Синхронизация как механизм самоорганизации системы связанных осцил
СОДЕРЖАНИЕ: ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ КАФЕДРА ФИЗИКИ ПОЛУПРОВОДНИКОВ И МИКРОЭЛЕКТРОНИКИФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
ВОРОНЕЖСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
ФИЗИЧЕСКИЙ ФАКУЛЬТЕТ
КАФЕДРА ФИЗИКИ ПОЛУПРОВОДНИКОВ И МИКРОЭЛЕКТРОНИКИ
КУРСОВАЯ РАБОТА
Синхронизация как механизм самоорганизации в системе связанных осцилляторов
Руководитель: доцент
_____Хухрянский М.Ю.
Исполнитель: студентка
3 курса
Группы микроэлектроники
_____Машкова А. С.
Воронеж 2006
РЕФЕРАТ
Курсовая работа: 23 страницы, 6 иллюстраций, 17 формул, 7 источников.
Ключевые слова: синхронизация, самоорганизация, автоколебательная система, осциллятор.
В данной работе дается объяснение таких понятий, как синхронизация, самоорганизация, автоколебательная система. Приводится классификация явлений синхронизации, а также рассматривается синхронизация в цепочке N связанных осцилляторов и образование кластеров в дискретной цепочке осцилляторов и в непрерывной колебательной среде.
Оглавление
3. Синергетика, самоорганизация, синхронизация. 6
4. Автоколебательная система. 7
5. Характеристики ритма: период и частота. 8
6. Подстройка ритмов: захват фаз и частот. 9
7. Синхронизация: обзор различных случаев. 12
7. 1. Синхронизация внешней силой. 12
7. 2. Ансамбли осцилляторов и колебательные среды.. 12
7. 3. Фазовая и полная синхронизация хаотических осцилляторов. 13
8. 1. Синхронизация N связанных осцилляторов. 15
8. 2. Пример: цепочка лазеров. 17
9. 1. Кластеры в дискретной цепочке осцилляторов. 18
9. 1. Кластеры в непрерывной колебательной среде. 19
1. Введение
Синхронизация автоколебаний – одно из фундаментальных нелинейных явлений природы. Его можно рассматривать как метод самоорганизации взаимодействующих систем. Под синхронизацией обычно понимают установление некоторых соотношений между основными характеристиками колебаний систем в результате их взаимодействия. Эффект синхронизации, открытый Гюйгенсом еще в XVII веке, привлек к себе особый интерес ученых в связи с развитием науки и техники. Постепенно стало ясно, что различные явления, на первый взгляд не имеющие ничего общего, подчиняются неким универсальным законам. В настоящее время детально разработана теория синхронизации периодических автоколебаний, рассмотрены случаи синхронизации квазипериодических колебаний и колебаний в присутствии шумов. Также различают вынужденную синхронизацию, т. е. синхронизацию автоколебаний внешним сигналом, и взаимную синхронизацию, наблюдающуюся при взаимодействии двух и более автоколебательных систем. В обоих случаях проявляются одни и те же эффекты синхронизации, связанные с двумя механизмами: захватом собственных частот (и, соответственно, фаз) колебаний или же подавлением одной из собственных частот взаимодействующих систем.
2. Историческая справка
Голландский ученый Христиан Гюйгенс был, по всей видимости, первым исследователем, наблюдавшим и описавшим явление синхронизации еще в 17-том столетии. Он открыл, что двое маятниковых часов, висящих на общей опоре, синхронизируются, т. е. их колебания идеально совпадают, а маятники всегда движутся в противоположных направлениях. В своих дальнейших исследованиях Гюйгенс не только привел точное описание, но также дал качественное объяснение эффекта взаимной синхронизации. Он правильно понял, что согласованность ритмов двух часов была вызвана недоступными восприятию движениями опоры. В современной терминологии это означает, что часы синхронизовались в противофазе за счет связи через балку.
В середине девятнадцатого столетияДжон Вилльям Стретт, он же лорд Рэлей, не только наблюдал взаимную синхронизацию, когда различные, но схожие, органные трубы, начинают звучать в унисон, но также и эффект гашения (вымирания) колебаний, когда связь приводит к подавлению колебаний во взаимодействующих системах.
Новый этап в исследовании синхронизации был связан с развитием электро- и радиотехники. 17 февраля 1920 года В. Экклес и Дж. Винсент подали заявку на британский патент, подтверждающий открытие ими свойства синхронизации триодного генератора. В своих экспериментах, Экклес и Винсент связали два генератора со слегка различными частотами и продемонстрировали, что связь вынуждает системы осциллировать на общей частоте.
Синхронизация в живых системах также известна уже несколько столетий. Например, большая популяция светлячков может излучать вспышки света синхронно. Множество исследований, выполненных математиками, инженерами, физиками и специалистами из других областей, привели к пониманию того, что, скажем, согласованность звучания органных труб или же стрекотания сверчков не случайна, а может быть описана единой теорией [1].
3. Синергетика, самоорганизация, синхронизация
В последние десятилетия развитию науки свойственны не только глубокая специализация в отдельных ее отраслях, но и мощная тенденция проникновения идей и методов из одной области в другие. И как следствие – появление новых наук, например таких, как биологическая физика, биохимия, астрофизика и т. п. В этом смысле молодая теория самоорганизации, которая охватывает многие отрасли знаний, также является синтетической теорией, позволяющей осмыслить многие явления в живой и неживой природе с единой точки зрения.
В научной литературе теория самоорганизации носит название «синергетика». Этот термин ввел Х. Хакен [4]. По Хакену, синергетика занимается изучением систем, состоящих из большого числа частей, компонент или подсистем, сложным образом взаимодействующих между собой. Слово синергетика и означает совместное действие, подчеркивая согласованность функционирования частей, отражающуюся в поведении системы как целого[5].
Толкование термина синхронизация различается в зависимости от специализации и индивидуальных точек зрения. В данной работе авторами не предлагается какого-либо общего определения синхронизации , которое включало бы все эффекты во взаимодействующих колебательных системах. Мы понимаем синхронизацию как подстройку ритмов осциллирующих объектов за счет слабого взаимодействия между ними [1].
Синхронизация может возникнуть в силу естественных свойств самой системы взаимодействующих объектов. В этом случае говорят о взаимной синхронизации . В других случаях для согласования поведения объектов необходимо привнесение в систему дополнительных связей или воздействий, что указывает на синхронизацию внешней силой [6].
4. Автоколебательная система
Введем понятие динамической системы. Под динамической системой понимают любой объект или процесс, для которого однозначно определено понятие состояния как совокупности некоторых величин в данный момент времени, и задан закон, который описывает изменение начального состояния с течением времени. Этот закон позволяет по начальному состоянию прогнозировать будущее состояние динамической системы, и его называют законом эволюции. Описание динамических систем может осуществляться с помощью дифференциальных уравнений [2].
Синхронизация может возникнуть лишь в автоколебательных системах. Автоколебательной системой называют систему, преобразующую энергию постоянного источника в энергию колебаний.
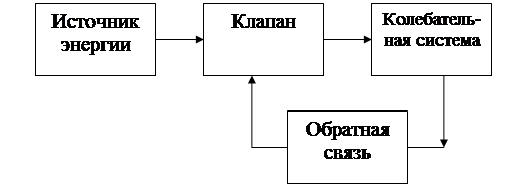
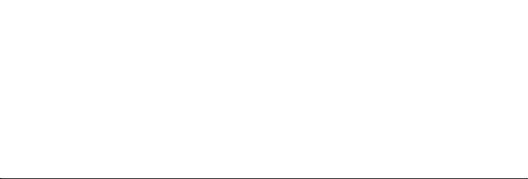
Рис. 1. Общая схема автоколебательной системы.
Необходимыми элементами всякой автоколебательной системы являются:
· собственно колебательная система;
· источник постоянной энергии;
· элемент, управляющий поступлением энергии в колебательную систему, который мы условно назовем клапаном;
· цепь обратной связи между колебательной системой и клапаном. В некоторых системах указанные элементы можно явно выделить, в других они бывают совмещены, так что их функции не сразу очевидны. Но в той или иной форме эти элементы присущи всякой автоколебательной системе [3].
Выделим общие свойства автоколебательных систем:
· будучи изолированным, осциллятор продолжает генерировать один и тот же ритм, пока не иссякнет источник энергии [1];
· форма автоколебаний определяется параметрами системы и не
зависит от того, как система была «включена», т.е. от перехода
к стационарным колебаниям [1];
· автоколебания устойчивы по отношению к возмущениям (по крайней мере малым): будучи возмущенными, колебания вскоре восстанавливают свою исходную форму [1];
· являются нелинейными (т. е. описываются нелинейными дифференциальными уравнениями) и неконсервативными [2].
Автоколебательные системы самой различной природы чрезвычайно распространены. Они играют очень большую и важную роль в различных областях науки и техники: механике, автоматике, физики, химии, биологии, радиотехнике, электроники и др. Наиболее известными примерами механических автоколебательных систем являются часы и паровая машина, а также ламповые генераторы или генераторы на полупроводниковых приборах, лазеры, различного рода генераторы звука и т. д. Автоколебательными системами является сердце человека и животных [3], а также биоритмы живых организмов [7].
5. Характеристики ритма: период и частота
Автоколебательные системы могут демонстрировать ритмы самой разной формы, от простых, близких ксинусоиде, сигналов до последовательности коротких импульсов. Главной характеристикой таких систем является период Т , т. е. время одного колебания.
Часто бывает удобно характеризовать ритм числом колебаний в единицу времени или же частотой колебаний
f
=
![]() .
(1)
.
(1)
При теоретическом анализе колебаний более удобной часто бывает угловая частота =2 f =2/Т.
6. Подстройка ритмов: захват фаз и частот
Два неидентичных осцилляторов, которые, взятые по отдельности, имеют различные периоды, при наличии связи подстраивают свои ритмы и начинают демонстрировать колебания с общим периодом. Это явление часто и называют в терминах совпадения частот их захватом. Произойдет это или нет, т. е. синхронизуются ли они, зависит от двух факторов:
1. Сила связи. Этот параметр характеризует, насколько слабо или сильно взаимодействие;
2. Расстройка по частоте. Расстройка частот f =f 1 – f 2 характеризует, насколько различны осцилляторы. Представим себе следующий эксперимент. Пусть собственные частоты двух невзаимодействующих осцилляторов f 1 и f 2 . Свяжем осцилляторы и измерим частоты F 1 и F 2 связанных систем. Мы можем выполнить такие измерения для различных параметров расстройки и получить зависимость F =F 1 –F 2 от f [1] (pис. 2).
Эта зависимость типична для взаимодействующих автоколебательных систем, независимо от их природы (механической, химической, электронной, и т. д.). Анализ показывает, что, если рассогласованность автономных систем не слишком велика, то частоты двух систем становятся равными, или захваченными , т. е. наступает синхронизация. В общем случае ширина области синхронизации возрастает с увеличением силы связи [3].
Рис. 2. График «разность наблюдаемых частот - расстройка» для некоторой фиксированной силы связи. Разность частот F двух связанных осцилляторов изображена как функция расстройки f несвязанных систем. В определенном диапазоне расстроек частоты связанных осцилляторов идентичны (F=0), что указывает на синхронизацию.
Более детальное рассмотрение синхронных состояний показывает, что синхронизация двух автоколебательных систем может возникнуть в двух формах. Чтобы описать эти режимы, введем ключевое понятие теории синхронизации, а именно понятие фазы осциллятора [1]. Фаза понимается как величина, пропорциональная доле периода и возрастающая на 2 в течение одного цикла колебаний. Фаза однозначно определяет положение периодического осциллятора. Как и время, она параметризует сигнал внутри одного цикла.
(t)=o
+2![]() (2)
(2)
Рассмотрим разность фаз двух автоколебательных систем. Если в результате синхронизации разность фаз 1 –2 близка к нулю, то такой режим называется синфазной синхронизацией . Если взглянуть на колебания осцилляторов с большой точностью, то можно выявить, что эти колебания не в точности совпадают, так что обычно говорят о фазовом сдвиге между двумя колебаниями. Этот фазовый сдвиг может быть очень мал, но он всегда присутствует, если две системы изначально имели разные периоды, или же разные частоты.
Если разность фаз синхронизованных осцилляторов близка к , то говорят о синхронизации в противофазе .
Возникновение определенного соотношения между фазами двух синхронизованных автоколебательных систем часто называют захват фаз . Т. о. можно сформулировать основной признак синхронизации: будучи связанными, два осциллятора с изначально различными частотами и независимыми фазами подстраивают свои ритмы и начинают осциллировать на общей частоте [3]. Это также предполагает наличие определенного соотношения между фазами двух систем. Так, говорят, что фазы 1 и 2 захвачены в отношении n : m, если выполняется неравенство:
|n 1 – m 2 | constant (3)
Подводя итоги, можно сказать, что если в каком-либо эксперименте мы наблюдаем две переменные, которые кажутся изменяющимися синхронно, то это не обязательно означает, что мы наблюдаем синхронизацию. Чтобы назвать явление синхронизацией, мы должны быть уверены в том, что:
·мы анализируем поведение автоколебательных систем,
т.е. систем, способных генерировать собственные ритмы;
·системы подстраивают свои ритмы за счет слабого взаимодействия;
·подстройка ритмов происходит в некотором диапазоне расстроек между системами; в частности, если частота одного из
осцилляторов медленно изменяется, то вторая система следует
за этим изменением.
Соответственно, одного наблюдения недостаточно, чтобы сделать вывод о наличии синхронизации. Синхронизация — это слож ный динамический процесс, а не состояние [1].
7. Синхронизация: обзор различных случаев
Перечислим различные формы синхронизации без учета природы колебаний (т.е. генерируются ли они электронным устройством или живой клеткой) и природы связи (т.е. осуществляется ли она за счет механического соединения или диффузии реагентов химической реакции), т.е. остановимся на общих свойствах: являются ли колебания периодическими или нерегулярными; является ли связь взаимной или однонаправленной и т.д.Это не будет полной и строгой классификацией, а просто кратким обсуждением основных проблем теории синхронизации.
7. 1. Синхронизация внешней силой
Синхронизация была открыта Гюйгенсом как побочный результат его усилий по созданию высокоточных часов. В наши дни этот эффект используется для точного и недорогого измерения времени с помощью радиоуправляемых часов. В этом случае передаваемый порадио слабый сигнал от центральных высокоточных часов ежеминутно подстраивает ритм других часов, темсамым захватывая.
Похожая схема синхронизации была «реализована» природой для подстройки биологических часов, которые регулируют суточные (циркадные) и сезонные ритмы живых систем, от бактерии до человека.
7. 2. Ансамбли осцилляторов и колебательные среды
Во многих естественных ситуациях взаимодействуют более двух объектов. Если два осциллятора способны к подстройке ритмов, то можно ожидать такой способности и от большого числа осцилляторов. Такая система называется ансамблем взаимно связанных осцилляторов . При этом можно говорить о глобальной (каждый с каждым) связи. Бывают и другие ситуации, когда осцилляторы упорядочены в цепочки или решетки, где каждый элемент взаимодействует с несколькими соседями. Такие структуры типичны для созданных человеком систем, например, для решеток лазеров, но могут также встречаться и в природе. Эксперименты показывают, что соседние осцилляторы в цепочке часто подстраивают своичастоты и формируют синхронные кластеры.
Достаточно часто мы не можем выделить отдельный колебательный элемент внутри естественного объекта. Вместо этого мы должны рассматривать систему как непрерывную колебательную среду, где также возможна синхронизация.
7. 3. Фазовая и полная синхронизация хаотических осцилляторов
В наши дни широко известно, что автоколебательные системы, например нелинейные электронные цепи, могут генерировать довольно сложные, хаотические сигналы. Многие естественные системы также демонстрируют сложное поведение. Недавние исследования показывают, что при наличии связи такие системы также могут синхронизоваться. Конечно же, в этом случае нам необходимо уточнить понятие синхронизации, потому что совершенно не очевидно, как характеризовать ритм хаотического осциллятора. Иногда хаотические сигналы относительно просты, как, например, показанный на рисунке 3. Такой сигнал — «почти периодический». Можно считать, что он состоит из похожих циклов с изменяющейся амплитудой и периодом (который может быть грубо определен как интервал между соседними максимумами). Выбрав большой интервал времени , мы можем сосчитать число циклов в этом интервале N ,вычислить среднюю частоту
 (4)
(4)
и взять ее в качестве характеристики хаотического колебательного процесса [4].
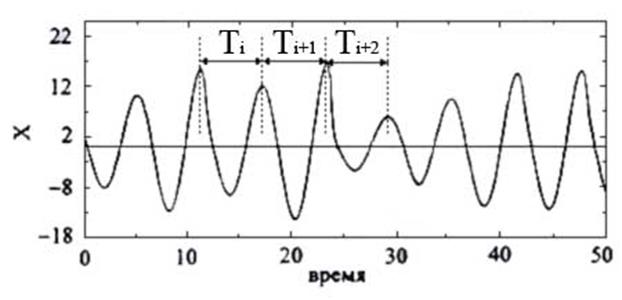
Рис.3. Пример хаотических колебаний.
С помощью средних частот мы можем описать коллективное поведение взаимодействующих хаотических систем точно так же, как и периодических. Если связь достаточно велика (например, для резистивно связанных электрических цепей это означает, что сопротивление должно быть достаточно мало), средние частоты двух осцилляторов становятся равными. Важно отметить, что совпадение средних частот не означает, что сигналы также совпадают. Оказывается, что слабая связь не оказывает влияния на хаотическую природу обоих осцилляторов, их амплитуды остаются нерегулярными и некоррелированными, в то время как частоты подстраиваютсятаким образом, что мы можем говорить о фазовом сдвиге между сигналами. Такой режим называется фазовой синхронизацией хаотических систем .
Очень сильная связь стремится сделать состояния обоих осцилляторов идентичными. Она влияет не только на средние частоты, но также и на хаотические амплитуды. В результате, сигналы совпадают (или почти совпадают) и наступает режим полной син хронизации .
Явление синхронизации может также наблюдаться в больших ансамблях взаимно связанных хаотических систем и в сформированных имипространственных структурах [1].
8. Цепочки осцилляторов
8. 1. Синхронизация N связанных осцилляторов
Рассмотрим синхронизацию N связанных осцилляторов на примере электронных генераторов, связанных через емкость, индуктивность и сопротивление. Уравнения колебаний в такой системе имеют вид:
 (i=1,2,...,N). (5)
(i=1,2,...,N). (5)
Здесь xi – напряжения на входах усилителей, i – собственные частоты колебательных контуров, i – превышения над порогом генерации, ij (1) – коэффициенты индуктивной связи, i j (2) – коэффициенты емкостной связи, ij (3) – коэффициенты связи через сопротивление, (1 – i xi 2 ) – функции, характеризующие нелинейные свойства усилителей.
Будем считать, что частоты автономных генераторов близки друг к другу, тогда решение уравнения (5) можно искать в виде:
xi
=Аi
cos(t+i
), ![]() = – Аi
sin(t+i
), (6)
= – Аi
sin(t+i
), (6)
где =(1/N) .
.
Для амплитуд и фаз получаем следующие уравнения:
 (7)
(7)
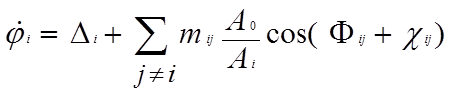 (8)
(8)
где Ai 0 – амплитуда колебаний i-го генератора в отсутствии связи, ij =i – j , (9)
i =i – , (10)
mij
=![]() [(ij
(1)
2
– ij
(3)
)2
+ ij
(2)2
]1/2
, (11)
[(ij
(1)
2
– ij
(3)
)2
+ ij
(2)2
]1/2
, (11)
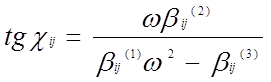 (12)
(12)
Рассмотрим случай слабой связи между генераторами, когда в уравнениях для фаз (8) можно положить Ai
=Ai
0
. В синхронном режиме, когда ![]() , получим следующую систему уравнений для определения стационарных разностей фаз:
, получим следующую систему уравнений для определения стационарных разностей фаз:
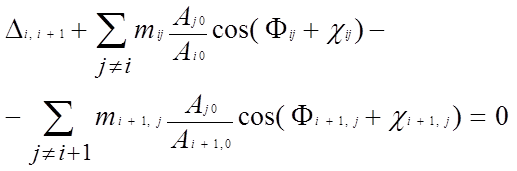 (13)
(13)
где i=1,2,...,N – 1, i,i+1 =i – i+1 =i – i+1.
Система уравнений (13) аналитически может быть решена лишь для частного случая полностью идентичных генераторов, когда Ai 0 =A0 , mij =m, ij =, i = для всех i и j. В этом случае уравнения (13) примут вид:
 (i=1,...,N – 1).(15)
(i=1,...,N – 1).(15)
Уравнение (15) имеет два частных решения:
ij = 0, (16)
i
j
= ± (j – i)![]() (17)
(17)
Частота синхронных колебаний в случае синфазного режима работы генераторов равна с = + (N – 1)mcos, а во втором случае с = – mcos [3].
8. 2. Пример: цепочка лазеров
Синхронизация в цепочке лазеров часто используется для получения излучения большой интенсивности. Этого можно достигнуть, расположив лазеры в линию, так, что каждый взаимодействует с ближайшими соседями или со всеми другими лазерами. Добиться взаимодействия каждого лазера с остальными можно с помощью специального пространственного фильтра. При такой конфигурации каждый лазер взаимодействует с остальными, но сила связи зависит от расстояния между лазерами. Результаты, представленные на рисунке 4, четко указывают на синхронизацию. Действительно, если бы лазеры были не синхронизованы, то излучение в дальней зоне представляло бы собой сумму некогерентных колебаний, и потому было бы пространственно однородным. Неоднородность распределения на рисунке 4 появляется из-за захвата фаз, это типичная интерференционная картина.
 Рис. 4. Интенсивность излучения в дальней зоне при слабой связи лазеров.
Рис. 4. Интенсивность излучения в дальней зоне при слабой связи лазеров.
9. Образование кластеров
9. 1. Кластеры в дискретной цепочке осцилляторов
Если в дискретной цепочке осцилляторы взаимодействуют очень слабо, то синхронизации не будет, и каждая система будет колебаться со своей частотой. При достаточно сильной связи будет наблюдаться синхронизация всей цепочки. В промежуточном случае можно ожидать появление частично синхронизированных режимов, с несколькими различными частотами. Поскольку связь стремится синхронизировать ближайших соседей, образуются кластеры синхронизированных осцилляторов [1].
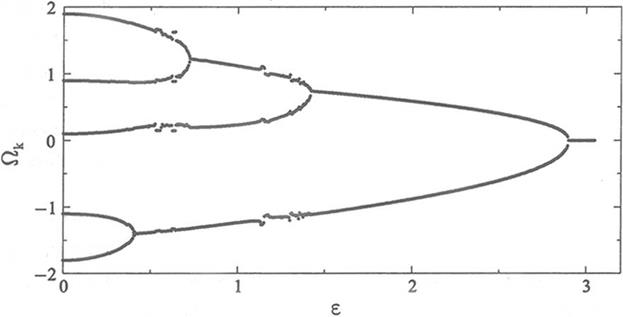 Рис. 5. Зависимость наблюдаемых частот k
от параметра связи
в цепочке из пяти осцилляторов. Собственные частоты равны -1.8, -1.1, 0.1, 0.9, 1.9, функция связи выбрана в виде q(x)=sinx. С увеличением связи сначала осцилляторы 1 и 2 образуют кластер при
0.4. Затем при
0.6 появляется кластер из осцилляторов 4 и 5. При
1.4 к нему присоединяется осциллятор 3. Наконец, при
3 все осцилляторы синхронизируются.
Рис. 5. Зависимость наблюдаемых частот k
от параметра связи
в цепочке из пяти осцилляторов. Собственные частоты равны -1.8, -1.1, 0.1, 0.9, 1.9, функция связи выбрана в виде q(x)=sinx. С увеличением связи сначала осцилляторы 1 и 2 образуют кластер при
0.4. Затем при
0.6 появляется кластер из осцилляторов 4 и 5. При
1.4 к нему присоединяется осциллятор 3. Наконец, при
3 все осцилляторы синхронизируются.
9. 1. Кластеры в непрерывной колебательной среде
Образование кластеров в непрерывной колебательной среде является результатом двух противоположных факторов: неоднородности распределения собственных частот и связи, которая старается уравнять состояния систем. Такая связь часто возникает вследствие диффузии, и поэтому называется диффузионной. Рассмотрим, что происходит на границе двух кластеров, имеющих разные частоты. Здесь важно различать случал дискретной цепочки и непрерывной среды.
В дискретной цепочке граница между двумя кластерами есть граница между двумя осцилляторами, имеющими разные частоты. Это просто означает, что они не захвачены: каждый колеблется со своей частотой. В отличие от этого, если в сплошной среде два осциллятора в двух пространственных точках имеют разные частоты, то между ними должен быть непрерывный переход. На первый взгляд, можно просто провести непрерывный профиль частот, соединяющий эти точки. Более детальное рассмотрение показывает, что это невозможно. Действительно, разные частоты отвечают разным скоростям вращения фазы. Поэтому разность фаз между точками, принадлежащими к двум кластерам, растет во времени со скоростью, пропорциональной разности частот. Следовательно, профиль фазы становится все более наклонным. С другой стороны, непрерывный крутой профиль фазы означает, что в среде образуются волновые структуры с все меньшей и меньшей длиной волны. Рост разности фаз между кластерами приводит к укорочению длины волны со временем. Ясно, что этот процесс долго продолжаться не может — и действительно, среда находит выход из этой ситуации. Увеличивающийся градиент фазы уменьшается за счет пространственно-временного дефекта . Дефект образуется, когда амплитуда колебаний обращается в ноль, он позволяет сохранить градиент фазы конечным.
Чтобы продемонстрировать, как возникает пространственно-временной дефект, предположим, что разность фаз между точками 1 и 2, принадлежащими разным кластерам, достигла значения 2. Если бы между 1 и 2 не было среды, то мы бы просто считали состояния в этих точках почти идентичными. В среде, однако, существует непрерывный профиль фазы между этими точками. Представляя как амплитуду, так и фазу в полярных координатах, мы можем изобразить поле окружностью. (рис. 6).
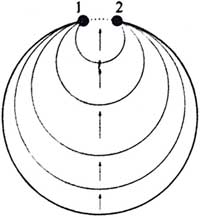
Рис. 6. Иллюстрация пространственно-временного дефекта. Начальный профиль фазы и амплитуды между точками 1 и 2 показан жирной сплошной линией. С течением времени амплитуда уменьшается и профиль меняется, как показано стрелками. В конечном состоянии (пунктирная линия) разность фаз между точками 1 и 2 близка к нулю.
Рассмотрим теперь влияние связи в среде на профиль амплитуды и фазы. Типичная связь — диффузионная, или, по крайней мере, имеет диффузионную компоненту; она стремится уменьшить разность между состояниями ближайших соседей, т.е. уменьшить разность между состояниями в точках 1 и 2. Единственная возможность добиться этого — это уменьшить амплитуду колебаний. Из рисунка 6 видно, что такое уменьшение амплитуды действительно превращает профиль фазы между 1 и 2 из окружности в почти точку. В конечном состоянии фазы в точках 1 и 2 почти равны, хотя изначально они различались на 2 [1]. После амплитуда снова нарастает, и процесс повторяется, т. е. наблюдаются биения .
10. Заключение
Анализ научной литературы показал, что явление синхронизации широко распространено в обществе, природе и технике. Мы понимаем синхронизацию как подстройку ритмов осциллирующих объектов за счет слабого взаимодействия между ними. Синхронизация зависит от двух факторов: сила связи и расстройка по частоте. Существует два режима взаимной синхронизации двух автоколебательных систем: синфазная синхронизация и в противофазе. В обоих случаях разность фаз не в точности ноль (не в точности 2), так что говорят о фазовом сдвиге между двумя колебаниями. Взаимная синхронизация может возникнуть как в системе нескольких взаимодействующих автоколебательных систем, так и в ансамбле глобально связанных осцилляторов, дискретных цепочках или решетках, а также в непрерывных колебательных средах. При определенной силе связи возможно образование кластеров синхронизированных осцилляторов. Достаточно распространены автоколебательные системы, генерирующие хаотические сигналы, где также возможна синхронизация.
Литература
1. Пиковский А. А. Синхронизация. Фундаментальное нелинейное явление. М.:2003, 496 с.
2. Анищенко В. С. Знакомство с нелинейной динамикой: Лекции соросовского профессора: Учеб. пособие. М.:2002, 144с.
3. Ланда П. С. Автоколебания в системах с конечным числом степеней свободы. М.:1980, 356 с.
4. Романовский Ю. М. Процессы самоорганизации в физике, химии и биологии. М.:1981, 48с.
5. Данилов Ю. А. Роль и место синергетики в современной науке. www.synergetic.ru/science/index.php?article=dan2#up
6. Фрадков А. Л. Кибернетическая физика: принципы и примеры. www.ipme.ru/ipme/labs/ccs/alf/f03.pdf
7. Львова Л. В. Ритмы жизни. www.provisor.com.ua/archive/2003/N1/art_34.htm