Самолётная радиолокационная станция ЦД-ЗОТ
СОДЕРЖАНИЕ: 1. НАЗНАЧЕНИЕ СТАНЦИИ Самолётная радиолокационная станция ЦД-ЗОТ предназначена для работы в комплексе средств перехвата и поражения (ракетными снарядами РС-2-У) воздушных целей.1. НАЗНАЧЕНИЕ СТАНЦИИ
Самолётная радиолокационная станция ЦД-ЗОТ предназначена для работы в комплексе средств перехвата и поражения (ракетными снарядами РС-2-У) воздушных целей.
Комплекс расположен на истребителе-перехватчике.
Станция обеспечивает:
· автоматический обзор пространства в определённом секторе передней полусферы и обнаружение целей;
· полуавтоматический захват цели и автоматическое сопровождение по дальности и угловым координатам;
· прицеливание посредством индикатора и поражение целей управляемыми ракетными снарядами;
· определение совместно с аппаратурой опознавания государственной принадлежности обнаруженного самолёта.
2. ПРИНЦИПЫ ДЕЙСТВИЯ
Работа станции ЦД-ЗОТ при выполнении боевого задания может быть разделена на 3 этапа:
1. обзор пространства и обнаружение целей;
2. выход на исходную позицию для атаки;
3. атака цели и наведение управляемых ракетных снарядов на цель.
В режиме обзора антенна производит облучение пространства передней полусферы в секторе ± 30 градусов по азимуту и ± 12 градусов по углу места.
По углу места центр сектора обзора может находиться ниже стропильной горизонтальной оси самолёта под углом - 4 градуса, либо - 6 градусов в зависимости от высоты полёта самолёта.
Тактическая схема поиска представлена на рис. I . Перемещение антенного луча в пространстве является результатом сложения трёх простых движений:
1. движения по азимуту вправо и влево равномерной скоростью;
2. скачков по углу места вверх или вниз в конце азимутальной строки;
3. конического сканирования.
При наличии целей в секторе обзора на дальностях до 20 км отраженные высокочастотные сигналы принимаются антенной, преобразовываются и усиливаются приемным устройством, а затем поступают на индикатор типа В (азимут-дальность).
На рис. 2 приводятся изображения целей на экране индикатора в различных случаях. Цели на экране индикатора воспроизводятся в виде горизонтальных яркостных отметок с вертикальными метками. Азимут цели отсчитывается по горизонтали от центра индикатора, а дальность по вертикальной оси от нижней границы растра. Положение цели по углу места отображается вертикальными метками верх, низ, расположенными вблизи отметок целей.
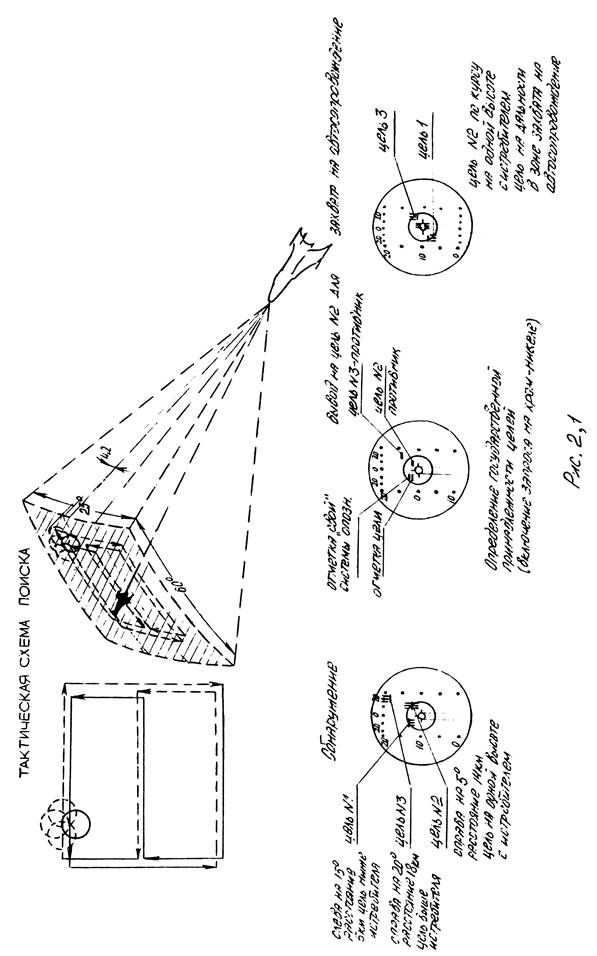
Перед началом атаки летчик должен убедиться в том, что обнаруженный самолет принадлежит к вражеским вооруженным силам. Для этого летчик включает запросчик системы опознавания. В случае, если обнаруженный самолёт принадлежит к своим вооруженным силам, над отметкой цели появляется горизонтальная отметка свой. Отсутствие такой отметки свидетельствует об обнаружении вражеского самолёта. В этом случае летчик маневрирует по курсу и высоте так, чтобы середина отметки цели совместилась с нулем азимута, и чтобы были получены вертикальные метки сверху и снизу горизонтальной яркостной отметки цели.
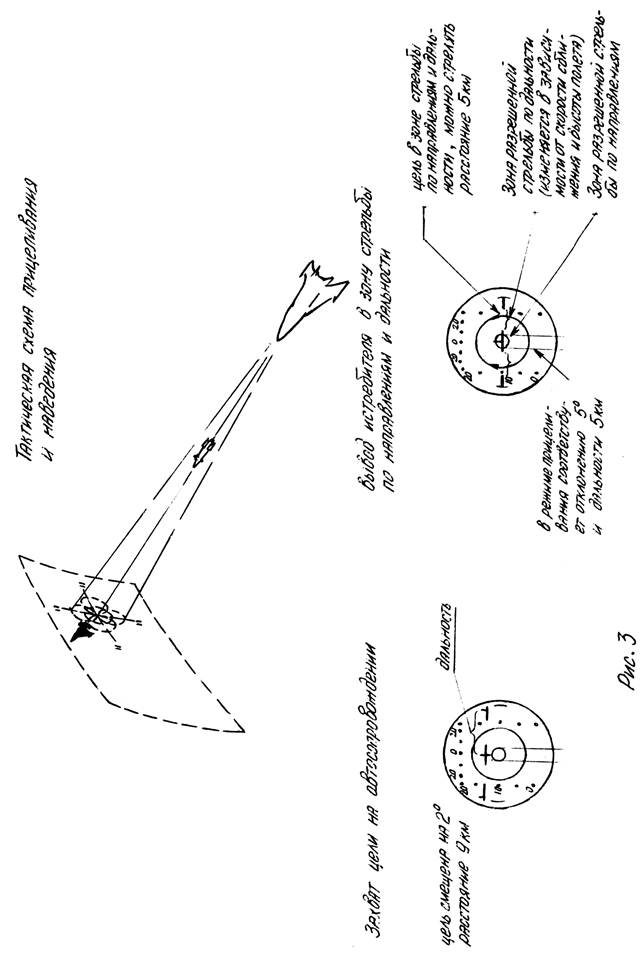
При сближении с целью на дистанцию, не превышающую 10 км и выходе истребителя на цель, так, что она попадает в зону ± 5 градусов по азимуту на средней строке обзора ( т.е. имеются обе вертикальные отметки верх и низ ), летчик производит захват цели.
Для захвата цели лётчик нажимает кнопку Захват на ручке управления самолётом. В результате нажатия кнопки Захват антенна станции прекращает обзор и становится в нуль по азимуту и под углом - 2 градуса к продольной оси самолёта, а автоселектор производит поиск цели по дальности. Если уровень сигнала, отраженного от цели, достаточен для стробирования автомата захвата, то происходит захват цели по дальности и индикатор переключается в прицельный режим. При этом на экране индикатора появляется искусственная отметка цели, представленная на рис. 3 , на котором приведено изображение экрана индикатора станции при работе в прицельном режиме. Кроме искусственной отметки цели на экране появляются две симметричные метки дальности.
После захвата цели, система углового сопровождения автоматически следит по угловым координатам за положением атакуемой цели.
Угловому положению цели в пространстве соответствует положение центра искусственной отметки цели, а дальности перехватчик-цель соответствует расстояние от центра отметки до меток дальности. Дублирование меток дальности необходимо для того, чтобы была возможность определения дальности по одной из них, так как при достаточно большом отклонении центра искусственной откатки цели от центра экрана индикатора другая метка будет за пределами экрана.
Маневром самолёта летчик в режиме прицеливания непрерывно поддерживает центр искусственной отметки внутри малого круга на экране ( радиус круга соответствует одному градусу отклонения). Когда метка дальности входит в зону стрельбы, летчик производит пуск снарядов.
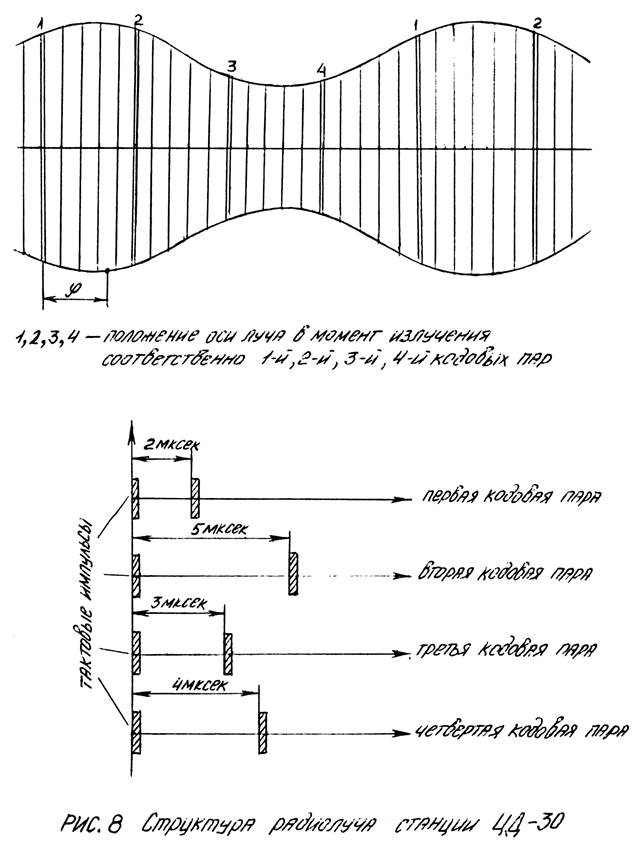
Управление полетом снарядов осуществляется по радиолучу. Для получения на снаряде опорного напряжения станция с момента пуска начинает вырабатывать специальные опорные сигналы -коды, который представлены на рис. 8 . Станция посылает опорные сигналы при положении луча антенны верх-право-низ-лево относительно равносигнальной зоны.
Система выработки кодовых сигналов имеет специальное гироскопическое устройство, которое обеспечивает в режиме нападения снарядов стабилизацию пространственного положения кодов при кренах самолета.
Станция допускает два режима наведения снарядов:
1. Режим наведения снарядов при автоматическом сопровождении цели.
2. Режим наведения снарядов при закрепленном луче.
Режим наведения снарядов с автосопровождением цели используется при стрельбе по одиночной цели независимо от условий видимости при отсутствии помех. Стрельба в этом режиме требует от летчика меньшего внимания к качеству пилотирования во время стрельбы, поскольку станция автоматически следит за положением цели.
Режим наведения с закрепленным лучом используется при наличии активных и пассивных помех, при стрельбе по групповой или низколетящей цели. Стрельба в этом режиме требует от летчика повышенного внимания и непрерывного точного прицеливания по атакуемой цели, поскольку станция не следит за целью.
Равносигнальная линия антенны в этом режиме сопряжена с осью оптического процесса.
В зависимости от обстановки летчик выбирает режим наведения снарядов и переводит станцию из одного режима в другой тумблером Сопровождение - Закрепл. луч - Помеха на пульте управления станцией.
3. СОСТАВ СТАНЦИИ
В состав радиолокационной станции ЦД-ЗОТ входят следующие блоки:
1. Антенный блок.
2. Приемопередающий блок.
3. Приемный блок.
4. Индикатор.
5. Блок развертки.
6. Блок магнитных усилителей.
7. Блок синхронизации.
8. Автоселектор.
9. Блок питания.
10. Блок стабилизации координат.
11. Блок управления антенной.
12. Блок управления.
13. Соединительная коробка.
14. Блок защиты от несинхронные импульсных помех.
15. Блок коррекции по высоте.
Работу станции обеспечивают следующие приборы:
1. Датчик высоты.
2. Преобразователь 36В 400 Гц ПГ-200.
При работе в наземных условиях используется наземный пульт контроля.
4. КРАТКОЕ ОПИСАНИЕ СТРУКТУРНОЙ СХЕМЫ СТАНЦИИ
Структурная схема станции ЦД-ЗОТ изображена на рис. 4 .
Антенный блок - служит для излучения и приема высокочастотных сигналов, а также формирования диаграмм направленности. Здесь расположены двигатель сканирования луча, генератора опорных напряжений и двигатели управления по азимуту и углу места. Высокочастотный сигнал поступает на антенну с магнетронного генератора приемопередающего блока.
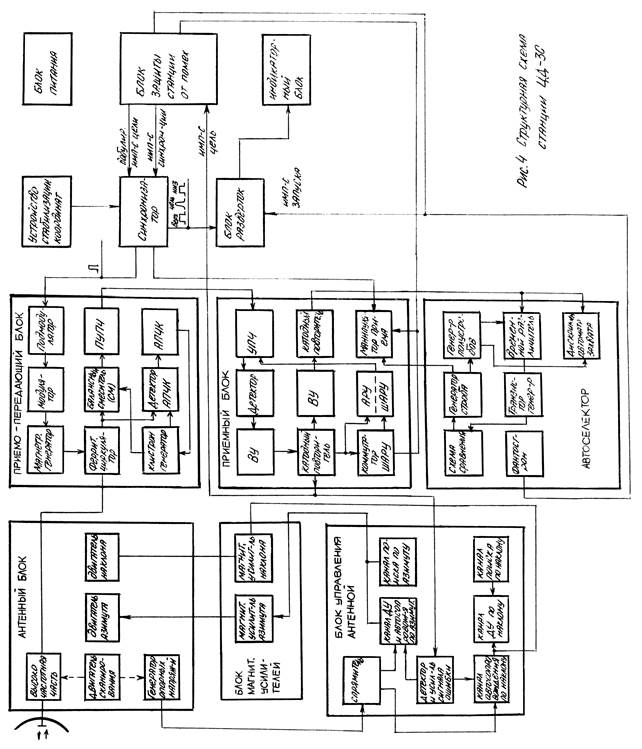
Приемо-передающий блок - осуществляет генерирование мощных высокочастотных импульсов и преобразование высокочастотных импульсов, отраженных от цели, в импульсы промежуточной частоты, а также осуществляет предварительное усиление сигналов на промежуточной частоте. Он состоит из модулятора, управляющего работой магнетронного генератора; смесителя (СМ); предварительного усилителя промежуточной частоты (ПУПЧ); и схемы автоматической подстройки частоты клистронного гетеродина (АПЧК). Сигнал цели с выхода ПУПЧа поступает на приемный блок.
Приемный блок должен обеспечивать:
· усиление отраженных от целей и преобразованных в промежуточную частоту сигналов, их детектирование и выдачу усиленных видеосигналов на индикаторное устройство, автодальномер и блок управления антенной;
· селектирование канала усиления по дальности;
· автоматическую регулировку усиления УПЧ но сигналу цели (АРУ);
· автоматическую регулировку усиления УПЧ по шумам; (ШАРУ)
С выхода приемного блока видеосигналы подаются на следующие блоки:
· на блок защиты;
· дальномер;
· блок управления антенной;
В состав приемного блока входят:
· усилитель промежуточной частоты,
· детектор и видеоусилитель,
· катодный повторитель,
· коммутатор автоматической регулировки усиления по шумам (ШАРУ).
· системы АРУ и ШAРУ
· манипулятор приема, осуществляющий отпирание УПЧ только в момент прихода положительных импульсов ШАРУ или положительных импульсов селектора приема или положительных строб импульсов с автоселектора.
Индикаторный блок (совмещенный индикатор обзора и автосопровождения); предназначен:
· -для визуального обнаружения отметок цели;
· -для прицеливания путем определения по индикатору:
- углов в вертикальной и горизонтальной плоскостях, между направлением на цель и продольной осью самолета;
- дальности до цели,
- зоны пуска.
В индикаторном блоке используется электро-лучевая трубка типа ТЕРЕМ -1.
Блок развертки - управляет работой индикатора и осуществляет:
· выработку в режиме обзора напряжений развертки, необходимых для создания на экране индикатора развертки типа Б;
· выработку в режиме автосопровождения напряжений разверток, необходимых для создания на экране индикатора развертки типа плавающее пятно с третьей координатой – дальность;
· выработку импульса напряжения, длительность и положение которого по развертке дальности и режиме плавающего пятна определяют на экране зону пуска.
· выработку импульсов отпирания, необходимых для нормального функционирования трубки Терем-1.
Блок управления антенной обеспечивает:
· разложение сигналов ошибки в двух взаимно-перпендикулярных плоскостях азимута и наклона.
· усиление и преобразование составляющих сигналов ошибки по осям азимута и наклона в управляющие токи.
· усиление и преобразование сигналов в следящих системах дистанционной установки антенны по осям азимута и наклона.
· формирование сигналов поиска по осям азимута и наклона.
Блок управления антенной состоит из следующих основных элементов:
· цепи выделения сигнала ошибки,
· канала формирования управляющих токов по оси наклона в режиме поиска,
· канала формирования управляющих токов по оси азимута в режима поиска,
· канала формирования управляющих токов по оси азимута в режиме автосопровождения и дистанционной установки (ДУ).
· канала формирования управляющих токов по оси наклона в режиме автосопровождения и ДУ.
Блок управления антенной работает в трех режимах:
1. режим обзора пространства
2. режим автоматического сопровождения цели по углам,
3. режим дистанционной установки антенн, заключающееся в установке антенны в определенное положение при нажатии датчиком кнопки дист. установка (ДУ).
В режиме автосопровождения на вход блока поступают:
· модулированные по амплитуде видеоимпульсы, глубина модуляции и фаза которых зависит от положения цели относительно равносигнальной зоны.
· опорные синусоидальные напряжения с ГОНа.
· синусоидальные напряжения с ВТ.
Управляющий сигнал с выхода блока управления антенной поступает на блок магнитных усилителей.
Блок магнитных усилителей предназначен для усиления мощности сигналов управления антенной. Усиленные сигналы с блока магнитных усилителей поступают на двигатель азимута и двигатель наклона антенны.
Автоселектор предназначен:
· для автоматического поиска цели по дальности с последующим автоматическим сопровождением одной захваченной автоселектором цели.
· для индикации момента захвата цели и перехода РЛС в режим автосопровождения.
· для отпирания приемника радиолокационное станции на время воздействия на него отражённого от сопровождаемой цели сигнала, т.е. для стробирования приемника.
Автоселектор состоит из:
· временного различителя,
· фантастрона,
· генератора медленной пилы,
· схемы сравнения,
· генератора строба
· схемы захвата.
Работа автоселектора ничем не отличается от работы типовых схем автоселектора.
Видеоимпульсы цели на автоселектор поступают с приемного блока.
Выходной импульс производит стробирование приемного блока.
Соединительная коробка служит для соединения всех блоков станции между собой и для осуществления многочисленных переключений, которые необходимы в процессе работы станции.
Блок питания является стабилизированным источником питания на борту самолета, работает от преобразователя ПО-1500/115В 400Гц /.
После краткого ознакомления с основными блоками станции, которые ничем не отличаются от таких же блоков в других РЛС, целесообразно ознакомиться с особенностями ЦД-30.
5. УСТРОЙСТВО ЗАЩИТЫ СТАНЦИИ ОТ ИМПУЛЬСНЫХ ПОМЕХ
Это устройство обеспечивает:
1. Синхронизацию работы всей станции.
2. Работоспособность станции в условиях наличия:
- несинхронных импульсных помех,
- синхронных импульсных помех, отраженных от дальних местных предметов и приходящих на второй и третий период работы станции.
В устройство защиты от помех станции входят следующие блоки:
· Блок защиты от несинхронных импульсных помех (блок 25)., обеспечивающий защиту от помех и синхронизацию работы станции.
· Синхронизатор (блок 36), выдающий импульсы запуска на передатчик и приемник.
· Приемник (блoк 38), подвергающийся защите от синхронных импульсных помех от дальних целей.
· Соединительная коробка (блок 42), обеспечивающий коммутацию цепей блока защиты.
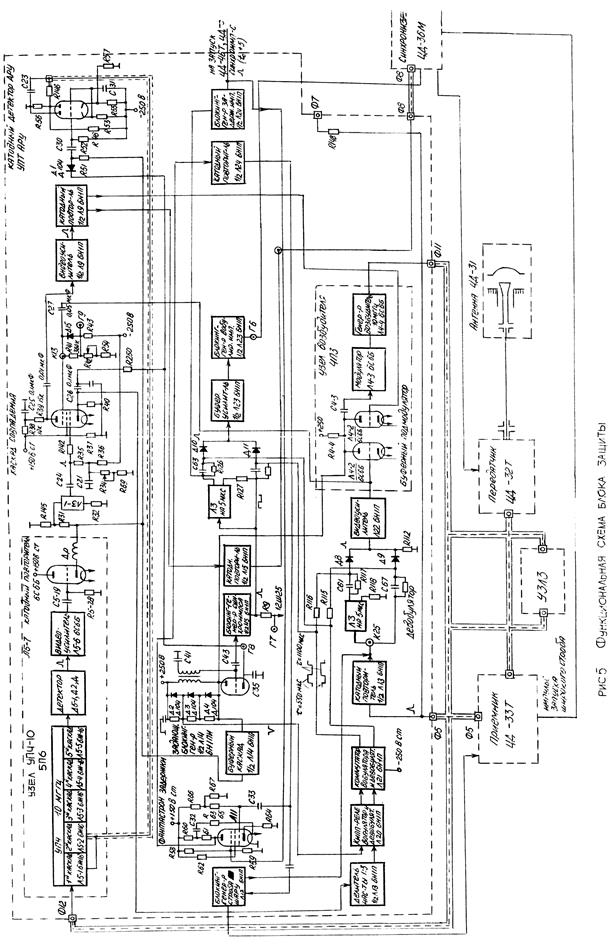
Функциональная схема устройства приведена на рис. 5 .
Синхронизация работы станции обеспечиваются строгой последовательностью запускающих импульсов, частота следования которых определяется ультразвуковой линией задержки (УЗЛЗ). Величина задержки УЗЛЗ равна Т мксек.
С самовозбуждающегося блокинг-генератора 25Л14, (имеющего собственную частоту повторения около 1500 Гц), отрицательный импульс длительностью 10-20 мксек поступает на сетку модулятора 25Л4-3, управляющего возбудителем 25Л4-4. Импульс возбудителя частотой 10 МГц возбуждает в УЗЛЗ кварц, построенный на 10 МГц. Кварц преобразует электрические колебания в механические, которые задерживаются в линии задержки.
На выходе УЗЛЗ имеется также настроенные на частоту 10 МГц второй кварц, преобразующим механические колебания в электрические. Слабые электрические колебания со второго кварца УЗЛЗ поступают в УПЧ-10, где усиливаются лампами 25Л5-1 - 25Л5-5 и детектируются Д5-1.
Продетектированный видеоимпульс усиливаются видеоусилителем 25 Л5-6 и через катодный повторитель 25л5-7 поступает на пускающую лампу самовозбуждающегося блокинг-генератора 25Л14, синхронизируя последний. Таким образом, задающий блокинг-генератор 25Л14 будет самосинхронизироваться с задержкой, определяемой УЗЛЗ.
Такой способ работы задающего блокинг-генератора приводит к высокой стабильности периода повторения (Т) синхроимпульсов.
Защита станции от несинхронных импульсных помех обеспечивается специальной схемой защиты, в состав которой входят:
· Схема совпадения 25Л8, обеспечивающая пропускание видеоимпульсов только в случае совпадения задержанного на период повторения и не задержанного видеоимпульсов цели.
· Схема задержки, обеспечивающая задержку видеоимпульса на период повторения импульсов.
· Схема интегрирования, обеспечивающая увеличение амплитуды видеосигнала.
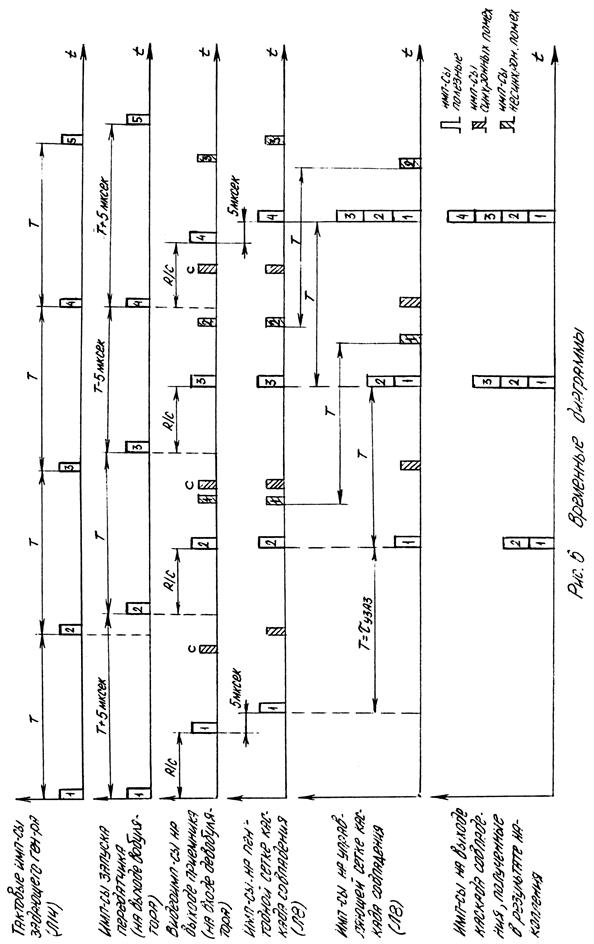
Принцип работы схемы защиты осуществляется за счет совпадения задержанного на период повторения и не задержанного импульсов цели и поясняется временной диаграммой приведенной на рис. 6 .
Видеоимпульс цели с выхода приемника через катодный повторитель 1/2 25Л13 поступает на вход девобулятора, с выхода которого поступает на сетку усилителя 25Л22. Усиленные видеоимпульсы поступают на пентодную сетку каскада совпадения 25Л8 и на усилитель узла 4ПЗ 25Л4-2.
Далее импульс цели, так же как и ранее описанный импульс синхронизации, проходит модулятор, возбудитель, УЗЛ и УПЧ-10.
Продетектированный и усиленный в видеоусилителе 25Л5-6 импульс цели через катодный повторитель 25 Л5-7 и корректирующую линию задержки на 0,1 мксек (25-ЛЗ-1) поступают на управляющую сетку каскада совпадения 25Л8. Одновременно с задержанным УЗЛ8 импульсом цели на каскад совпадения подается следующий видеоимпульс цели на пентодную сетку.
В результате совпадения во времени видеоимпульсов цели по двум сеткам на выходе схемы совпадения появляется импульс цели, который усиливается 1/2 25Л9 и через катодные повторители 1/2 25 Л9 и 1/2 25Л15 подается на вход блока защиты. Усиленный импульс совпадения с 25Л9 подается также на усилитель узла 4НЗ Л4-1, где складываясь с импульсом видео-усилителя Л4-2 не задержанного тракта, воздействуют на модулятор и возбудитель.
В результате такого сложения на выходе схемы совпадения имеет место возрастание амплитуды сигнала от импульса к импульсу - эффект интегрирования.
Несинхронные импульсы помехи, период повторения которых отличается от частоты повторения станции, но совпадают во времени на сетках каскада совпадения и не проходят через схему каскада совпадения.
Вероятность совпадения шумовых импульсов уменьшается за счет хаотичности следования их и наличия отсечки на управляющей сетке лампы каскада совпадения 25Л8.
За счет отсечки на управляющей сетке лампы совпадения, интегрирование сигнала начинается с некоторого порога, и на выходе схемы совпадения наблюдается значительном увеличение соотношения сигнал/шум.
Благодаря наличию обратной связи в схеме защиты/интегрирование/, осуществляется компенсация проигрыша в чувствительности на каскаде совпадения за счет отсечки.
Защита радиолокационного тракта от синхронных импульсных помех, приходящих от собственных зондирующих импульсов и попадающих на второй и третий период работы станции обеспечивается за счет вобуляции (модуляции во времени) посылок зондирующих импульсов.
Для обеспечения правильной работы блока защиты на первом периоде работы станции применена девобуляция отраженных вобулированных импульсов от цели.
Задним фронтом задающего блокинг- генератора 25Л14 запускается блокинг-генератор 1/2 25Л15, импульс с которого непосредственно, или задержанный на 5 мксек линией задержки вобулятора поступает на запуск следующего блокинг-генератора 25Л23. Импульс с катодной нагрузки блокинг-генератора 25Л23 выдается на запуск синхронизатора, с которого запускается передатчик.
Видеоимпульс цели, поступающей с выхода приемника ЦД-33 на блок защиты ЦД-25Т через катодный повторитель 1/2 П3 непосредственно, либо задержанный на 5 мксек линией задержки де-вобулятора, поступает на усилитель 25Л22, с которой подается на каскад совпадения и через усилитель 25Л4-2 узла 4П3 на модулятор.
Коммутация вобулятора и девобулятора осуществляется специальным коммутационным импульсом со схемы коммутатора. Причем вобуляция и девобуляция сфазированы таким образом, что когда импульс запуска передатчика на первом такте не задержвается, то импульс цели первого такта проходит на каскад совпадения с задержкой и наоборот, на 2-м и 3-м такте импульс запуска передатчика задерживается, а через девобулятор импульс цели проходит незадержанным.
Коммутацию задержки видеоимпульса цели и импульса запуска осуществляет триггерная схема 25Л20, запуск которой по одной сетке осуществляется с периодом Т импульсами задающего блокинг-генератора, а по другой сетке импульсами блокинг-генератора делится частоты 1:3 (I/2 25Л13) с периодом 3Т.
При такой коммутации запускающего импульса и видеоимпульсы цели получим одновременное поступление на каскад совпадения импульса цели с видеоусилителя 25П22 и импульса цели пришедшего через УЗЛЗ. Такое совпадений будет существовать при приходе отраженных импульсов цели на первом периоде работы станции. При приходе отраженных импульсов цели на второй и третий периоды работы станции от зондирующих импульсов первого периода одновременного поступления на каскад совпадения 25Л8 импульсов задержанных УЗПЗ и незадержанных существовать не будет. Такие отраженные импульсы через каскад совпадения не пройдут и, таким образом не попадут на индикаторное устройство.
Для исключения работы ШАРУ приемника ЦД-33 по собственным отраженным импульсам от дальних целей запуск его производится вобулированным импульсом, снимаемым с блокинг-генератора 25Л12. Блокинг-генератор запускается от фантастрона 25Л11. Длительность импульса фантастрона модулируются напряжением частоты 380-900 Гц.
6. УСТРОЙСТВО ФОРМИРОВАНИЯ И СТАБИЛИЗАЦИИ КОДОВЫХ СИГНАЛОВ ДЛЯ СНАРЯДА
Для обеспечения управления снарядом при автоматическом слежении за целью устройство формирования и стабилизации кодовых сигналов создает опорные сигналы в виде парных высокочастотных импульсов, генерируемых передатчиком в момент прохождения сканирующим лучом антенны положении верх-право-низ-лево относительно осей самолета.
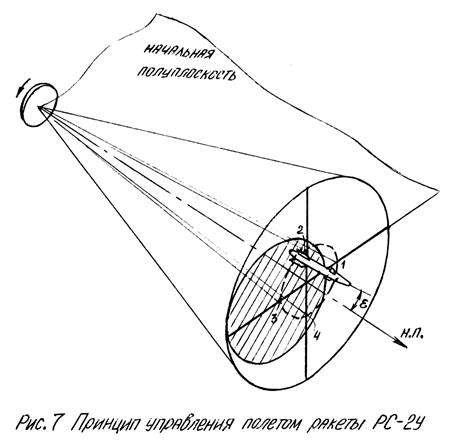
Прежде чем перейти к разбору функциональной схемы устройства формирования и стабилизации кодовых сигналов целесообразно разобраться в принципе управления полетом ракеты РC-2-У, которой вооружен истребитель-перехватчик. Принцип управления полетом ракеты РС-2-У иллюстрируется рис. 7 и состоит в следующем.
Станция ЦД-ЗОТ, находящаяся на борту самолёта, создает в пространстве равносигнальную линию, по которой ракета направляется к цели. При отклонении ракеты от равносигнальной линии бортовая радиоаппаратура управления ракетой РC-2-У вырабатывает управляющие токи. Величина управляющих токов пропорциональна глубине модуляции принятого радиосигнала и определяет величину отклонения рулей рулевыми машинами аппаратуры управления и стабилизации.
Распределение управляющих токов по каналам управления и полярность тока в каждом канале зависит от направления, в котором ракета отклонялась от равносигнальной линии. Данные позволяющие судить о направлении ухода ракеты от равносигнальной линии, содержатся в структуре самого радиосигнала и раскрываются бортовой радиоаппаратурой путем его расшифровки.
Радиосигнал станции ЦД-ЗОТ состоит из последовательности излучаемых радиоимпульсов. Среди основного ряда одиночных импульсов сканирующая система станции за один оборот излучают четыре парных импульса, так называемые кодовые пары - по одной через каждую четверть оборота антенны. На рис. 7 цифрами 1,2,3,4 отмечено положению луча в момент излучения соответственно 1-ой, 2-ой, 3-ей и 4-ой кодовых пар. Кодовые пары отличаются друг от друга интервалом времени между импульсами в паре. Моменты излучения кодовых пар соответствуют строго определённому положению в пространстве луча станции. На их базе бортовая радиоаппаратура формирует опорные напряжения, необходимые для выработки управляющих сигналов по азимуту и углу места.
Структура радиолуча станции ЦД-30Т изображена на рис. 8 .
Левая по полету полуплоскость, в которой лежит ось сканирующего луча в момент излучения 1-й кодовой пары принята за начальную. От нее отсчитывается фазовый угол огибающей модуляции радиосигнала, приходящего на антенну ракеты. Величина отсчитывается по часовой стрелке при виде по полету - в направлении вращения луча. На рис. 8 приведен график принимаемого ракетой радиосигнала. Как видно из графика, 1-я кодовая пара - в соответствии с изображённым на рисунке положением ракеты - сдвинута на угол от максимума огибающей модуляции принимаемого радиосигнала.
В устройство формирования и стабилизации кодовых сигналов входят следующие блоки участвующие в работе:
· блок защиты от импульсных помех, выдающий импульсы запуска;
· синхронизатор, выдающий кодированные импульсы синхронизации;
· передатчик, выдающий кодированные высокочастотные импульсы;
· система, излучающая высокочастотные импульсы передатчика и дающая опорные напряжения для формирования кодовых сигналов;
· блок стабилизации, обеспечивающий стабилизацию опорных напряжений антенны;
· соединительная коробка, обеспечивающая коммутацию при работе блоков.
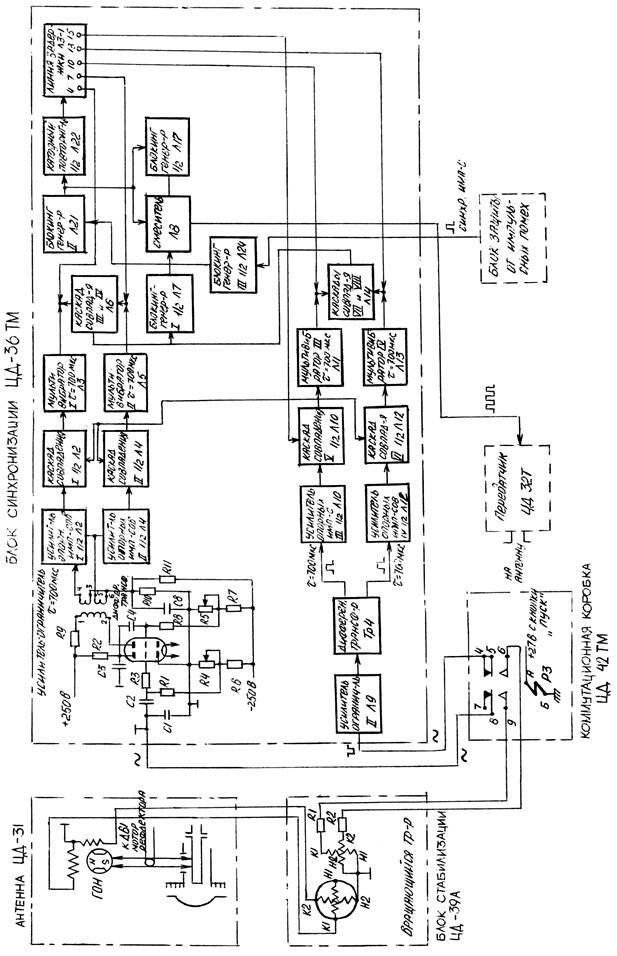
На рис. 9 представлена функциональная схема устройства формирования и стабилизация кодовых сигналов.
Привязка кодов сигналов к соответствующему пространственному положению сканирующего луча антенны обеспечивается с помощью опорных напряжений, выдаваемых генератором опорных напряжений. ГОН установлен на антенне и жестко связан через шестеренчатую передачу 1:1 с облучателем антенны. Генератор опорных напряжений выдает два синусоидальных напряжения, сдвинутых между собой на 90°. Эти напряжения поступают на ротор вращающегося трансформатора (ВТ) блока стабилизации опорных напряжений.
Ротop ВТ укреплен на оси наружной рамки гироскопа, статор в корпусе блока стабилизации, жестко связанном с осями самолета. На рис. 9 . изображена кинематическая схема стабилизации опорных напряжений, а эпюры напряжений канала формирования кодовых импульсов изображены на рис. 10 .
В момент пуска ракеты напряжение + 27в подается на электромагнит, который отводит рычаг, освобождая конус, толкатели и вызывая тем самым, разарретирование наружной и внутренней рамки гироскопа. Таким образом, жестко связанный с осями самолета статор ВТ будет вращаться относительно разарретированного ротора при кренах самолета, сохраняя в самолетных координатах относительно момента пуске фазу опорного синусоидального напряжения, поступающего с ГОНа антенны.
Со статора ВТ стабилизированные по фазе опорные синусоидальные напряжения поступают в блок синхронизации на электронную схему формирования кодовых импульсов для запуска передатчика.
В электронной схеме блока синхронизации синусоидальные напряжения поступают на управляющие сетки усилителей ограничителей 36Л1 и 36Л9. В аноде вторых каскадов усилителей включены дифференцирующие трансформаторы 36Тр2 и 36 Тр4.
С их вторичных обмоток снимаются опорные импульсы положительной полярности длительностью около 600 мксек, соответствующие фазам 0, 90, 180 и 270 градусов опорного напряжения ГОНа и поступают на управляющие сетки усилителей опорных напряжений 36Л2, 36Л4,36Л10, 36Л12 (левые половины).

Усиленные опорные напряжения отрицательной полярности подаются на катоды каскадов совпадения 36П2, 36П4, 36П10, 36Ш2 (правые половины), открывая их. На управляющие сетки ламп каскадов совпадения подаются импульсы частоты повторения. Первый из прошедших через каскады совпадения импульс производит запуск мультивибраторов 36ЛЗ, 36П5, 36Л11, 36Л13. Импульсы положительной, полярности и длительностью 700 мксек с анодов мультивибраторов подаются на управляющие сетки вторых каскадов совпадения 36Л6, 36Л14 (обе сетки), на эти же лампы с линии задержки 36ЛЗ-1 подаются импульсы, задержанные относительно импульсов частоты повторения на 2,3,4 и 5мксек. При совпадении импульсов, поступающих с линии задержки с импульсами мультивибраторов, происходит запуск блокинг-генератора 36Л7 (левая половина). С третьей обмотки импульсного Трансформатора импульсы положительной полярности поступают на управляющую сетку смесителя, на другую управляющую сетку поступают не задержанные импульсы частоты повторения.
С выхода смесителя импульсы поступают на запуск передатчика. Задержке импульсов соответствует следующим фазам сканирования облучателя:
· 2 мксек для фазы 0°
· 5 мксек для фазы 90°
· 3 мксек для фазы 180°
· 4 мксек для фазы 270°
Отчет угла ведется по часовой стрелке при наблюдении в направлении полета.