Средства постановки помех и помехозащиты РЛС
СОДЕРЖАНИЕ: Расчет параметров помехопостановщика. Мощность передатчика заградительной и прицельной помех, средств создания пассивных помех, параметров уводящих помех. Алгоритм помехозащиты структуры и параметров. Анализ эффективности применения комплекса помех.РГРТУ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К КУРСОВОЙ РАБОТЕ
ПО ДИСЦИПЛИНЕ:
«Теоретические основы радиоэлектронной борьбы»»
Студент Козлов А. Н.
Группа 311 Специальность 210305
2007
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине:
«Теоретические основы радиоэлектронной борьбы»»
на тему: средства постановки помех и помехозащиты РЛС
Рязань 2007
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РОССИЙСКОЙ ФЕДЕРАЦИИ
РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
по дисциплине «Теоретические основы радиоэлектронной борьбы»
Студент Козлов Алексей Николаевич код________ группа 311
1. Тема: «СРЕДСТВА ПОСТАНОВКИ ПОМЕХ И ПОМЕХОЗАЩИТЫ РЛС»
2. Срок представления курсовой работы к защите « 10 » мая 2007 г.
3. Исходные данные для проектирования:
а). Исходные данные к курсовой работе:
Тип РЛС: РЛС дальнего обнаружения.
Параметры РЛС: дальность обнаружения цели не менее 290 км;
определяемые координаты цели: дальность, азимут.
Параметры цели: ЭПР цели Е=5,2 м2, максимальная скорость цели V=910 м/с;
Виды применяемых помех: пассивная, активная шумовая, уводящая по дальности.
б). Требования к проекту:
Разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
4. Обязательные разделы пояснительной записки курсовой работы
4.1. Титульный лист.
4.2. Задание на курсовую работу.
4.3. Содержание.
4.4. Введение.
4.5. Анализ задачи и ее формализация.
4.6. Расчет параметров помехопостановщика (мощность передатчика заградительной и прицельной помех, средств создания пассивных помех, параметров уводящих помех).
4.7. Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
4.8. Анализ эффективности применения комплекса помех и средств помехозащиты.
4.9. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
4.10. Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
4.11. Составление структурной схемы устройства и описание ее работы
4.12. Заключение
4.13. Список использованных источников
4.14. Графические материалы (1 л.)
Руководитель работы В.И. Кошелев
Задание принял к исполнению студент А. Н. Козлов
подпись
Содержание
1. Введение
2. Анализ задачи и ее формализация
3. Расчет параметров РЛС
4. Расчет параметров помехопостановщика
5. Расчет параметров средств помехозащиты
6. Анализ эффективности применения комплекса помех и средств помехозащиты
7. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
8. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
9. Составление структурной схемы устройства и описание ее работы
10. Заключение
11. Библиографический список
1. Введение
помехопоставщик передатчик алгоритм помехозащита
Современные радиолокационные станции (РЛС) представляют собой, как правило, сложнейшие радиотехнические комплексы, являющиеся составными элементами разветвленных систем управления. Проектирование подобных комплексов является весьма сложной задачей.
Радиолокационная станция представляет собой систему, так как она состоит из ряда элементов (антенны, передатчика, приемника, оконечного устройства), общей задачей которых является обнаружение целей и определение их местоположения при помощи электромагнитных волн.
Проектирование современных радиолокационных систем базируется на последних достижениях в различных областях радиоэлектроники. Одной из ведущих тенденций развития радиолокационных систем является автоматизация процессов обработки радиолокационной информации с помощью средств цифровой вычислительной техники.
2. Анализ задачи и ее формализация
В ТЗ поставлена задача спроектировать радиолокационную станцию дальнего обнаружения (дальность обнаружения цели не менее 290км), способную определять дальность и азимут цели с ЭПР не менее Е=5,2 м2, летящей со скоростью не более 910м/с, и предусмотреть способы борьбы с применяемыми помехами (пассивными, активными шумовыми и уводящими по дальности). Необходимо разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
Прежде чем разрабатывать алгоритмы помехопостановки и помехозащиты необходимо знать параметры РЛС. Разобьем выполнение курсовой работы на этапы:
1. Расчет параметров РЛС, при которых обеспечиваются требования ТЗ (мощность передатчика, размер антенной системы, параметры зондирующего сигнала и т. д.) в отсутствии помех.
2. Расчет помехопостановщика (количество диполей, выбрасываемых для создания пассивной помехи, мощность передатчика активной шумовой помехи, средств создания и параметров уводящих помех).
3. Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
4. Анализ эффективности применения комплекса помех и средств помехозащиты.
5. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
6. Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
7. Составление структурной схемы устройства и описание ее работы.
При выполнении этих этапов рассчитываются параметры требуемой РЛС, получается набор устройств и алгоритмов их работы, обеспечивающих постановку помех и защиту от них, а также оценка эффективности работы разработанной системы в условиях помех.
3. Расчет параметров РЛС
Для расчета параметров РЛС воспользуемся программой «Стрела». В качестве исходных данных выбираем параметры заданные в ТЗ: максимальная дальность обнаружения (290 км), максимальная скорость цели (910 м/с), минимальная ЭПР обнаруживаемой цели (5,2м2). Остальные данные при расчетах будут выбираться на усмотрение разработчика.
На первой закладке «РЛС» выбираем:
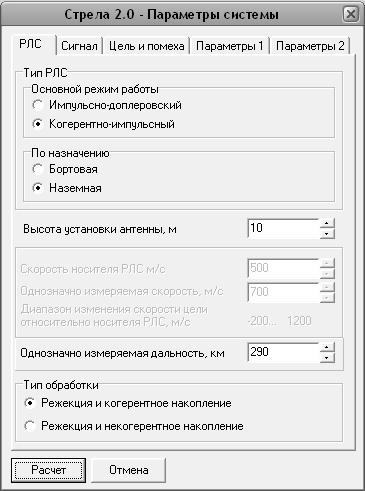
Тип РЛС: по основному режиму работы она является когерентно-импульсной, по назначению — наземной.
Высоту установки антенны выбираем равной 10м.
Однозначно измеряемую дальность выбираем в соответствии с ТЗ равной 290 км.
Тип обработки задаем: режекция и когерентное накопление, некогерентное накопление хотя и реализуется немного проще, но приводит к значительным потерям в обнаружении.
На второй закладке «Сигнал» выбираем:
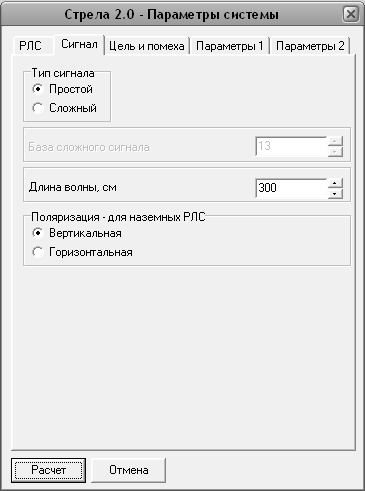
Тип сигнала. Применение сложного сигнала предпочтительней, т. к. при этом увеличивается разрешающая способность по дальности при постоянной разрешающей способности по скорости, а так как в ТЗ не поставлена задача об определении скорости, то дабы не усложнять систему воспользуемся простым сигналом.
Длина волны: 3м (для РЛС дальнего обнаружения типичны метровые волны).
Тип поляризации — вертикальная.
На третьей закладке «Цель и помеха» выбираем:
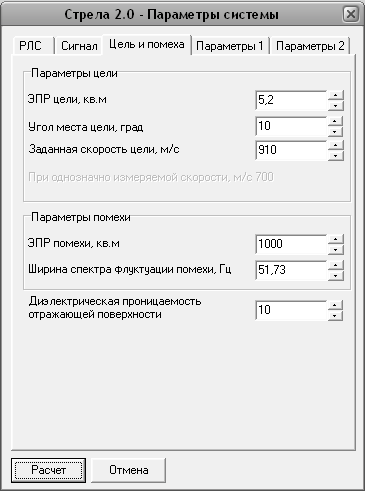
Параметры цели.
ЭПР цели задано в ТЗ и равно 5,2 м2.
Угол места цели зададим 10°.
Скорость цели выбираем из ТЗ: 910 км/ч.
Параметры помехи.
ЭПР помехи равную 1000 м2.
Ширина спектра флуктуации подбирается таким образом, чтобы ширина спектра помехи нормированная к периоду повторения РЛС находилась в пределах 0,02…0,25, зададимся значением 0,1, т. е.
![]() .
.
Период повторения можно рассчитать по формуле:
 .
.
Таким образом ширина спектра флуктуации помехи равна:
![]() .
.
Диэлектрическая проницаемость отражающей поверхности априорно неизвестна, поэтому зададимся значением 10.
На четвертой закладке «Параметры 1» выбираем:
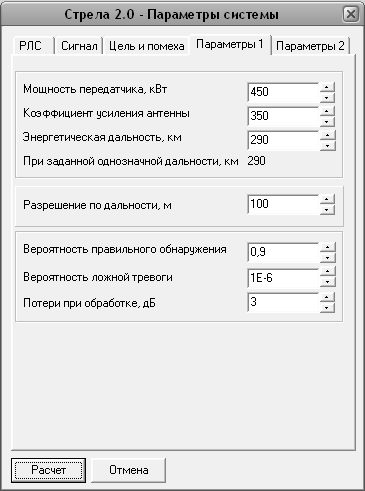
Мощность передатчика: 450 кВт.
Коэффициент усиления антенны: 350.
Энергетическую дальность равной однозначной дальности и равной 290км.
Разрешение по дальности: 100 м, что приемлемо для современных РЛС.
Вероятность правильного обнаружения равной 0,9.
Вероятность ложной тревоги равной 10-6, эти требования предъявляются современным РЛС.
Потери при обработке будут составлять 3 дБ.
На пятой закладке «Параметры 2»выбираем:
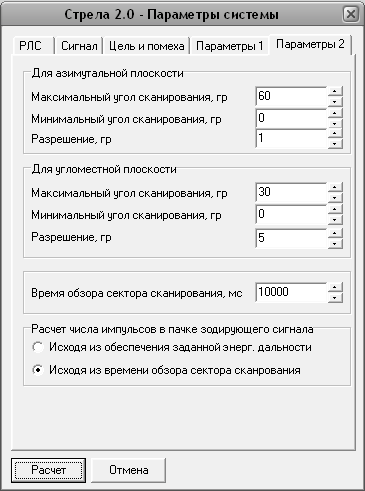
Как правило, параметры для азимутальной и угломестной плоскостей задаются в ТЗ, но так как они не заданы, выберем их.
Для азимутальной плоскости.
Максимальный угол сканирования: 60°.
Минимальный угол сканирования: 0°.
Разрешение: 1°.
Для угломестной плоскости.
Максимальный угол сканирования: 30°.
Минимальный угол сканирования: 0°.
Разрешение: 5°.
Время обзора сектора сканирования выбирается равным 10 с.
расчет числа импульсов в пачке зондирующего сигнала производится исходя из времени обзора сектора сканирования.
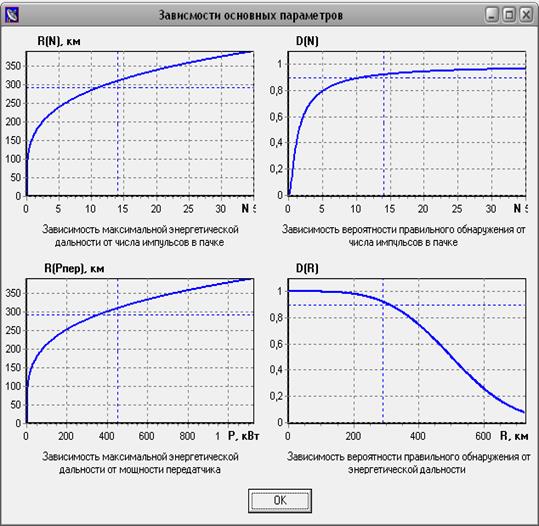
При расчете получены следующие данные:

Так же получены графики зависимости основных параметров:
4. Расчет параметров помехопостановщика
Из ТЗ следует, что противник применяет пассивные помехи, активные шумовые помехи и уводящие по дальности помехи. рассчитаем параметры постановщиков этих помех.
Пассивные помехи.
На самолете противника стоит система, которая определяет длину волны электромагнитной волны излучаемой, разрабатываемой РЛС. И на самолете нарезаются легкие ленты длинной равной половине длины волны.
Длина диполя создающего максимальное отражение зависит от толщины, если длина волны изменяется на 20%, а длина диполя сохраняется той же, то ЭПР уменьшается в 2 раза.
Ориентация диполей очень важна, но так как она случайна, то ![]() . ЭПР помехи равна 1000 м2. Следовательно требуется
. ЭПР помехи равна 1000 м2. Следовательно требуется ![]() диполей.
диполей.
Кроме простых диполей применяют широкодиапозонные металлизированные ленты, создающие отражение в более широком диапазоне частот.
Активные шумовые помехи.
Максимальная дальность действия радиолокатора в условиях радиопротиводействия определяется как:
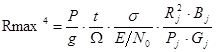
Р – мощность передатчика РЛС,
g – уровень боковых лепестков, отнесенный к уровню главного лепестка антенны,
t – время обзора сектора сканирования,
![]() - угловой объем,
- угловой объем,
– ЭПР цели,
E/N0 – отношение энергии сигнала к мощности шума на единицу полосы, необходимое для надежного обнаружения,
Rj – дальность до источника помехи,
Bj – ширина спектра помехи,
Pj – мощность помехи,
Gj – коэффициент усиления по помехе.
По этой формуле можно построить зависимость максимальной дальности от ряда параметров, как самой РЛС, так и постоновщика помех.
Коэффициент усиления антенны РЛС при приеме полезного сигнала 350; помеха принимается в основном по боковым лепесткам, примем уровень первого бокового лепестка антенны РЛС= -25дБ по мощности, тогда коэффициент усиления антенны РЛС по помехе будет равен:
![]() .
.
График зависимости дальности действия РЛС, от отношения мощностей РРЛС/РПАП, при расстоянии РЛС-ПАП 400 км
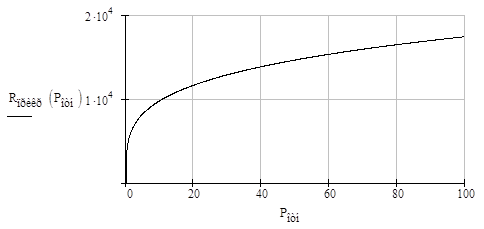
График зависимости дальности действия РЛС от расстояния РЛС-ПАП, при РПАП/РРЛС=70
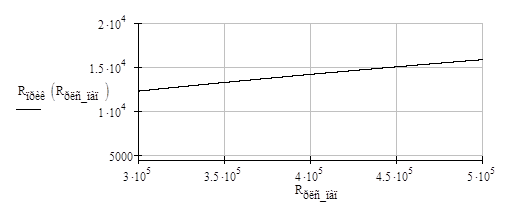
График зависимости дальности действия РЛС от Кпер=![]() , при РПАП/РРЛС=70, расстоянии РЛС-ПАП 400 км
, при РПАП/РРЛС=70, расстоянии РЛС-ПАП 400 км
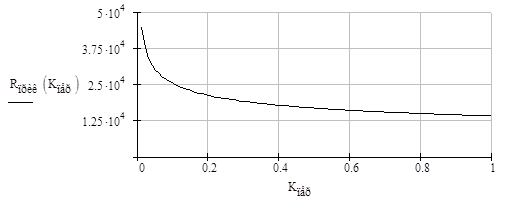
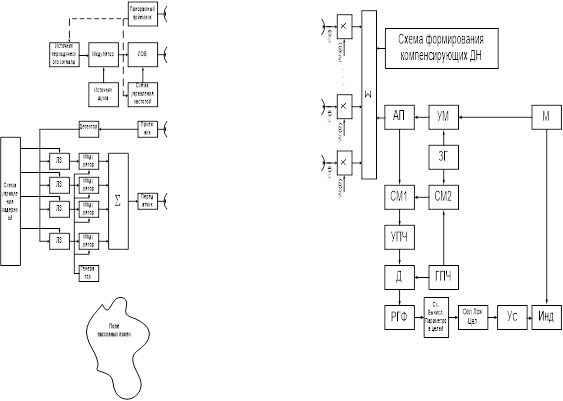
Применение АШП значительно снижает дальность действия РЛС, но при несогласованности параметров подавляемой станции и помехи, эффективность помехи значительно уменьшается, что говорит о необходимости согласования параметров помехи и подавляемой РЛС. Данные о параметрах РЛС, которую надо подавить добываются разведкой или оцениваются в режиме реального времени. Таким образом для эффективного радиоэлектронного подавления необходима обратная связь, то есть измерение параметров подавляемого объекта, фиксации структуры сигнала и режима работы. Для осуществления такого контроля необходимо создавать паузы в работе излучателя помех, что позволяет повысить эффективность средств РЭП за счет большей точности согласования параметров подавляемой станции и параметров АШП. Структурная схема постановщика АШП приведена ниже:
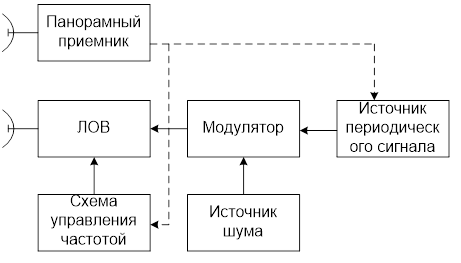
Панорамный приемник осуществляет оценку параметров подавляемой РЛС и передает их на постановщик помех. Параметры излучения постановщика АШП должны корректироваться в соответствии с данными, полученными от панорамного приемника. Схема управления частотой обеспечивает перестройку постановщика АП в требуемом диапазоне частот. Такой алгоритм работы постановщика АШП позволит максимально повысить его эффективность.
Система помехопостановки будет использовать передатчик АШП с мощностью излучения 10 кВт. Передатчик с такой мощностью излучения можно реализовать на борту летательного аппарата, а его эффективность при хорошем согласовании параметров АШП и РЛС будет высока.
Помехи уводящей по дальности.
Для создания помехи выберем ретрансляторную схему, основанную на приеме, задержке, усилении и переизлучении принятого от РЛС сигнала. Задержка сигнала, принятого от РЛС необходима для формирования требуемых дальностей до ложных целей, так как информация о дальности до цели содержится в задержке отраженного сигнала относительно зондирующего. Переизлучение принятого зондирующего сигнала обеспечивает согласование помехи и РЛС.
Необходимо нарушать работу следящей системы по дальности. Для этого необходимо совместить сигнал помехи с полезным сигналом, а затем, плавно изменяя параметры помехи «увести» систему сопровождения за ложной целью. С точки зрения РЛС необходимо обеспечить работу АСД в условиях таких помех. При наличие помех каналам сопровождения по дальности происходит срыв селекции цели, срыв сопровождения, что переводит многоцелевую РЛС в одноцелевую. Как минимум действие помех приводит к погрешности в определении дальности. Структурная схема постановщика помехи представлена ниже:
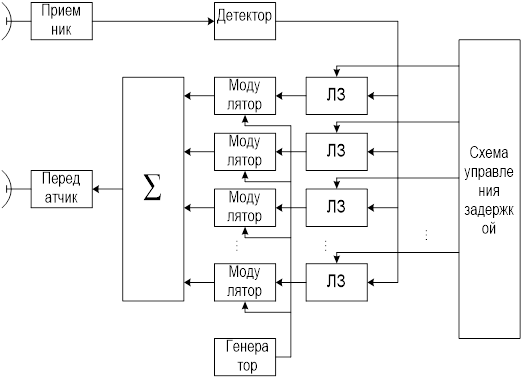
Схема управления задержкой формирует требуемые дальности до ложных целей и обеспечивает согласованность помех по каналам дальности и скорости, что исключает (или усложняет) селекцию ложных целей путем сравнения этих каналов. Модулятор «добавляет» к информации о дальности ложную информацию о других параметрах цели, получаемых из огибающей РЛ сигнала, его частотной модуляции, мощности. Генератор формирует несущую частоту излучаемой помехи. Сумматор суммирует сигналы, формируемые различными каналами, для дальнейшего излучения одной антенной системой.
При действии помех большого уровня система АРУ уменьшает усиление, что приводит к потере реальных сигналов, но, в тоже время, чрезмерно высокий уровень помехи может служить, для системы селекции помех, признаком позволяющим отсеять помеху, поэтому мощность помехи на входе РЛС не должна превышать уровень сигнала более чем в 3..5 раз. Применение помехи с изменяющимся уровнем мощности увеличит вероятность захвата уводящей помехи системой АСД в случае неизвестной дальности РЛС-ПАП, или в случае неизвестного алгоритма селекции помех в РЛС.
Отношение мощности АП к мощности сигнала, отраженного от цели, на входе РЛС, описывается выражением:
Из этой формулы можно рассчитать мощность передатчика АП (РперАП), необходимую, для создания на входе приемника РЛС отношения РАП/Рс=3.
![]()
При расстояниях РЛС-цель 200 км и РЛС-ПАП 400 км, GАП=100, GРЛС=350, G=1.1, РперРЛС=450 кВт для формирования на входе РЛС отношения РАП/Рс=3 необходима мощность передатчика уводящей помехи РАП равная нескольким мВт. Суммарная мощность передатчика уводящей помехи не будет превышать нескольких Вт, что упрощает его реализацию. Зададим мощность передатчика уводящей помехи 2 Вт.
5. Расчет параметров средств помехозащиты
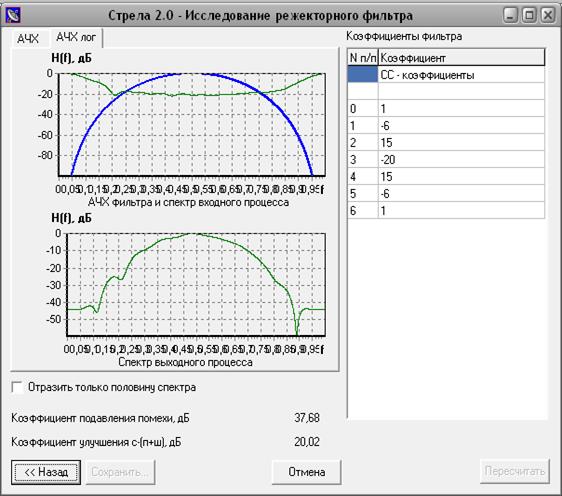
Для подавления пассивных помех, действующих на РЛС будет использован режекторный фильтр, а именно линейный режекторный фильтр с симметричными весовыми коэффициентами, который реализуем при помощи программы «Стрела».
Отношение шум/помеха на входе РЛС = -37,7дБ.
Режекторный фильтр должен подавлять помеху до уровня шумов, следовательно коэффициент подавления помехи должен составлять около 37,7дБ.
На первой закладке «Фильтр» выбираем:
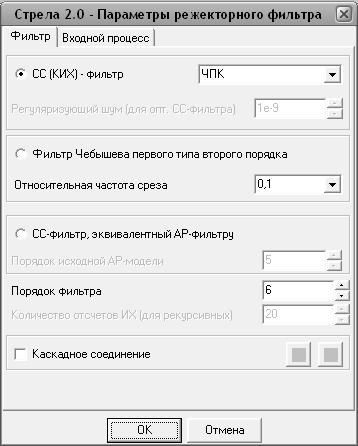
Тип фильтра СС(КИХ)-фильтр ЧПК. Порядок фильтра задаем так, что бы число импульсов в пачке было не меньше, чем порядок фильтра +1.
На второй закладке «Входной процесс» выбираем:
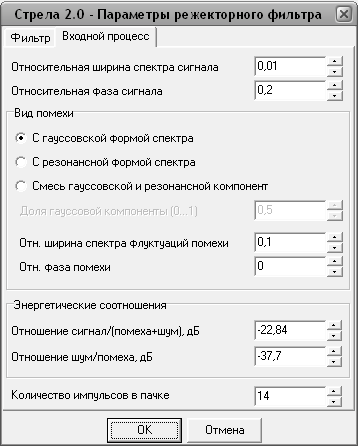
Относительную ширину спектра сигнала: 0,01.
Относительную фазу сигнала: 0,2.
Вид помехи: с гауссовской формой спектра.
Относительную ширину спектра флуктуаций помехи: 0,1.
Относительную фазу помехи: 0,2.
Отношение с/(п+ш): -22,84 дБ.
Отношение ш/п: -37,7 дБ.
Количество импульсов в пачке 14.
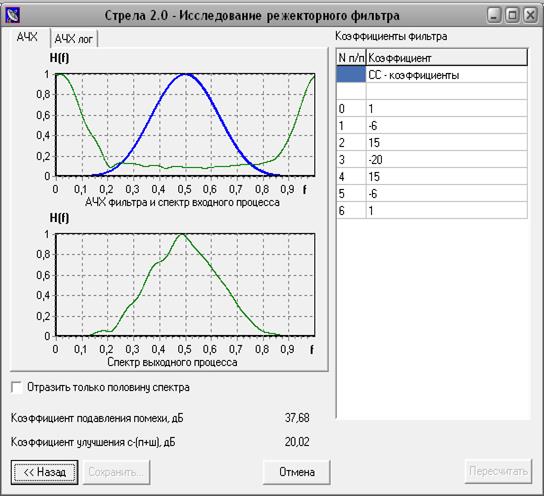
Программа посчитала, что коэффициент подавления помехи равен 37,68 дБ, что приемлемо, так как далее будет использоваться накопление сигнала. Симметричность коэффициентов относительно центрального будет обеспечивать линейность ФЧХ фильтра.
АЧХ и ЛАЧХ приведены ниже:
Структурная схема цифрового режекторного фильтра, приведена ниже:
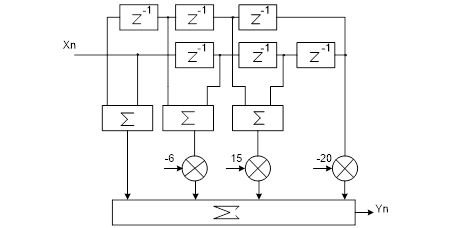
Для нормальной работы фильтра необходимо, чтобы на его вход поступало не менее N отсчетов, (где N порядок режекторного фильтра). Посредством остальных 14-6=8 отсчетов можно произвести когерентное накопление.
На антенну РЛС поступают активные помехи, полезный сигнал и шум, где они смешиваются, образуя входную реализацию. При взаимодействии АП и полезного сигнала происходит полное или частичное их совпадение во времени, перекрытие по частоте и различие в направлении прихода радиоволн.
Алгоритм обработки сигналов АП разделяют на два этапа: пространственный и временной. С помощью пространственного фильтра производится обработка сигнала в пространстве. Фильтр осуществляется соответствующим построением антенной системы. Далее идет временная обработка сигнала.
Один из алгоритмов пространственного подавления помех основан на использовании адаптивных ФАР (в канале обработке каждого элемента ФАР необходим весовой усилитель или аттенюатор и фазовращатель для настройки на заданное направление приема сигнала). ФАР позволяет производить электрическое управление сканирования луча, формировать несколько лучей, быстро перемещать луч ДН. Однако использование ФАР требует существенного усложнения антенной системы за счет введения дополнительных элементов, поэтому для системы помехозащиты выберем устройство подавления с деформацией ДН антенны, которое позволяет сформировать провал диаграммы направленности в направлении на источник помех (для этого требуется дополнительная антенна). Структурная схема устройства формирования провала ДН антенны приведена ниже:
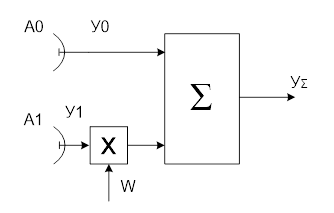
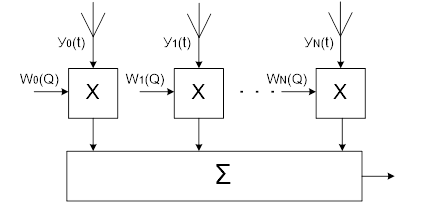
Исходные ДН основной и компенсационной антенн f0(Q), f1(Q). Результирующая ДН антенной системы f(Q)= f0(Q)+Wf1(Q). Если Q1 – угол прихода помехи, то для компенсации необходимо выполнение условия f(Q1)=0, откуда W= - f0(Q1) /f1(Q1). Подставив W в формулу f(Q), получим f(Q)= f0(Q)-[f0(Q1) /f1(Q1)]f1(Q). Таким образом, в направлении на источник помехи образуется провал в ДН антенны. Если помехи действуют с различных направлений, то необходимо применение нескольких компенсирующих антенн. Структурная схема устройства пространственной обработки для подавления нескольких пространственных помех приведена ниже.
Во временной области возможно применение устройства компенсации помех с корреляционными обратными связями. Основная антенна принимает помеху, а компенсационная антенна принимает помеху от того же источника, отличающуюся по фазе. Используя сигналы этих каналов, можно сформировать компенсатор с корреляционными обратными связями, в котором компенсируется помеха. Такое устройство обеспечивает минимум среднего квадрата напряжения помехи на выходе фильтра. Коэффициенты фильтра должны вычисляться в режиме реального времени, для наиболее эффективного подавления помехи. Структурная схема фильтра приведена ниже.
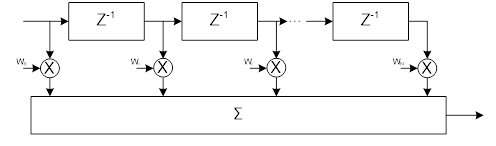
Если порядок фильтра (N) равен 5, то 6 импульсов пачки потребуется на завершение переходного процесса, оставшиеся 8 импульсов можно использовать для накопления.
Если помеху не удается отфильтровать, то можно увеличить дальность действия РЛС за счет увеличения времени накопления сигнала (увеличения числа импульсов в принимаемой пачке). Но так как зависимость между дальностью действия РЛС и временем накопления «слабая» (R~![]() ), возможности увеличения дальности действия РЛС за счет увеличения числа импульсов пачке сильно ограничены. Для увеличения дальности действия в 2 раза необходимо увеличить число импульсов в 16 раз (при когерентном накоплении). Кроме того, возможно увеличение дальности действия РЛС за счет увеличения КНД антенны или увеличения мощности передатчика, но это сопряжено с большими трудностями (проще изготовить новую РЛС, чем увеличить мощность старой, увеличение КНД требует изготовления новой антенной системы) поэтому на практике не применяется.
), возможности увеличения дальности действия РЛС за счет увеличения числа импульсов пачке сильно ограничены. Для увеличения дальности действия в 2 раза необходимо увеличить число импульсов в 16 раз (при когерентном накоплении). Кроме того, возможно увеличение дальности действия РЛС за счет увеличения КНД антенны или увеличения мощности передатчика, но это сопряжено с большими трудностями (проще изготовить новую РЛС, чем увеличить мощность старой, увеличение КНД требует изготовления новой антенной системы) поэтому на практике не применяется.
Кроме того, для борьбы РЛС с АШП можно использовать следующие приемы:
1. Работа РЛС в короткие промежутки времени
2. Смена несущих частот.
3. Применение многочастотных РЛС.
4. Использование сложных сигналов.
5. Использование длительного когерентного накопления.
Для селекции уводящих помех применим алгоритм, основанный на сравнении скорости, полученной из канала дальности косвенным методом, с порогом скорости l0(максимально возможной скоростью летательного аппарата плюс небольшой запас на погрешность измерения).
![]()
В техническом задании указана максимально возможная скорость летательного аппарата 910 м/с, при погрешности вычисления скорости ±10% зададим порог скорости l0 на уровне 1000 м/с.
Для каждой цели должно проводиться вычисление скорости и сравнение ее с порогом. В случае превышения порога цель необходимо классифицировать как ложную, должен производиться срыв слежения.
6. Анализ эффективности применения комплекса помех и средств помехозащиты
Мерой эффективности режекторного фильтра служит достигнутый, коэффициент подавления. В нашем случае он равен 37,68 дБ, т.е. пассивную помеху фильтр подавляет до уровня шумов. Таким образом, помеха практически полностью исключается из дальнейшей обработки. Однако надо заметить, что в месте с помехой будет режектирован также сигнал от малоскоростных целей и целей имеющих только тангенциальную составляющую скорости, летящих перпендикулярно направлению излучения РЛС.
Также критерием эффективности служит коэффициент улучшения отношения с/п, в спроектированном фильтре он составляет 20,02 дБ.
При расчете параметров помехопостановщика АШП был установлено, что при согласовании параметров АШП с параметрами РЛС дальность действия РЛС снижается в несколько раз, при этом, в случае применения противоборствующей стороной средств помехозащиты, возможно уменьшение влияния помех
Смена несущих частот и другие меры помехозащиты затрудняют согласование параметров помехи с РЛС. Если постановщик помех не будет успевать подстраивать свои параметры, то можно добиться полного исключения влияния помех на РЛС.
Действие уводящей помехи заключается в нарушение работы следящей системы по дальности, но при сравнении каналов дальности и скорости система селекции ложных целей имеет возможность выявить ложные цели. В нашем случае РЛС имеет лишь канал дальности, поэтому возможности для селекции помех ограничены (невозможно сравнить информацию канала дальности с каналом скорости). Из этого можно сделать вывод, что при излучении согласованных помех, РЛС не имеет возможности для качественной селекции ложных целей и вероятность поражения РЛС уводящими помехами довольно высока. Как уже говорилось, возможна селекция помех по уровню мощности, но опять же при излучении «качественной» помехи возможности селекции ограничены.
Вероятность выполнения РЛС своих задач в условиях постановки АШП и уводящих помех будет равна произведению вероятностей работы РЛС в отсутствии помех, вероятности работы РЛС в условиях постановки АШП, вероятности работы РЛС в условиях применения уводящей помехи. Если вероятность работы РЛС в отсутствии помехи равна 0,9, вероятность работы РЛС в случае применения АШП равна 0,5 (из приведенных ранее рассуждений ясно, что АШП сильно влияет на работу РЛС), вероятность работы РЛС в условиях применения уводящей помехи равна 0.5, то
![]() Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно.
Видно, что выполнение РЛС своих задач, в условиях применения комплекса помех, почти невозможно.
Не стоит забывать, что устройства постановки помех, так же как и устройства борьбы с ними, динамично развиваются. Чаще всего средства нападения оказываются «сильнее», а адекватные меры противодействия появляются лишь через некоторое время, поэтому оценить эффективность средств помехозашиты и помехопостановки затруднительно. Каждой конкретной ситуации будут соответствовать свои особенности, а исход «сражения» будет зависеть от способности каждой из систем к адаптации и эффективности применяемых алгоритмов. Применение в настоящее время систем не способных к адаптации является столь же «расточительным», как и применение некогерентной обработки в активной радиолокации.
7. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
Цифровые режекторные гребенчатые фильтры подавления помех требуют предварительного преобразования сигналов в цифровую форму с помощью АЦП. В таких устройствах производиться дискретизация по времени, с дискретом ![]() . Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета
. Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета ![]() , где m — число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к цифровым режекторным гребенчатым фильтрам в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
, где m — число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к цифровым режекторным гребенчатым фильтрам в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
При работе РЛС к системе обработки данных предъявляется требование реализации обработки данных в реальном масштабе времени. Оно является необходимым, поэтому вычислительная система должна обеспечивать решение этой задачи.
Для определения требований к вычислительной системе оценим общее число каналов РЛС, и, зная длительность зондирующего импульса, рассчитаем необходимое быстродействие системы (за время равное длительности зондирующего импульса система должна успевать обрабатывать все каналы).
Число каналов дальности: ![]() ,
,
![]() .
.
Число каналов по скорости равно числу импульсов в пачке, но так как определение скорости не входит в задачи проектируемой РЛС, то каналы по скорости не требуются.
Число каналов по угловым координатам ![]() .
.
Общее число каналов ![]() .
.
При разрешающей способности по дальности 100 м длительность импульса равна ![]() . За это время должно быть обработано 2900 каналов дальности (угловые каналы будут обрабатываться поочередно). Темп обработки
. За это время должно быть обработано 2900 каналов дальности (угловые каналы будут обрабатываться поочередно). Темп обработки ![]() операций в секунду. Если учесть, что под операцией понимается довольно сложный алгоритм действий, то станет ясно, что обеспечить такую скорость вычислений одним устройством, на сегодняшнем этапе развития вычислительной техники, невозможно. Для реализации такого количества вычислений необходимо использовать параллельную обработку, когда вычисления производятся не одним устройством, а несколькими. Это позволит снизить требования к вычислительным устройствам, но приведет к удорожанию системы.
операций в секунду. Если учесть, что под операцией понимается довольно сложный алгоритм действий, то станет ясно, что обеспечить такую скорость вычислений одним устройством, на сегодняшнем этапе развития вычислительной техники, невозможно. Для реализации такого количества вычислений необходимо использовать параллельную обработку, когда вычисления производятся не одним устройством, а несколькими. Это позволит снизить требования к вычислительным устройствам, но приведет к удорожанию системы.
Схема формирования провалов ДН в направлении прихода АП должна успевать отслеживать изменяющуюся помеховую обстановку (если учесть, что постановщики помех чаще всего располагаются на борту ЛА, на больших расстояниях от РЛС, то, скорее всего, скорость изменения направления прихода АП не велика, что позволяет своевременно изменять параметры антенн).
Система селекции целей должна быть рассчитана на возможность применении уводящих помех и обеспечивать их селекцию без потерь реальных целей (вычислительная система должна быть многоканальной и быстродействующей, что затрудняет выполнение данного требования). Чаще всего применяют системы, рассчитанные на строго определенное число целей. Для РЛС дальнего обнаружения примем максимальное число целей равным 40.
Средства помехопастановки ПП должны иметь на борту аппаратуру для измерения длины волны излучаемых колебаний, для того, что бы выкидывать диполи требуемой длины.
Средства помехопостановки должны обеспечивать соответствующую скорость перестройки центральной частоты излучаемой помехи, чтобы эффективно отслеживать изменения параметров сигнала РЛС. Скорость перестройки постановщика помех должна быть больше максимальной скорости перестройки РЛС, кроме того, система постановки АП должна успевать оценивать параметры подавляемой РЛС. То есть «скоростные» требования, предъявляемые к постановщику помех, гораздо выше, чем подобные требования, предъявляемые к РЛС.
Если РЛС работает на одной частоте в течение Т=2с, то ПАП за это время должен успеть отследить изменение частоты (например 20% от Т) и перестроиться на новую частоту (например 30% от Т), тогда на подавление остается 50% от Т, в нашем случае это 1с. Чем медленнее ПАП оценивает параметры и чем медленнее перестраивается, тем больше времени РЛС работает беспрепятственно. В рассмотренном примере ПАП должен обеспечить измерение за 0,4с, перестройку за 0,6с. При увеличении скорости перестройки РЛС, скорость ПАП так же должна увеличиваться. Современные системы перестройки частоты позволяют перестраивать частоту до 128 раз в секунду и выше, ПАП должен перестраиваться со скоростью не меньше этой.
Постановщик уводящих помех требует наличия запоминающего устройства и управляемых линий задержки, что не составляет особых трудностей. Наиболее важен алгоритм формирования помехи и алгоритм «увода» РЛС вслед за ложной целью, который должен обеспечивать согласованность всех параметров помехи. «Основы» алгоритмов изложены выше, а каждой конкретной ситуации будут соответствовать свои особенности. Целесообразно иметь целый набор подобных алгоритмов.
8. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
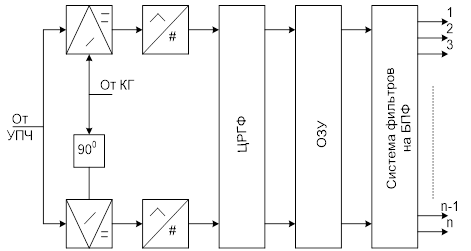
Реализация фильтровых устройств возможна на фильтрах с быстрым преобразованием Фурье (БПФ), или на микропроцессорах. Всё большую роль в цифровой обработке радиолокационной информации начинают играть программируемые логические интегральные микросхемы (ПЛИС), которые обладают гибкой структурой и возможностью смены программы, в отличие, например от микропроцессоров. Реализация типового фильтрового устройства обнаружителя движущихся целей (ОДЦ) многоканально по дальности и скорости. Каналы дальности реализуются либо с помощью селекторов дальности в УПЧ, либо с помощью коммутации ячеек ОЗУ. Каналы скорости образуются ЦФ с помощью БПФ. Селекторы дальности обеспечивают поступление в каждый из m каналов сигналов только с одного элемента разрешения по дальности. В цифровом фильтровом устройстве ОДЦ с подавлением помех информация в ЦРГФ записывается в оперативное запоминающее устройство(ОЗУ), а затем фильтруется на основе n-точечного, алгоритма БПФ. Структурная схема цифрового фильтрового устройства приведена ниже:
9. Составление структурной схемы устройства и описание ее работы
Из приведенных ранее рассуждений известно, что разрабатывается когерентная система. Ниже приведен один из возможных вариантов построения истинно когерентного радиолокатора высокой скважности.
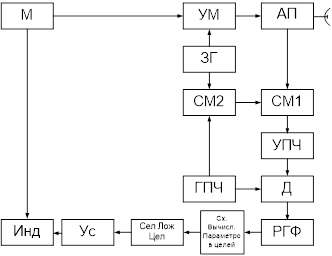
Передатчик построен по многокаскадному принципу. Стабильные колебания задающего генератора усиливаются в усилителе мощности. Одновременно в этом же каскаде происходит импульсная модуляция сигнала.
С помощью смесителя СМ2 на который подаются колебания задающего генератора и генератора промежуточной частоты, формируется гетеродинный сигнал, используемый для преобразования частоты принимаемых колебаний в смесителе СМ1. Усиленные в УПЧ сигналы сравниваются с опорным колебанием генератора промежуточной частоты на детекторе. Сигнал биений подается на режекторный фильтр, который осуществляет селекцию сигналов движущихся целей. После этого производится вычисление параметров целей, затем производится селекция ложных целей. После усиления в усилителе сигналы движущихся целей подаются на индикатор. Ниже приведена структурная схема, отображающая взаимодействие конфликтующих сторон.
10. Заключение
В ходе данной курсовой работы была освоена методика нахождения параметров РЛС с помощью программы «Стрела», а так же оценены возможности постановщиков различных помех и методы борьбы с ними. Определена структура средств помехопостановки и помехозащиты.
11. Библиографический список
1. Бакулев П. А.. Радиолокационные системы: Учебник для вузов. – М.: Радиотехника, 2004, 320 с., ил.
2. Финкельштейн М. И. Основы радиолокации: Учебник для вузов. – 2-е изд, перераб. и доп. – М.: Радио и связь, 1983. – 536 с., ил.
3. Попов Д. И. Проектирование радиолокационных систем: Учебное пособие, Рязань 1975.
4. Справочник по радиолокации. Под ред. М. Сколника. Нью-Йорк, 1970. Пер. с англ. (в четырех томах) под общей ред. К. Н. Трофимова. Том 1. Основы радиолокации. Под ред. Я. С. Ицхоки. М., «Сов. радио», 1976, 456 с.
5. Бакулев П. А. Радиолокация движущихся целей: Учебник для вузов. – М.: «Сов. радио», 1964, 336 с.
6. Радиолокационные устройства (теория и принципы построения) под ред. В. В. Григорина-Рябова: М., «Советское радио», 1970, стр. 680.
7. Основы системного проектирования радиолокационных систем и устройств: Методические указания по курсовому проектированию по дисциплине «Основы теории радиотехнических систем»: Рязан. гос. радиотехн. акад.; Сост.: В. И. Кошелев, В. А. Федоров, Н. Д. Шестаков. Рязань, 1995, 60 с.