іншими характеристиками, які враховують при визначенні можливості і доцільності використання МШП, являється: потужність насичення по входу Р нас , при якій амплідудна характеристика МШП стає нелінійною; стабільність параметрів при впливі різних дестабілізуючих факторів, маса і габаритні розміри.
В таблиці 1 приведені основні дані МШП, що працюють в НВЧ діапазоні, на різній елементній базі. На рис. 13 зображено графіки залежності шумової температури і коефіцієнта шуму, різних типів МШП від частоти.
Таблиця 1. Основні дані малошумлячих підсилювачів на НВЧ
| Тип підсилювача |
Частота, ГГц |
Смуга, % |
Підси-лення на каскад, дБ |
Темпера-турна нестабі-льність, дБ/град. |
Часова неста-біль-ність, дБ/12 год. |
Динаміч-ний діапазон, дБ |
Маса, кг |
Об’єм, см3 |
Шумова темпера-тура, К |
| КПУ бігучої хвилі |
1,1…4,0 |
0,12…5,5 (0,2…2,2) |
11…52 (20…30) |
±(0,1…0,2) |
50…80 |
8…400 |
(50…1000) · ·103 |
4…20 |
|
| УДП (4 К) |
1…300 |
4 |
5…20 |
60 |
15…150 |
(50…200) · ·103 |
15…50 |
||
| ППУ охолоджуємі |
0,3…35 |
12 |
15…20 |
15…50 |
|||||
| ППУ неохолоджуємі |
0,3…50 |
0,2…40 (0,5…70) |
3…45 (17…30) |
0,3 |
±(0,1…1) |
65…90 (70…80) |
2…30 |
(1,5…45) · ·103 |
30…300 |
| УПТ (20 К) |
1…20 |
60 |
5…10 |
15…60 |
|||||
| УПТ неохолоджуємі |
0,5…40 |
60 |
5…10 |
50…1000 |
|||||
| УБТ неохолоджуємі |
0,1…16 |
4…80 |
5…10 |
0,04 |
±0,5 |
80…100 |
0,1…0,4 |
45…1800 |
80…5000 |
| УТД неохолоджуємі |
0,25…20 |
1,7…6,7 (3,6…18) |
5…20 (12…20) |
0,001…0,3 (0,02…0,06) |
±0,5 |
50…90 (65…70) |
0,1…12 |
30…27·103 |
250…1200 |
| Підсилювачі на ЛБХ |
0,25…100 |
6,7…120 (36…67) |
25…60 (25…35) |
0,01…0,07 (0,02) |
63…100 (70…90) |
1,2…23 |
450…20·103 |
300…3000 |
Для отримання необхідних характеристик МШП перед розрахунком необхідно правильно вибрати елементну базу на якій буде побудовано МШП, а тому доцільно є розглянути основні підсилювальні елементи на основі яких працюють МШП.
Найменш шумлячими із існуючих підсилювачів являються молекулярні, квантові, парамагнітні підсилювачі – їх шумова температура в сантиметровому діапазоні хвиль порядку 10 К. Однак в КПП необхідно охолоджувати парамагнітну речовину до температури рідкого гелію (4 К), що вимагає використання дорогих кріогенних установок, що обмежує область застосування цього виду підсилювачів.
В широкому діапазоні частот, включаючи міліметрові хвилі можуть бути використані підсилювачі на джозефсонівських переходах, котрі працюють при гелійових температурах. Джозефсонівські переходи з малою ємністю можуть використовуватися для параметричного підсилення слабких НВЧ сигналів, при чому накачкою може слугувати як зовнішнє джерело, так і власна джозефсонівська генерація переходу (самонакачка).
ПДП застосовуються, головним чином, в радіоастрономії, але дуже ефективно використання джозефсонівських переходів в якості нелінійних елементів в схемах змішувачів міліметрового діапазону. ПДП мають найбільш високу частотну межу і володіють шумовою температурою 15…50 К, по шумам лише трохи гірше ніж КПП.
Майже таку шумову температуру мають параметричні напівпровідникові підсилювачі, якщо їх охолодити до температури рідкого азоту (78 К) або водню (20 К), що пов’язано з меншими технічними труднощами. Шумова температура охолоджуємих ПНП порядку 17…20 К при водневому рівні і 50 К при азотному рівні, що дозволяє ефективно їх використовувати в системах супутникового зв’язку. Якщо охолодити ПНП до гелієвої температури можливо отримати практично таку ж шумову температуру, як і в КПП.
Неохолоджуємі ПНП працюють без кріогенної апаратури в широкому діапазоні частот (0,3…50 ГГц), що дозволяє отримати порівняно низькі шумові температури 30…300 К (в залежності від частоти). Ці переваги визначають широке застосування ПНП в радіолокації, супутниковому зв’язку і деяких інших областях радіотехніки.
Останнім часом ПНП починають витісняти підсилювачі на польових і біполярних транзисторах. Особливо велике розповсюдження отримали в інтегральних схемах на НВЧ підсилювачі на польових транзисторах з бар’єром Шоткі на основі арсенід галію. На частотах до 3 ГГц ПБТ майже не поступається за параметрами ППТ, але з підвищенням частоти перевага на боці польових транзисторів. Особливістю ПТШ являється переважно теплова природа його шумів, тому охолодження призводить до значного зменшення коєфіцієнту шуму. ППТ, охолоджені до водневої температури має майже такі шуми, як ПДП і охолоджені ПНП, і в схемному і в конструктивному відношенні значно простіші останніх [10].
Дещо гіршими ніж ПНП і ППТ шумовими властивостями володіють підсилювачі на тунельних діодах, які в сантиметровому діапазоні мають шумову температуру порядку 300 К. ПТД використовують головним чином в сантиметровому діапазоні, хоча можуть працювати в діапазоні від 0,25 до 25 ГГц.
Більш шумлячими, але більш широкосмуговими являються підсилювачі на ЛБХ. В діапазоні від 0,25 до 100 ГГц шумові температури підсилювачів на ЛБХ лежать в межах від 300 до 3000 К.
МШП на ЛБХ являються нерегенеративними, електровакуумними, електронно-променевими підсилювачами, що працюють в прохідному режимі. Підсилення сигналу в ЛБХ відбувається завдяки взаємодії уповільненого електромагнітного поля сигналу і електронного пучка, для фокусування якого застосовуються соленоїди або постійні магніти. Підсилювачі на ЛБХ являються найбільш широкосмуговими, так як в них не використовуються резонаторні системи і їх діапазон обмежується лише пристроями вводу і виводу енергії.
Основними перевагами ЛБХ являються: широкосмуговість (в деяких випадках до 120%); висока стабільність параметрів (крім фазової нестабільності); висока стійкість до перенавантаження НВЧ потужністю (Р=0,2…3 Вт), що дозволяє спростити схему захисту входу приймача і відповідно зменшити втрати на шуми.
Основним недоліком ЛБХ можна вважати відносно високий (для МШП) коефіцієнт шуму, котрий в сантиметровому діапазоні рівний 5…10 дБ і лише трохи менший, ніж у малошумлячих змішувачів; великі габаритні розміри, маса і споживаєма потужність, визначаємі необхідністю в соленоїдах, або в постійних магнітах і в високовольтних випрямлячах від декількох сот вольт (в сантиметровому діапазоні) до 2…3 кВ (в міліметровому діапазоні).
Відповідно застосування ЛБХ доцільно в тих випадках, коли необхідно максимально можливе перекриття по частоті при відносно високому коефіцієнті шуму, великих габаритах та масі і немає жорстких вимог до фазової стабільності і споживаємої потужності [14].
Враховуючи дані, що наведені в таблиці 1, на рис. 13, а також на основі проведеного аналізу підсилювачів в залежності від елементної бази доцільним є проведення розрахунку саме параметричного підсилювача на напівпровідниковому діоді, еквівалентна схема якого приведена на рис. 14.
 |
![]()
![]()
![]()
|
|
|
|
|
|
|
|
||
|
||
б)
Рис. 14. Еквівалентна схема ДПП (а) і його сигнального контуру (б)
Вихідні дані:
- коефіцієнт шуму N МШП 3 дБ;
- резонансний коефіцієнт підсилення К МШП = 15 дБ;
- середня частота пропускання (по рівню 3 дБ) f с0 = 4,5 ГГц;
Розрахунок:
1. Для забезпечення стабільності параметрів підсилювача при вимірюванні імпедансу ланцюгів джерел сигналу (наприклад, антени) і навантаження (наприклад, змішувача) в якості феритового циркулятора застосуємо п’ятиелементний циркулятор, побудований на основі Y-циркулятора. В такому циркуляторі втрати сигналу до входу підсилювача рівні ![]() . На стільки ж ослаблюється підсилений сигнал, поступаючий з підсилювача до виходу циркулятора.
. На стільки ж ослаблюється підсилений сигнал, поступаючий з підсилювача до виходу циркулятора.
Отже, сам підсилювач без циркулятора з врахуванням заданих параметрів повинен мати коефіцієнт шуму ![]() і резонансний коефіцієнт підсилення
і резонансний коефіцієнт підсилення ![]() .
.
3. Оскільки заданий коефіцієнт шуму досить низький і робоча довжина хвилі мала, то для розрахунку доцільно використати параметричний діод D5147G, який має дуже малу сталу часу
та індуктивність вводів ![]() :
:
![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
4. Необхідна напруга зміщення розраховується по формулі:
![]() ( 12)
( 12)
5. Ємність знаходиться по формулі:
![]() ( 13)
( 13)
Сталу часу при робочому зміщенні знаходимо:
![]() ( 14)
( 14)
6. Коефіцієнт модуляції і критичну частоту діода визначаємо по формулам:
 ( 15)
( 15)
 ( 16)
( 16)
7. Поправочний коефіцієнт ![]() , враховуючи втрати в конструкції підсилювача приймаємо рівним
, враховуючи втрати в конструкції підсилювача приймаємо рівним ![]() . Тоді знаходимо
. Тоді знаходимо
![]()
![]() ,
,
еквівалентний опір втрат
![]() ,
,
а динамічну добротність діода визначаю по формулі:
![]()
![]() .
.
8. Оптимальне відношення частот визначаємо по формулі:
![]()
![]() ,
,
а відповідний йому мінімальний коефіцієнт шуму
 ,
,
![]() ,
,
при цьому вважаємо, що фізична температура діода рівна нормальній температурі навколишнього середовища, тобто Т
д
=Т
0
=290 К. розраховане значення ![]() задовольняє вимогам
задовольняє вимогам ![]() .
.
9. Визначемо значення холостої частоти ![]() . Для того, щоб отримати максимально можливу смугу пропускання підсилювача, не застосовуючи спеціальних елементів для її розширення, і спростити топологічну схему підсилювача, в якості холостого контура використовуємо послідовний контур, утворений ємністю
. Для того, щоб отримати максимально можливу смугу пропускання підсилювача, не застосовуючи спеціальних елементів для її розширення, і спростити топологічну схему підсилювача, в якості холостого контура використовуємо послідовний контур, утворений ємністю ![]() та індуктивністю вводів
та індуктивністю вводів ![]() діода. Ланцюг струму холостої частоти замкнено розімкнутим чвертьхвильовим шлейфом, що підключений паралельно діоду і має вхідний опір близький до нуля. В цьому випадку на холостий контур не впливають ланцюги сигналу і накачки, а також ємність корпусу діода
діода. Ланцюг струму холостої частоти замкнено розімкнутим чвертьхвильовим шлейфом, що підключений паралельно діоду і має вхідний опір близький до нуля. В цьому випадку на холостий контур не впливають ланцюги сигналу і накачки, а також ємність корпусу діода ![]() . Резонансна частота цього контуру рівна частоті послідовного резонансу діода
. Резонансна частота цього контуру рівна частоті послідовного резонансу діода
![]() .
.
10. При цьому відношення частот ![]() , а частота накачки
, а частота накачки
![]() .
.
11. Розрахунок коефіцієнта шуму підсилювача отиманим значенням ![]() дає практично ту ж величину
дає практично ту ж величину ![]() , що і при оптимальному відношенні частот
, що і при оптимальному відношенні частот ![]() . Цей результат обумовлений тим, що в нашому розрахунку значення
. Цей результат обумовлений тим, що в нашому розрахунку значення ![]() і
і ![]() досить близькі, а крива залежності
досить близькі, а крива залежності ![]() має тупий мінімум.
має тупий мінімум.
1 «Холодний» КСХ сигнального ланцюга підсилювача, який вимагається забезпечити для отримання резонансного підсилення визначається по формулі:
![]() ( 17)
( 17)
![]() .
.
Звідси знаходимо необхідний опір джерела сигналу ![]() , що приведено до зажимім нелінійної ємності послідовній еквівалентній схемі
, що приведено до зажимім нелінійної ємності послідовній еквівалентній схемі
![]() ;
; ![]() .
.
Розраховані значення ![]() і
і ![]() забезпечують підбором узгоджуючих елементів сигнального ланцюга підсилювача, що зазвичай виконується експерементально.
забезпечують підбором узгоджуючих елементів сигнального ланцюга підсилювача, що зазвичай виконується експерементально.
13. Розрахуємо смугу пропускання П пу , для чого задамося коефіцієнтами включення ємності в холостий м вкл х і сигнальний м вкл с контури. Оскільки холостий контур має найпростішу структуру і реалізується на зосереджених елементах діода і чвертьхвильовому розімкнутому шлейфі, можна сподіватися на досить добре включення ємності в контур і прийняти м вкл х = 0,5. Сигнальний контур має більш складну структуру, так як на ряду з елементами холостого контуру включає в себе ємність корпусу діода С кон , узгоджуючі шлейфи і шлейф, режектуючий частоту накачки. Виходячи з цього, будемо мати на увазі м вкл с = 0, Тоді отримаємо полосу пропускання:
![]() ( 18)
( 18)
![]() ,
,
яка задовільняє вимогам.
14. Визначемо необхідну потужність накачки підсилювача. Для
![]() , а n
=2 i q
=0,4
, а n
=2 i q
=0,4
і розрахуємо потужність накачки, що розсіюється в діоді по формулі:
![]()
![]()
![]()
Для частоти ![]() інтерполяцію значення коефіцієнта
інтерполяцію значення коефіцієнта ![]() знаходимо
знаходимо ![]() , а потужність накачки, яку необхідно підвести до підсилювача визначаємо по формулі:
, а потужність накачки, яку необхідно підвести до підсилювача визначаємо по формулі:
![]()
![]() .
.
Отже розрахунок МШП довів правильність вибору підсилювального елемента і виконання поставлених вимог [14].
Висновки
1. Розроблена схема приймача з цифровою обробкою інформації, і висунуті вимоги до нього. Проведено аналіз аналого-цифрового перетворювача і висунуті вимоги до цього важливого елемента приймального тракту.
Проведено порівняльний аналіз фазованої антенної решітки і цифрової антенної решітки. Обґрунтовано доцільність використання цифрових антенних решіток в якості антенного пристрою перспективної тропосферної станції.
3. Проведено аналіз елементної бази малошумлячого підсилювача і розраховано параметричний підсилювач на діодах для його використання в якості малошумлячого підсилювача. Це дозволить знизити коефіцієнт шуму та підвищити чутливість приймача.