Стабилизизация температуры воздуха в теплицах
СОДЕРЖАНИЕ: Методы стабилизации температуры воздуха в остеклённых блочных теплицах с водяной системой обогрева, где температура воздуха регулируется за счёт изменения температуры теплоносителя с помощью смесительного клапана. Принцип автоматического управления.МИНИСТЕРСТВО СЕЛЬСКОГО ХОЗЯЙСТВА И ПРОДОВОЛЬСТВИЯ РЕСПУБЛИКИ БЕЛАРУСЬ
Учреждение образования
БЕЛОРУССКИЙ ГОСУДАРСТВЕННЫЙ АГРАРНЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Кафедра автоматизированных систем управления производством
КУРСОВАЯ РАБОТА
по дисциплине «Теория автоматического управления»
Вариант 1
Выполнил: студент гр.2эа Алейчик Д.В.
проверил:
к.т.н., доцент Матвеенко И.П.
Минск – 2009
Содержание
1. Задание
2. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы. Принцип автоматического управления и вид системы
3. Составление структурной схемы системы
4. Определение закона регулирования системы
5. Определение передаточных функций системы по управляющему и возмущающему воздействиям и для ошибок по этим воздействиям
6. Анализ устойчивости системы. Определение запасов устойчивости
7. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему
8. Совместный анализ изменения управляемой величины объекта управления и системы от возмущающего воздействия в статике. Определение статической ошибки системы по возмущающему воздействию
9. Оценка качества управления переходным функциям
Общие выводы по работе
Литература
1. Задание
Параметры.
| Вариант | Схема | ||||||||||||
| 00 | 16 | 0.5 | 1 | 600 | 0.4 | 30 | 10 | 0.017 | 0.1 | 25 | 1 | ---- | 0.5 |
Схема.
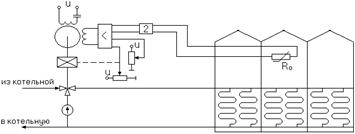
Схема стабилизирует температуру воздуха в остеклённых блочных теплицах с водяной системой обогрева. Температура воздуха регулируется за счёт изменения температуры теплоносителя с помощью смесительного клапана. Основное возмущающее воздействие – изменение температуры наружного воздуха. Датчик температуры воздуха в теплице – термометр сопротивления. На схеме: 2 – измерительный блок, преобразующий величину сопротивления датчика температуры в электрическое напряжение. Устройство сравнения выполнено на дифференциальном усилителе.
2. Характеристика объекта управления, описание устройства и работы САР, составление её функциональной схемы. Принцип автоматического управления и вид системы
САР температуры воздуха в теплице состоит из объекта управления и регулятора. Объектом управления (ОУ) рассматриваемой САР является теплица.
Регулируемой величиной является температура ![]() воздуха в теплице.
воздуха в теплице.
Целью управления является поддержание температуры воздуха в теплице на постоянном заданном уровне.
Управляющим воздействием на ОУ является температура, возмущающее воздействие – изменение температуры наружного воздуха.
Датчиком (Д) является термометр сопротивления вместе с измерительным блоком. Входной сигнал – температура воздуха в теплице ![]() , выходной – u на выходе измерительного блока.
, выходной – u на выходе измерительного блока.
Зададчиком является переменное сопротивление R. Задающий сигнал – падение напряжения на этом сопротивлении ![]() .
.
Сравнивающее устройство выполнено на дифференциальном усилителе. Выходным сигналом являются величины напряжений u и ![]() . Выходным – разность этих напряжений:
. Выходным – разность этих напряжений: ![]() , которое соответствует в определённом масштабе ошибке регулирования.
, которое соответствует в определённом масштабе ошибке регулирования.
Дифференциальный усилитель (ДУ) выполняет функции устройства сравнения (вычитания) входных сигналов и усиления их разности. На входной усилитель поступает напряжение сравнения ![]() и
и ![]() (устройство местной обратной связи). Выходной сигнал усилителя – напряжение
(устройство местной обратной связи). Выходной сигнал усилителя – напряжение ![]() , подаваемое на электродвигатель.
, подаваемое на электродвигатель.
Исполнительное устройство представляет собой исполнительный механизм, который состоит из электродвигателя и редуктора. Входной сигнал для электродвигателя – напряжение ![]() , выходной сигнал – угол
, выходной сигнал – угол ![]() поворота вала электродвигателя. Входной сигнал для редуктора -
поворота вала электродвигателя. Входной сигнал для редуктора - ![]() , выходной сигнал - угол
, выходной сигнал - угол ![]() поворота вала редуктора.
поворота вала редуктора.
Устройство местной обратной связи (УОС) выполнено в виде потенциометрического датчика перемещения, подвижный контакт которого механически связан с выходным валом редуктора. Входной сигнал УОС – угол ![]() , выходной – напряжение
, выходной – напряжение ![]() .
.
Система работает следующим образом.
При равенстве температур ![]() ,
, ![]() и на вход дифференциального усилителя сигнал не поступает и напряжение
и на вход дифференциального усилителя сигнал не поступает и напряжение ![]() .
.
При отклонении температуры в теплице от заданной, на вход ДУ поступает разность напряжений ![]() . Усиленное напряжение
. Усиленное напряжение ![]() подаётся на электродвигатель, который через редуктор поворачивает клапан и тем самым изменяет расход воды через вентиль , м2
/c.
подаётся на электродвигатель, который через редуктор поворачивает клапан и тем самым изменяет расход воды через вентиль , м2
/c.
Одновременно выходной вал редуктора перемещает подвижный контакт потенциометрического датчика местной обратной связи, выходное напряжение которого находится на дифференциальном усилителе, где вычитается из напряжения uМ разбаланса моста. Усилитель усиливает разность напряжений uМ и uOC . За счёт местной обратной связи обеспечивается пропорциональная зависимость между напряжением uМ и углом поворота вала редуктора Р . Поэтому изменение напряжения uМ на нагревательном элементе (управляющее воздействие на объект) пропорционально величине отклонения температуры в теплице от заданного значения З . В результате температура в теплице возвращается к заданному значению.
При непрерывном изменении наружной температуры процесс регулирования идёт непрерывно. Если наружная температура установится, то при правильно подобранных параметрах регулятора процесс регулирования через некоторое время закончится, и вся система придёт в новое установившееся состояние.
Вывод: 1. Система является стабилизирующей.
2. В системе реализован принцип управления по отклонению.
3. Составление структурной схемы системы
Для этого получим передаточные функции всех элементов системы.
1. Уравнение теплицы как элемента управления.
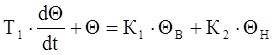
Изображение Лапласа этого уравнения.
![]()
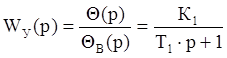
Передаточная функция климатической камеры по управляющему воздействию В :
Передаточная функция климатической камеры по возмущающему воздействию Н :
2. Датчик температуры Д с измерительным блоком.
![]()
3. Задатчик З
![]()
![]()
![]()
4. Сравнивающее устройство выполнено на дифференциальном усилителе, поэтому оно будет учтено в уравнении дифференциального усилителя.
5. Дифференциальный усилитель ДУ.
![]()
Первое звено осуществляет вычитание напряжения uОС из напряжения u.
u = u – uOC
Второе звено усиливает разность u.
![]()
![]()
6. Двигатель Д:
![]()
7. Редуктор Р
![]()
![]()
8. Устройство (потенциометр) обратной связи УОС.
![]()
![]()
9. Регулирующий орган – смесительный клапан (К)
![]()
![]()
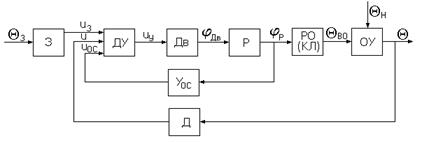
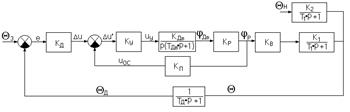
Структурная схема системы
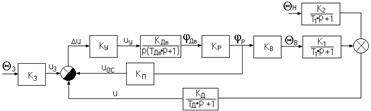
Задатчик (З) системы является безинерциальным. Его коэффициент передачи кЗ должен быть равен коэффициенту передачи кД датчика, поскольку заданная З и действительная температуры должны вычитаться в одном масштабе. Поэтому для наглядности исследования эти коэффициенты кД = кЗ можно перенести за СУ и считать, что из заданной температуры З непосредственно вычитается измеренная датчиком температура Д и формируется сигнал ошибки е. Получаем преобразованную структурную схему.
4. Определение закона регулирования системы
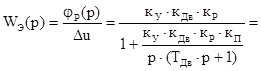
Найдём передаточную функцию, определяющую взаимосвязь управляющего воздействия В на объект и ошибки е.
![]()
Предварительно заменим звенья, охваченные линейной обратной связью (УОС ) с коэффициентом передачи кП одним эквивалентным звеном.
 , где
, где
WП (p) – передаточная функция прямой цепи;
WР (p) – передаточная функция разомкнутой цепи;
WОС (p) – передаточная функция обратной связи;
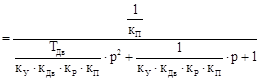
Подставим в найденное выражение численные значения коэффициентов и получим.

При последовательном соединении звеньев их передаточные функции перемножаются, поэтому
![]()
Окончательно для безинерционного регулятора получаем.
![]()
Зависимость управляющего воздействия В от ошибки е показывает, что в рассматриваемой системе применяется – закон регулирования.
5. Определение передаточных функций системы по управляющему и возмущающему воздействиям и для ошибок по этим воздействиям
Передаточная функция САР по управляющему воздействию.
![]() , где
, где
WП (p) – передаточная функция прямой цепи системы;
WР (p) – передаточная функция разомкнутой системы;
WОС (p) – передаточная функция обратной связи системы;
![]()
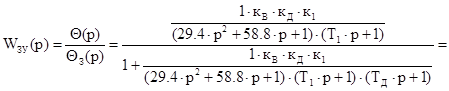

Подставим в полученное выражения численные значения параметров и после промежуточных преобразований получим:

Передаточная функция САР по возмущающему воздействию.
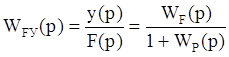 , где
, где
WF (p) – передаточная функция цепи звеньев от места приложения возмущающего воздействия до регулируемой величины.
Для рассматриваемого примера передаточная функция САР температуры в теплице по возмущающему воздействию.
![]()
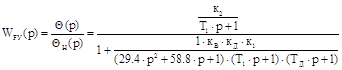
Передаточная функция САР для ошибки по управляющему воздействию.


Подставляем в полученное выражение численные значения параметров.
![]()
Передаточная функция САР для ошибки по возмущающему воздействию.

Для рассматриваемого примера передаточная функция САР температуры в климатической камере для ошибки по возмущающему воздействию Н .
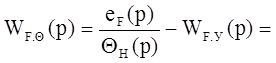
![]()
6. Анализ устойчивости системы. Определение запасов устойчивости
Анализ устойчивости по критерию Гурвица.
Определим устойчивость САР температуры воздуха в теплице. Для этого воспользуемся любой из полученных в п.4 передаточных функций системы, из которых следует, что характеристическое уравнение системы имеет вид:
![]()
Все коэффициенты характеристического уравнения положительны, что соответствует 1–му условию устойчивости для уравнения четвёртой степени.
Второе условие устойчивости.
![]()
![]()
![]()
Полученный результат показывает, что система устойчива.
Анализ устойчивости по критерию Найквиста.
Определим устойчивость САР температуры в теплице.
Передаточная функция разомкнутой системы.

Для определения устойчивости системы строим график, для чего рассчитываем значения модуля А() и аргумента () для разных значений .
![]()
![]()


| 0 | 0.001 | 0.0015 | 0.002 | 0.0025 | 0.003 | 0.004 | 0.005 | 0.007 | ||
| A() | 5 | 4.3 | 3.7 | 3.2 | 2.7 | 2.3 | 1.9 | 1.5 | 1 | |
| () | 0 | 36 | 50 | 60 | 69 | 76 | 87 | 96 | 111 | |
| 0.009 | 0.01 | 0.015 | 0.02 | 0.03 | 0.04 | 0.045 | 0.05 | 0.07 | ||
| А() | 0.78 | 0.68 | 0.4 | 0.23 | 0.1 | 0.05 | 0.039 | 0.03 | 0.012 | |
| () | 123 | 127 | 149 | 166 | 190 | 206 | 212 | 217 | 237 |
Определение запасов устойчивости.
 - что соответствует требуемым условиям.
- что соответствует требуемым условиям.
7. Анализ зависимости статической ошибки системы от изменения управляющего воздействия на систему

в статике (при р = 0) получим:
![]()
где к – коэффициент передачи разомкнутой системы.
Таким образом:
![]()
Рассматриваемая система имеет статическую ошибку, пропорциональную изменению управляющего воздействия на систему.
8. Совместный анализ изменения управляемой величины объекта управления в статике. Определение статической ошибки системы по возмущающему воздействию
Передаточная функция САР по возмущающему воздействию.

В статике при р = 0 получаем:
![]()
где ![]()
= Н – для объекта без регулятора.
= 0.17Н – для объекта, снабжённого регулятором.
9. Оценка качества управления по переходным функциям
Отклонение регулируемой величины от своего установившегося значения.
Для переходной функции по управляющему воздействию, определяющему воздействию, определяется перерегулирование:
где hmax 1 – максимальное значение регулируемой величины в переходном процессе.
hУСТ – установившееся значение регулируемой величины.
Для нашего примера:

Нормальным считается перерегулирование ![]()
Перерегулирование характеризует запас устойчивости системы. В нашем случае запас устойчивости достаточен. Для переходных процессов по возмущающему воздействию определяем максимальное отклонение регулируемой величины от установившегося значения, приходящееся на единицу возмущающего воздействия.
![]()
![]()
Быстродействие системы оценивается временем регулирования.
![]()
Примем = 0.05hУСТ.
Для переходной функции по управляющему воздействию:
![]()
Для переходной функции по возмущающему воздействию:
![]()
Колебательность переходного процесса.
Для рассматриваемого примера N = 1
Обычно приемлемым числом колебаний считается ![]() . Колебательность также оценивается отношением соседних отклонений регулируемой величины от установившегося значения.
. Колебательность также оценивается отношением соседних отклонений регулируемой величины от установившегося значения.
С = (hmax 2 - hУСТ )/(hmax 1 - hУСТ )
Для переходного процесса по управляющему воздействию:
![]()
Для переходного процесса по возмущающему воздействию:
Статическая ошибка системы.
е = hЗАД - hУСТ = 1 – 0.83 = 0.17
Статическая ошибка по возмущающему воздействию.
е = (ЗАД – УСТ ) = 0.16
Общие выводы по работе
Объектом управления является теплица. Управляющим воздействием на объект является температура теплоносителя. Возмущающим воздействием является температура наружного воздуха.
Закон регулирования системы – пропорциональный.
Система устойчива. Запас устойчивости по амплитуде ![]()
Запас устойчивости по фазе примерно 640 , что удовлетворяет рекомендуемым запасам устойчивости.
Система является статической, т.к. статическая ошибка е = 0.17З .
Прямые показатели качества: перерегулирование = 13%, число перегулирований и колебаний N = 1, что удовлетворяет предъявленным требованиям ![]() и свидетельствует о достаточном запасе устойчивости.
и свидетельствует о достаточном запасе устойчивости.
Время регулирования около 446 с.
Качество системы следует считать удовлетворительным.
Литература
1. Методическое указание «Основы автоматики».
2. Юревич Е.Н. «Теория автоматического управления». – М.: Энергия, 1975 г.
3. Бохан Н.И., Бородин И.Ф., Дробышев Ю.В. «Средства автоматики и телемеханики». – М.: Агропромиздат. 1995 г.