Синтез и построение системы управления динамическими объектами
СОДЕРЖАНИЕ: Синтез системы управления квазистационарным объектом. Математическая модель нестационарного динамического объекта. Передаточные функции звеньев системы управления. Построение желаемых логарифмических амплитудно-частотных и фазочастотных характеристик.КУРСОВАЯ РАБОТА
с дисциплины: “Элементы и системы автоматического контроля и управления
на тему: “Синтез и построение системы управления нестационарными динамическими объектами
Содержание
Введение
1.Синтез системы управления квазистационарным объектом
1.1 Математическая модель нестационарного динамического объекта
1.2 Представление схемы переменных состояний в форме Коши
1.3 Нахождение передаточных функций звеньев системы управления
1.4 Построение логарифмических амплитудно-частотных и фазочастотных характеристик
2.Синтез скорректированной квазистационарной системы
2.1 Построение желаемых логарифмических амплитудно-частотных и фазочастотных характеристик
2.2 Построение логарифмической амплитудно-частотной характеристики корректирующего звена системы
3.Разработка структурной и принципиальной схем управления нестационарным динамическим объектом
3.1 Разработка структурной схемы устройства
3.2 Разработка и расчет принципиальной схемы
Заключение
Список литературы
Введение
Информация об объекте управления может быть получена путем измерения соответствующих параметров. Однако не все параметры могут быть непосредственно измерены из-за отсутствия необходимых средств измерения или недопустимости этих параметров для контроля.
Это приводит к снижению качества управления, и особенно проявляется при управлении объектами, параметры которых являются функциями времени. Такие объекты принято называть нестационарными динамическими объектами.
Однако проблема построения информационно-управляющих систем нестационарных динамических объектов (НДО), а также проблема комплексной оценки анализа параметрического и фазового состояния объектов с неизвестными и переменными во времени динамическими характеристиками, и неполным вектором измерения фазовых координат, не нашли должного освещения в современной литературе. В тоже время целесообразность решения этих задач становиться очевидной.
Особое внимание в данной работе отводится анализу обоснования выбранных методов и критериев, принципа функционирования, оценки результатов и рекомендаций о возможных путях повышения систем автоматического управления.
По заданному нестационарному дифференциальному уравнению, которым описывается поведение объекта управления, находится параметрическая функция. Выбирается метод решения синтеза системы с учетом ограничений.
Методом квазистационарности находим передаточную функцию объекта и по заданным показателям качества переходного процесса строим желаемую ЛАЧХ скорректированной системы, а затем находим передаточную функцию, схему и параметры корректирующего устройства.
1 .Синтез системы управления квазистационарным объектом
1.1 Математическая модель нестационарного динамического объекта
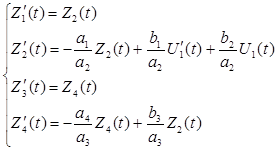
Для представления динамического процесса заданного системой дифференциальных уравнений в переменных состояния решим её относительно старшей производной:
 , (1.1)
, (1.1)
 . (1.2)
. (1.2)
Полученная система дифференциальных уравнений (1.2) представляет собой структуру динамического процесса в переменных состояния
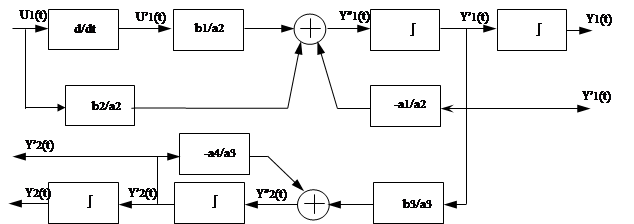
Анализ системы (1.2) показывает, что объект управления содержит: два сумматора складывающих все компоненты входящие в динамический процесс. На вход сумматоров подаётся составляющая входного возмущения, реакция объекта и составляющая производная от реакции объекта.
Схема динамического процесса в переменных состояния будет иметь вид.
Рисунок 1 - Схема динамического процесса в переменных состояния
1.2 Представление схемы переменных состояний в форме Коши
Представим систему дифференциальных уравнений в векторно-матричной форме.
Z (t) = A*Z (t) +B*U (t), (1.3)
где матрица А - динамическая матрица объекта управления, которая характеризует динамику объекта;
Z (t) - вектор фазового состояния;
В - матрица управляющих (возмущающих) объекта, которая характеризует степень возмущения (управления);
U (t) - вектор возмущения.
Для нахождения динамической матрицы, вектора состояния, матрицы управляющих объекта, вектора возмущений введем некоторую переменную Z (t), и воспользуемся преобразованием Коши для системы дифференциальных уравнений (1.1):
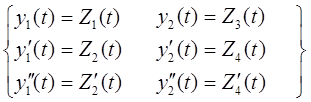 , (1.4)
, (1.4)
тогда система (1.2) примет вид:
 . (1.5)
. (1.5)
Перейдем от системы уравнений (1.5) к векторно-матричной форме:
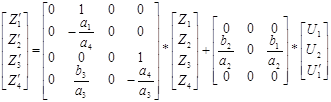 . (1.6)
. (1.6)
Таким образом, выражение (1.3) описывает поведение объекта управления в переменных в параметрическом и фазовом пространствах.
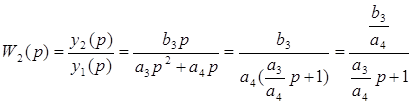
1.3 Нахождение передаточных функций звеньев системы управления
Для того чтобы найти передаточные функции системы запишем исходную систему в операторной форме
 (1.7)
(1.7)
и разрешим её относительно реакций динамического процесса у1 и у2
 , (1.8)
, (1.8)
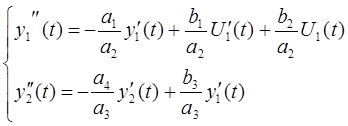
откуда находим для первого уравнения
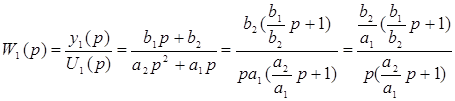 , (1.9)
, (1.9)
или 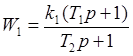 ,
,
где  ;
;  ;
;  ;
;
для второго уравнения
 (1.20)
(1.20)
или 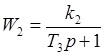 ,
,
где  ;
;  .
.
Подставляя значения коэффициентов находим параметры звеньев системы
k1 = 0,5; k2 = 0,42;
T1 = 44 с; Т2 = 0,1 с;
Т3 = 0,025 с.
Полученная система описывает структуру исходного динамического процесса в передаточных функциях. Структура процесса имеет следующий вид
 |
Рисунок 2 - Структура исходного динамического процесса
Исходя из того, что показатель астатизма pn выбираем пропорциональный регулятор.
Коэффициент передачи всей системы равен
kv = 1/c = 1/0,008 = 125;
kv = k1 k2 kp ; (1.21)
kp = kv / (k1 k2 ) = 595,28.
Находим частоты сопряжения исходной разомкнутой системы
i = 1/Тi , где i = 1, 2, …,
тогда 1 = 0,0227 с-1 ;
2 = 10 с-1 ;
3 = 40 с-1 .
Передаточная функция всей системы будет иметь вид
Wпс (p) = W1 (p) W2 (p) Wр (p) (1.22)
1.4 Построение логарифмических амплитудно-частотных и фазочастотных характеристик
Построение ЛAЧХ и ЛФЧХ данной системы (см. приложение 1):
на оси ординат откладываем коэффициент передачи в децибелах
K (дб) = 20 lgkv = 20 lg 125 = 41,93 дб;
по оси абсцисс откладываем частоты;
поскольку знаменатель передаточной функции состоит из двух множителей с коэффициентом астатизма 1, то прямая проходящая через точку 41,93 на оси ординат, будет иметь наклон - 20 дб/дек до первой частоты сопряжения 1 . Следующая прямая имеет наклон +20 дб/дек по отношению к предыдущей (форсирующее звено). Третья прямая будет иметь наклон -20 дб/дек по отношению к предыдущей (апериодическое звено). Четвертая прямая будет иметь наклон -20 дб/дек по отношению к предыдущей (апериодическое звено) с продлением в область высоких частот.
ЛАЧХ и ЛФЧХ данной системы будут иметь следующий вид
L () = 20 lgkv + 20 lg2 - 20 lg1 - 20 lg3;
(1 ) = - +arctg 1 - arctg 2 -arctg 3.
В результате построения частотных характеристик и сложения фазочастотных характеристик видим, что данная разомкнутая нескорректированая система не имеет запаса ни по амплитуде, ни по фазе, следовательно, необходимо строить корректирующее звено.
2 .Синтез скорректированной квазистационарной системы
2.1 Построение желаемых логарифмических амплитудно-частотных и фазочастотных характеристик
При построении желаемой ЛАЧХ целесообразно выделить три области частот: область низких, область средних и область высоких частот.
В интервале низких частот вид ЛАЧХ указывает на порядок астатизма и статическую точность системы. При частотах, меньших первой сопрягающей частоты ЛАЧХ имеет наклон 20 дб/дек, где - порядок астатизма системы.
Интервал средних частот лежит между первой и второй сопрягающими частотами, т.е.
1к ср 2к ,
2к = (3 - 4) ср ,
 , (1.23)
, (1.23)
 ,
,
где tр - время регулирования квазистационарной системы;
- коэффициент, зависящий от величины перерегулирования %, определяемый по графику зависимости (рис.3).
Рисунок 3 - График зависимости коэффициента ( %)
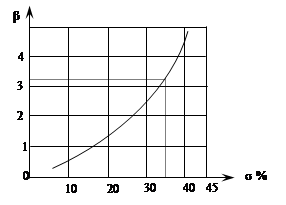 |
Выбираем коэффициент = 3.2, тогда
![]() с-1
;
с-1
;
2к = 3,5 ср = 3,5 13,39 = 46,89 47 с-1 ;
1к = 4,17 4 с-1 .
Таким образом, определив все частоты, строим желаемую ЛАЧХ из таких соображений:
В области низких частот наклон ЛАЧХ -40дб/дек, в области средних частот наклон ЛАЧХ имеет -20 дб/дек, в области высоких частот наклон ЛАЧХ совпадает с наклоном ЛАЧХ нескрорректированной системы, поскольку на переходной процесс она большого влияния не оказывает.
По виду желаемой ЛАЧХ строим фазочастотные характеристики.
2.2 Построение логарифмической амплитудно-частотной характеристики корректирующего звена системы
Учитывая то, что передаточная функция разомкнутой скорректированной системы определяется выражением.
Wск = Wнс (p) Wкз (p), (1.24)
получаем, что
Wкз (j) = Wск (j) /Wнс (j). (1.25)
Прологарифмируем (1.25) и получим
lgWкз (j) = lgWск (j) - lgWнс (j). (1.26)
Из выражения следует, что ЛАЧХ корректирующего устройства квазистационарной системы равна разности ЛАЧХ скорректированной и нескоректированной системы равна разности ЛАЧХ скорректированной и нескорректированной ЛАЧХ соответственно. Таким образом, вычитая ординаты ЛАЧХ нескорректированной системы и ординат желаемой ЛАЧХ на частотах сопряжения, получим ординаты ЛАЧХ корректирующего устройства.
Передаточная функция корректирующего звена будет иметь вид
![]() . (1.27)
. (1.27)
3 .Разработка структурной и принципиальной схем управления нестационарным динамическим объектом
3.1 Разработка структурной схемы устройства
Анализируя графики логарифмических амплитудно-частотных характеристик нескорректированной разомкнутой системы и корректирующего звена мы можем выделить основные блоки из которых состоит полученная система управления нестационарным динамическим объектом: нескорректированная система содержит форсирующее звено и два апериодических звена, а корректирующие звенья включаются в отрицательную обратную связь и делают нескорректированную разомкнутую систему замкнутой скорректированной системой управления нестационарного динамического объекта.
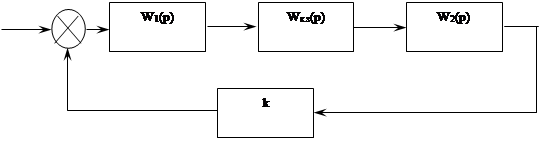 |
Структурная схема скорректированной замкнутой системы управления нестационарным динамическим объектом приведена на рис.4.
|
|
3.2 Разработка и расчет принципиальной схемы
В качестве элементной базы для реализации структурной схемы замкнутой скорректированной системы управления выбираем операционный усилитель типа К140УД7, с параметрами
Uпит = ±15, Iвх = 200 нА, Кос = 60 дБ, f = 0,8МГц, Uвых. max = 10.5 В,
Rвх = 0.4Мом, Ku = 5104 .
Основные звенья, которые используются в разработанной системе это: сумматор, усилительное звено, апериодическое звено и форсирующее звено.
Сумматор.
Внешний вид сумматора представлен на рисунке рис.4.
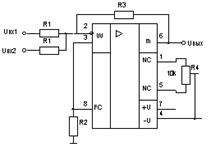
Рисунок 4 - Сумматор на основе операционного усилителя
Резисторы R1 = R2 =R3 = R4 = 20 кОм.
Усилительное звено.
Данное звено усиливает входной сигнал до уровня, необходимого для срабатывания логический элементов.
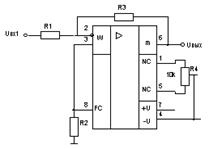
Рисунок 5 - Усилительное звено на основе операционного усилителя
Принимаем R1 = 20 кОм, тогда R2 будет равным
R3 = k*R1 .
R2 = (R1 *R3 ) / (R1 +R3 ). (1.28)
Тогда для кр = 595,28, R3 = 20000* 595,28 = 12 МОм, R2 = 20 кОм;
Апериодическое звено.
Апериодическое звено первого порядка используемое в разрабатываемом устройстве приведено на Рис.6.
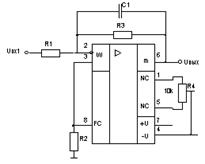
Рисунок 6 - Апериодическое звено на основе операционного усилителя
Постоянная времени апериодического звена равна
T= R*C, (1.29)
откуда прияв R1 =R3 = 20 кОм найдем
R2 = R1 /2 =10 кОм, (1.30)
Сi = Ti /R1 .
Для T2 = 0.1 c, С = 5 мкФ; Т1 = 44 с, С = 2.2 мФ;
Т3 = 0.025 с, С = 1,25 мкФ; Т2к = 0.021 с, С = 1.05 мкФ.
Форсирующее звено.
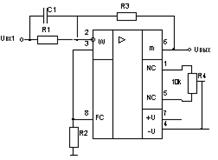
Рисунок 7 - Форсирующее звено на основе операционного усилителя
Задаемся R1 = R3 = 20 кОм, тогда
R2 = R1 /2 = 10 кОм,
Сi = Ti /R1 . (1.31)
Для Т1 = 44с, С = 2.2 мФ; Т2 = 0.1с, С = 5 мкФ;
Т1к = 0.25с, С = 12.5 мкФ; Т3 = 0.025с, С = 1.25 мкФ.
Принципиальная схема разработанного устройства приведена чертеже Э3.
Заключение
При построении системы автоматического управления использовалось несколько методов исследования объекта управления.
Метод пространства состояний позволил представить нестационарный объект управления схемой в пространстве состояний, определить вектор состояния, вектор изменения, динамическую матрицу параметров и провести исследование объекта при различных возмущающих и управляющих воздействиях, а также определить область управляемости при фиксированных возмущающих воздействиях.
Метод квазистационарности был применен для нахождения передаточной функции квазистационарного объекта и построения желаемой логарифмической амплитудно-частотной характеристики скорректированной системы по показателям качества переходного процесса, а также нахождения передаточной функции, схемы и параметров корректирующего звена.
В результате нами была разработана система автоматического управления нестационарным динамическим объектом, которая имеет достаточный запас как по фазе, так и по амплитуде.
Список литературы
1. Барковский В.В. и др. Методы синтеза систем управления. - М.: Машиностроение, 1969.
2. Володченко Г.С. Синтез адаптивной системы оптимального управления нестационарным объектом одного класса. - Республиканский науч.-тех. Сб. АСУ и приб. Автоматики. Вып.50 - Высшая школа, 1978.
3. Воронов А.А. и др. Теория автоматического управления. - М.: Высш. шк., 1977.
4. Солодов А.В., Петров Ф.С. Линейные автоматические системы с переменными параметрами. - М.: Наука, 1971.