Защита от средств слежения за автомобилями
СОДЕРЖАНИЕ: Классификация и характеристика систем автоматического определения местоположения. Методы местоопределения по радиочастоте и навигационного счисления. Системы поиска и слежения: GPS-приемники, радиоконтроль и пеленгование. Варианты защиты от слежения.Министерство образования Российской Федерации
Томский университет систем управления и радиоэлектроники
(ТУСУР)
Кафедра РЗИ
ЗАЩИТА ОТ СРЕДСТВ СЛЕЖЕНИЯ ЗА АВТОМОБИЛЕМ
Пояснительная записка к курсовой работе
по дисциплине «Инженерно-техническая защита информации»
Выполнили:
студенты группы 188
___________П.В. Дергачев
__________А.В. Дементьев
Руководитель:
Доцент каф. РЗИ
_____________А.П. Бацула
Томск
Реферат
Пояснительная записка, 48 страниц, 12 рисунков, 8 источников, 4 приложения СИСТЕМЫ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, GPS, ПЕЛЕНГАЦИЯ, НАВИГАЦИОННОЕ СЧИСЛЕНИЕ, СИСТЕМА ПОИСКА И СЛЕЖЕНИЯ, ДИСКО-КОНУСНАЯ АНТЕННА.
Предметом данной курсовой работы являлось рассмотрение существующих систем и методов поиска, слежения, определения местоположения мобильных объектов. В работе были рассмотрены некоторые способы защиты от слежения и предложен собственный вариант защиты от слежения за автомобилем УАЗ – 462, на котором установлены скрыто GPS-приемник, принимающий сигнал со спутника и передатчик использующий канал сотовой связи.
Работа выполнена в текстовом редакторе MicrosoftWord 97.
Томский Государственный Университет Систем Управления и Радиоэлектроники
Кафедра радиоэлектроники и защиты информации
УТВЕРЖДАЮ
Зав. кафедрой РЗИ, профессор
_____________ В.Н. Ильюшенко
«____»_____________ г.
ЗАДАНИЕ
на курсовую работу
по дисциплине «Инженерно-техническая защита информации»
Тема работы «Защита от средств слежения за автомобилями»
Исполнители – студенты гр. 188 Дергачев Павел Викторович, Дементьев Андрей Васильевич.
Цель работы: рассмотреть существующие системы и методы поиска, слежения, определения местоположения мобильных объектов, способы защиты от слежения, предложить собственный вариант защиты автомобиля УАЗ-462 при скрытой установке GPS-приемника и передатчика GSM.
Содержание: В работе рассматриваются системы и методы поиска, слежения, определения местоположения мобильных объектов, оборудование для поиска и слежения, способы защиты от слежения, предлагается собственный вариант защиты автомобиля УАЗ - 462, в ходе рассмотрения которого производится расчет некоторых параметров функционирования данной системы.
Источники разработки: 1.- В.И. Андрианов, А.В. Соколов Автомобильные охранные системы – Санкт-Петербург, BHV Арлит, 2000 г. – 272 с.;2.- http://www.ci.ru; 3.- http://www.globaltracer.ru;4.-http://skit.unets.ru;5.-http://www.sec.ru;6.- М.С. Жук, Ю.Б. Молочков Проектирование антенно-фидерных устройств – Москва, издательство «Энергия», 1966 г. – 648 с.;7.- А.С. Лавров, Г.Б. Резников Антенно-фидерные устройства – Москва, «Советское радио», 1974 г. – 368 с.;8.- А.Л. Драбкин, В.Л. Зузенко, А.Г. Кислов Антенно-фидерные устройства – Москва, «Советское радио», 1974 г. – 536 с.;
Руководитель курсовой работы Задание получили
Доцент каф. РЗИ А.П. Бацула _______________
_______________ _______________
Дата выдачи «___»_________ г. Срок сдачи работы «___»_________ г.
Содержание
Введение
1 Системы автоматического определения местоположения (АОМ)
1.1Классификация и характеристика систем АОМ
1.2Системы на базе методов приближения
1.3Методы местоопределения по радиочастоте
1.3.1 Методы радиопеленгации
1.3.2 Методы радионавигации
1.4 Методы навигационного счисления
2 Навигационные системы поиска и слежения
3 Оборудование систем поиска и слежения
3.1 GPS-приемники
3.2 Комплекс аппаратно-программных средств GPS-Monitor
3.3 Комплексы радиоконтроля и пеленгования Савой
4 Предложение системы защиты от слежения за автомобилем
Заключение
Список использованных источников
Приложение А Классификация методов и AVL-систем
Приложение В Мозаика – блокиратор сотовых телефонов
Приложение С Схема расположения антенны
Приложение D Инструкция по правилам перевозки ценных грузов
Введение
В настоящее время во всем мире намечается значительный рост интереса к системам, обеспечивающим автоматизацию контроля за перемещением автотранспорта. Будучи на начальном этапе прерогативой спецслужб и небольшого числа коммерческих организаций, занимающихся транспортировкой особо ценных грузов, в настоящее время, благодаря совершенствованию технологий и снижению цен, эти системы становятся доступны и экономически эффективны для использования в самых разных отраслях, включая коммерческие грузоперевозки, общественный транспорт и цели рядового потребителя.
В последнее время широкое распространение во всем мире получили системы и комплексы технических средств определения местоположения подвижных объектов. Эти системы используются на море, суше и в воздухе для слежения за объектами, определения их местоположения, корректировки маршрута и т. д. Они различаются по методам определения координат объектов, способам передачи информации между подвижными объектами и диспетчерскими пунктами, логикой построения и т. п. Однако во всех этих системах должно выполняться условие — возможность для потребителя самостоятельно определять ее основные параметры:
- зону работы системы;
- тип транспорта, который требуется контролировать;
- частоту обновления информации о подвижном объекте;
- перечень задач, решаемых в системе.
Но существует также и проблема, которая крайне актуальна для государственных правоохранительных органов, частных структур безопасности и диспетчерских служб предприятий различных форм собственности - определение местоположения автомашин, других транспортных средств, ценных грузов злоумышленниками, то есть вторжение в личную жизнь, попытка незаконного получения информации конфиденциального характера или государственной тайны. Задачу по предотвращению подобной ситуации приходится решать в процессе управления и контроля перемещения подвижных объектов, обеспечения безопасности автомашин, сопровождения транспортных средств, ценных грузов и т. д.
1 Системы автоматического определения местоположения (АОМ)
Современные системы автоматического (автоматизированного) определения местоположения транспортных средств — AVL (AutomaticVehicleLocationsystem), выполняющие эти задачи, автоматически определяют координаты транспортного средства в группе ему подобных по мере его перемещения в пределах определенной территории. Система AVL обычно состоит из подсистемы определения местоположения, подсистемы передачи данных и подсистемы управления и обработки данных.[1]
1.1 Классификация и характеристика систем АОМ
По территории охвата системы определения местоположения транспортных средств условно можно подразделить (рис. 1.1) на следующие зоны покрытия:
- глобальную, которая охватывает земной шар, материки или территории нескольких государств;
- региональную, ограниченную, как правило, границами населенного пункта, области, региона;
- локальную (зональную) — рассчитанную на малый радиус действия (территория города, области), что характерно в основном для систем дистанционного сопровождения и поиска угнанных автомобилей.
С точки зрения реализации функций местоопределения системы AVL характеризуются такими техническими параметрами, как точность местоопределения и периодичность уточнения данных. Очевидно, что эти параметры во многом зависят от зоны действия AVL -системы. Чем меньше размер зоны действия, тем выше должна быть точность местоопределения. Так, для локальных систем, действующих на территории города, считается достаточной точность местоопределения (называемая также зоной неопределенности положения) от 100 до 200 м. Некоторые специальные системы требуют точности до единиц метров, для глобальных систем бывает достаточно точности до единиц километров. Периодичность уточнения данных может колебаться от нескольких минут до часов.
Глобальная зона покрытия обычно требуется для контроля международных перевозок, и расстояния между подвижным объектом и диспетчерским пунктом могут быть в несколько тысяч километров. Поэтому наиболее приемлемое решение для реализации системы подобного масштаба — использование спутников: каналов связи. Системы спутниковой подвижной связи, применяемые для цели контроля подвижных объектов, в свою очередь, можно разделить на системы:
- на базе геостационарных спутников;
- на базе низко - и среднеорбитальных спутников.
Основная масса систем контроля дальних перевозок основана на использовании геостационарных спутников. Это системы Inmarsat, OmniTracs, EutelTracs, Prodat и другие. Рассмотрим некоторые из них более подробно.
Система Inmarsat, базируясь на геостационарных спутниках, обеспечивает передачу информации между подвижным объектом и диспетчерским пунктом на всей территории земного шара, за исключением приполярных областей. Время доставки информации в системе составляет 5—15 минут в зависимости от организации диспетчерского пункта. Для контроля дальних перевозок такое время доставки информации вполне приемлемо, и период обновления информации о состоянии контролируемого объекта выбирается обычно в 1 час.
Выпускается несколько видов абонентских терминалов, которые с учетом специфики применения отличаются функциональными возможностями. В комплект подвижного объекта обычно входит:
- спутниковая станция;
- совмещенная Inmarsat/GPS антенна;
- бортовой компьютер;
- набор датчиков.
Габариты мобильного комплекта таковы, что он без проблем устанавливается даже на легковой автомобиль. Бортовой компьютер обеспечивает автоматическую передачу навигационной информации на диспетчерский пункт по запрограммированной временной сетке или при возникновении нештатной ситуации (срабатывание датчика температуры, тревожной кнопки и т. д.). Точность местоопределения составляет около 100 м.
Система EutelTracs с точки зрения потребителя, имеет схожие с Inmarsat характеристики компонентов. Состав мобильных терминалов и функциональные возможности систем практически одинаковы, но они используют различные частотные диапазоны. Мобильный терминал системы EutelTracs по своим размерам больше подходит для установки на грузовые машины.
Системы на базе низкоорбитальных спутников, такие, например, как Iridium, Orbcomm, предоставляют те же услуги, что и геостационарные системы. Основное их отличие друг от друга состоит в том, что первые состоят из низкоорбитальных спутников с небольшой высотой орбиты (меньше 1000 км). Для потребителя это означает, что их спутниковые терминалы имеют меньшие размеры и невысокие цены.
Система Iridium имеет глобальную зону покрытия за счет большого количества космических аппаратов — 66. Она предполагает большой перечень услуг:
-телефонная связь;
-передача алфавитно-цифровых сообщений на пейджер;
-переадресация вызова;
-конференц-связь;
-передача факсимильных сообщений;
-голосовая почта и др.
Система Orbcomm предназначается, в основном, для автоматизированного сбора информации о состоянии объектов, предоставления услуг электронной почты, решения навигационных задач.
К системам, обеспечивающим региональную зону покрытия, относятся системы контроля подвижных объектов, в которых объекты не удаляются от диспетчерского пункта дальше фиксированного расстояния (обычно не более 1000 км). В этих системах требуется поддерживать голосовую связь между объектом и диспетчером, оперативно доставлять информацию о местоположении и состоянии транспортных средств. Достаточно условно в этот разряд можно отнести системы на базе:
-транковой (транкинговой) связи;
-сотовой связи;
-коротковолновой связи.
Системы на базе транковой связи могут покрывать значительные площади, позволяя осуществлять «автороуминг» и «автопатчинг», то есть в них, за счет связи отдельных ретрансляторов в единую логическую структуру, потребитель избавляется от необходимости заботиться о переключении радиочастотных каналов при перемещении в рамках всей системы. В мире и в России развернуты и эксплуатируются транковые системы различных стандартов: SmartTrunk, MPT 1327, LTR, SmartZone, EDACS и др.
Системы на базе сотовой связи все более завоевывают рынок России. Многие фирмы выпускают оборудование и предлагают законченные системы. Широкое применение этих систем сдерживают высокая цена бортового комплекта и проблемы перегрузки системы связи.
Наряду с тем, что у многих сложилось впечатление о ненадежности связи на коротких волнах из-за влияния множества факторов на ее качество, коротковолновая связь, тем не менее, позволяет осуществлять передачу данных по каналу с высокой степенью надежности и с достаточно высокой скоростью. Это основано на сочетании современных технологий и достаточного количества резервных радиочастот.
Наиболее интересны в этом направлении разработки австралийских фирм Coden и Barret. Радиостанции этих фирм имеют встроенный механизм автоматического поиска канала связи, обеспечивающий решение задачи нахождения канала наилучшего прохождения сигнала в течение всего сеанса связи. Для передачи цифровой информации предусмотрен встроенный модем.
Системы локальной зоны покрытия работают, как правило, в радиусе до 100 км и чаще всего используются для обеспечения внутригородских перевозок и поиска угнанных автомобилей. В таких системах могут использоваться системы космической, сотовой, транковой и коротковолновой связи отдельно друг о друга или в различных сочетаниях.
По своему назначению AVL можно разделить на системы:
- диспетчерские;
- дистанционного сопровождения;
- восстановления маршрута.
Диспетчерские системы — это системы, в которых осуществляется централизованный контроль в определенной зоне за местоположением и перемещением подвижных объектов в реальном масштабе времени одним или несколькими диспетчерами, находящимися в стационарных оборудованных диспетчерских центрах; это могут быть системы оперативного контроля перемещения патрульных автомашин, контроля подвижных объектов, системы поиска угнанных автомобилей.
Системы дистанционного сопровождения — это системы, в которых производится дистанционный контроль перемещения подвижного объекта с помощью специально оборудованной автомашины или другого транспортного средства; чаще всего такие системы используются при сопровождении ценных грузов или контроле перемещения транспортных средств.
Системы восстановления маршрута — это системы, решающие задачу определения маршрута или мест пребывания транспортного средства в режиме последующей обработки на основе полученных тем или иным способом данных; подобные системы применяются при контроле перемещения транспортных средств, а также с целью получения статистических данных о маршрутах.
В том случае, когда требование получения информации в реальном масштабе времени не является обязательным, одной из наиболее дешевых систем контроля подвижных объектов является использование бортового накопителя параметров движения транспортных средств. Последний работает в режиме «черного ящика», т. е. осуществляет запись координат точек маршрута движения с указанием времени их прохождения, а также фиксирует дополнительную телеметрическую информацию, например, температуру в рефрижераторе, расход топлива, факты открывания дверей фургона и т. д.
Для зональных диспетчерских систем идеальной может считаться получение данных о местоположении подвижного объекта до одного раза в минуту. Системы дистанционного сопровождения требуют большей частоты обновления информации.
Конкретные реализации AVL-систем часто включают в свой состав технические средства, обеспечивающие несколько способов определения местоположения.
Методы определения местоположения, используемые в AVL-системах, по классификации можно разбить на три основных категории:
- методы приближения (зоновые);
- методы навигационного счисления;
- методы определения местоположения по радиочастоте.[1,2]
Примерная классификация методов и на их основе систем AVL приведена в Приложении А.
1.2 Системы на базе методов приближения
Для определения местоположения подвижного объекта на территории города создается сеть контрольных зон. Это достигается с помощью использования достаточно большого количества дорожных указателей или контрольных пунктов (КП1 — КПn ), точное местоположение которых в системе известно (рис. 1.2). Местоположение транспортного средства определяется по мере прохождения последним зон действия этих пунктов. Индивидуальный код каждого контрольного пункта передается при этом по радиоканалу в бортовую аппаратуру транспортного средства, которая, в свою очередь, через подсистему передачи данных передает эту информацию, а также свой идентификационный код в подсистему управления и обработки данных. Таким образом, реализуется метод прямого приближения. Данные о местоположении транспортного средства выводятся на экран мониторов диспетчерского пункта (возможно отображение на карте местности). Достоверность получаемой информации во многом зависит от количества и расположения контрольных пунктов.
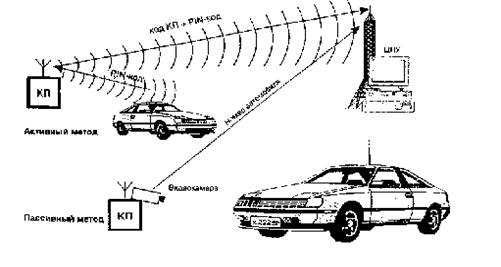
Рисунок 1.3 – Метод инверсного приближения
Однако на практике чаще используется инверсный метод приближения (рис. 1.3): обнаружение и идентификация транспортных средств осуществляется с помощью установленных на них активных, пассивных или полуактивных маломощных радиомаяков, передающих на приемник контрольного пункта свой индивидуальный код, или же с помощью оптической аппаратуры считывания и распознавания характерных признаков объекта, например, автомобильных номеров. Информация от контрольных пунктов передается далее в подсистему управления и обработки данных.
Очевидно, что для зоновых систем точность местоопределения и периодичность обновления данных напрямую зависит от плотности расположения контрольных пунктов на территории действия системы. Методы приближения требуют развитой инфраструктуры связи для организации подсистемы передачи данных с большого числа таких пунктов в центр управления и контроля, а в случае использования оптических методов считывания — требуют и сложной аппаратуры, используемой на всех контрольных пунктах, и поэтому весьма дороги при построении систем, охватывающих большие территории. В то же время, инверсные методы приближения позволяют минимизировать объем бортовой аппаратуры — радиомаяка, либо вовсе обойтись без устанавливаемой на автомашину аппаратуры. Основное применение данных систем — комплексное обеспечение охраны автомашин, обеспечение поиска автомашин при угоне. Примером подобной системы является система КОРЗ, обеспечивающая фиксацию приближения угнанной оборудованной автомашины к посту—пикету ГИБДД. Во многих зарубежных странах зоновые системы функционируют уже длительное время, как для нужд диспетчеризации общественного транспорта, движущегося по постоянным маршрутам, так и для нужд правоохранительных органов.[1]
1.3 Методы местоопределения по радиочастоте
Местоположение транспортного средства определяется путем измерения разности расстояний транспортного средства от трех или более относительных позиций.
Данную группу методов можно условно разбить на две подгруппы:
- радиопеленгация (обобщенно), когда абсолютное или относительное местоположение подвижного объекта определяется при приеме излучаемого им радиосигнала сетью стационарных или мобильных приемных пунктов;
- вычисление координат по результатам приема специальных радиосигналов на борту подвижного объекта (методы прямой или инверсной радионавигации).[1]
1.3.1 Методы радиопеленгации
С помощью распределенной по территории города сети пеленгаторов или с помощью мобильных средств пеленгации возможно отслеживание местоположения объектов, оборудованных радиопередатчиками-маяками.
На практике метод пеленгации, как наиболее дешевый в начальные годы становления систем спутниковой навигации (когда стоимость спутниковых приемников измерялась тысячами долларов), был опробован полицейскими и пожарными службами США и Канады. Результаты опытной эксплуатации системы показали, что ома может очень хорошо использоваться на открытой местности. Однако данная система имеет большие погрешности в условиях плотной городской застройки. Кроме того, стоимость инфраструктуры, необходимой для охвата значительной площади, весьма велика. В настоящее время этот метод используется очень редко.
Примером AVL-системы, основанной на методах радиопеленгации, можно считать систему ГИПС (новое название — СКИФ). Принцип работы системы заключается в следующем. Прием сигнала, излучаемого малогабаритным радиомаяком на подвижном объекте, осуществляется сетью стационарных радиоприемных центров, и по полученным данным производится с помощью математических операций определение местоположения автомашины с наибольшей вероятностью. Применение широкополосных сигналов с базой 103 –108 обеспечивает частоту обновления информации один раз в секунду в системе из 5000 объектов при высокой помехозащищенности. Точность местоопределения зависит от плотности размещения стационарной радиоприемной сети на территории города и может составлять единицы метров в режиме непрерывного слежения и корректировки данных по электронной карте.
Подобную систему с применением пейджеров двухсторонней связи и сети приемопередающих станций предлагает фирма «МегаПейдж». Широкополосный передатчик, установленный на автомашине, включается по сигналу стандартного пейджингового приемника либо по сигналу системы противоугонной сигнализации. Определение местоположения передатчика осуществляется с помощью сети базовых станций пейджинговой системы.
Примером системы на базе мобильных пеленгаторов является хорошо известная по телевизионным шоу-программам канала НТВ — система LoJack. Пеленгаторами данной системы оборудованы автомашины специального батальона дорожно-постовой службы ГИБДД и посты-пикеты ГИБДД на выезде из Москвы и ряда других городов.[1]
1.3.2 Методы радионавигации
Космическая радионавигация воплотила в себе новейшие достижения компьютерных и телекоммуникационных технологий. Симбиоз спутниковой системы позиционирования, современной радиосвязи и электронной картографии позволяет определять местоположение и скорость транспортного средства, вычислять расстояния, прокладывать маршруты и отслеживать их соблюдение, получать справки о картографических объектах. Сегодня работают две системы: американская Navstar и отечественная ГЛОНАСС. Использование обеих систем позволяет более точно определять координаты и повышает надежность функционирования.
Методы на основе радионавигации реализуются в системах AVL на основе импульсно-фазовых наземных навигационных систем (типа LORAN-C, Чайка) и спутниковых среднеорбитальных навигационных систем (СРНС) Navstar и ГЛОНАСС. Наилучшие точностные и эксплуатационные характеристики в настоящее время имеют спутниковые навигационные системы, в которых достигается точность местоопределения в стандартном режиме не менее 50—100 м, а с применением специальных методов обработки информационных сигналов в режиме фазовых определений или дифференциальной навигации — до единиц метров.
Самой известной является глобальная спутниковая радионавигационная система Navstar (NavigationSystemusingTimingAndRanging) или GPS (GlobalPositioningSystem), созданная для высокоточного навигационно-временного обеспечения объектов, движущихся в космосе, воздухе, на земле и воде.
В ее состав входят навигационные спутники, наземный комплекс управления и аппаратура потребителей (пользователей). Применяемый в системе принцип состоит в том, что специальные приемники, установленные у потребителей, измеряют дальность до нескольких спутников и определяют свои координаты по точкам пересечения поверхностей равного удаления.
Дальность вычисляется по формулам, известным из школьных учебников, путем умножения скорости распространения радиосигнала на время задержки, при прохождении им расстояния от спутника до пользователя. Величина временной задержки определяется сопоставлением кодов сигналов, излучаемых спутником и генерируемых приемным устройством, методом временного сдвига до их совпадения. Временной сдвиг измеряется по часам приемника. Координаты спутников известны с высокой точностью. Для нахождения широты, долготы, высоты, исключения ошибок часов приемника достаточно решить систему из четырех уравнений. Поэтому приемник пользователя должен принимать навигационные сигналы от четырех спутников.
Скорость определяется по доплеровскому сдвигу несущей частоты сигнала спутника, вызываемому движением пользователя. Доплеровский сдвиг (Dopplershift) замеряется при сопоставлении частот сигналов, принимаемых от спутника и генерируемых приемником. Разумеется, все это происходит мгновенно и без какого либо участия пользователя.
Навигационные сигналы излучаются на двух частотах L-диапазона (полоса радиочастот 390-1580 МГц):
частота L1 - 1575,42 МГц;
частота L2 — 1227,6 МГц.
На частоте L2 излучаются сигналы с военным кодом Р(Y) с высокоточной информацией (precision — точный, или protected — защищенный), защищенным от имитационных помех.
Р-код представляет из себя последовательность псевдослучайных бистабильных манипуляций фазы несущей частоты (CarrierFrequency) с частотой следования, равной 10,23 МГц и периодом повторения в 267 суток. Каждый недельный сегмент этого кода является уникальным для одного из спутников GPS и непрерывно генерируется им в течение каждой недели, начиная с ночи с субботы на воскресенье.
На частоте L1 излучаются сигналы и с военным кодом P(Y), и с общедоступным гражданским кодом (CivilianCode), который часто называют C/A (ClearAcquisition – код свободного доступа). Прием сигнала по коду P(Y) обеспечивает работу в режиме PPS (PrecisePositioningService – высокая точность измерений). Сравнение времени прихода сигналов на частотах L1 и L2 позволяет вычислять дополнительную задержку, возникающую при прохождении радиоволн через ионосферу, что значительно повышает точность измерений навигационных данных.
Прием на частоте L1 с кодом C/A не позволяет определить ошибки, вносимые ионосферой. Структура кода C/A обеспечивает худшие характеристики в режиме SPS (StandartPositioningService – стандартная точность измерений). Так, если в режиме PPS с вероятностью 0,95 ошибки измерения широты и долготы не превышают 22-23 метра, высоты 27-28 метров и времени 0,09 мкс, то в режиме SPS они увеличиваются соответственно до 100, 140 метров и 0,34 мкс. Среднеквадратическая ошибка определения долготы и широты в режиме PPS составляет не более 8 метров, а в SPS – не более 40 метров. Министерство обороны США, исходя из интересов национальной безопасности, осуществляет «искусственное» ухудшение точности в режиме S/A (SelectiveAvailability – ограниченный доступ). Первоначально режим SPS был необходим для грубого определения пользователем своих координат при вхождении в код P(Y). В настоящее время уровень электроники, программного обеспечения и методов обработки навигационной информации позволяет осуществлять достаточно быстрый захват P(Y) без кода C/A, а также проводить высокоточные определения сигнала по фазе несущей. Кроме того, полностью отработанный наземный автоматический режим дифференциальной коррекции (DifferentialPositioning), позволяет в ограниченном регионе получать точное определение относительных координат взаимного расположения двух приемников, отслеживать сигналы одних и тех же спутников GPS. К примеру, штатные системы навигации транспорта, при использовании гражданского C/A кода определяют координаты автомобиля с точностью от 2 до 5 метров.
Отечественная навигационная система ГЛОНАСС (советская навигационная система Ураган) аналогична по своему построению американской, но имеет более высокую точность определения координат потребителя.
Впервые в России высококлассные GPS – системы, интегрированные с современными связными и картографическими комплексами, были поставлены компанией «Прин» в 1995 году в Инкомбанк, в специальные подразделения Министерства по чрезвычайным ситуациям, некоторые коммерческие структуры. Они были предназначены для оперативного контроля и управления транспортом в пределах города и региона. Кроме того, реализуются проекты для контроля за транспортом на любых расстояниях с использованием GPS и глобальной системы мобильной связи Inmarsat.
Достоинствами данного метода являются глобальность местоопределения, что позволяет применять его практически на любых территориях и трассах любой протяженности, хорошая точность, возможность определить положение объекта не карте местности, способность определять не только координаты, но и высоту, скорость и направление движения объекта, высокая степень совместимости с автоматизированными системами обработки информации. Не случайно у подобных систем самая широкая область применения. Это системы диспетчеризации городского и специального транспорта, обеспечения безопасности транспорта и материальных ценностей, работающие в реальном масштабе времени на территории города с десятками и сотнями подвижных объектов. Это системы контроля маршрутов транспорта, осуществляющего дальние междугородние и международные перевозки (с передачей информации о маршруте с помощью глобальных систем связи типа Inmarsat или с пассивным накоплении информации о маршруте с последующей обработкой).[1]
1.4 Методы навигационного счисления
Данные методы определения местоположения транспортных средств основаны на измерении параметров движения автомашины с помощью датчиков ускорений, угловых скоростей в совокупности с датчиками пройденного пути и датчиками направления и вычислении на основе этих данных текущего местоположения подвижного объекта относительно известной начальной точки. В целом данные методы могут использоваться в тех же системах, что и методы, основанные на радионавигации. Основное их преимущество по сравнению с методами радионавигации — независимость от условий приема навигационных сигналов бортовой аппаратурой. Не секрет, что на территории современного города с плотной застройкой высокими зданиями могут встречаться участки, где затруднен прием сигналов от наземных и даже спутниковых навигационных систем. На таких участках бортовая навигационная аппаратура не в состоянии вычислить координаты подвижного объекта. Приемные антенны радионавигационных систем должны размещаться на автомашинах с учетом обеспечения наилучших условий приема навигационных сигналов. Это делает их уязвимыми для злоумышленников в случае применения для нужд охраны автомашин или перевозимых ими грузов. Существующие методы камуфлирования (маскировки) приемных антенн достаточно сложны и дороги.
Методы счисления пути и инерциальной навигации свободны от этих недостатков, поскольку аппаратура полностью автономна и может быть интегрирована в конструктивные элементы автомашины с целью затруднения их обнаружения и защиты от умышленного вывода из строя. Недостатками методов навигационного счисления можно считать:
- необходимость коррекции параметров движения из-за накапливаемых ошибок измерения;
- достаточно большие, в целом, габариты бортовой аппаратуры;
- отсутствие доступной малогабаритной элементной базы для создания бортовой аппаратуры (акселерометров, автономных вычислителей пройденного пути, датчиков направления);
- сложность обработки параметров движения.
Наиболее перспективным направлением применения подобных методов можно считать их совместное использование с радионавигационными методами, что позволит скомпенсировать недостатки, присущие как одному, так и другому методу. Систему местоопределения с использованием данного метода предлагает ЗАО «Автонавигатор». В бортовом оборудовании системы используются:
- датчик пути, подключаемый к спидометру автомашины;
- датчик направления на основе феррозондов, измеряющих отклонение оси;
- автомашины от магнитного меридиана Земли;
- датчик ускорения (акселерометр), обеспечивающий устранение ошибок феррозондового датчика, возникающих из-за негоризонтального расположения объекта относительно поверхности Земли.
Корректировка ошибок счисления производится по цифровой векторной карте полилиний транспортной сети города, что позволяет достичь точности местоопределения до единиц метров. Имеется возможность использования элементов бортового оборудования совместно с приемником GPS.[1]
2 Навигационные системы поиска и слежения
Из-за сложного экономического положения охраны и недостаточного финансирования служб навигационного обеспечения отечественные космические системы определения координат различных потребителей отошли на второй план. Этим воспользовались зарубежные фирмы, между которыми развернулась жесткая борьба за овладение российским рынком.
В последнее время навигационные системы безопасности и поиска, в которых используются сотовая связь и технология GPS, становятся отдельным направлением в автомобильной электронике. Они не только демонстрируют «чудеса техники», но и позволяют снизить расходы на страхование и обеспечивают быстрый поиск угнанного автомобиля.
В настоящее время системы поиска автомобилей продолжают развиваться. В них используются новейшие достижения в области навигации и информационных технологий, возможности и достижения военно-промьшленного комплекса.
Структурно схемы автоматического контроля можно разделить на следующие функциональные подсистемы:
- определение координат объекта на местности;
- передача данных;
- обработка и отображение результатов.
Для определения координат объектов в различных системах используются следующие методы:
- автоматическая пеленгация кодированных радиомаяков, установленных на автомобилях;
- установка на автомобилях навигационных приемников систем GPS или ГЛОНАСС;
- прием специальной аппаратурой, установленной на автомобилях, маломощных сигналов маркеров, обозначающих контрольные точки маршрута.
Во всех службах, где внедряется спутниковая навигация, снижаются эксплуатационные затраты, повышаются безопасность перевозок грузов и дисциплина экипажей. GPS позволяет мобильным подразделениям оперативных и муниципальных служб стать более «боеспособными» без увеличения количества транспорта и личного состава за счет эффективного использования имеющихся ресурсов.
Системы спутниковой навигации, оборудование которых для потребителей в последние годы значительно подешевело, являются основным применяемым методом при поиске и слежении. В подавляющем большинстве случаев системы контроля за перемещением подвижных объектов используют приемники системы Navstar(GPS), так как они наиболее распространены и дешевы. Намечающаяся перспектива появления умеренных по цене двухсистемных приемников GPS/GLONASS может в ближайшее время «подключить» отечественную систему ГЛОНАСС. Она имеет на настоящий момент целый ряд очевидных преимуществ для активного использования в рассматриваемых системах контроля.
Ввиду того, что в системе Navstar до сих пор активирован режим SelectiveAvailability («Ограниченная доступность»), искусственно ухудшающий точность определения координат приемниками гражданского применения, в системах, использующих GPS, часто используется метод дифференциальной коррекции, обеспечивающий повышение точности определения координат. Он основан на учете при вычислениях дополнительной информации (передаваемой по дополнительному каналу связи) о состоянии атмосферы и внесенных в сигнал спутников погрешностей.
Для передачи информации с мобильных объектов о местоположении может быть использован целый ряд методов. Наибольшее число систем использует для передачи данных радиостанции (обычные или транковые), оснащенные дополнительными модемами. Существуют также системы, использующие сотовую связь (AMPS в Америке и GSM в Европе) и спутниковые каналы связи (Inmarsat, Гонец).
Попробуем выделить в общем виде типичные функции и выгоды от использования современных систем контроля за транспортом (AVL). При рассмотрении приведенного ниже списка необходимо учитывать, что некоторые немаловажные (для какого-то конкретного случая) детали могут быть упущены и некоторые из приведенных функций могут не поддерживаться аппаратными либо программным обеспечением систем, имеющихся на рынке.
Задачи, решаемые с помощью навигационных систем поиска и слежения за подвижными объектами, выглядят следующим образом:
- постоянная и достоверная информация о местонахождении каждого из автомобилей в реальном времени с записью протокола и возможностью последующего анализа;
- упрощение работы диспетчера и снижение его загрузки, что снижает вероятность принятия им ошибочного или несвоевременного решения;
- наглядное картографическое отображение местности с наложением маркеров, указывающих положение автотранспорта; тип маркера и его цвет могут отражать как тип машины, так и ее состояние (свободна, занята, исправна и т.д.);
- возможность автоматического контроля за незапланированными остановками автотранспорта, а также за выездом автотранспорта за пределы установленной рабочей зоны, что в значительной мере может содействовать снижению риска хищений материальных средств или нецелевого использования автотранспорта;
- возможность оперативной помощи водителям, потерявшим ориентацию, в выборе оптимального маршрута;
- возможность автоматизированного поиска ближайшей к заданной точке машины с возможностью дифференциации по заданным признакам, например, ближайшей свободной машины, ближайшей машины с определенным оборудованием);
- при наличии датчиков сигнализации и исполнительных устройств - своевременное оповещение диспетчера об угоне автотранспорта и возможности его дистанционного блокирования (например, дистанционным включением клапана, перекрывающего бензопровод); дальнейшие действия охраны правопорядка могут быть значительно облегчены ввиду наличия точной информации о местонахождении угнанного автомобиля;
- возможность оборудования автомобиля «тревожной кнопкой» и (или) датчиком столкновения для автоматической передачи сигнала о чрезвычайной ситуации и координат происшествия;
- возможность эффективной координации действий с грузополучателем и обеспечение своевременной разгрузки либо переадресации груза по возможности его приема на заранее запланированном объекте (что особенно важно при перевозке скоропортящихся грузов, например, бетона высоких марок или некоторых пищевых продуктов);
- уменьшение бесполезного пробега автотранспорта из-за просчетов в организации перевозок, связанных с неполной информацией о реальной обстановке, имеющейся у диспетчера;
- повышение эффективности использования имеющегося автотранспорта и персонала за счет более четкой организации их работы и снижении потребности в дополнительных машинах;
- упрощение контроля за реальным пробегом каждой из единиц автотранспорта и оценки реальных затрат при анализе экономической эффективности перевозок;
- большой объем объективной информации для анализа с целью выработкой наиболее рациональных маршрутов, совершенствования системы управления и т.п.;
- возможность автоматизированного контроля за наступлением срока регламентного обслуживания автотранспорта и более эффективного планирования его использования с учетом этой информации.
Для решения вышеперечисленных задач разработаны и применяются на практике так называемые системы слежения за движением транспортных средств AVLS (AutomaticVehicleLocationSystem) или APRS (AutomaticPositionReportingSystem). Работа этих систем строится по следующему принципу. В автомобиле устанавливается бортовой комплект аппаратуры, состоящий из GPS-приемника с выносной антенной, блока управления (контроллера), интерфейса (модема) и радиоприемника/передатчика (рис. 2.1). GPS-приемник регистрирует сигналы спутника и определяет текущее местоположение автомобиля. Контроллер в соответствии с заданной программой направляет эти данные через интерфейс (модем) на передатчик, который, в свою очередь, посылает в эфир сигналы. Эти сигналы напрямую или через сеть ретрансляторов (репитеров) поступают на приемник, находящийся на диспетчерском пульте, а затем — на вход персонального компьютера, снабженного специальной программой. Теперь диспетчер может увидеть текущее местоположение конкретного автомобиля на карте, получить дополнительную информацию с установленных на автомобиле датчиков (включен или выключен двигатель, закрыты ли двери и т.п.) и, более того, послать сигнал, управляющий установленными в автомобиле механизмами — например, заглушающими двигатель, закрывающими замки дверей или включающими сирену. Последнее, в сочетании со скрытой, защищенной от умышленного вывода из строя установкой бортовой аппаратуры — прекрасное, средство борьбы с угоном автомобилей. При необходимости водитель может нажать кнопку тревоги — и компьютер тут же сообщит об этом диспетчеру и покажет на карте место, откуда подан сигнал. На каком же удалении от диспетчерскогопульта может осуществляться подобный контроль? Это зависит исключительно от дальности связи, то есть от выбора средств телекоммуникации. Если система использует прямой радиоканал на выделенной частоте, радиус зоны охвата составляет 5-15 км. Если в вашем распоряжении транковый канал связи, то рабочая область системы совпадает с зоной охвата транкового оператора и составляет около 15 км в радиусе от базовой антенны. Многообещающие перспективы открывает использование в качестве средства связи сотового телефона, имеющего, например, режим передачи данных. В этом случае, особенно с учетом междугороднего и международного автоматического роуминга, зона охвата может составлять сотни километров. В Западной Европе, где сети стандарта GSM 900 и 1800 покрывают почти всю территорию, большинство разработчиков AVL - систем используют именно этот вид связи. В России, где интерес к подобным системам только зарождается, разработчики до недавнего времени были вынуждены ориентироваться только на транковую связь, изначально позволявшую передавать данные. Теперь же и российские операторы стандарта GSM стали предоставлять услуги по обмену цифровыми данными с помощью протокола SMS (короткие текстовые сообщения). Возможно, что уже в ближайшем будущем автотранспорт не сможет обходиться без системы GSM.
Различают следующие базовые варианты построения таких систем навигации:
- мобильный вариант персонального пользователя;
- мобильный диспетчерский вариант;
- мобильный автономный вариант.
Мобильный вариант системы для персонального пользователя включает в себя GPS – приемник с антенной, персональный компьютер для отображения текущего местоположения объекта на электронной карте местности и решения ряда оперативных задач (выбор оптимального маршрута, захват, прохождение по заранее заданному маршруту и т. д.), определяемых заказчиком системы.
Мобильный диспетчерский вариант — модификация первого варианта, дополненная возможностью передачи по, радиоканалу телеметрии о расположении объекта или группы объектов на диспетчерский пункт или несколько пунктов через систему цифровых ретрансляторов.
Наличие бортового компьютера непосредственно на подвижном объекте необязательно. Возможна работа нескольких объектов на одной частоте (оптимальное количество объектов на одном канале — 10—20) по принципу временного разделения телеметрических данных с различных машин. На диспетчерском пункте происходит отображение движения объекта по электронной карте местности. При этом возможно дополнение системы различной сервисной поддержкой: сигналы о сходе с маршрута, остановке, передача информации о состоянии узлов транспортного средства (при установке дополнительных датчиков) и т. п.
Мобильный автономный вариант представляет собой компактное устройство — «черный ящик». Он устанавливается в одном из укромных мест на автомобиле и фиксирует во встроенной памяти маршрут объекта в течение всего времени движения. После прохождения маршрута осуществляется считывание информации с устройства и маршрут восстанавливается на электронной карте. В силу того, что объем памяти последней ограничен, координаты месторасположения заносятся в ОЗУ по срабатыванию датчика движения или временному принципу.[1,2,3]
3 Оборудование систем поиска и слежения
3.1 GPS -приемники
Новое время ставит перед навигационным оборудованием новые задачи - высокая точность, удобство в использовании, надежность и способность удовлетворить запросы любого потребителя. Все это и даже больше может обеспечить наш навигационная система GPS — глобальная система определения координат, которая представляет собой сложнейший технический комплекс, состоящий из 24-х высокоорбитальных спутников, наземных станций управления, и, наконец, самих GPS-приемников.
В любое время и при любых погодных условиях приемник GPS весьма точно определяет местоположение объекта, где бы тот ни находился. Он не только вычислит координаты, скорость движения, но и позволит достаточно просто проходить по уже известному маршруту, вычислять расстояния между точками пути и многое другое.
Другой немаловажной функцией GPS является роль приемника сигналов точного времени. Внутренние часы работающего GPS-приемника постоянно сверяются с рубидиевыми эталонами времени, установленными на борту спутников. Таким образом, имея навигационный приемник системы GPS, вы одновременно имеете и хронометр, который непрерывно корректируется по сверхточным атомным часам.
После определения путевой координаты, которая представляет собой специальным образом структурированные данные, хранящиеся в памяти прибора, можно вычислить расстояние до необходимой точки курса и направление движения. Кроме того, одновременно можно получить оценку отклонения. Это позволяет получать полную картину того, на сколько и в каком направлении вы отклонились от курса.
«Сердцем» системы GPS является группа высокоорбитальных спутников, непрерывно передающих сигналы с информацией о точном времени и собственных координатах спутника в каждый момент времени. Принимая сигналы от нескольких спутников и сопоставляя момент их прихода с внутренними часами (которые также корректируются на основе анализа информации, полученной со спутников), приемник определяет расстояние до спутников, на основе чего с высокой точностью вычисляет свои собственные координаты. Точность определения отчасти зависит от количества принимаемых спутников. Для определения 2D-координат достаточно принять сигнал стрех спутников, для 3D-навигации необходимо принять сигналы как минимум с четырех спутников. Прибор также сообщает вам оценку точности проводимых им измерений в абсолютных или условных единицах.
Процесс определения координат приемником выглядит примерно так:
a) при включении приемника после достаточно долгого перерыва (т.н. холодный старт), приемник начинает принимать сигнал со спутников и определять, какие именно спутники из всей группировки доступны из этого местоположения. Группа спутников, видимых в данной точке называется альманахом. После выключения, приемник некоторое время держит в памяти последний альманах и в случае повторного включения после кратковременного перерыва, время фиксации приемника существенно возрастает (горячий старт).
b) Приемник, получая со спутников точное время (которое последние четко синхронизируют между собой), по задержкам вычисляет физические расстояния до них (скорость распространения радио-волны известна). Имея в видимости три или более спутника, приемник методом триангуляции, очевидно, получает возможность определить свое точное положение в 2D-пространстве. Имея в видимости четыре или более спутника, приемник может также определить и высоту абонента над уровнем моря, которая, правда, вычисляется с заведомо большей погрешностью, чем координаты на земной поверхности.
Любой приемник GPS может быть отнесен по методу приема сигналов к какому-либо из трех типов:
- многоканальному;
- мультиплексному;
- последовательному.
Многоканальные приемники обладают целым рядом преимуществ в случаях высоких скоростей подвижного объекта или его заметного ускорения, а также при первом определении местоположения объекта.
Наиболее простые модели GPS-приемников имеют обычные двух-четырех-строчные матричные индикаторы, на которых могут быть показаны цифры и элементарная графика.
Более сложные (в смысле общения с пользователем) устройства имеют графические дисплеи, размеры которых колеблются от малых до средних. Действительно, хотя цифровые индикаторы и могут сообщить вам необходимую информацию, возможность графического отображения является существенным преимуществом. Графические дисплеи демонстрируют вам указатели курса, диаграмму слежения, более четкие характеристики и другую полезную информацию. Удобный постраничный интерфейс позволяет выбирать на дисплее GPS-приемника страницу с необходимой в данный момент информацией.
В настоящее время появились GPS-приемники с графическим дисплеем, которые позволяют отображать текущие координаты на фрагменте карты местности.
Существуют также некоторые модели GPS-приемников, вообще не имеющие собственного индикатора и предназначенные для использования в качестве датчика координат для компьютерной системы навигации. Эти же приемники часто используются в качестве сверхточных часов для систем, требующих строгой синхронности в работе аппаратуры, находящейся в удаленных точках.
Ряд приемников имеет встроенный стандартный интерфейс для связи с внешним оборудованием и вычислительными средствами, который используете в тех случаях, когда приемник работает в составе различных навигационных комплексов.
Для максимальной чувствительности, а следовательно точности, приемнику GPS нужен «чистый горизонт». Автомобиль, дремучий лес, пасмурная погода (дождь, снег) весьма сильно ослабляют уровень принимаемого сигнала, в самых неблагоприятных условия можно совсем «потерять» спутники. Чтобы этого не случилось, существуют внешние антенны, которые крепятся на крышу. И при покупке нужно отдавать предпочтение тем, у которых есть возможность подключения внешней антенны.
Наиболее удачным вариантом является использование удлинителя, позволяющего переставить на крышу автомобиля штатную антенну. Так можно избежать покупки дорогостоящей внешней антенны.
Все, что хранится в памяти GPS-приемника можно перенести в память компьютера, отредактировать и отправить обратно. Помимо этого, можно печатать и сохранять на диске для использования в дальнейшем - емкость памяти GPS - приемника все же не очень велика.
Можно обойтись и без использования электронных карт, проведя вечерок за вычислением координат и вбиванием в GPS основных точек предполагаемого маршрута (мосты, броды, просеки и другие важные ориентиры). Но карты на этом CD, позволяют делать большее. При использовании ноутбука в машине и покупке картриджа можно получить отображение вашего местоположения (маршрута) в реальном времени на экране.
Все функции которые были описаны, — это обобщение разных моделей GPS, примерный набор нормального, современного GPS-приемника.[1,3]
3.2 Комплекс аппаратно-программных средств GPS - Monitor
Одной из последних российских разработок является комплекс аппаратно-программных средств GPS-Monitor, обладающий по своим характеристикам рядом преимуществ перед аналогичными зарубежными образцами и позволяющий получать данные о мобильном объекте в реальном масштабе времени с использованием в качестве среды передачи данных сети GSM-900.
Суть системы состоит в том, что мобильный объект, снабженный специальным оборудованием, принимает сигналы с навигационных спутников Navstar с высокой точностью вычисляет собственные координаты, а также скорость и направление движения и передает их на базовый диспетчерский центр. В диспетчерском центре данные обрабатываются и выдаются на монитор в виде мнемонических отметок на электронной карте местности. Причем, картографические программы, используемые в данной системе, позволяют получать различную степень детализации: от масштаба области или страны до масштаба улиц и домов. Возможности системы GPS-Monitor позволяют не только принимать данные от мобильного объекта, но и передавать команды на него, например «ЗАБЛОКИРОВАТЬ ДВИГАТЕЛЬ», «ВЫДАТЬ ТЕКУЩЕЕ ПОЛОЖЕНИЕ», «ВЫДАТЬ ПОСЛЕДНИЕ ВОСЕМЬ ТОЧЕК» и т.п.
Система спроектирована таким образом, что допускает скрытую установку всех блоков, имеет встроенную цепь электронной блокировки, что позволяет использовать комплект автономно без подключения к сигнализации автомобиля. Тем не менее, существует возможность легко интегрировать его в уже установленную сигнализацию. Ряд технических усовершенствований позволяют снизить потребляемый в режиме ожидания ток почти в два раза. Контроль за обрывом в цепи GSM-антенны позволяет повысить надежность и мобильного комплекта. Применение специализированного GSM-модуля позволило обеспечить высокую помехозащищенность и криптостойкость всей системы в целом и мобильного комплекта, в частности. А разработанный специально для этих целей контроллер позволяет гибко модифицировать мобильный комплект под конкретные требования пользователя. Относительно небольшие габариты комплекта (114x79x33 мм), допускают его установку в любом месте автомобиля. Применение специальных высокоёмких резервных батарей питания обеспечивает непрерывную работу модуля в аварийном режиме в течение 60 мин. Удобство чтения электронной карты города и возможность самостоятельно модифицировать комплект и изменять в зависимости от конкретной ситуации позволяет диспетчеру быстро оценивать сложившуюся оперативную обстановку с целью принятия конкретного решения.
Использование в качестве среды передачи данных сети GSM-900 позволяет получить максимальную зону охвата территории при минимальных затратах.
В состав системы GPS-Monitor входят:
- мобильный комплект;
- антенна GPS, совмещенная с антенной GSM;
- GSM-модем;
- базовое картографическое обеспечение.
В состав системы входят так называемые «серая» и «красная» кнопки. Нажатие любой из них вызывает немедленную передачу соответствующего сообщения на диспетчерский центр с указанием текущих координат. Например, одной из функций «серой» кнопки может быть выдача сообщения «НЕОБХОДИМА ТЕХПОМОЩЬ». Активация «красной» кнопки может задействовать сообщение «ПОДВЕРГСЯ НАПАДЕНИЮ».
Технические характеристики комплекса:
Точность позиционирования, м………………………………………….20-50
Одновременное сопровождение мобильных объектов………………..до 1000
Напряжение питания, В ………………………………………………...10-30
Потребляемый ток, мА:
в режиме сопровождения………………………………………………150
в режиме sleep………………………………………………………….. 20
в режиме передачи…………………………………………………….. 1000
Время работы от резервных батарей в активном режиме, мин …………. 60
Температурный диапазон, °С……………………………………— 40…+80
Габаритные размеры, мм:
мобильного комплекта GSM………………………………………. 114x79x33
модема………………………………………………………………….150x60x20
GPS+GSM антенны……………………………………………………120x70x10
Среднее время от момента снятия координат до момента их получения в диспетчерском центре, с …………………………7
Кроме того, комплекс имеет встроенную цепь блокировки, два универсальных входных порта для подключения датчиков, а также поддерживает двунаправленный режим обмена данными и возможность дистанционного программирования и изменения параметров системы.
Возможности системы мониторинга подвижных объектов GPS-Monitor по сравнению с другими системами, использующими иные принципы опрёделения местоположения или пеленга транспортного средства:
- выдача данных о географических координатах, скорости, направлении движения подвижного объекта;
- работа в реальном времени в разных городах одновременно;
- компактность и скрытность установки на любое транспортное средство;
- интеграция с уже установленными на машине противоугонными системами;
- выдача координат мобильного объекта с высокой точностью;
- не только прием данных от мобильного объекта, но и управление установленными на объекте устройствами (датчиками);
- гибкое программирование под конкретные требования заказчика;
- не требует какой-либо специальной инфраструктуры для своего функционирования (дополнительных ретрансляторов, радиомаяков, датчиков на светофорах и т. п.);
- не только наблюдение за объектом, но и, в случае необходимости по команде с диспетчерского центра остановка объекта с выдачей точных координат его местонахождения;
- работа в любых погодных условиях и в условиях радиопомех.[1]
3.3 Комплексы радиоконтроля и пеленгования Савой
Комплексы радиоконтроля и пеленгования Савой выполняются в стационарном, мобильном и быстросъемном переносном вариантах. Поставляемые изделия успешно прошли заводские и эксплуатационное испытания. Эти комплексы уже применяются в технических службах УВД, управлениях Госсвязьнадзора и других заинтересованных организациях. Комплекс состоит из стационарного комплекса радиоконтроля Савой-С, мобильной оперативной станции радиоконтроля Савой-МО, переносного пеленгатора Савой-НП.
Базовый стационарный комплекс радиоконтроля Савой-С имеет следующие характеристики:
- контролируемая площадь не менее 150 км2 (определяется количеством пеленгаторных постов);
- диапазон частот пеленгования — 25-1000 МГц;
- инструментальная точность пеленгования не хуже 2°;
- точность пеленгования в квадрате 7x7 км с вероятностью 0,9 — не более 300 м;
- диапазон частот обнаружения 20-2300 МГц при скорости панорамной перестройки 0,5 МГц/с (4,МГц/с);
- радиоперехват с возможностью записи информации в оцифрованном виде
на жесткий диск;
- ведение архива с возможностью поиска, сортировки, статистической обработки, распечатки и передачи информации по запросам;
- количество постов пеленгования — 3 и выше (определяется контролируемой площадью);
- количество постов управления — 1;
- электронная карта местности.
Дополнительные аксессуары:
- неограниченное количество пеленгаторных постов;
- мобильная станция пеленгования;
- переносной пеленгатор;
- картографическая станция, позволяющая производить изготовление электронных карт в растровом виде;
- станция активного предупреждения несанкционированных источников излучения и другие средства.
Мобильная станция радиоконтроля Савой-М предназначена для ведения оперативного контроля за работой источников радиоизлучения в городских и полевых условиях и выполняет следующие задачи:
- топографическую привязку к местности с введением курсового угла;
- обнаружение источников радиоизлучения, пеленгование и местоопределение источников радиоизлучения с их отображением на карте;
- ведение архива по всем источникам с возможностью поиска, сортировки, статистической обработки, документирования.
Оборудование мобильной станции радиоконтроля компонуется на микроавтобусах типа «УАЗ», «Газель» или на других транспортных средствах. Работа ведется как на стоянке, так и в движении. База местоопределения составляет 2-3 км.
Технические характеристики мобильной станции:
- диапазон частот поиска и обнаружения — 20—2300МГц;
- инструментальная точность пеленгования — не хуже 5°;
- диапазон частот системы местоопределения — 25-1000 МГц;
- скорость обмена информацией между постами по радиоканалу (в случае соединения в комплекс) — 1200 Бод;
- точность местоопределения в квадрате 33 км тремя постами с вероятностью 0,9 – 300 м;
- обмен с постами асинхронный, запросный, режим работы постов пеленгования и обнаружения — параллельный;
- работа в приводном режиме до выхода на объект;
- диапазон частот станции активного предупреждения о наличии несанкционированных источников излучения определяется типом радиостанции.
Мобильная оперативная станция радиоконтроля Савой-МО предназначена для ведения оперативного контроля за работой источников радиоизлучения в городских и полевых условиях и выполняет следующие задачи:
- топографическую привязку к местности с введением курсового угла;
- обнаружение источников радиоизлучения, пеленгование и местоопределение источников радиоизлучения с отображением их на карте;
- ведение архива по всем источникам с возможностью поиска, сортировки, статистической обработки, документирования.
При необходимости оперативные станции могут устанавливаться на легкой транспортной базе типа автомобилей «Волга», «Нива», ВАЗ и т. п. Работа ведется как на стоянке, так и в движении. База местоопределения составляет 2-3 км.
- Технические характеристики мобильной оперативной станции:
диапазон частот поиска и обнаружения - 20-2300 МГц;
- инструментальная точность пеленгования — не хуже 5;
- диапазон частот системы местоопределения — 25—1000 МГц;
- скорость обмена информацией между постами по радиоканалу (в случае соединения в комплекс) —1200 Бод;
- точность местоопределения в квадрате 3x3 км тремя постами с вероятностью 0,9 – 300 м;
- обмен с постами— асинхронный, запросный;
- работа в приводном режиме до выхода на объект;
- режим работы постов пеленгования и обнаружения — последовательный;
- диапазон частот станции активного предупреждения о наличии несанкционированных источников излучения определяется типом радиостанции;
Переносной пеленгатор Савой-НП имеет рабочий диапазон частот пеленгования 25-1000 МГц, при инструментальной точности пеленгования не хуже 5 – 7, в диапазоне 25-80 МГц инструментальная точность не нормируется.
Технические характеристики переносного пеленгатора:
- среднеарифметическая ошибка пеленгования в условиях городской застройки —5-7;
- время пеленгования — 300 мс;
- чувствительность в режиме пеленгования — не хуже 30 мкВ;
- чувствительность в режиме обнаружения — не хуже 10 мкВ;
- скорость обнаружения — до 0,5 МГц/с;
- диапазон частот пеленгования — 25-1000 МГц;
- диапазон частот обнаружения — 20-2300 МГц;
- работа в приводном режиме до выхода на объект;
- погрешность местоопределения при работе в составе комплекса и при установке антенно-фидерной системы на высоте не менее 3 м — не хуже 600 м;
- питающее напряжение — 12 В (~ 220 В при использовании дополнительного блока питания);
- аппаратура пеленгатора (без радиостанции и радиомодема) размещается в «кейсе» с размерами 540x420x210 мм и имеет вес 13 кг;
- Антенно-фидерная система скомпонована в радиопрозрачном колпаке диаметром 295 мм, высотой — 140 мм, весом 3 кг.[1]
4. Предложение системы защиты от слежения за автомобилем
Итак, имеется автомобиль УАЗ - 462, перевозящий ценный груз, на котором скрыто установлена система, включающая GPS – приемник и GSM – передатчик и определяющая координаты данного объекта. Необходимо предложить вариант защиты объекта от несанкционированного наблюдения.
Варианта может быть два:
1) поскольку система имеет в своем составе GPS – приемник, который, как известно из рассмотрения систем на базе GPS, имеет внутренние часы, с помощью которых он собственно и определяет координаты (свои и объекта), то первый вариант сводится к нарушению синхронизации данных часов; следствием этого будет неправильное определение координат наблюдаемого объекта, что в принципе не желательно, поэтому этот вариант не совсем приемлем;
2) второй вариант – блокирование канала передачи, в данном случае, мобильной (сотовой связи).
Системы сотовой связи названы так потому, что они организованы по принципу сети. Вся территория разбита на ячейки (соты) в которых с помощью ретрансляторов обеспечивается непрерывная связь аппарата (передатчика) с ретранслятором. Расстояние между ретрансляторами выбирается из соображений обеспечения гарантированности связи. Для GSM 900 это примерно до 50 км на открытой местности и несколько меньше в городе (экранирующее влияние зданий, переотражение сигнала и т.п.). Кроме того, емкость ретранслятора (количество одновременно работающих телефонов) тоже ограничена. В общем, в городе их больше, чем в деревне, а в центре больше, чем на окраинах. Поскольку передатчик перемещается, то сеть отслеживает это перемещение и переключает передатчик с одного ретранслятора на другой. Включенный передатчик (например, сотовый телефон) периодически напоминает ретранслятору о своем наличии даже тогда, когда не происходит передачи информации. Ретранслятор определяет местоположение передатчика и принимает решение - работать с ним дальше или передать на обслуживание соседнему.
Аналоговые системы типа DAMPS измеряют соотношение сигнал/шум на входе приемника (чем дальше передатчик от ретранслятора, тем соотношение хуже). Измерение соотношения производится, скажем, двумя соседними сотами (ретрансляторами) и там, где соотношение лучше, к той соте и подключается аппарат. Точность определения координат невелика и составляет примерно процентов 15 - 20 от размеров соты. Статистический анализ, возможно, улучшает этот показатель до 10 - 12 процентов. Но в целом получаются точность 1,5 - 2 километра на открытой местности и 500 - 1000 метров в городе. Отключение штатной антенны передатчика и применение направленной, с усилением хотя бы 7 - 10 децибел, сильно изменяет точку зрения ретрансляторов на обстановку. Если антенна направляется на ближайший ретранслятор, то он будет думать, что передатчик к нему приблизился, так как соотношение сигнал/шум улучшилось. Ошибка будет определяться величиной усиления антенны и истинным расстоянием до антенны ретранслятора. Чем больше усиление и истинное расстояние, тем больше будет величина ошибки. При этом, качество собственно связи улучшится на величину усиления направленной антенны. Применение направленной антенны в автомобиле приведет к парадоксальным эффектам. При повороте машины диаграмма направленности будет очень резко поворачивать вместе с машиной. Для сети скорость перемещения передатчика, расположенного в машине, будет сравнима со скоростью самолета. Возможно, что у нее будут проявляться сбои, и пропадание связи с автомобилем. Представив изображение передатчика, а, соответственно, и автомобиля, в виде точки на экране дисплея, можно предположить, что эта точка то перемещается прямолинейно, то перепрыгивает через целые городские кварталы. Применений дополнительных усилителей, круговых антенн в плане маскировки своего истинного местоположения мало что дает, так как сигнал при этом будет увеличиваться во всех ретрансляторах одновременно. Все вышесказанное относится и к системе NMT 450. Проблема в том, что использовать эту направленную антенну не получится, поскольку передатчик, будем говорить, «надежно спрятан».
Гораздо сложнее устроена система GSM 900. Она изначально создавалась как цифровая, супернадежная и отличная во всех смыслах от других. На настоящий момент ввести в заблуждение систему определения местоположения абонента связи GSM весьма и весьма сложно. Ретранслятор постоянно излучает длинный, неповторяющийся, цифровой сигнал - эталон. Передатчик (или мобильный телефон) его постоянно принимает и периодически небольшой его кусочек переизлучает. Ретранслятор сравнивает полученный сигнал с эталоном, вычисляет временную задержку и по ней определяет местоположение объекта. Теоретически можно между передатчиком и антенной поставить регулируемую или постоянную линию задержки - внести в систему ошибку. Но физически это невозможно, поскольку не определено место установки и передатчика, и антенны.[5]
Существуют некоторые готовые технические разработки, направленные на блокирование каналов сотовой связи. Примером может являться блокиратор канала мобильной связи «Мозаика» (см. Приложение B).
В качестве собственного предложения рассмотрим также блокирование канала передачи с помощью передатчика, выдающего определенную мощность, и снабженного диско-конусной антенной. Максимальная мощность передатчиков мобильной связи достигает 2 Вт. Чтобы добиться необходимого эффекта необходимо иметь мощность на 10 децибел выше блокируемой.
![]()
![]()
![]()
Необходимая мощность передатчика равна:
![]()
Хотя реально достаточно обеспечить превышение мощности на 3 децибела, поэтому мощность блокирующего передатчика составит:
![]()
Произведем расчет параметров диско-конусной антенны. GSM – передатчики работают на частотах 900 МГц и 1800 МГц, если быть точнее, то в пределах 800 -1000 МГц и 1700 –1900 МГц. Но не будем забывать, что передача может осуществляться и на других частотах, поэтому возьмем полосу пропускания передатчика от 200 до 2000 МГц. Антенна, предназначенная для работы в широком диапазоне волн, должна иметь достаточно большой угол между образующей конуса и осью питающего кабеля: 15 – 30. Питающий кабель – обычно, коаксиальный кабель с волновым сопротивлением 50 – 60 Ом. Питание к антенне подводится следующим образом: центральный провод присоединяется к диску, а наружная оболочка – к конусу в его вершине. Поляризация диско-конусной антенны линейная, меридиональная, то есть вектор E лежит в плоскостях, содержащих ось антенны.
Расчет произведем при следующих параметрах:
=30; d=1.75 см; fmin =200 МГц.
Тогда:
![]()
![]()
![]()
![]()
![]()
Коэффициент усиления диско-конусных антенн находится в пределах 3 дБ (усиление в 2 раза). Рассчитаем поток мощности, создаваемый передатчиком с диско-конусной антенной в кабине автомобиля. Предположительно, антенна располагается на крыше автомобиля, в ее центре, тогда расстояние до кабины (с учетом того, что длина автомобиля составляет 3 метра) порядка 1.5 метра. Поток мощности:
![]()
По нормам величина потока мощности должна быть не более 10 мкВт/см2 , если излучение действует круглосуточно и не более 25 мкВт/см2 , если излучение действует в течение рабочего дня. Для того чтобы выдержать нормы по потоку мощности сместим антенну на некоторое расстояние от кабины. Тогда, если допустить, что излучение действует в течение рабочего дня, расстояние r будет равно:
![]()
То есть, антенна сдвигается на 9,5 см (схема расположения антенны в Приложении C).
Диаграмма направленности диско-конусной антенны теоретически может быть рассчитана с помощью формулы для уголкового отражателя:
![]() проведем расчет на частоте 1 ГГц:
проведем расчет на частоте 1 ГГц:
![]()
![]()
Диаграмма направленности на частоте 1 ГГц будет иметь примерно следующий вид:
![]()
![]()
![]()
Рисунок 1 – Диаграмма направленности диско-конусной антенны на частоте 1 ГГц
Подобная диаграмма при достаточной мощности передатчика перекроет значительную часть пространства внутри автомобиля и обеспечит необходимый результат – зашумление канала передачи. [6,7,8]
Инструкцию по правилам перевозки ценных грузов на транспортном средстве, оснащенном системой противодействия слежения смотреть в Приложении D.
Заключение
Развитие систем слежения за мобильными объектами происходит такими темпами, что это уже начинает вызывать тревогу всех, кому небезразлична тайна личной жизни. Эксперты отмечают возможность двойного назначения подобных технологий, ведь теоретически можно определить местоположение любого мобильного объекта и, соответственно его владельца, а это уже начало вторжения в личную жизнь. Тем более что способы определения положения, основанные на использовании канала передачи сотовой связи, могут выдавать данные непрерывно за считанные секунды. Тем не менее, существует несколько вариантов защиты в подобных ситуациях, один из которых, хотя и на теоретическом уровне, был описан в данной работе.
Список использованных источников
1. В.И. Андрианов, А.В. Соколов Автомобильные охранные системы – Санкт-Петербург, BHV Арлит, 2000 г. – 272 с.;
2. М.С. Жук, Ю.Б. Молочков Проектирование антенно-фидерных устройств – Москва, издательство «Энергия», 1966 г. – 648 с.;
3. А.С. Лавров, Г.Б. Резников Антенно-фидерные устройства – Москва, «Советское радио», 1974 г. – 368 с.;
4. А.Л. Драбкин, В.Л. Зузенко, А.Г. Кислов Антенно-фидерные устройства – Москва, «Советское радио», 1974 г. – 536 с.;
Приложение А
![]() Классификация методов и AVL-систем
Классификация методов и AVL-систем
Приложение B
Мозаика - блокиратор телефонов и передатчиков мобильной связи
Устройство блокирования работы телефонов систем мобильной связи стандартов GSM-900/1800, AMPS/DAMPS, CDMA. Предотвращает возможность использования телефонов мобильной связи на объектах, где существует запрет или ограничение на использование таких средств. Блокирует возможность канала сотовой связи в закладных устройствах(аудио - видео передатчиков)
| Технические характеристики | |
| Диапазон рабочих частот | 840-960МГц;1680-1920МГц |
| Радиус действия (зависит от расстояния до ближайшей базовой станции) | 3 – 15м. |
| Питание изделия | - от сети 220В; |
Приложение С
![]()
![]()
![]()
![]() Схема расположения антенны
Схема расположения антенны
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Рисунок С.1 – Вид сверху
Рисунок С.1 – Вид сверху
r=1.595 м 1
|
|
3
Рисунок С.2 – Вид сбоку
1 – диско-конусная антенна; 2 – подводка питания; 3 – передатчик
Приложение D
Инструкция по правилам перевозки ценных грузов с помощью транспортного средства (ТС), оснащенного системой противодействия слежению
1. ТС, находящееся на стоянке для служебных автомобилей (в гараже, депо) должно быть под наблюдением сотрудников службы охраны предприятия;
2. в случае появления на стоянке (в гараже, депо) посторонних лиц, они должны быть задержаны сотрудниками службы охраны для выяснения причин и целей их нахождения на контролируемой территории;
3. служба охраны ведет журнал отправления и прибытия ТС, перевозящих ценные грузы;
4. ТС обслуживается водителем-механиком;
5. водитель-механик отвечает за перевозку груза из пункта отправления в пункт назначения, ремонт ТС, устранение неисправностей во время движения;
6. водитель не имеет доступа к грузу и не должен знать характер перевозимых ценностей;
7. после начала движения водитель обязан включить безопасный режим;
8. во время движения ТС находится под наблюдением группы сопровождения ценных грузов;
9. группа сопровождения формируется из сотрудников службы безопасности в количестве трех человек, один из которых находится в кабине вместе с водителем, а двое – в легковом автомобиле на расстоянии 50 – 60 метров от ТС, перевозящего ценные грузы;
10. группа сопровождения отвечает за сохранность груза во время перевозки из пункта отправления в пункт назначения и связь с отрядами правоохранительных органов в случае чрезвычайных ситуаций;
11. любая передача из ТС, перевозящего ценные грузы строго запрещается;
12. по прибытии в пункт назначения, груз разгружается под наблюдением группы сопровождения;
13. перед отправлением ТС производится проверка на несанкционированную установку систем слежения, проверка системы противодействия слежению, определяется уровень потока мощности излучения, действующего на кабину водителя (поскольку система защиты может работать непрерывно в течение рабочего дня – 8 часов, то в случае более длительных перевозок необходимо закрывать кабину водителя защитным экраном, чтобы понизить действие вредного излучения).
14. все проверки и обеспечение нормальной, эффективной и безопасной работы системы защиты возлагаются на инженера-техника;
15. кроме инженера-техника никто не имеет доступа к техническим средствам, установленным на ТС;
16. загрузка ценных грузов на ТС производится под наблюдением группы сопровождения, после осмотра инженером-техником всех установленных технических средств;
17. на лиц, допустивших нарушение данной инструкции, будут налагаться административные взыскания;
18. контроль за соблюдением данной инструкции возложить на службу безопасности предприятия;
19. данная инструкция доводится руководителями подразделений, имеющих отношение к ремонту, эксплуатации и оснащению техническими средствами ТС, до подчиненных под роспись.
Директор предприятия ___________